


 Физика
ФизикаПохожие презентации:
")
")
")
. Лекция 5")



")

")
Режимы работы и эксплуатации электростанций. Лекция 5. Название
1.
РЕЖИМЫ РАБОТЫ И ЭКСПЛУАТАЦИИЭЛЕКТРОСТАНЦИЙ
Лекция 5. НАЗВАНИЕ
2.
■ Нагрузка зависит от частоты, уменьшение Рн приводит к увеличению fиз-за появления положительного ускоряющего момента на генераторах и
наоборот.
■ Регулирующий эффект нагрузки. При увеличении f увеличивается и
потребляемая мощность, что заставляет ротор снижать обороты. Так
продолжается до наступления установившегося режима. При изменении
одного из параметров рабочая точка перемещается в следующую точку
баланса и т.д.
TJэкв
dS E
PTэкв
Peэкв
dt
Peэкв РНуст Рпот
Peэкв РНуст
РНуст (t0 ) РНуст (0) PH 2
3.
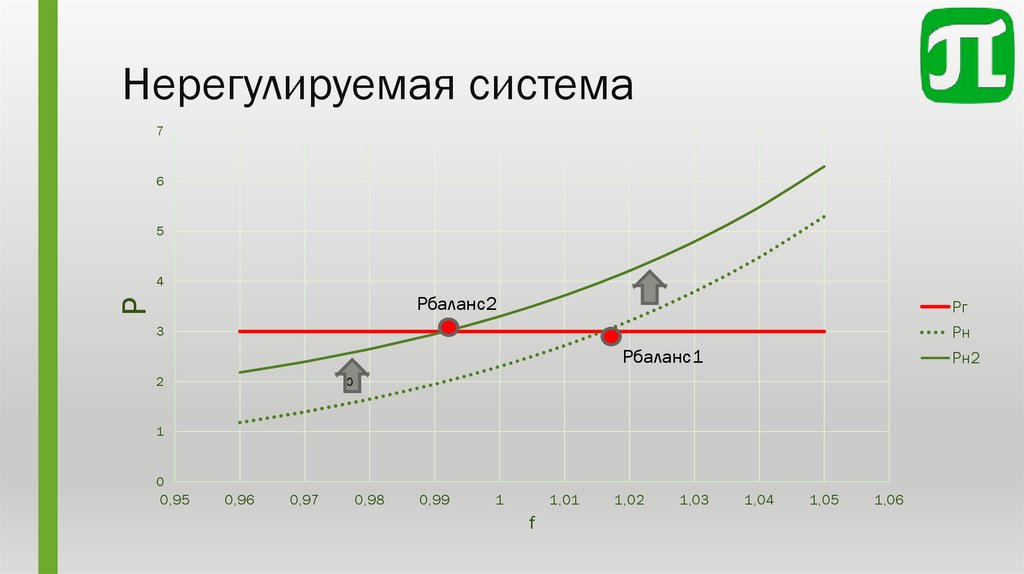
Нерегулируемая система6
5
4
Р
Pбаланс1
Pг
Рн
Pг2
3
2
Pбаланс2
1
0
0,95
0,96
0,97
0,98
0,99
1
1,01
f
1,02
1,03
1,04
1,05
1,06
4.
Нерегулируемая система7
6
5
4
Р
Pбаланс2
Pг
Рн
3
Pбаланс1
2
Pн2
С
1
0
0,95
0,96
0,97
0,98
0,99
1
1,01
f
1,02
1,03
1,04
1,05
1,06
5.
