






 Математика
Математика Информатика
ИнформатикаПохожие презентации:

 цифрового (автоматизированного) проектирования")








Формализованное представление ЭА при автоматизированном проектировании
1. Лекция 3 Формализованное представление ЭА при автоматизированном проектировании
1 Описание графов с помощью матриц2 Формальное описание коммутационных
схем
3 Основная модель монтажного пространства
2. Вопрос 1 Описание графов с помощью матриц
3.
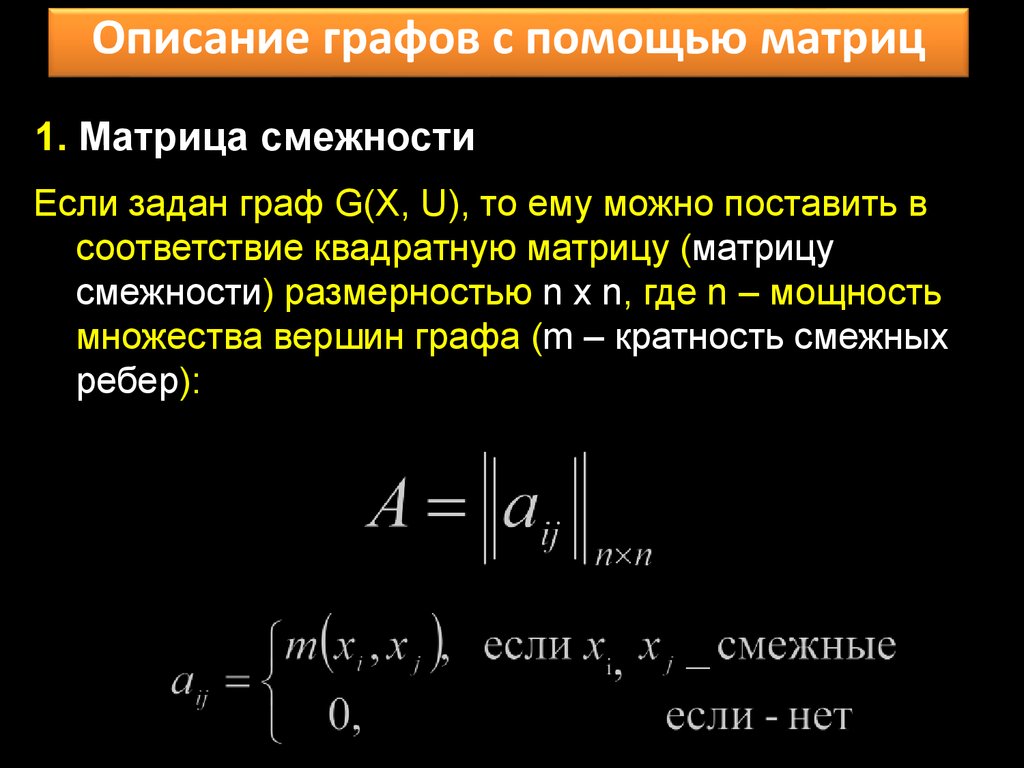
Описание графов с помощью матриц1. Матрица смежности
Если задан граф G(X, U), то ему можно поставить в
соответствие квадратную матрицу (матрицу
смежности) размерностью n x n, где n – мощность
множества вершин графа (m – кратность смежных
ребер):
4.
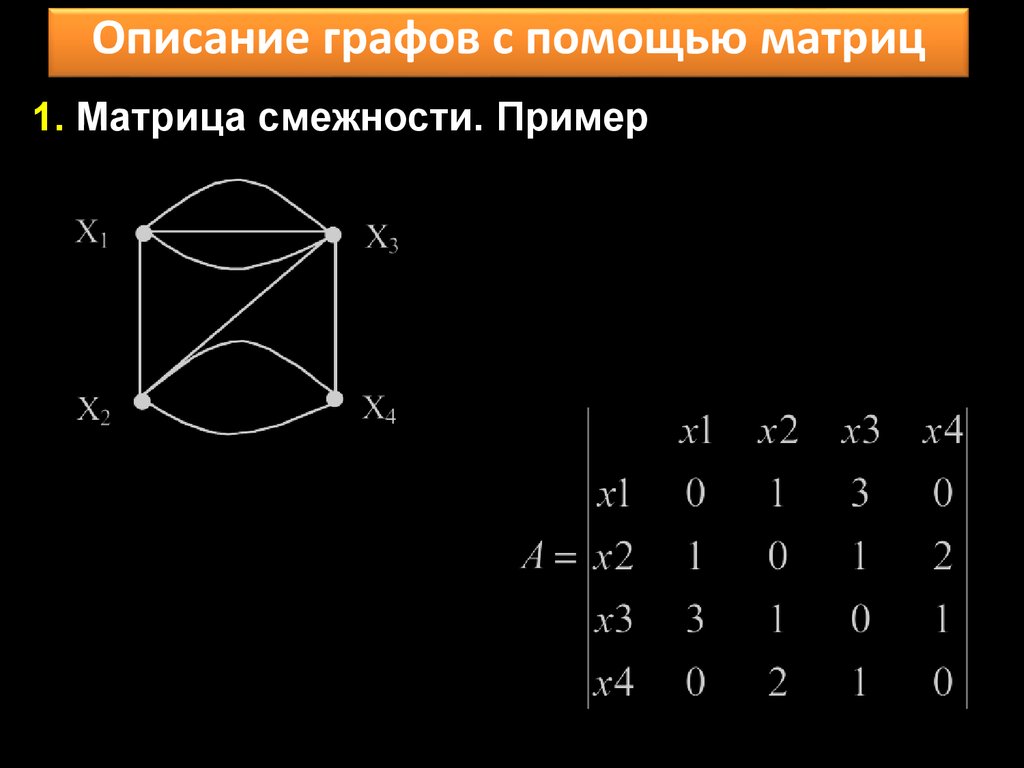
Описание графов с помощью матриц1. Матрица смежности. Пример
5.
