




























 методом Гаусса")
 Математика
МатематикаПохожие презентации:
")








")
Линейная алгебра. Лекция №2. Часть 2
1. ЛЕКЦИЯ №2
ТЕМА ЛЕКЦИИ:«ЛИНЕЙНАЯ АЛГЕБРА»
2 часть
2. Матрицы
Элементарныепреобразования и
действия над матрицами
made by aspirin
3.
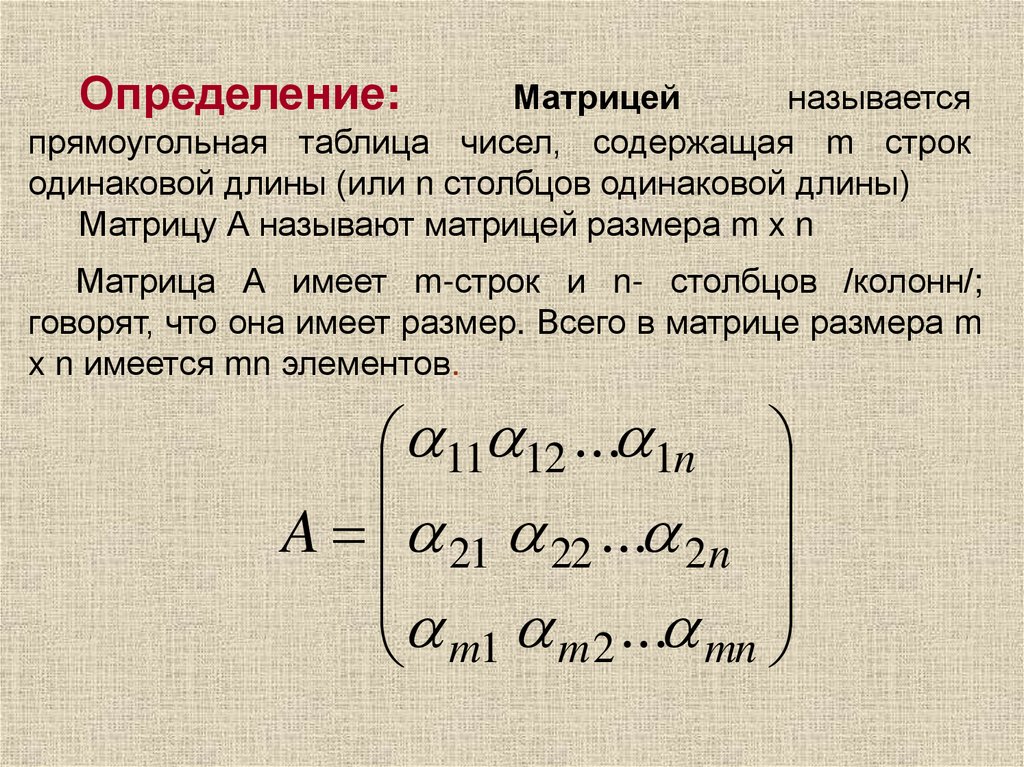
Определение:Матрицей
называется
прямоугольная таблица чисел, содержащая m строк
одинаковой длины (или n столбцов одинаковой длины)
Матрицу А называют матрицей размера m x n
Матрица А имеет m-строк и n- столбцов /колонн/;
говорят, что она имеет размер. Всего в матрице размера m
x n имеется mn элементов.
11 12 ... 1n
A 21 22 ... 2 n
...
m1 m 2 mn
4.
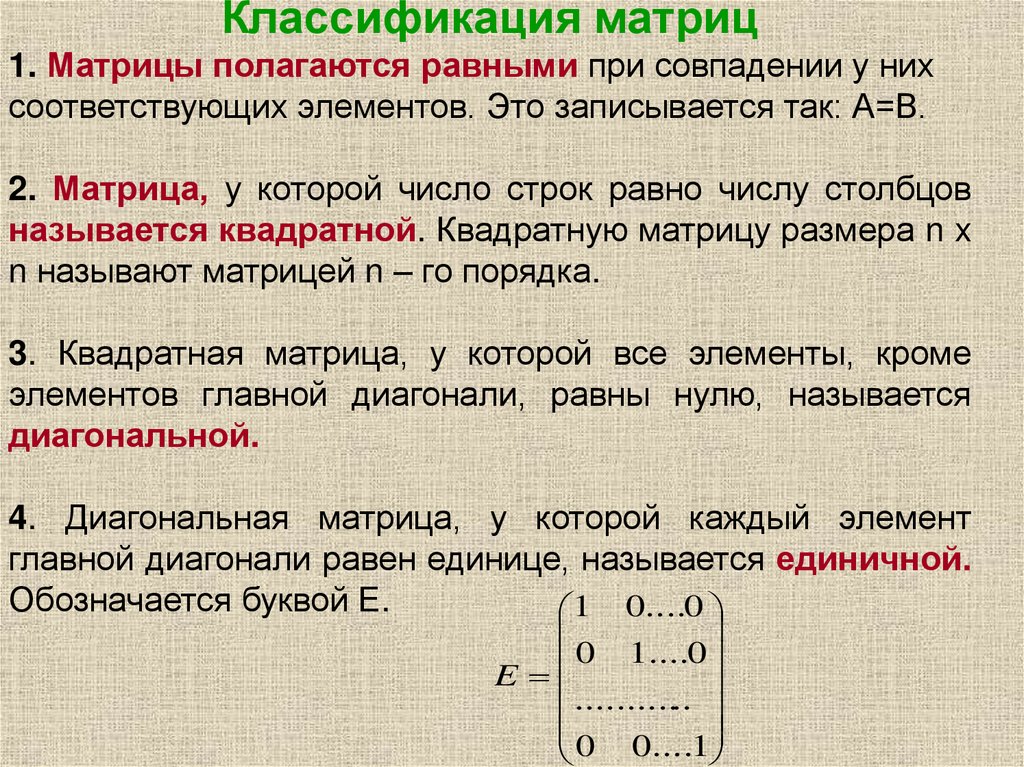
Классификация матриц1. Матрицы полагаются равными при совпадении у них
соответствующих элементов. Это записывается так: А=В.
2. Матрица, у которой число строк равно числу столбцов
называется квадратной. Квадратную матрицу размера n x
n называют матрицей n – го порядка.
3. Квадратная матрица, у которой все элементы, кроме
элементов главной диагонали, равны нулю, называется
диагональной.
4. Диагональная матрица, у которой каждый элемент
главной диагонали равен единице, называется единичной.
Обозначается буквой Е.
1 0....0
0 1....0
E
............
0 0....1
5. 5. Квадратная матрица называется треугольной, если все элементы, расположенные по одну сторону от главной диагонали равны нулю.
6. Матрица, все элементы которой равны нулю,называется нулевой. Обозначается буквой О.
7. Матрица, содержащая один столбец или одну строку,
называется вектором (или вектор – столбец, или
вектор - строка).
8.Матрица АТ называется транспонированной к А,
если в матрице А строки заменены на столбцы
соответствующих номеров:
a11 am1
a11 am1
A
, то AТ
a a
a a
mn
mn
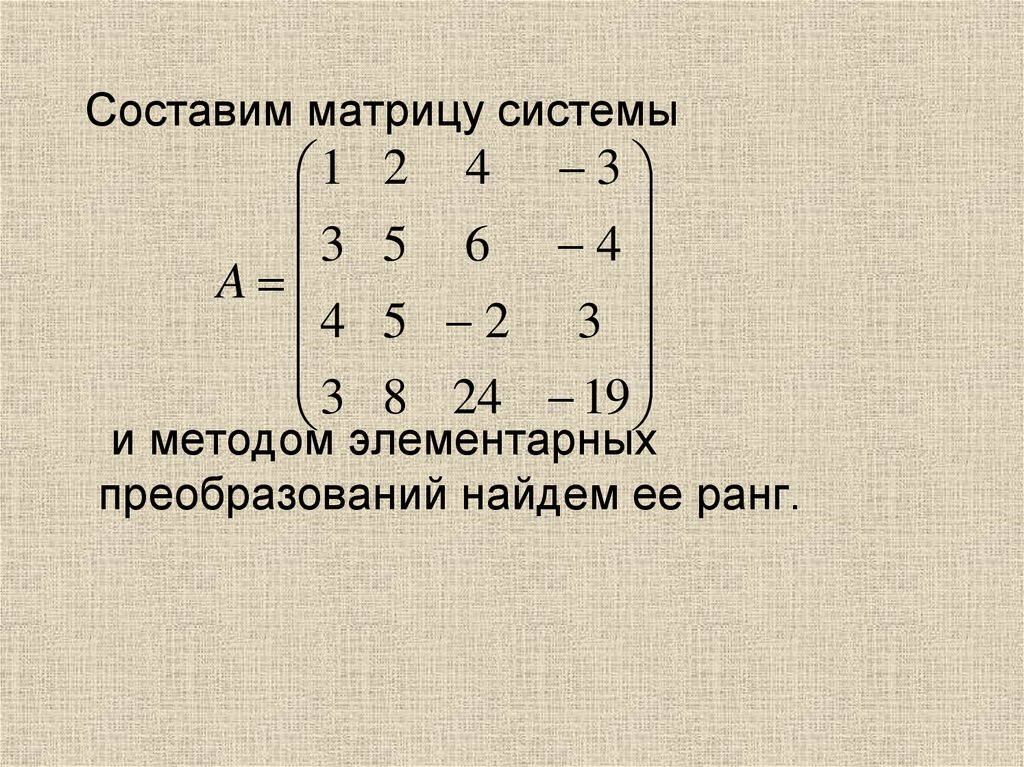
m1
1n
6. Элементарные преобразования матриц
1. Перестановка местами двух параллельных рядовматрицы;
2. Умножение всех элементов ряда матрицы на число
отличное от нуля;
3. Прибавление ко всем элементам ряда матрицы
соответствующих
элементов
параллельного
ряда,
умноженных на одно и тоже число.
Две матрицы А и В называются эквивалентными, если
одна из них получается из другой с помощью
элементарных преобразований. Записывается А В.
При помощи элементарных преобразований любую
матрицу можно привести к матрице, у которой в начале
главной диагонали стоят подряд несколько единиц, а все
остальные элементы равны нулю. Такую матрицу
называют канонической.
7. Действия над матрицами
• Суммой матриц одинакового размера называетсяматрица,
элементы
которой
равны
сумме
соответствующих
элементов
матриц-слагаемых.
Обозначение:
А+В.
Аналогично
определяется
разность матриц.
• При умножении матрицы на число, умножаются
все элементы данной матрицы.
a11 a12
A
a21 a22
8.