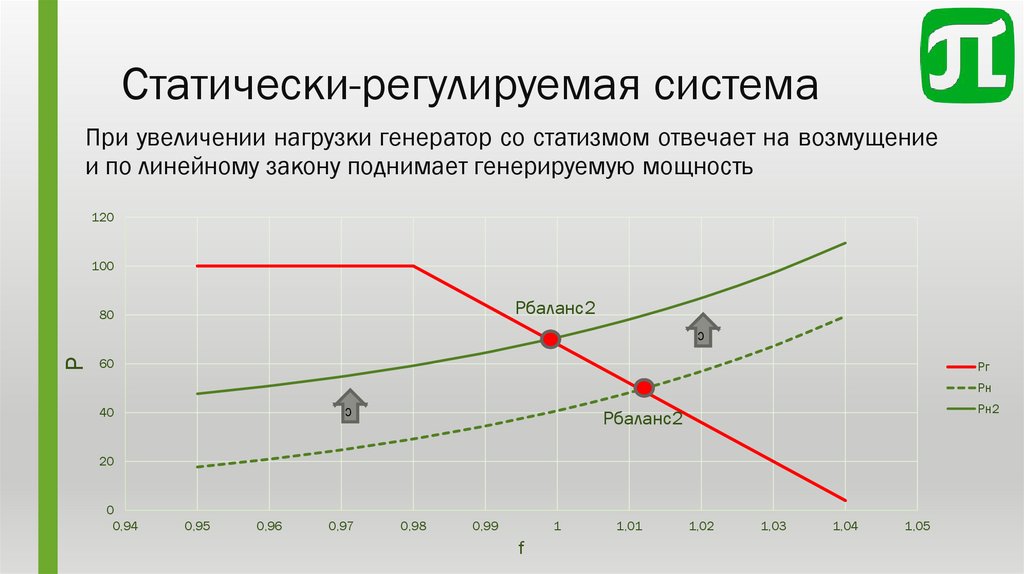
Статически-регулируемая системаПри увеличении нагрузки генератор со статизмом отвечает на возмущение
и по линейному закону поднимает генерируемую мощность
120
100
Pбаланс2
80
Pг
Рн
40
С
Р
С
60
Pн2
Pбаланс2
20
0
0,94
0,95
0,96
0,97
0,98
0,99
1
f
1,01
1,02
1,03
1,04
1,05
6.
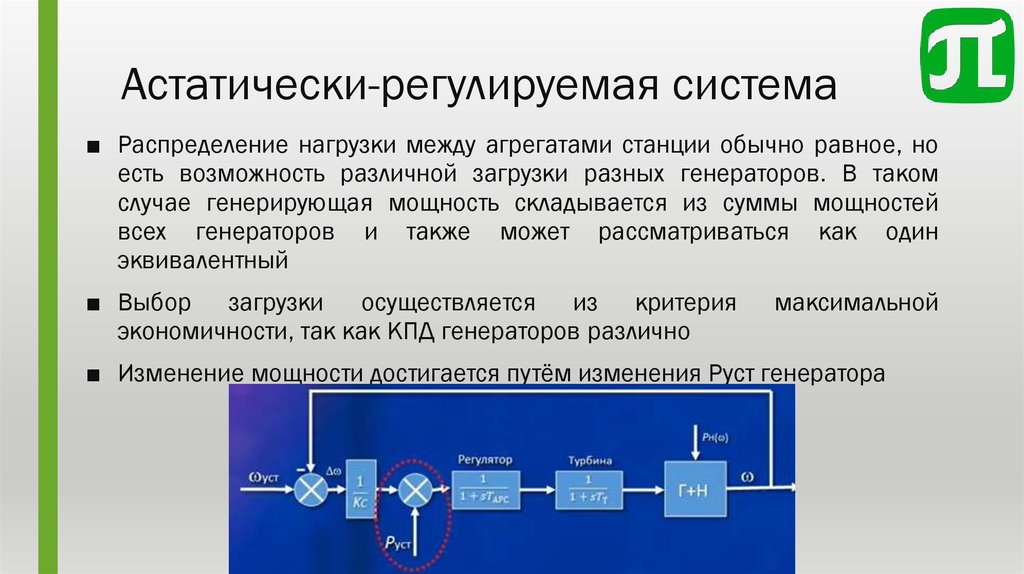
Астатически-регулируемая система■ Распределение нагрузки между агрегатами станции обычно равное, но
есть возможность различной загрузки разных генераторов. В таком
случае генерирующая мощность складывается из суммы мощностей
всех генераторов и также может рассматриваться как один
эквивалентный
■ Выбор загрузки осуществляется из критерия
экономичности, так как КПД генераторов различно
максимальной
■ Изменение мощности достигается путём изменения Руст генератора
7.