Описание графов с помощью матриц2. Матрица весовых соотношений
строятся аналогично матрицам смежности, но
значения их элементов определяются весом ребра
графа (Tij – вес связи):
6.
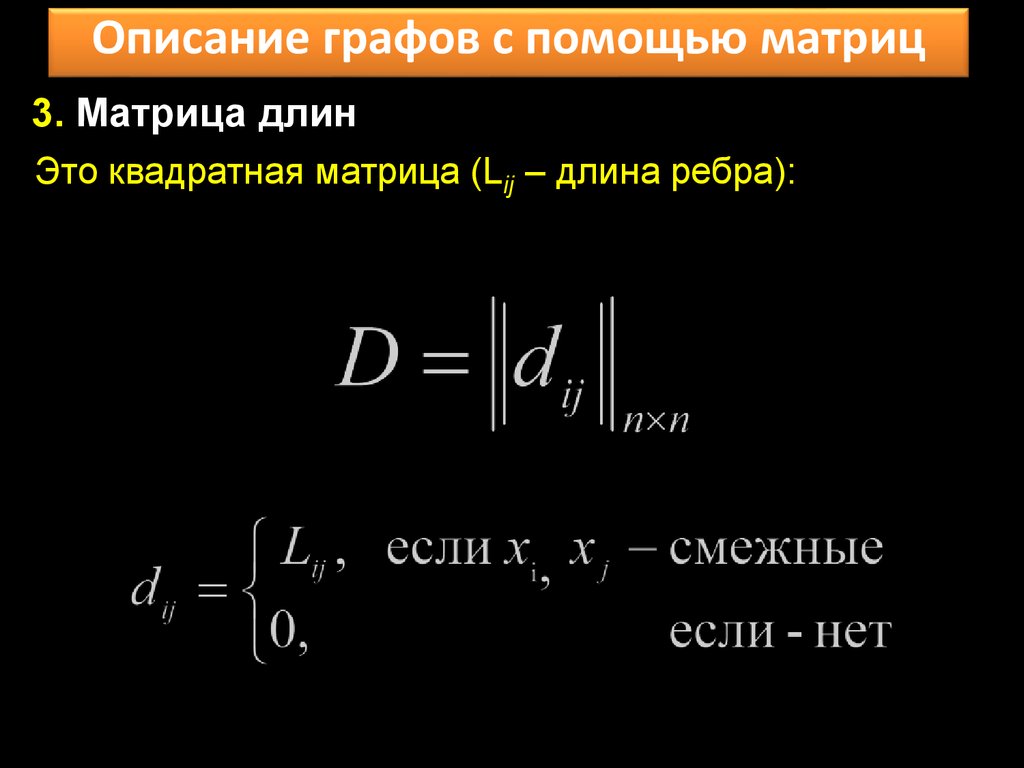
Описание графов с помощью матриц3. Матрица длин
Это квадратная матрица (Lij – длина ребра):
7.
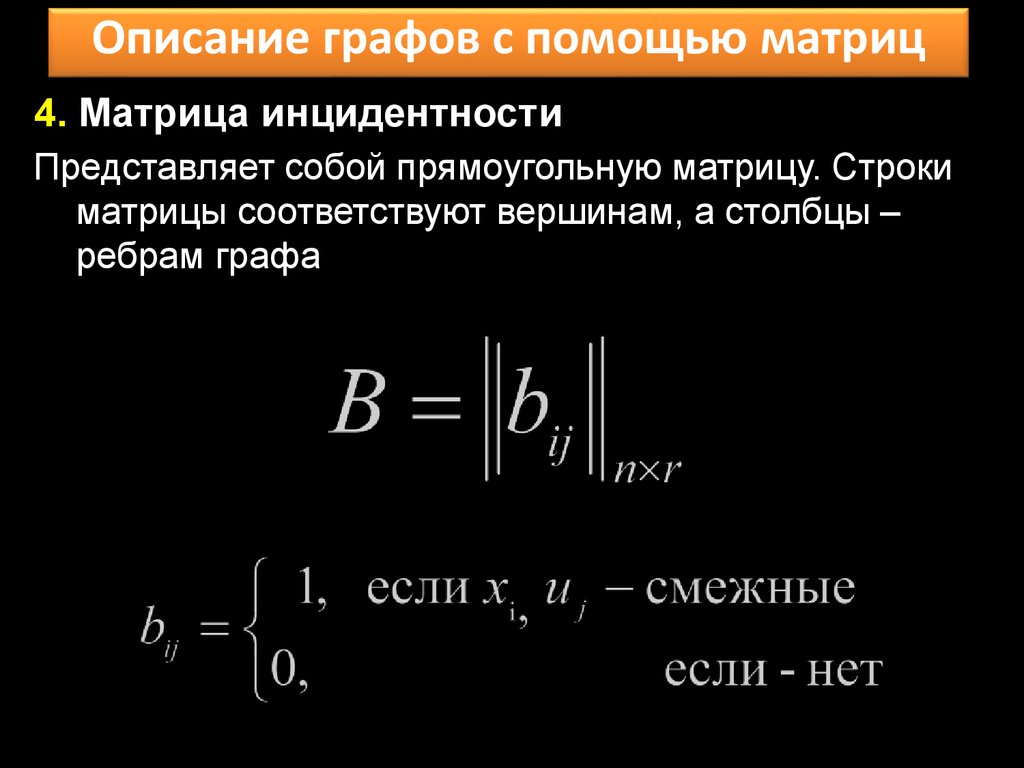
Описание графов с помощью матриц4. Матрица инцидентности