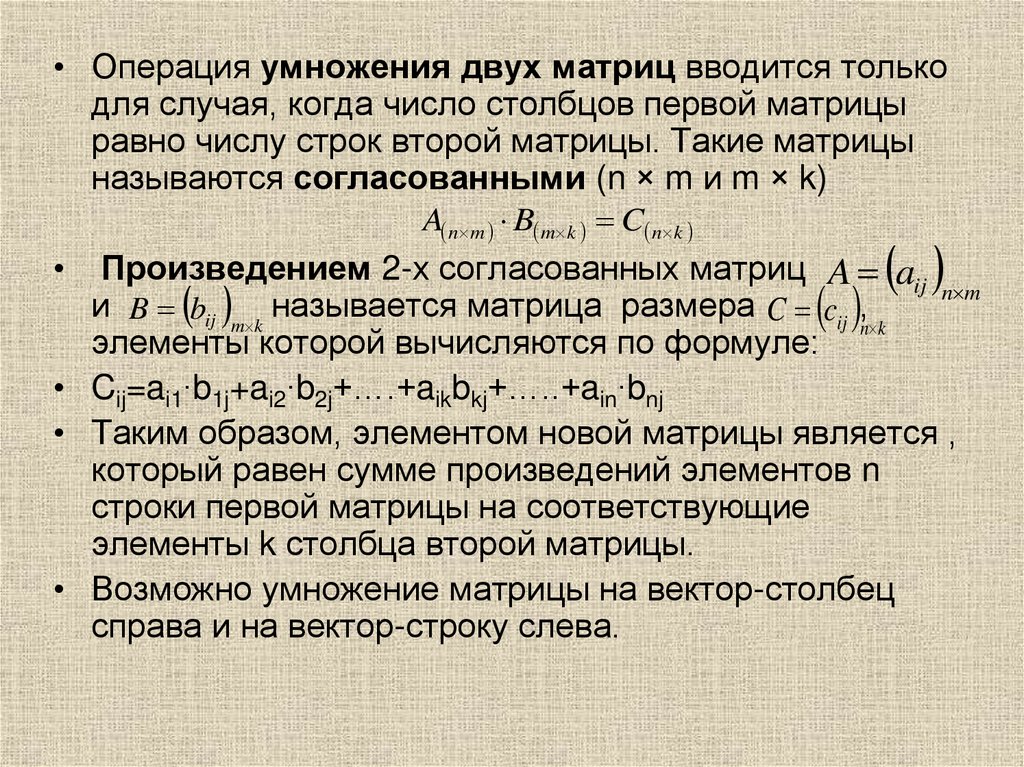
• Операция умножения двух матриц вводится толькодля случая, когда число столбцов первой матрицы
равно числу строк второй матрицы. Такие матрицы
называются согласованными (n × m и m × k)
A n m B m k C n k
• Произведением 2-х согласованных матриц A aij
n m
и B bij m k называется матрица размера C cij ,
n k
элементы которой вычисляются по формуле:
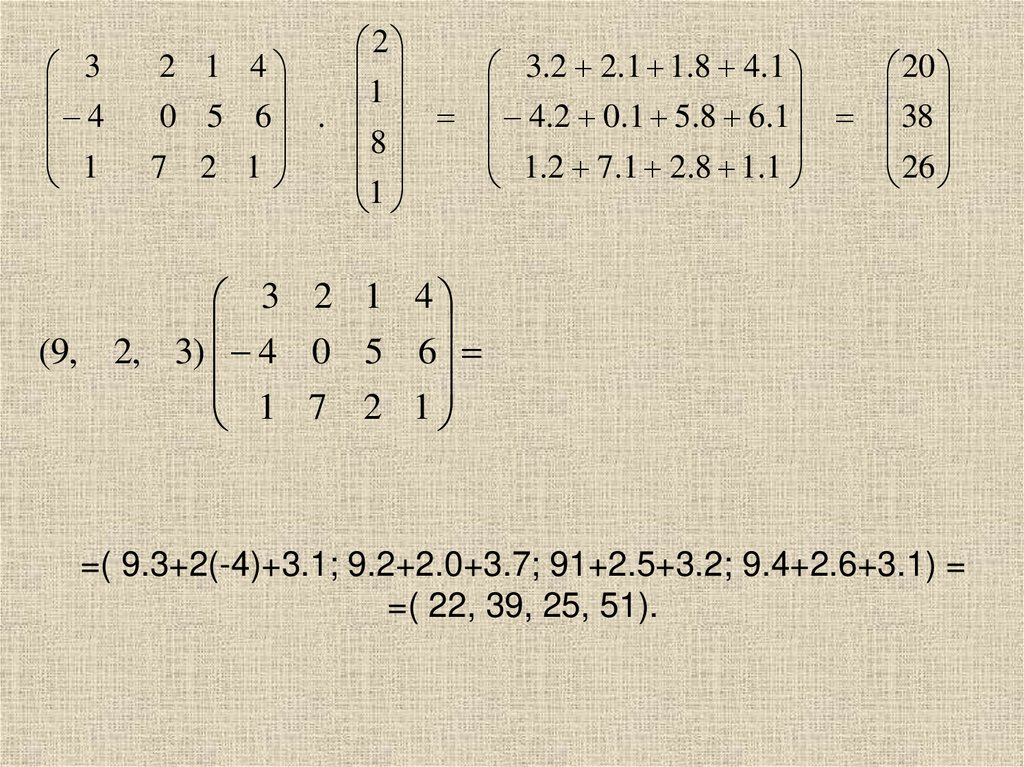
• Cij=ai1∙b1j+ai2∙b2j+….+aikbkj+…..+ain∙bnj
• Таким образом, элементом новой матрицы является ,
который равен сумме произведений элементов n
строки первой матрицы на соответствующие
элементы k столбца второй матрицы.
• Возможно умножение матрицы на вектор-столбец
справа и на вектор-строку слева.
9.
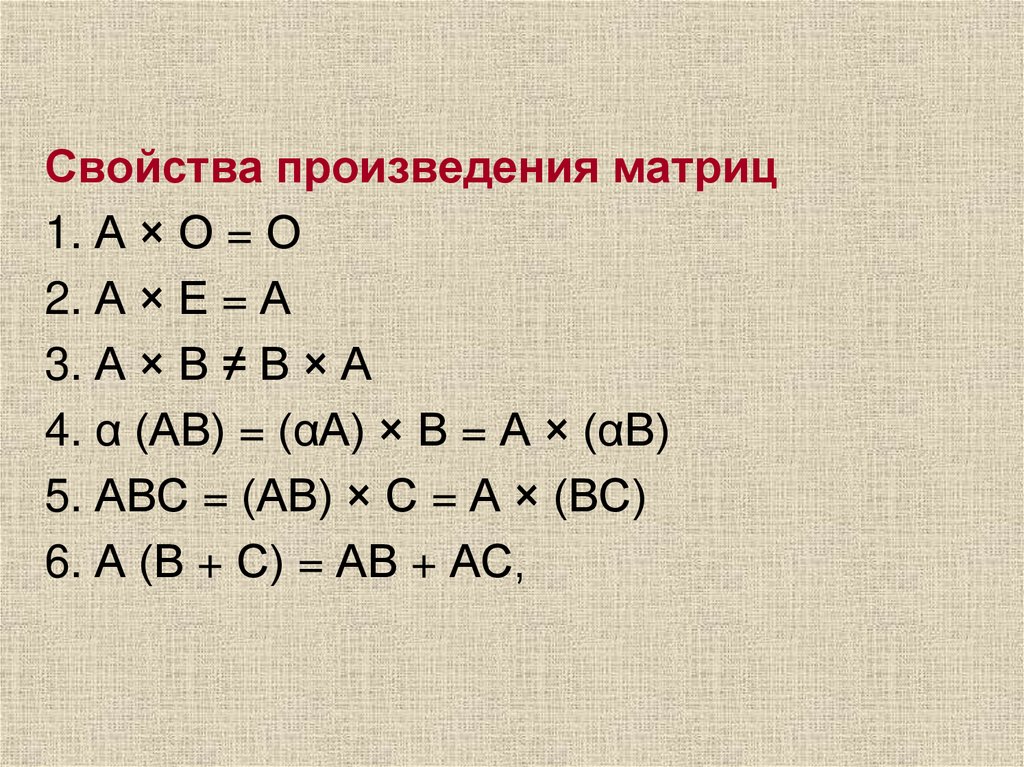
Свойства произведения матриц1. А × О = О
2. А × Е = А
3. А × В ≠ В × А
4. α (АВ) = (αА) × В = А × (αВ)
5. АВС = (АВ) × С = А × (ВС)
6. А (В + С) = АВ + АС,
10.
34
1
2
2 1 4
3.2 2.1 1.8 4.1
20
1
0 5 6 . 4.2 0.1 5.8 6.1 38
8
1.2 7.1 2.8 1.1
26
7 2 1
1
3 2 1 4
(9, 2, 3) 4 0 5 6
1 7 2 1
=( 9.3+2(-4)+3.1; 9.2+2.0+3.7; 91+2.5+3.2; 9.4+2.6+3.1) =
=( 22, 39, 25, 51).
11. Определители. Ранг матрицы.
12. Квадратной матрице А порядка n можно сопоставить число det A, называемое ее определителем, следующим образом: 1. n = 1. А =
(a1); det A = a12. n = 2. det A
a11a12
a21a22
a11 a22 a12 a21
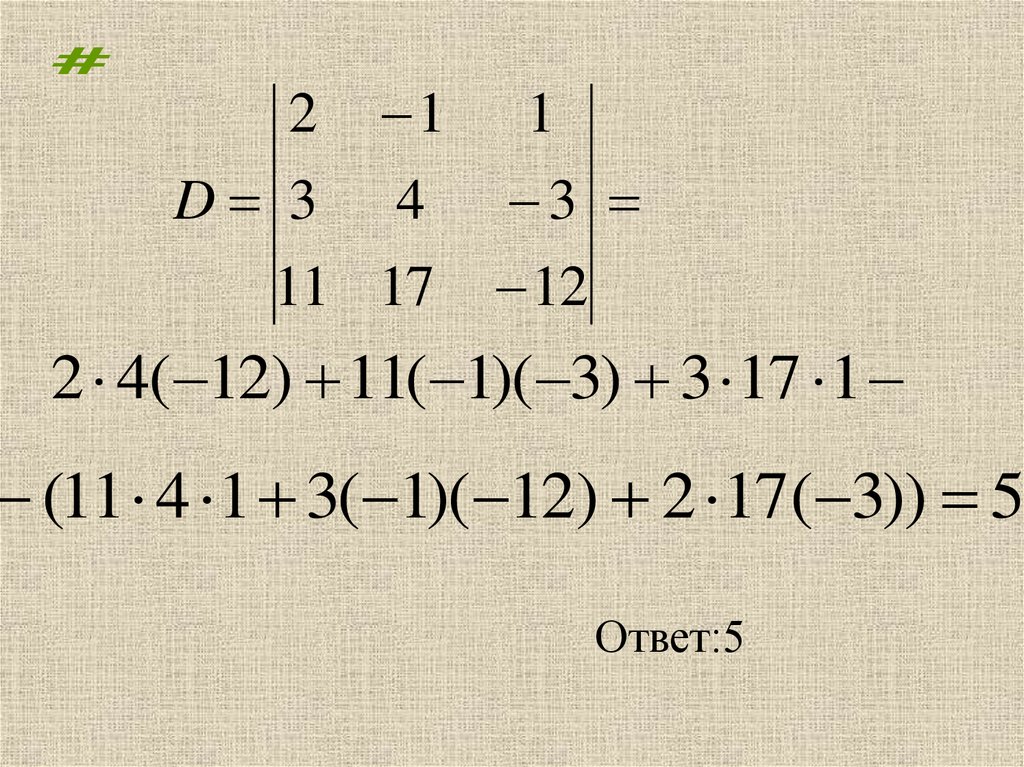
a11a12 a13
3. n = 3. det A a21a22 a23 a11a22 a33 a12 a23 a31
a31a32 a33
a13 a21a32 a31a22 a13 a32 a23 a11 a33 a21a12
13.