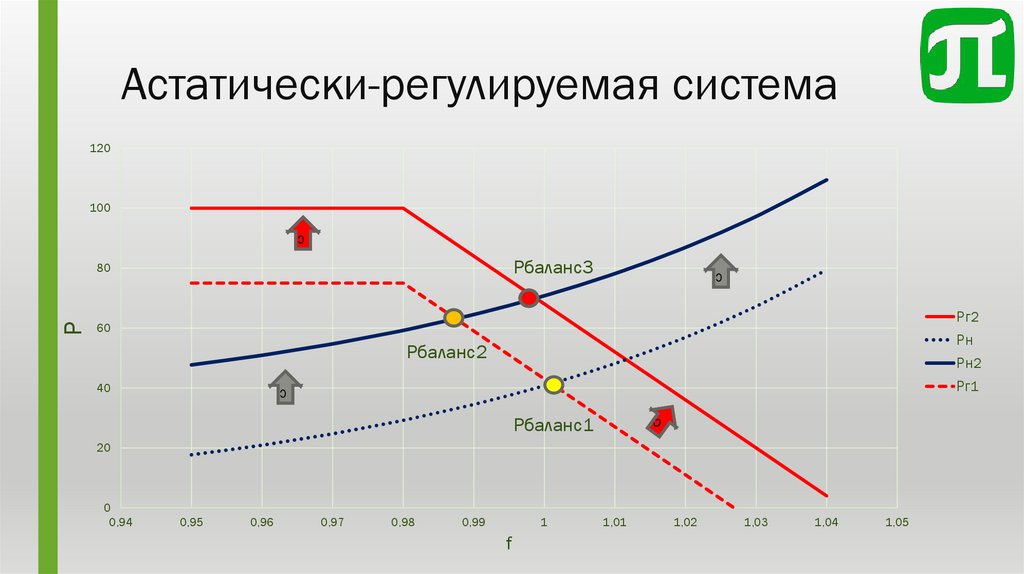
Астатически-регулируемая система120
100
С
Pбаланс3
Pг2
60
Рн
Pбаланс2
40
Pн2
Рг1
С
Р
С
80
Pбаланс1
20
0
0,94
0,95
0,96
0,97
0,98
0,99
1
f
1,01
1,02
1,03
1,04
1,05
8.
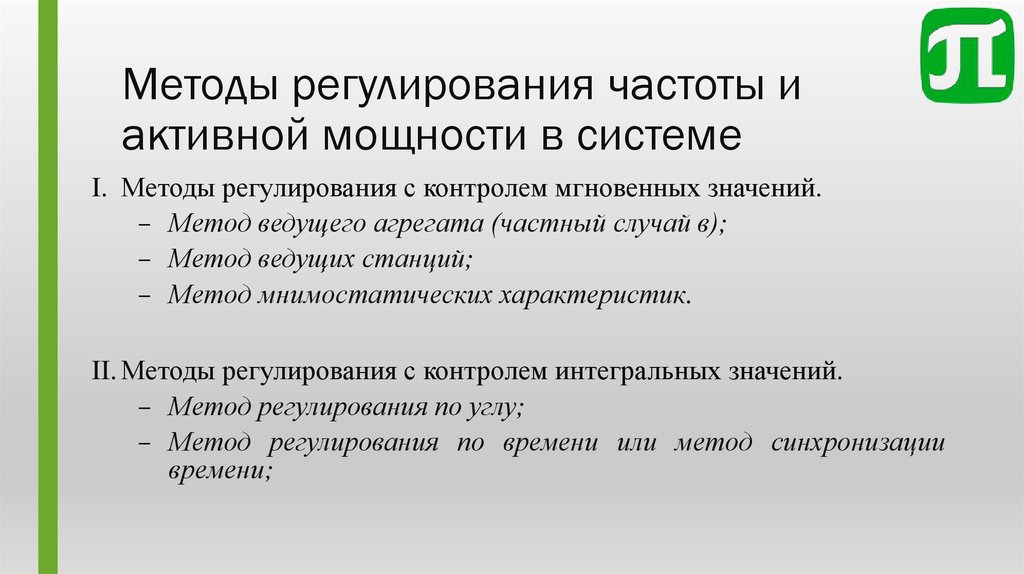
Методы регулирования частоты иактивной мощности в системе
I. Методы регулирования с контролем мгновенных значений.
– Метод ведущего агрегата (частный случай в);
– Метод ведущих станций;
– Метод мнимостатических характеристик.