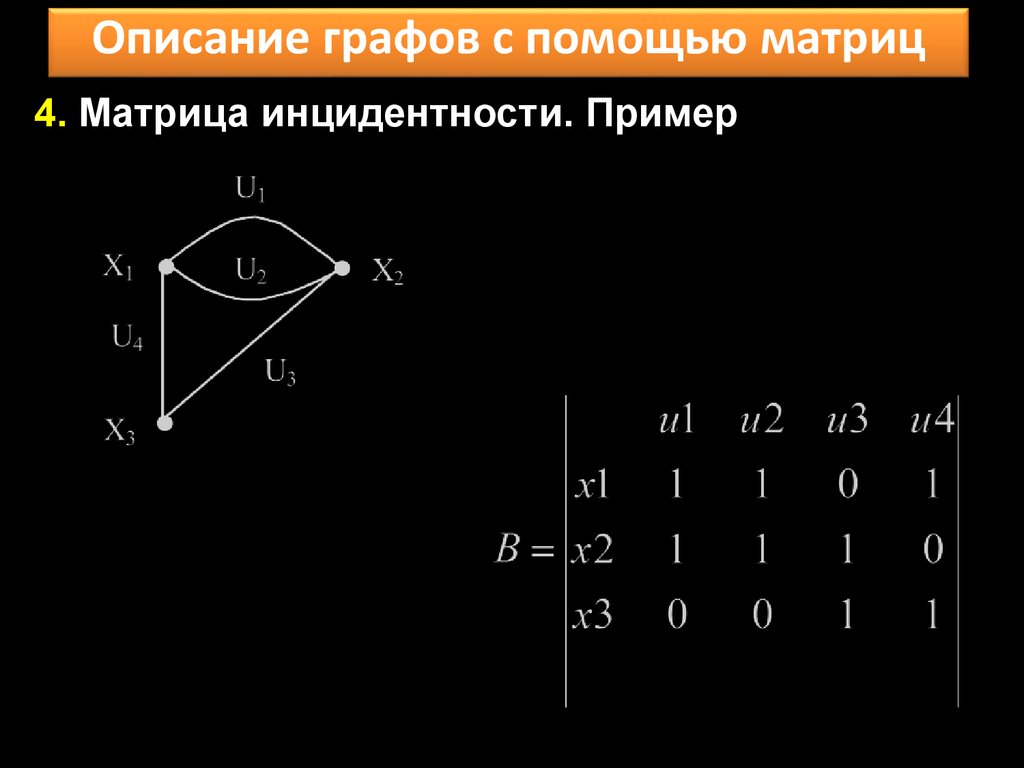
Представляет собой прямоугольную матрицу. Строки
матрицы соответствуют вершинам, а столбцы –
ребрам графа
8.
Описание графов с помощью матриц4. Матрица инцидентности. Пример
9.
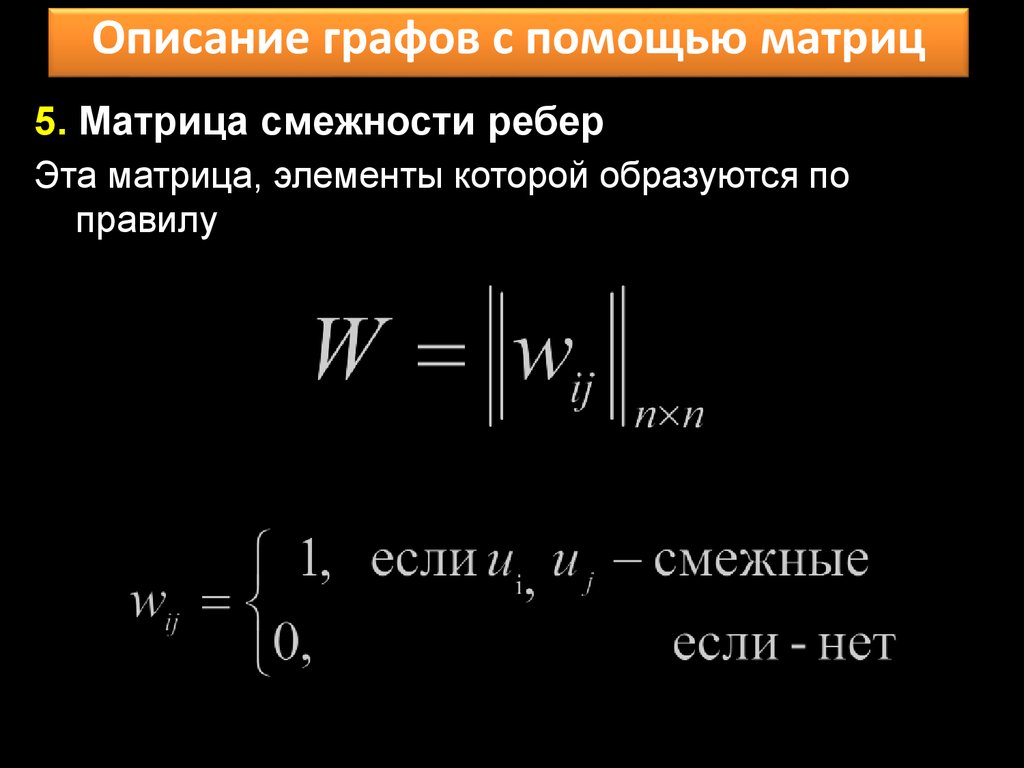
Описание графов с помощью матриц5. Матрица смежности ребер
Эта матрица, элементы которой образуются по
правилу
10.