#2
D 3
1
4
11 17
1
3
12
2 4( 12) 11( 1)( 3) 3 17 1
(11 4 1 3( 1)( 12) 2 17( 3)) 5
Ответ:5
14. Определитель n-го порядка.
Записывается в виде квадратной таблицы, содержащейn2 элементов вида a ik , расположенных в n строках
и n столбцах:
a11a12 ...a1n
D
a21a22 ...a2 n
................
an1an 2 ...ann
15.
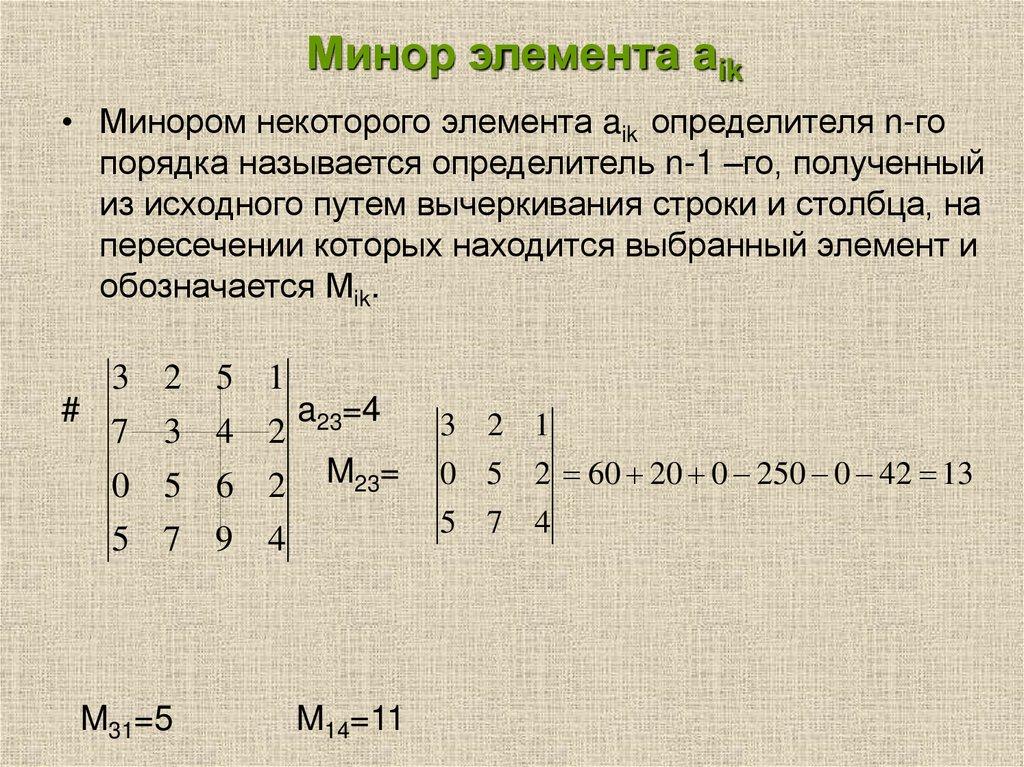
Минор элемента аik• Минором некоторого элемента aik определителя n-го
порядка называется определитель n-1 –го, полученный
из исходного путем вычеркивания строки и столбца, на
пересечении которых находится выбранный элемент и
обозначается Мik.
3 2 5 1
#
7 3 4 2
0 5 6 2
a23=4
M23=
0 5 2 60 20 0 250 0 42 13
5 7 4
5 7 9 4
M31=5
3 2 1
M14=11
16.
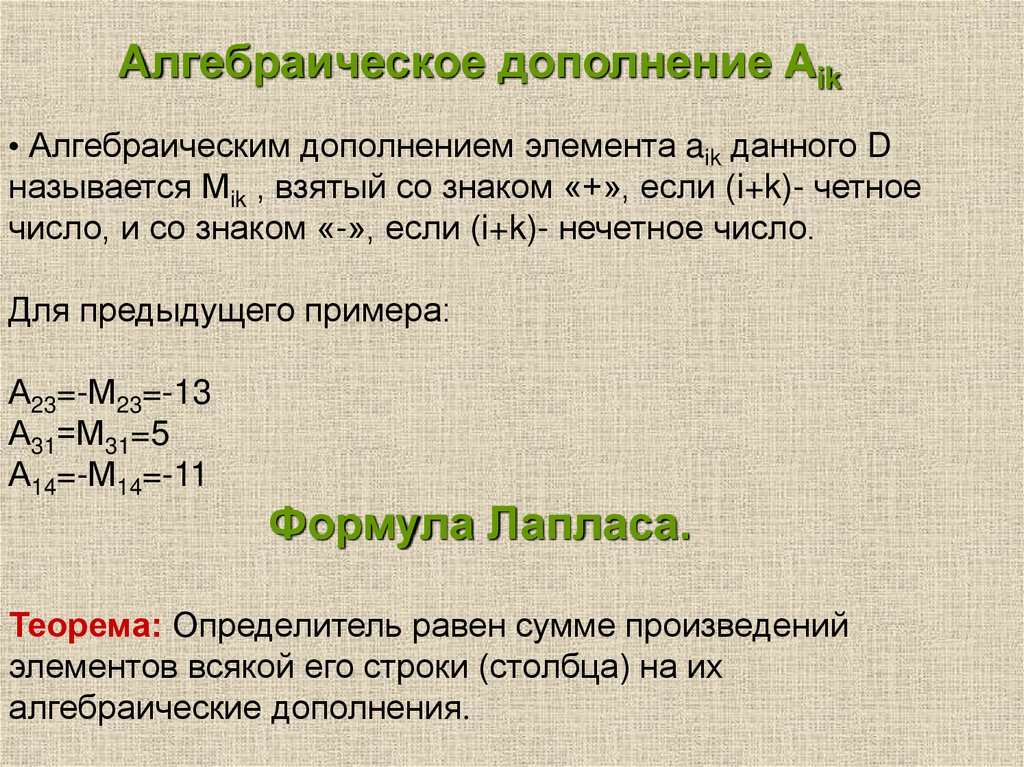
Алгебраическое дополнение Aik• Алгебраическим дополнением элемента aik данного D
называется Мik , взятый со знаком «+», если (i+k)- четное
число, и со знаком «-», если (i+k)- нечетное число.
Для предыдущего примера:
А23=-М23=-13
А31=М31=5
А14=-М14=-11
Формула Лапласа.
Теорема: Определитель равен сумме произведений
элементов всякой его строки (столбца) на их
алгебраические дополнения.
17.
21
2
4
3 2
11 17
11
1
12
1
1
4
3
3
4
17 12
2
1
1
17
12
2( 48 51) 2(12 17 ) 11(3 4)
6 10 11 5.
4
1
0
3
4
1
3
4 1
1 3
2 2 3 1 2 5
5
2 3 0 1
3
1
2
3
5 0 5
5 0 0 5
3
5
2
4
2(5 10 5 ( 14)) 2(50 70) 2 120 240
18.
Свойства определителей.1. Транспонирование определителя , т.е. замена строк
столбцами и наоборот, не меняет его значения.
3 5 6
3 4 5
4 2 1 5 2 3
5 3 2
6 1 2
2. Перестановка любых двух строк (столбцов) , меняет
только знак D.
D’=-D
19.
3. Общий множитель всех элементов одной строки(столбца) м.б. вынесен за знак D.
ma11
a12
a13
a11
a12
a13
ma21
a22
a23 m a21
a22
a23
ma31
a32
a33
a32
a33
a31
4. Если соответствующие элементы двух строк (столбцов)
равны или пропорциональны, то определитель равен 0.
20.
5. Если элементы какой-либо строки (столбца) состоятиз двух слагаемых, то определитель равен сумме двух
определителей, различающихся между собой только
элементами одной строки (столбца), бывшими ранее
отдельными слагаемыми.
6. Если к элементам одной строки (столбца) определителя
прибавить соответственные элементы другой строки или
одинаковые пропорциональные им числа ,то исходный
определитель не изменится.
21.
• Рангом матрицы А называется наивысшийпорядок отличного от нуля минора этой
матрицы.
• Ранг матрицы А обозначается rangA или r(A).
• Из определения следует:
• 1. Ранг матрицы Аmxnне превосходит меньшего
из ее размеров.
• 2. r(А)=0 тогда и только тогда , когда все
элементы матрицы равны 0.
• 3. Для квадратной матрицы n-ого порядка
r(А)=n, тогда и только , когда матрица А –
невырожденная.
22.