II. Методы регулирования с контролем интегральных значений.
– Метод регулирования по углу;
– Метод регулирования по времени или метод синхронизации
времени;
9.
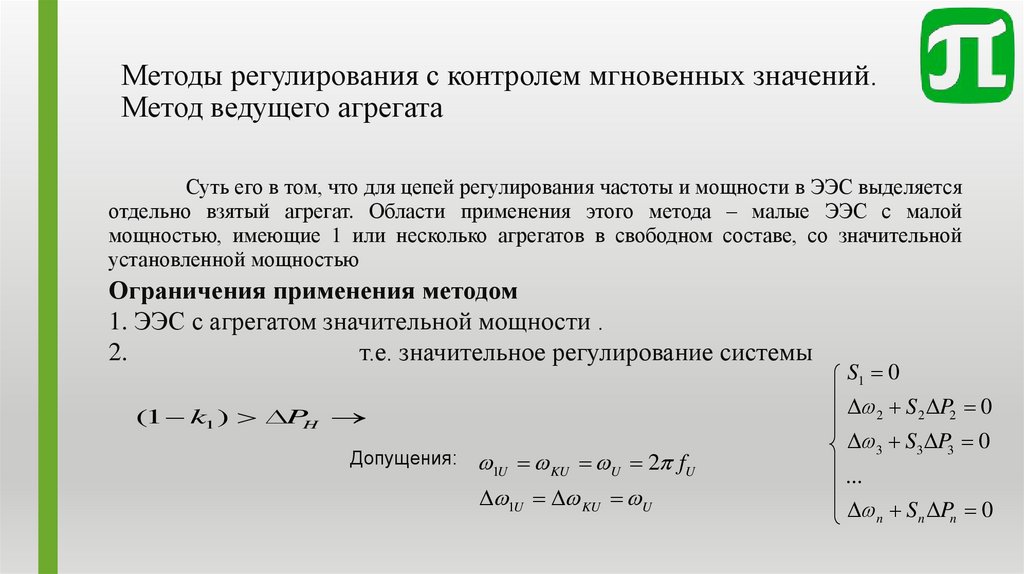
Методы регулирования с контролем мгновенных значений.Метод ведущего агрегата
Суть его в том, что для цепей регулирования частоты и мощности в ЭЭС выделяется
отдельно взятый агрегат. Области применения этого метода – малые ЭЭС с малой
мощностью, имеющие 1 или несколько агрегатов в свободном составе, со значительной
установленной мощностью
Ограничения применения методом
1. ЭЭС с агрегатом значительной мощности .
2.
т.е. значительное регулирование системы
2 S 2 P2 0
(1 k1 ) PH
Допущения:
S1 0
1U KU U 2 fU
1U KU U
3 S3 P3 0
...
n S n Pn 0
10.
Методы регулирования с контролеммгновенных значений. Метод ведущей станции
■ Его суть в том, что для цепей регулирования частоты и активной мощности выделяют
несколько агрегатов на отдельно взятой станции. Минимальное число агрегатов = 2,
максимальное = все агрегаты станции.
■ Основная проблема – распределение нагрузки между астатическими агрегатами. Данная
система нуждается в дополнительных законах регулирования, определяющими долевое
участие в покрытии небаланса мощности в ЭЭС между агрегатами, осуществляющими
регулирование. Наиболее простой принцип регулирования – регулирование по
линейному закону.
■ В общем случае закон линейного управления: ax + b = 0
■ Есть станции с агрегатами, которые работают на разном виде топлива. Под
экономической целесообразностью таких станций понимают получение максимальной
эффективности использования отдельно взятого агрегата. Тогда в качестве основного
критерия используют критерий минимизации затрат при производстве электрической
энергии (т.е. минимизация пережогов топлива). В последнем случае, когда на станции
агрегаты, выполняющие регулирование частоты и активной мощности, работают в
одинаковых условиях.