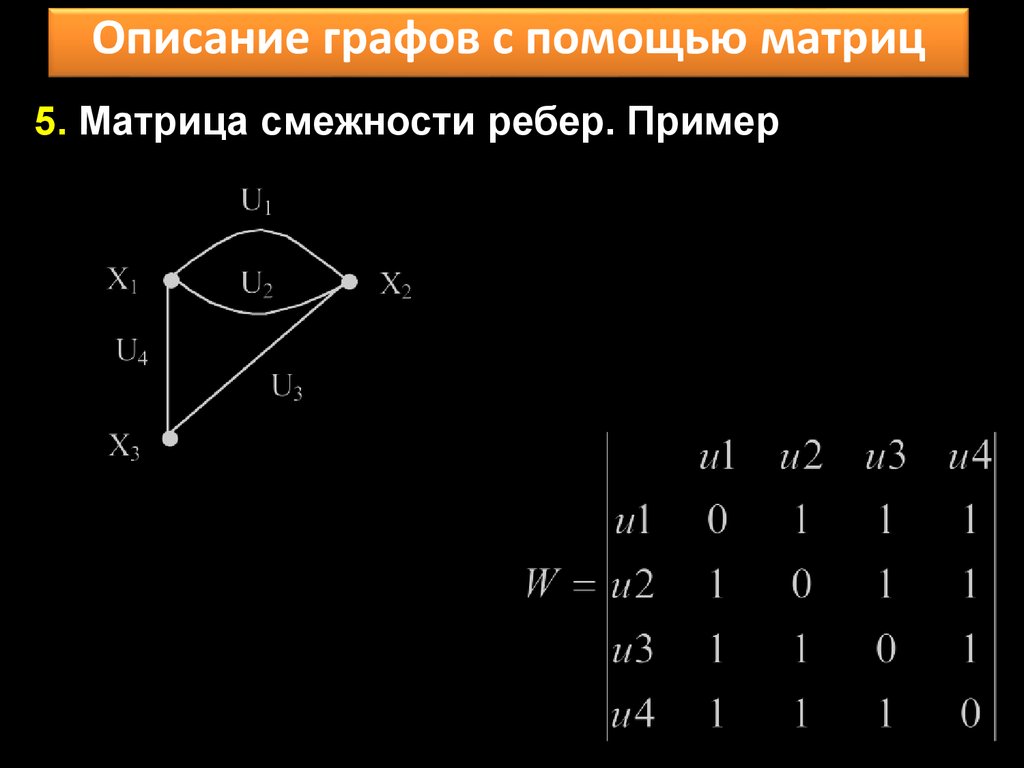
Описание графов с помощью матриц5. Матрица смежности ребер. Пример
11. Вопрос 2 Формальное описание коммутационных схем
12.
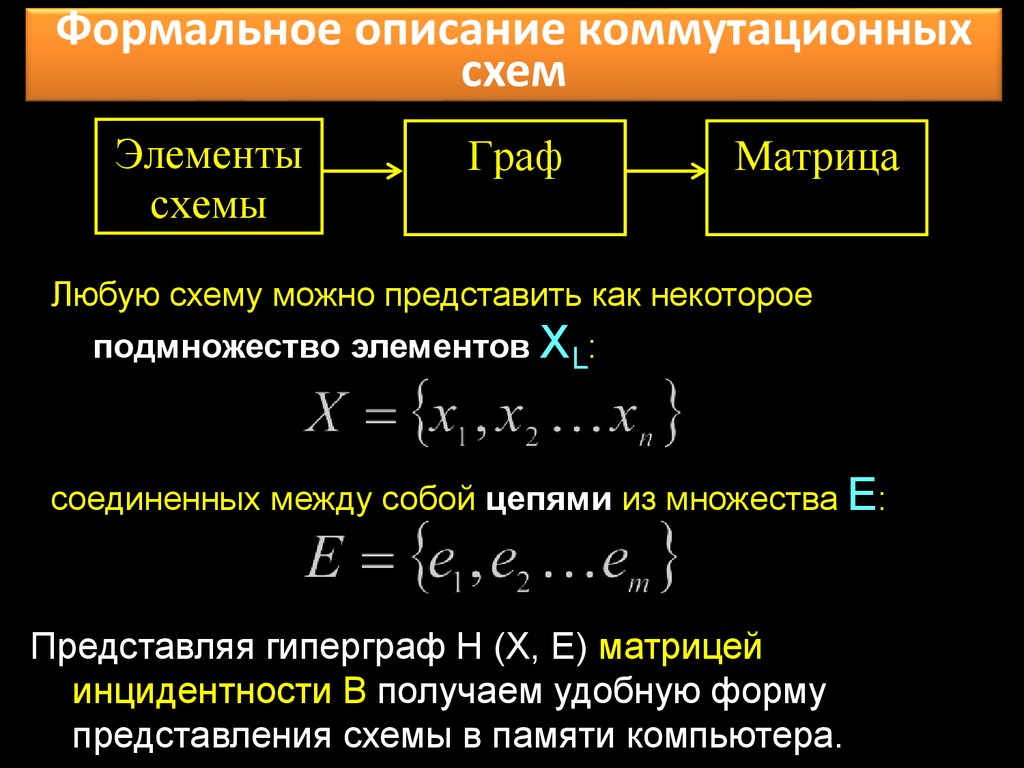
Формальное описание коммутационныхсхем
Элементы
схемы
Граф
Матрица
Любую схему можно представить как некоторое
подмножество элементов XL:
соединенных между собой цепями из множества Е:
Представляя гиперграф H (X, E) матрицей
инцидентности B получаем удобную форму
представления схемы в памяти компьютера.