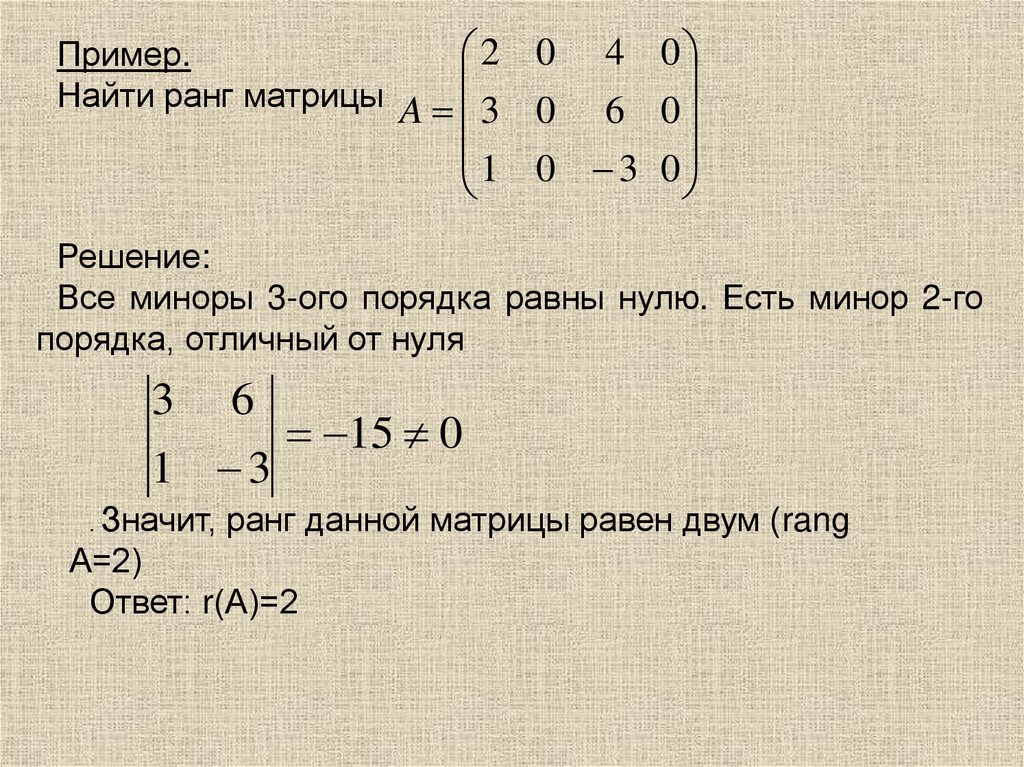
2Пример.
Найти ранг матрицы A 3
4 0
0 6 0
1 0 3 0
0
Решение:
Все миноры 3-ого порядка равны нулю. Есть минор 2-го
порядка, отличный от нуля
3
6
1 3
15 0
Значит, ранг данной матрицы равен двум (rang
А=2)
Ответ: r(А)=2
.
23. Свойства ранга матрицы
1. При транспонировании матрицы ее ранг неменяется.
2. Если вычеркнуть из матрицы нулевой ряд, то ранг
матрицы не изменится.
3. Ранг матрицы не изменяется при элементарных
преобразованиях матрицы.
Ранг канонической матрицы равен числу единиц на
главной диагонали. На этом основан один из способов
вычисления ранга матрицы.
Пример: найти ранг матрицы
2 3 1 2
1 0 0 0
1 0 0 0
А 0 2 1 1 А 0 1 0 0
0 1 0 0
4 0 5 1
0 0 0 0
rang A = 2
24. Решение систем линейных уравнений. Матричный метод. Формулы Крамера.
25. Невырожденные матрицы
• Квадратная матрица А называется невырожденной, еслиопределитель не равен нулю. В противном случае матрица
А называется вырожденной.
• Матрицей, союзной к матрице А, называется матрица
А11
* А12
А
...
А1n
А21
А22
...
А2 n
Аn1
... Аn 2
... ...
... Ann
...
Где Аik - алгебраическое дополнение элемента аik данной
матрицы А.
26. Матричный метод решения системы Матричная запись системы
a11 x1 a1n x n b1a x a x b
nn
n
n
n1 1
a11a12 ...a1n
A a21a22 ...a2 n ;
a a ...a
m1 m 2 mn
x1
b1
x2
b2
Х ; В .
:
:
x
b
n
m
27.
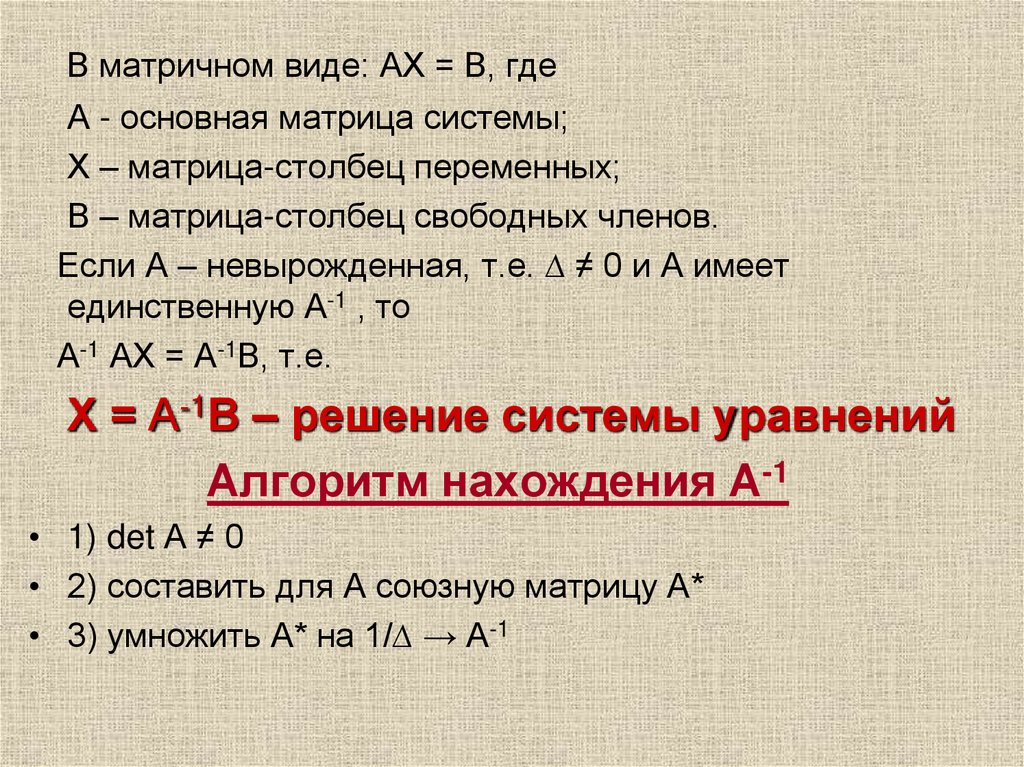
В матричном виде: АХ = В, гдеА - основная матрица системы;
Х – матрица-столбец переменных;
В – матрица-столбец свободных членов.
Если А – невырожденная, т.е. ∆ ≠ 0 и А имеет
единственную А-1 , то
А-1 АХ = А-1В, т.е.
Х = А-1В – решение системы уравнений
Алгоритм нахождения А-1
• 1) det А ≠ 0
• 2) составить для А союзную матрицу А*
• 3) умножить А* на 1/∆ → А-1
28. Алгоритм решения систем линейных уравнений матричным методом
1. Составляем матрицы А, В и Х2. Вычисляем определитель матрицы А
3. Находим обратную матрицу А-1
4. Находим решение системы уравнений по формуле:
Х=А-1В
29. Пример
x 2 x x 22
3
1
3 x1 x 2 2 x3 6
x 2x 2x 5
2
3
1
.
1
A 3
1
x
2 1
1
2
1 2 , B 6 , X x
2
5
x
2 2
3
30.
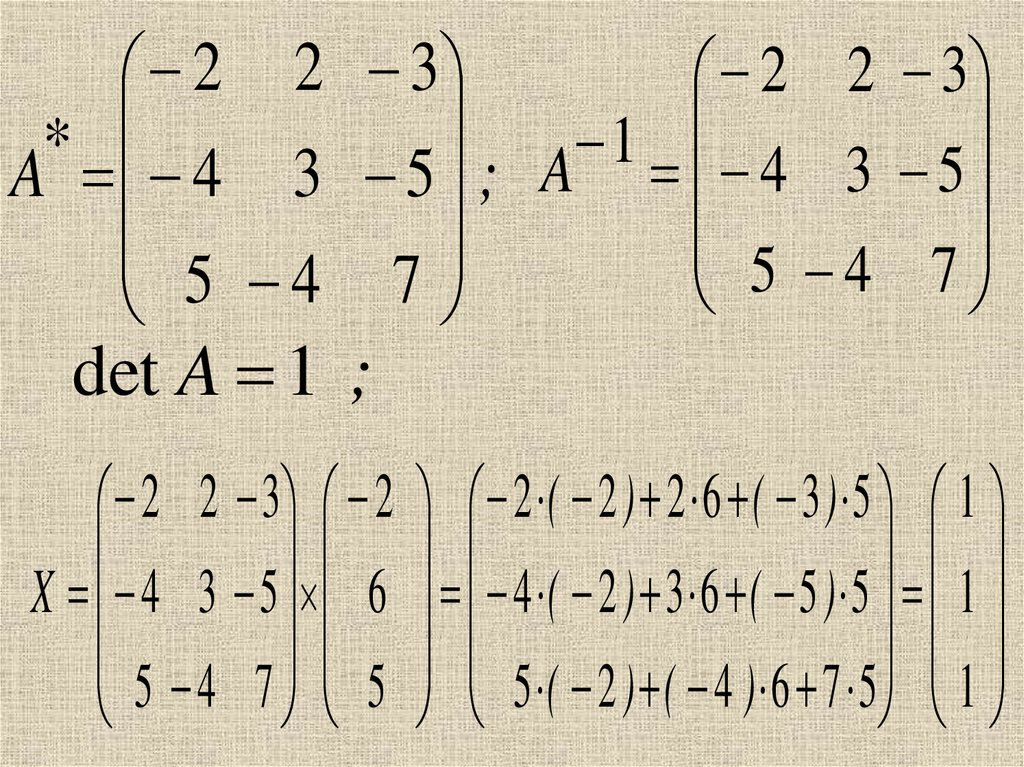
2 2*
A 4 3
5 4
det A 1
3
2 2 3
1
5 ; A 4 3 5
5 4 7
7
;
2 2 3 2
X 4 3 5 6
5 4 7 5
2 ( 2 ) 2 6 ( 3 ) 5 1
4 ( 2 ) 3 6 ( 5 ) 5 1
5 ( 2 ) ( 4 ) 6 7 5 1
31.