13.
Формальное описание коммутационныхсхем
Электрическую схему задают также в виде матрицы цепей:
Каждый элемент схемы имеет некоторое множество
соединительных выводов, которые называются
множеством контактов
C.
14.
Формальное описание коммутационныхсхем
Тогда любую схему можно задать в виде графа:
F – определяет принадлежность контактов из
множества С элементам Х;
W - задаются вхождением контакта из множества С в
цепи Е.
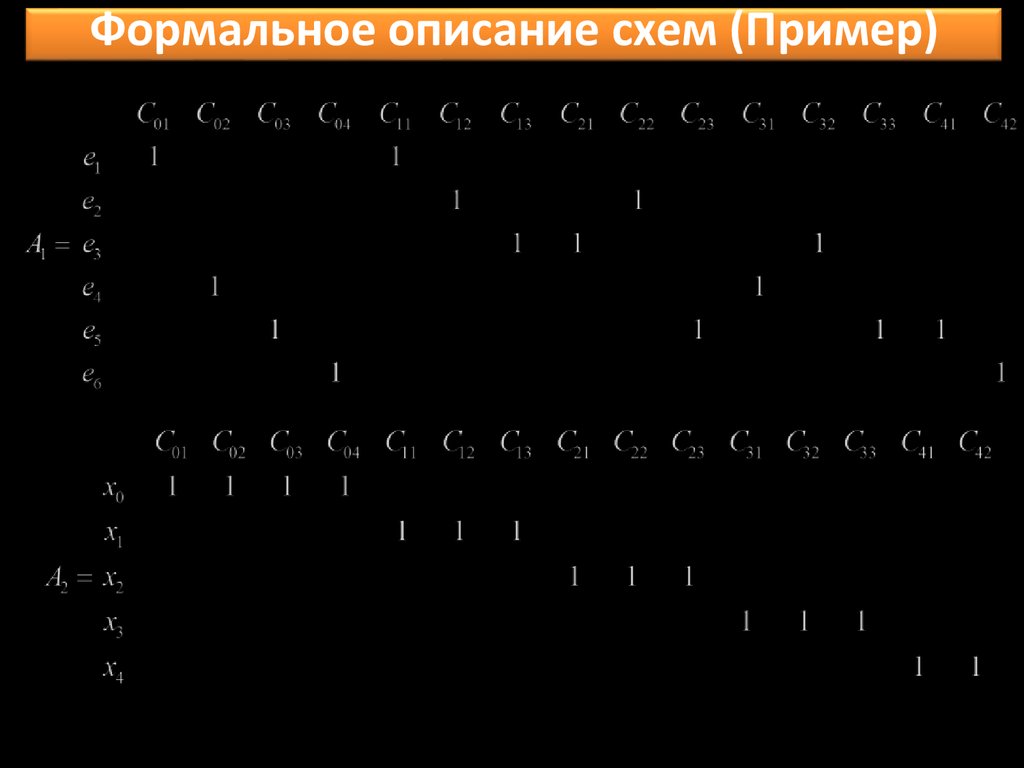
15.
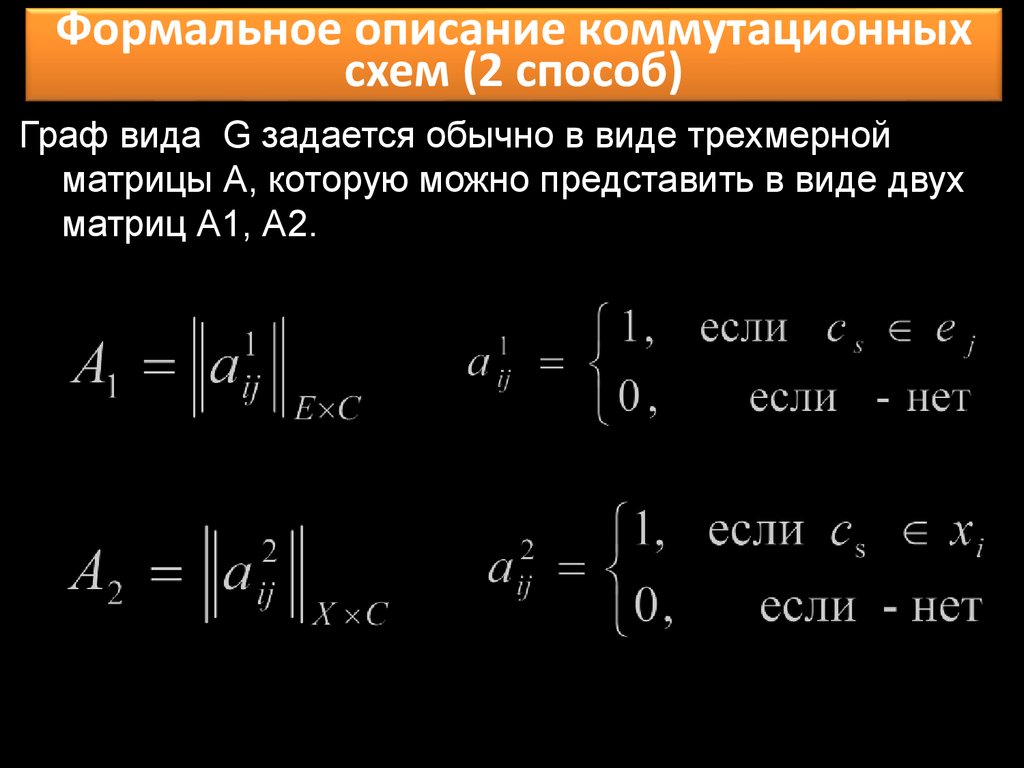
Формальное описание коммутационныхсхем (2 способ)
Граф вида G задается обычно в виде трехмерной
матрицы А, которую можно представить в виде двух
матриц А1, А2.
16.
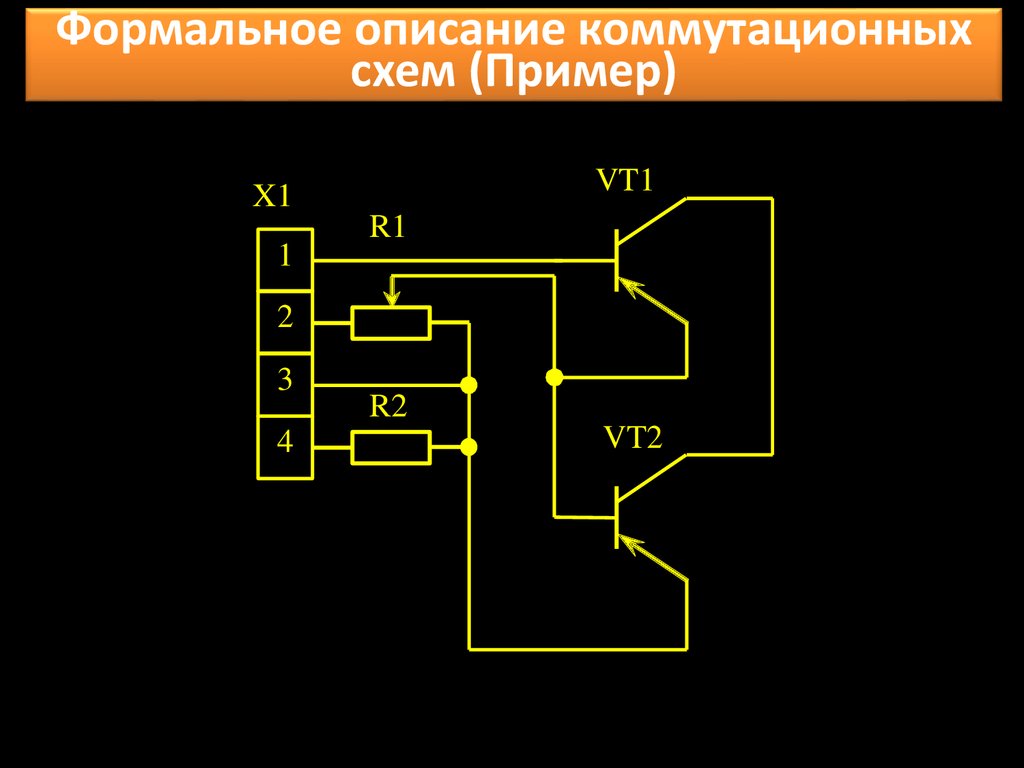
Формальное описание коммутационныхсхем (Пример)
VT1
X1
1
R1
2
3
4
R2
VT2
17.
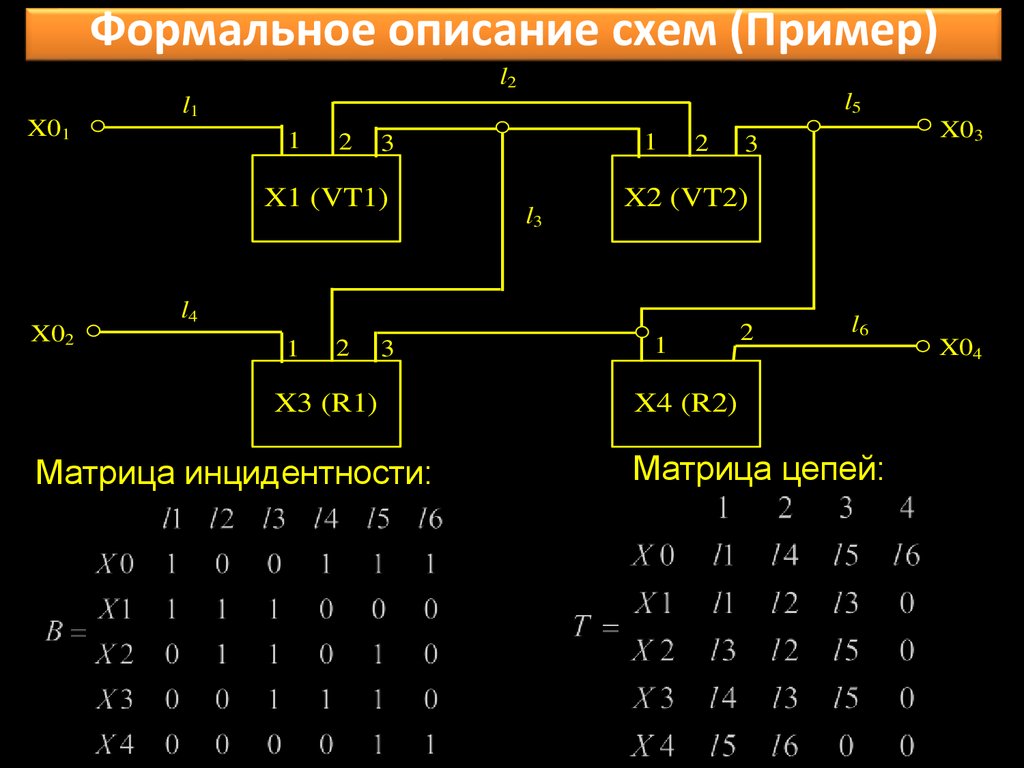
Формальное описание схем (Пример)l2
X01
l5
l1
1
2
X1 (VT1)
X02
1
3
l3
2
X2 (VT2)
l4
1
2
3
X3 (R1)
Матрица инцидентности:
X03
3
1
2
l6
X4 (R2)
Матрица цепей:
X04
18.