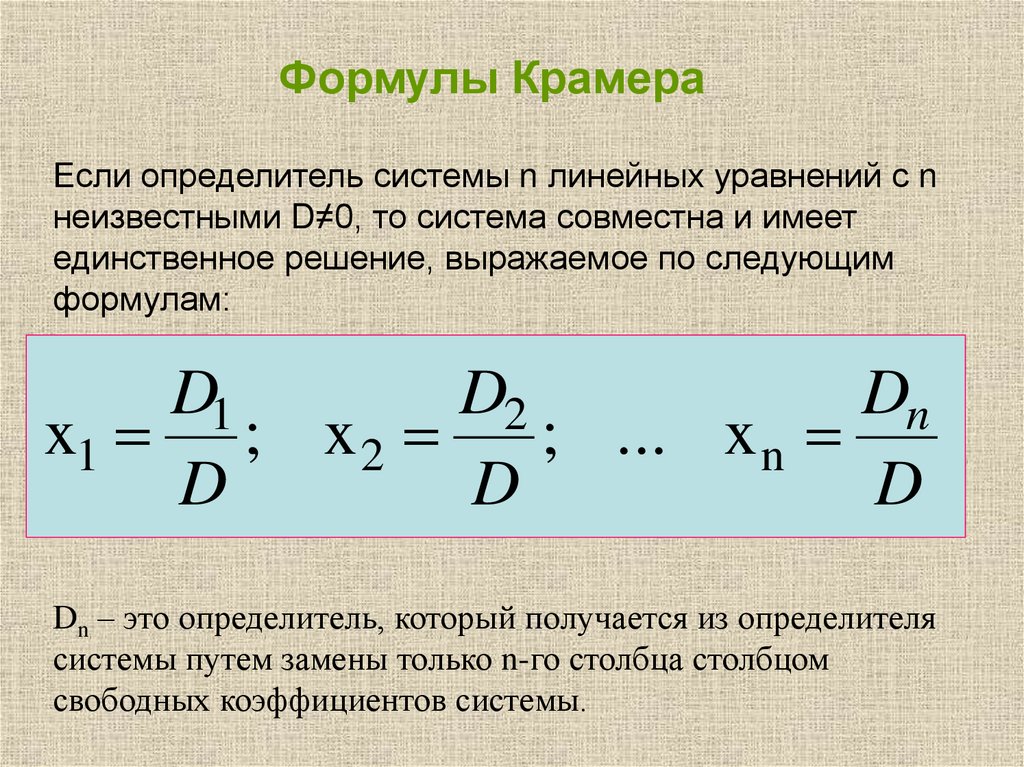
Формулы КрамераЕсли определитель системы n линейных уравнений с n
неизвестными D≠0, то система совместна и имеет
единственное решение, выражаемое по следующим
формулам:
D1
D2
Dn
x1 ; x 2
; ... x n
D
D
D
Dn – это определитель, который получается из определителя
системы путем замены только n-го столбца столбцом
свободных коэффициентов системы.
32. Алгоритм решения систем линейных уравнений по формулам Крамера
• 1. Составляем матрицы А, В, Х• 2. Вычисляем определитель матрицы А.
• 3. Составляем определитель 1 путем замены
первого столбца в матрице А на вектор-столбец
матрицы В
• 4.Вычисляем определитель 1 и находим первую
неизвестную по формуле:
1
x1
5. Составляем определитель 2 путем
замены второго столбца в матрице А на
вектор-столбец матрицы В
33.
6. Вычисляем определитель 2 и находим вторуюнеизвестную по формуле:
2
x2
определитель 3 путем замены
третьего столбца в матрице А на вектор-столбец
матрицы В
8. Вычисляем определитель 3 и находим третью
неизвестную по формуле:
7. Составляем
3
x3
34. Решение систем линейных уравнений методом Гаусса
• Одним из универсальных и эффективныхметодов решений линейных алгебраических
уравнений систем является метод Гаусса,
состоящий в последовательном исключении
неизвестных.
• Процесс решения по методу Гаусса состоит
из двух этапов. На первом этапе (прямой ход)
система приводится к ступенчатому
(треугольному) виду. На втором этапе
(обратный ход) идет последовательное
определение неизвестных из этой
ступенчатой системы.
35.
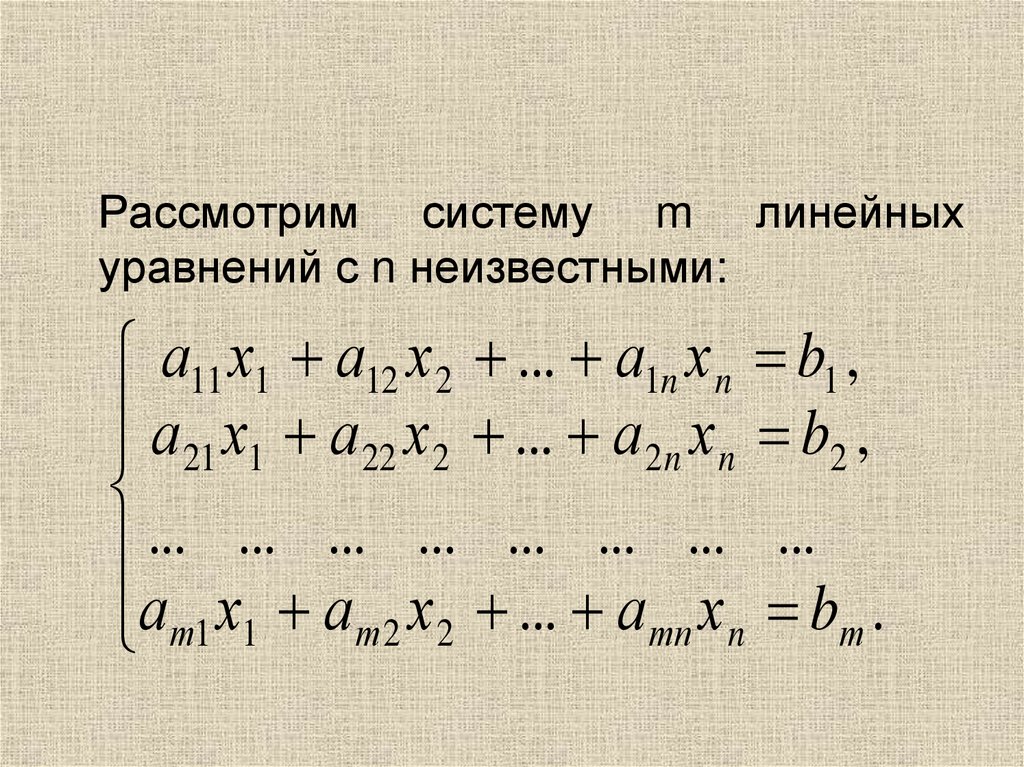
Рассмотрим систему m линейныхуравнений с n неизвестными:
а11 х1 а12 х 2 ... а1n х n b1 ,
а 21 х1 а 22 х 2 ... а 2 n х n b2 ,
...
...
...
...
...
...
...
...
а т1 х1 а т 2 х 2 ... а тn х n bт .
36.
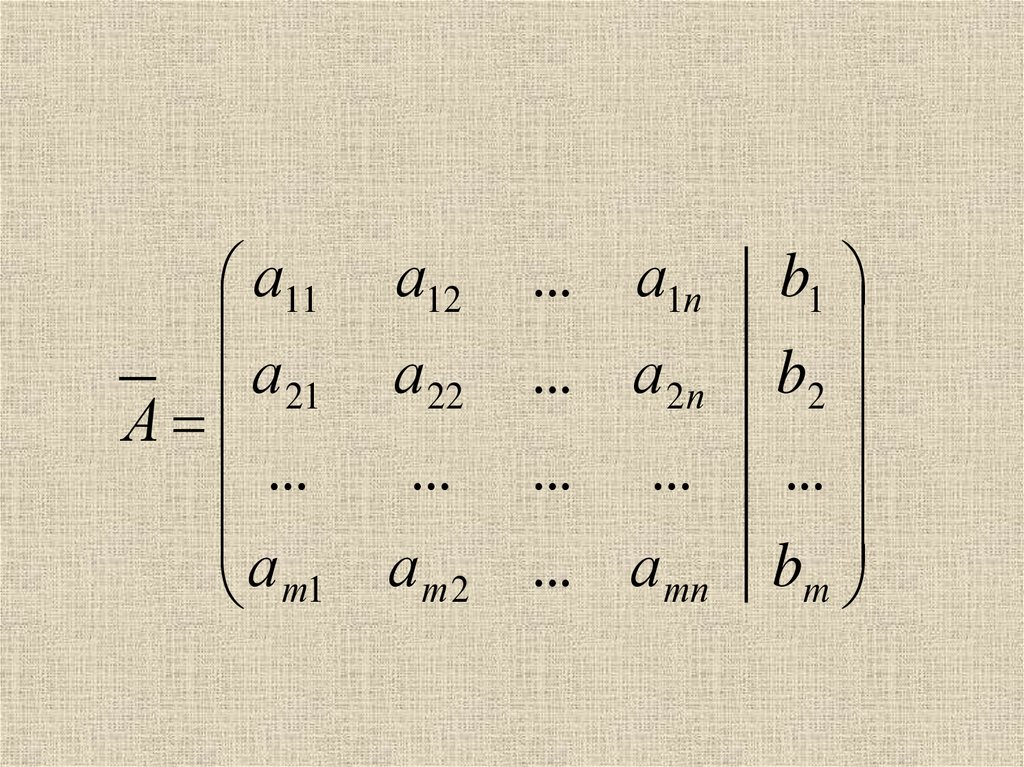
Назовем матрицей системы матрицу,составленную из коэффициентов при
неизвестных. Матрицу, полученную из А
добавлением столбца свободных
членов, называют расширенной
матрицей:
37.
а11 а12а 21 а 22
А
...
...
а
а
т
1
т2
... а1п
... а 2 п
...
...
... а mп
b1
b2
...
bm
38. Теорема Кронекера–Капелли
Для того чтобы система линейныхуравнений была совместной,
необходимо и достаточно, чтобы ранг
матрицы системы был равен рангу ее
расширенной матрицы, т.е.
r ( A) r ( A)
39.
Если ранг матрицы совместнойсистемы равен числу неизвестных, то
система имеет единственное решение,
если же ранг меньше числа
неизвестных, то система имеет
множество решений.
40.
Две системы, множества решенийкоторых совпадают, называются
эквивалентными или равносильными.
Преобразование, применение которого
превращает систему в новую
систему, эквивалентную исходной,
называется эквивалентным или
равносильным преобразованием.
41. Пример
Исследовать систему линейныхуравнений
х1 х2 3 х3 2 х4 3х5 1,
2 х 2 х 4 х х 3 х 2,
1
2
3
4
5
3
х
3
х
5
х
2
х
3
х
1
,
1
2
3
4
5
2 х1 2 х2 8 х3 3 х4 9 х5 2.
42.
Составим расширеннуюматрицу системы и с помощью
элементарных преобразований
вычислим одновременно ранги
обеих матриц.
43. Метод Гаусса
Для того чтобы решить системууравнений методом Гаусса
выписывают расширенную матрицу
этой системы и над строками этой
матрицы производят элементарные
преобразования, приводя ее к виду,
когда ниже главной диагонали,
содержащей элементы
a11, a22 , , amm ,
будут располагаться нули.
44.
Разрешается:1) изменять порядок строк матрицы, что
соответствует изменению порядка
уравнений;
2) умножать строки на любые отличные от
нуля числа, что соответствует умножению
соответствующих уравнений на эти числа;
3) прибавлять к любой строке матрицы другую,
умноженную на отличное от нуля число, что
соответствует прибавлению к одному
уравнению системы другого, умноженного на
число.
45.
С помощью этих преобразованийкаждый раз получается расширенная
матрица новой системы, равносильной
исходной, т. е. такой системы, решение
которой совпадает с решением
исходной системы
46.
• Установить совместность и решитьсистему
2 x1 3x2 11 x3 5 x4 2,
x1 x2 5 x3 2 x4 1,
2 x1 x2 3x3 2 x4 3,
x1 x2 3x3 4 x4 3.
47.
Выпишем расширенную матрицусистемы и поменяем местами первую и
вторую строки для того, чтобы элемент
равнялся единице (так удобнее
производить преобразования матрицы).
48. Прямой ход
21
A
2
1
3 11 5 2 1
1 5 2 1 2
1 3 2 3 2
1 3 4 3 1
1 5 2 1 1
3 11 5 2 0
1 3 2 3 0
1 3 4 3 1
2 1
1 1 1 0
1 7 2 5
1 3 4 3
1
5
49.
10
0
0
2 1 1
1 1 1 0 0
1 7 2 5 0
0 2 2 4 0
1
5
1
0
0
0
2 1 1
1 1 1 0 0
0 6 1 5 0
0 2 2 4 0
1 5
2 1 1
1 1 1 0 0
0 2 2 4 0
0 0 7 7 0
1
5
1 5 2 1
1 1 1 0
0 2 2 4
0 6 1 5
2 1
1 1 1 0
0 1 1 2
0 0 1 1
1 5
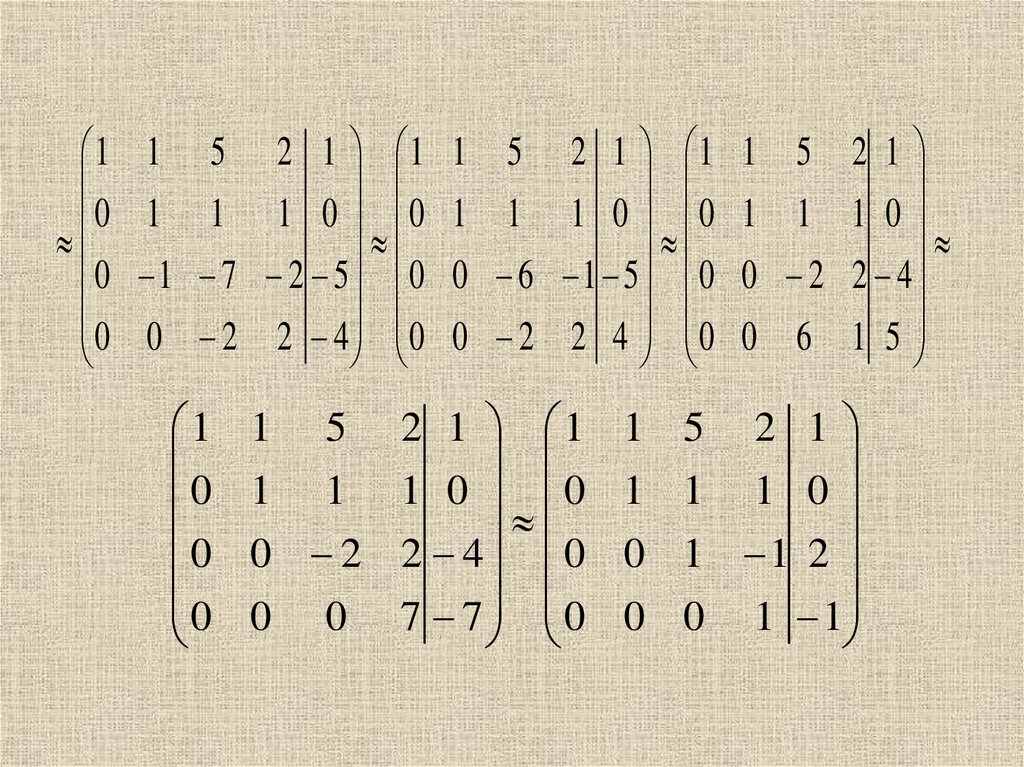
50. Обратный ход
Ранги матрицы системы и еерасширенной матрицы совпали с
числом неизвестных. Согласно теореме
Кронекера-Капелли система уравнений
совместна и решение ее единственно.
Выпишем систему уравнений,
расширенную матрицу которой мы
получили в результате преобразований:
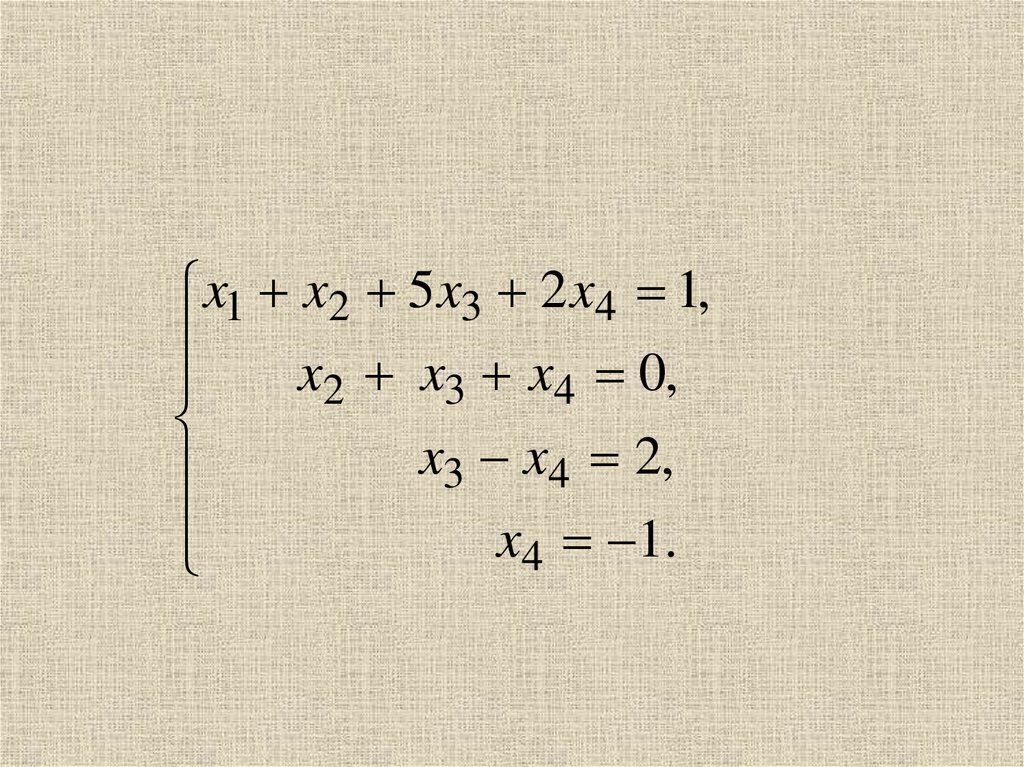
51.
x1 x2 5 x3 2 x4 1,x2 x3 x4 0,
x3 x4 2,
x4 1.
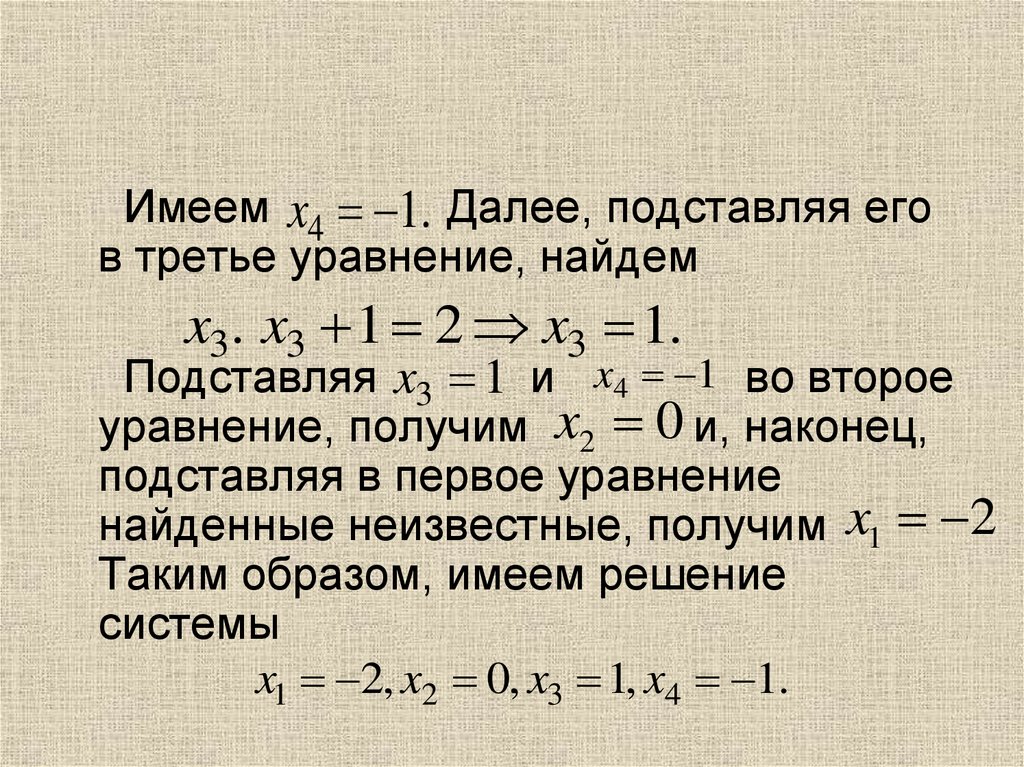
52.
Имеем x4 1. Далее, подставляя егов третье уравнение, найдем
x3. x3 1 2 x3 1.
Подставляя x3 1 и x4 1 во второе
уравнение, получим x2 0 и, наконец,
подставляя в первое уравнение
найденные неизвестные, получим x1 2
Таким образом, имеем решение
системы
x1 2, x2 0, x3 1, x4 1.
53. Общее решение системы линейных уравнений
Если ранг матрицы равен r , то любойотличный от нуля минор порядка
этой матрицы называется базисным.
r
54. Пример
Решить систему уравнений2 x1 x2 x3 3x4 2,
4 x1 x3 7 x4 3,
2
x
3
x
x
1
,
2
3
4
2 x1 3x2 4 x3 2 x4 3.