Формальное описание схем (Пример)e2
С01
e5
e1
C11 C12 C13
C21 C22 C23
X1 (VT1)
С02
l3
X2 (VT2)
e4
C31 C32 C33
C41
X3 (R1)
Часть графа:
C21
C12
X2
e2
C22
C02
C01
X0
e6
e3
X1
e1
C42
X4 (R2)
C13
C11
C03
C04
C23
С03
С04
19.
Формальное описание схем (Пример)20. Вопрос 3 Основная модель монтажного пространства
21.
Модель монтажного пространства(монтажного поля)
δ
1
2
X
n
n+1
Y
Монтажным пространством элементов конструкций
называется некоторая область, ограниченная
габаритами этих элементов.
Двумерное монтажное пространство называется
монтажным полем.
Различают регулярное и нерегулярное монтажное поле.
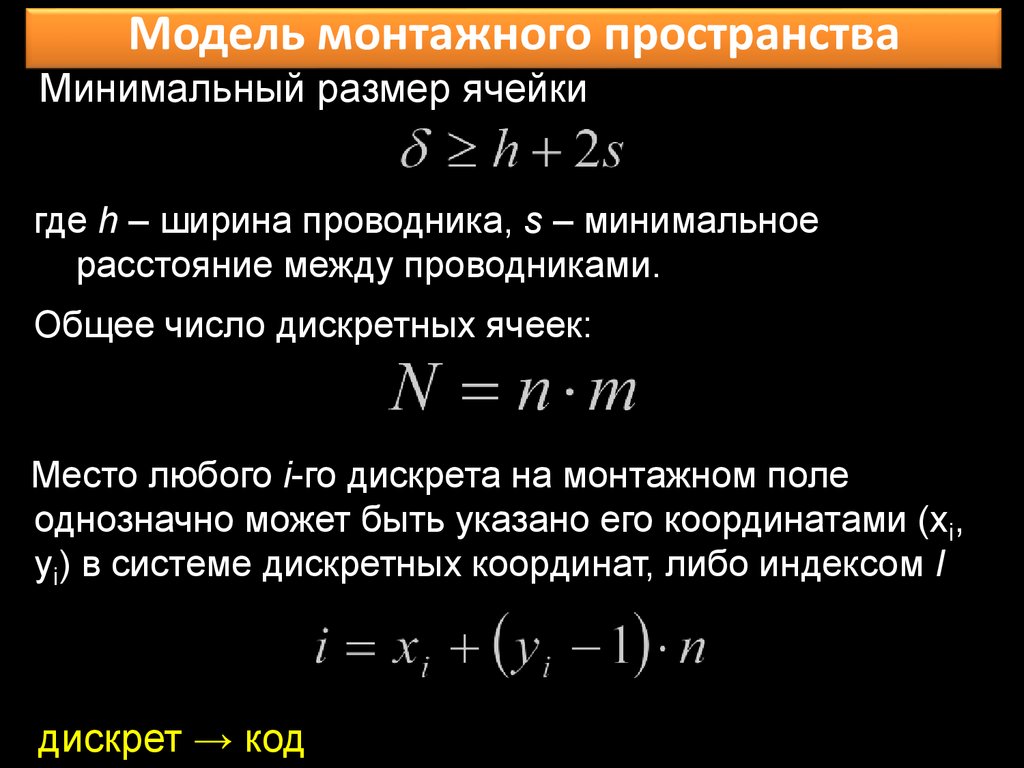
22.
Модель монтажного пространстваМинимальный размер ячейки
где h – ширина проводника, s – минимальное
расстояние между проводниками.