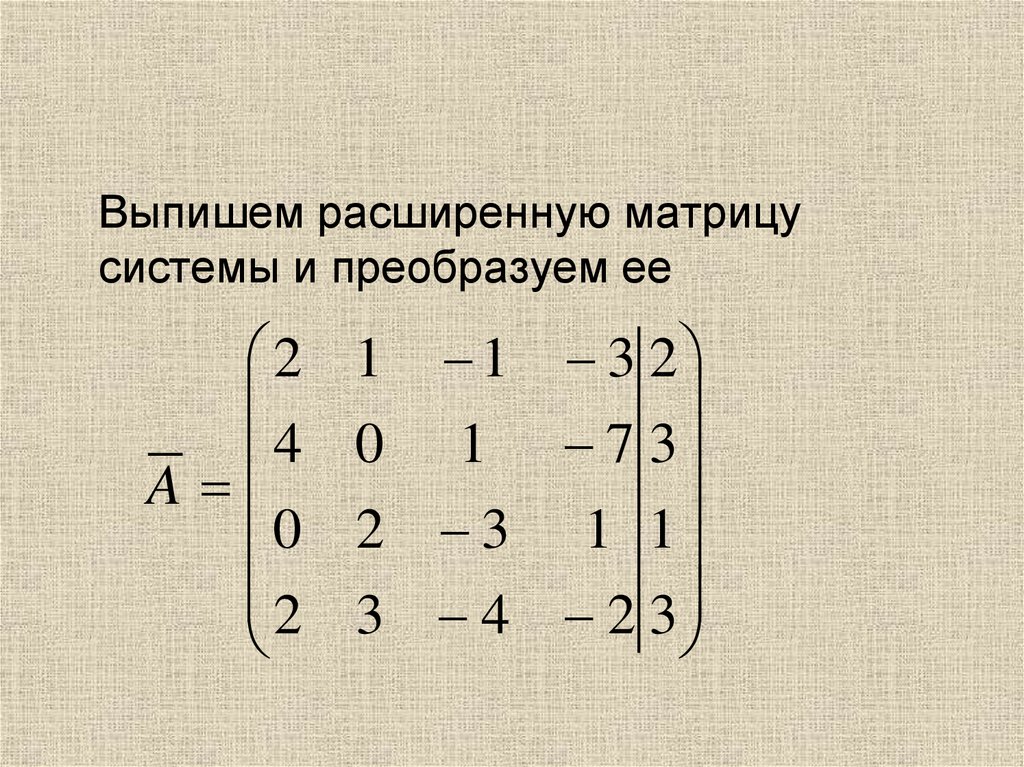
55.
Выпишем расширенную матрицусистемы и преобразуем ее
2
4
A
0
2
1 3 2
0 1 7 3
2 3 1 1
3 4 2 3
1
56. Однородные системы
a11x1 a12 x2 ... a1n xn 0,a x a x ... a x 0,
21 1
22 2
2n n
..........
..........
..........
..........
.....
am1 x1 am 2 x2 ... amn xn 0.
57. Теорема о совместности однородной системы
Для того чтобы однородная системалинейных уравнений имела
нетривиальное решение, необходимо и
достаточно, чтобы ранг матрицы этой
системы был меньше числа
неизвестных n.
58.
При r<n система являетсянеопределенной, т.е. имеет
бесчисленное множество решений, в
том числе и нетривиальное.
Если m=n, т.е. число уравнений
совпадает с числом неизвестных,
матрица системы является квадратной.
условие r<n в этом случае означает, что
определитель системы, т.е. det А=0, что
следует из определения ранга матрицы.
59. Пример
x1 2 x2 4 x3 3 x4 0,3 x 5 x 6 x 4 x 0,
1
2
3
4
4 x1 5 x2 2 x3 3 x4 0,
3 x1 8 x2 24 х3 19 x4 0.
60.
Составим матрицу системы1
3
A
4
3
3
5 6 4
5 2 3
8 24 19
2
4
и методом элементарных
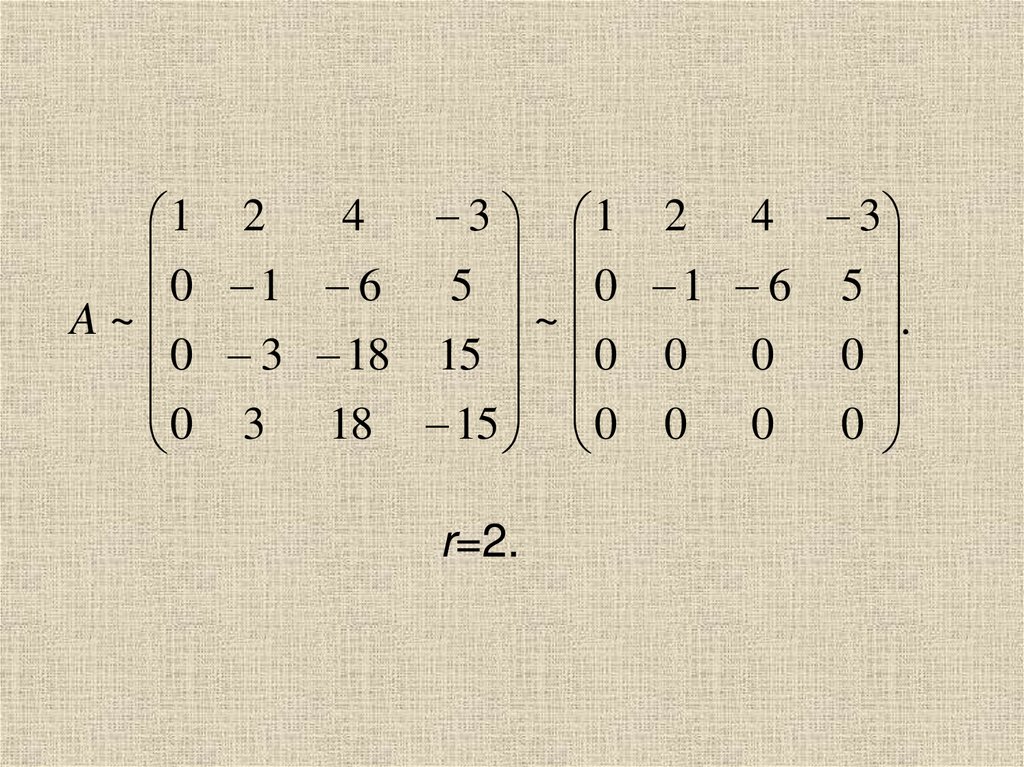
преобразований найдем ее ранг.
61.
43 1 2 4 3
1 2
0 1 6 5 0 1 6 5
A~
~
.
0 3 18 15
0 0 0 0
0 3 18 15 0 0 0 0
r=2.
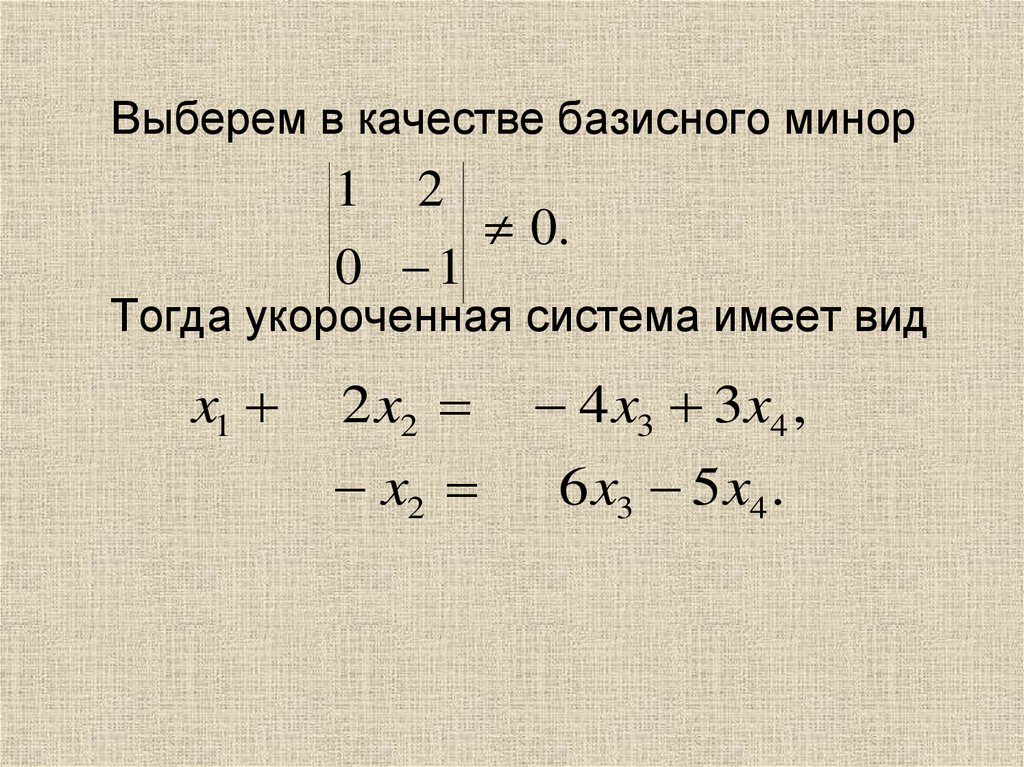
62.
Выберем в качестве базисного минор1
2
0 1
0.
Тогда укороченная система имеет вид
x1
2 x2
4 x3 3x4 ,
x2
6 x3 5 x4 .
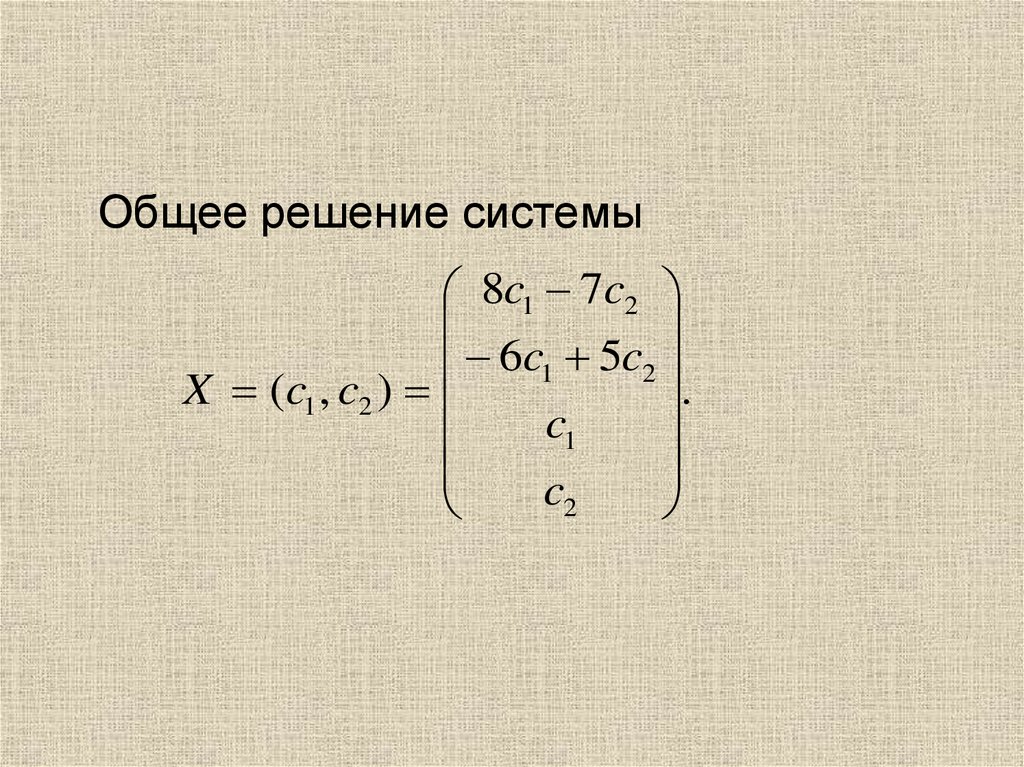
63.
Общее решение системы8c1 7c2
6c1 5c2
X (c1 , c2 )
.
c1
c
2
64. Фундаментальная система решений
Назовем фундаментальной системойрешений систему матриц-столбцов,
полученную из общего решения при
условии, что свободным неизвестным
дают последовательно значения
с1 1, c2 c3 ... cn 0,
с1 0, c2 1, c3 ... cn 0,
.............................................
с1 c2 c3 ... 0, cn 1.
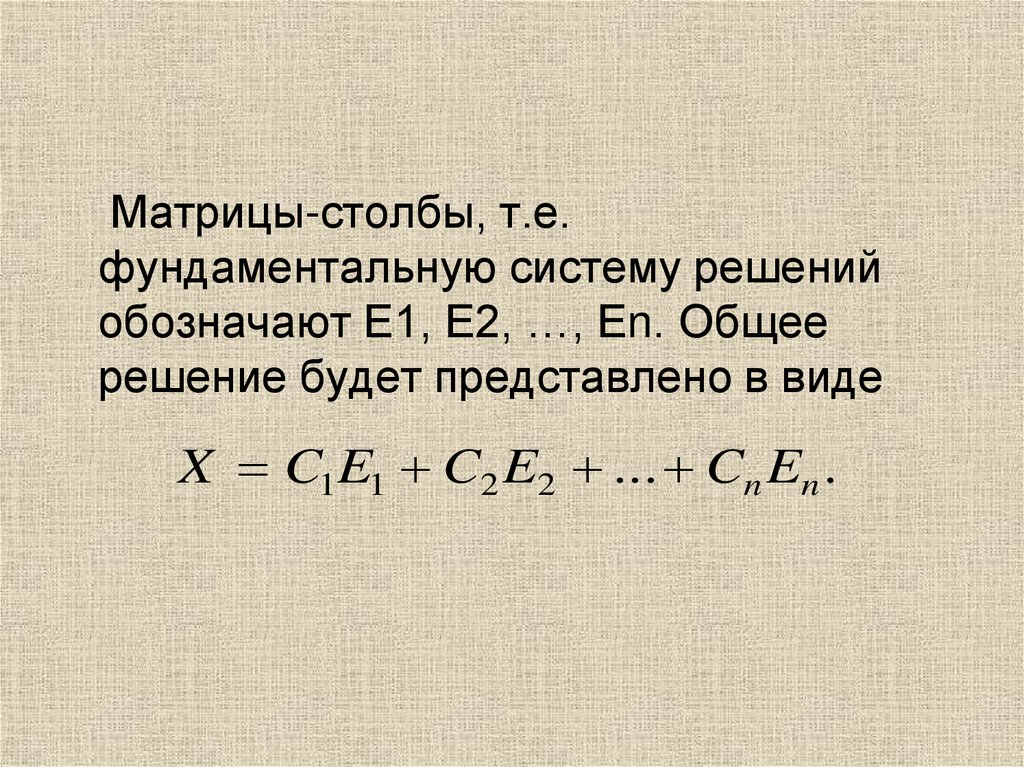
65.
Матрицы-столбы, т.е.фундаментальную систему решений
обозначают Е1, Е2, …, Еn. Общее
решение будет представлено в виде
X C1E1 C2 E2 ... Cn En .
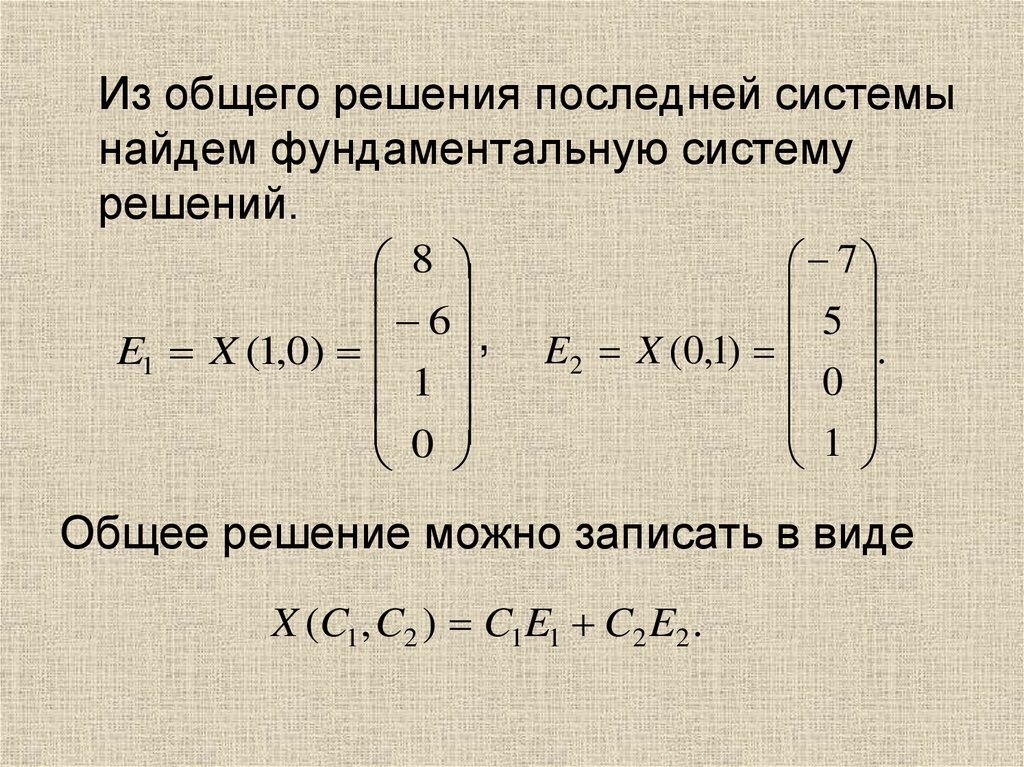
66.
Из общего решения последней системынайдем фундаментальную систему
решений.
8
6 ,
E1 X (1,0)
1
0
7
5
E2 X (0,1) .
0
1
Общее решение можно записать в виде
X (C1 , C2 ) C1E1 C2 E2 .
67. Решение систем линейных уравнений методом Гаусса
• Одним из универсальных и эффективныхметодов решений линейных алгебраических
уравнений систем является метод Гаусса,
состоящий в последовательном исключении
неизвестных.
• Процесс решения по методу Гаусса состоит
из двух этапов. На первом этапе (прямой ход)
система приводится к ступенчатому
(треугольному) виду. На втором этапе
(обратный ход) идет последовательное
определение неизвестных из этой
ступенчатой системы.
68.
• Система уравнений называется совместной, еслиона имеет хотя бы одно решение, и несовместной,
если она не имеет ни одного решения.
• Совместная система называется определенной,
если она имеет единственное решение, и
неопределенной, если она имеет более одного
решения. Предыдущей пример демонстрирует
совместную определенную систему линейных
уравнений.
• Если система неопределенная каждое ее решение
называется частным решением системы.
Совокупность всех частных решений называется
общим решением.
• Решить систему – это значит выяснить, совместна
она или несовместна. Если система совместна, найти
ее общее решение.
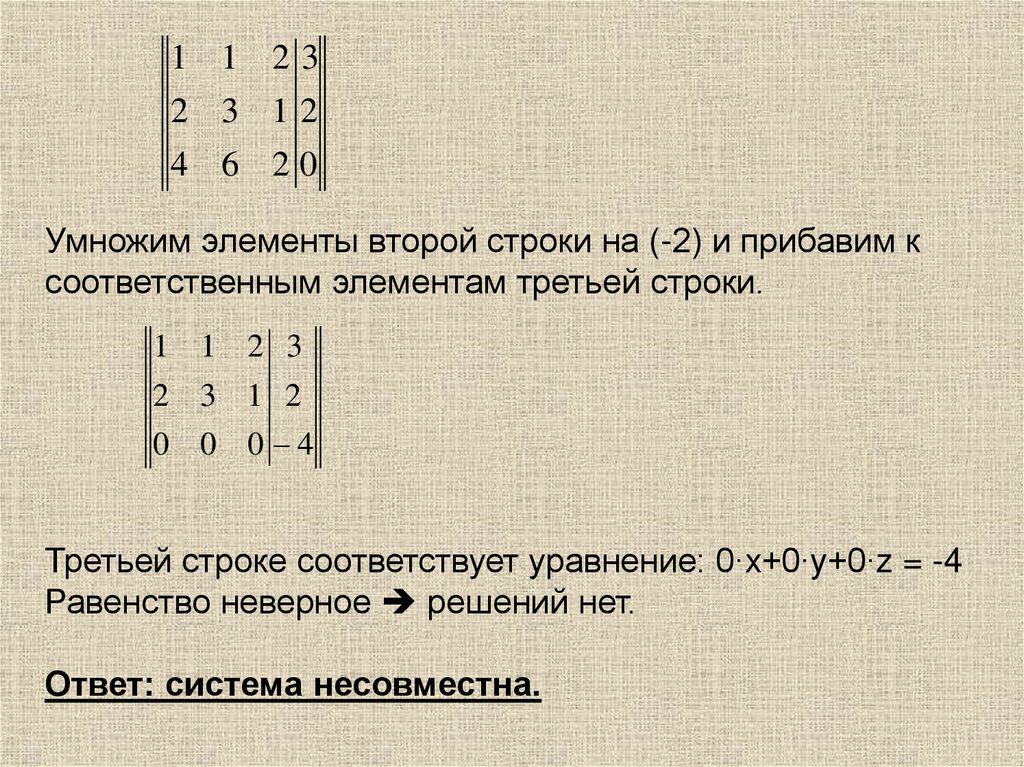
69. Решить систему (несовместную) методом Гаусса
2x 3y z 2x y 2z 3
4x 6y 2z 0
2 3 12
A' 1 1 2 3
4 6 20
Переставим местами первую и вторую строки
70.
1 1 232 3 12
4 6 20
Умножим элементы второй строки на (-2) и прибавим к
соответственным элементам третьей строки.
1 1 2 3
2 3 1 2
0 0 0 4
Третьей строке соответствует уравнение: 0∙x+0∙y+0∙z = -4
Равенство неверное решений нет.
Ответ: система несовместна.