Общее число дискретных ячеек:
Место любого i-го дискрета на монтажном поле
однозначно может быть указано его координатами (xi,
yi) в системе дискретных координат, либо индексом I
дискрет → код
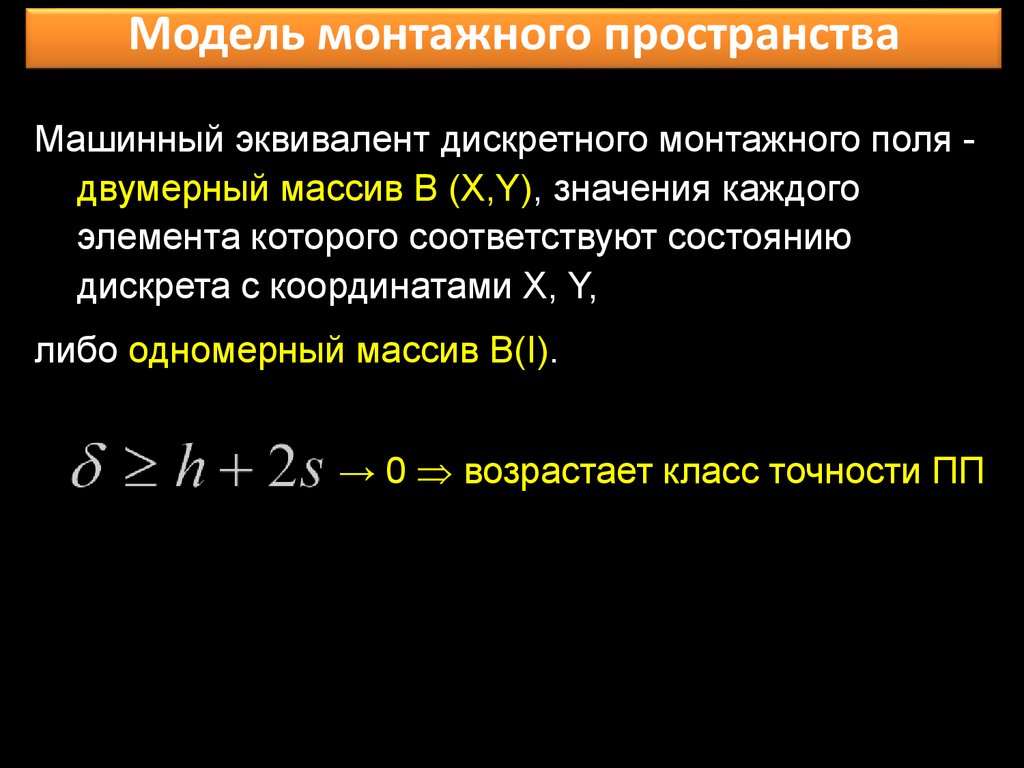
23.
Модель монтажного пространстваМашинный эквивалент дискретного монтажного поля двумерный массив B (X,Y), значения каждого
элемента которого соответствуют состоянию
дискрета с координатами X, Y,
либо одномерный массив B(I).
→ 0 возрастает класс точности ПП
24.
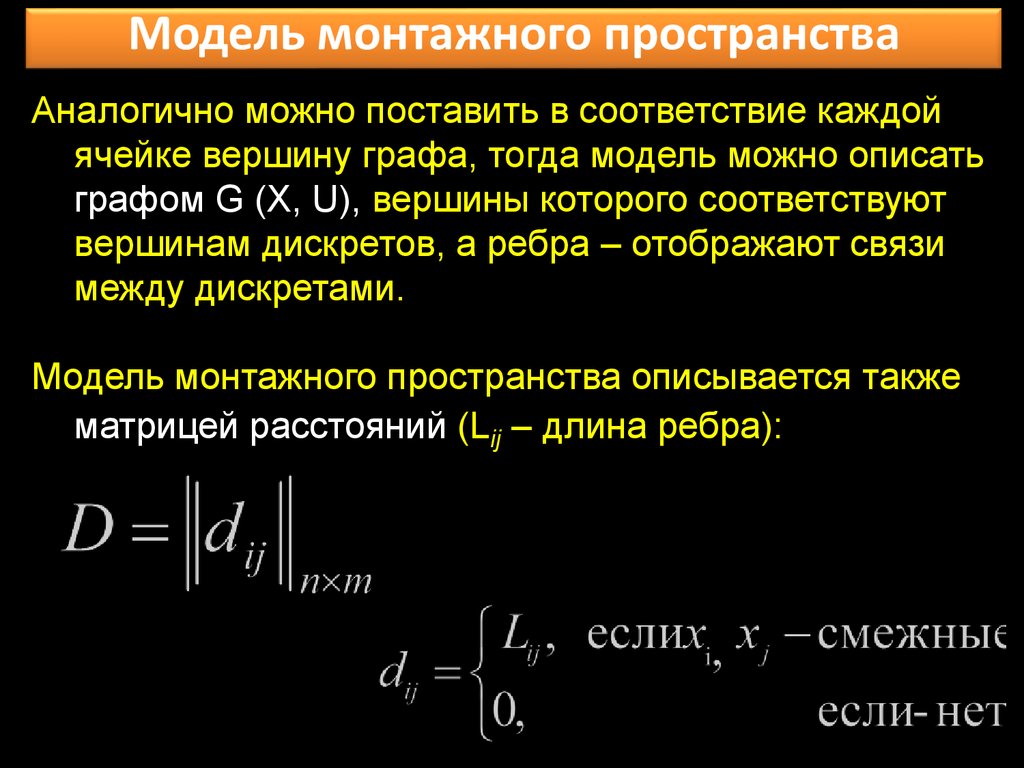
Модель монтажного пространстваАналогично можно поставить в соответствие каждой
ячейке вершину графа, тогда модель можно описать
графом G (X, U), вершины которого соответствуют
вершинам дискретов, а ребра – отображают связи
между дискретами.
Модель монтажного пространства описывается также
матрицей расстояний (Lij – длина ребра):
25.
Вопросы по прочитанномуматериалу?