11.
Методы регулирования с контролеммгновенных значений. Метод ведущей станции
■ Описанный выше закон второго регулирования реализуется в средствах группового
регулирования частоты и активной мощности. Эти устройства называют групповыми
регуляторами активной мощности, т.е. ГРАМ. Есть ГРНРМ – групповые регуляторы
напряжения и реактивной мощности.
■ Этот метод наиболее распространен в виду относительной простоты и применимости
показателей качества регулирования частоты и активной мощности в ЭЭС.
■ Основные преимущества:
– точные показания частоты и удовлетворение всех требований ГОСТ (т.е.
0, 2 );
– простота – помимо регуляторов скорости установлена ГРАМ;
– затухание колебаний также обеспечивается (в России в большой ЭЭС подавляют
колебания за 1-2 мин. в стационарном режиме при набросе нагрузки).
12.
Методы регулирования с контролеммгновенных значений. Метод ведущей станции
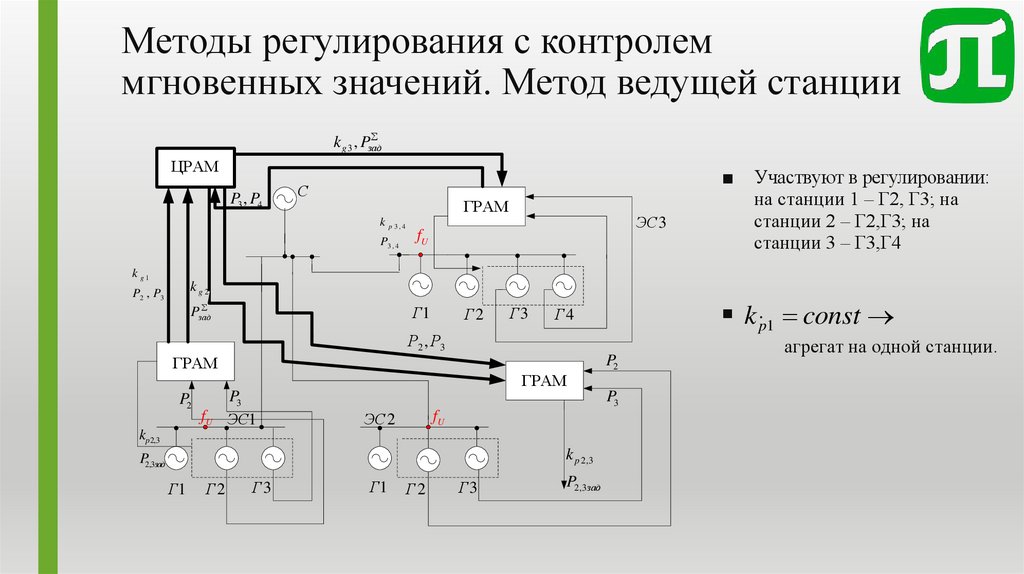
k g 3 , Pзад
ЦРАМ
P3 , P4
■
С
ГРАМ
k p 3,4
P3 , 4
k g1
ЭС 3
fU
Участвуют в регулировании:
на станции 1 – Г2, Г3; на
станции 2 – Г2,Г3; на
станции 3 – Г3,Г4
kg2
P2 , P3
Pзад
Г1
Г2
Г3
■
Г4
Р2 , Р3
ГРАМ
P2
fU
ГРАМ
P3
ЭС1
P3
fU
ЭС 2
kp2,3
k p 2,3
P2,3зад
Г1
Г2
Г3
P2
Г1
Г2
Г3
P2,3 зад
k p. 1 const
агрегат на одной станции.
13.
Методы регулирования с контролеммгновенных значений. Метод ведущей станции
Недостатки
■ Реализация систем автоматического регулирования частоты и активной
мощности (САР) с применением метода ведущей станции является не
оптимальной, т.е. не удовлетворяет требованиям, которые предъявляются
к оптимальным системам управления. В частности в этом методе нет
учета условий работы конкретной станции, не учитывается экономическая
целесообразность участия в покрытии небаланса мощности.
■ Электростанции различного типа.
■ Этот недостаток учитывается в следующем методе.
14.
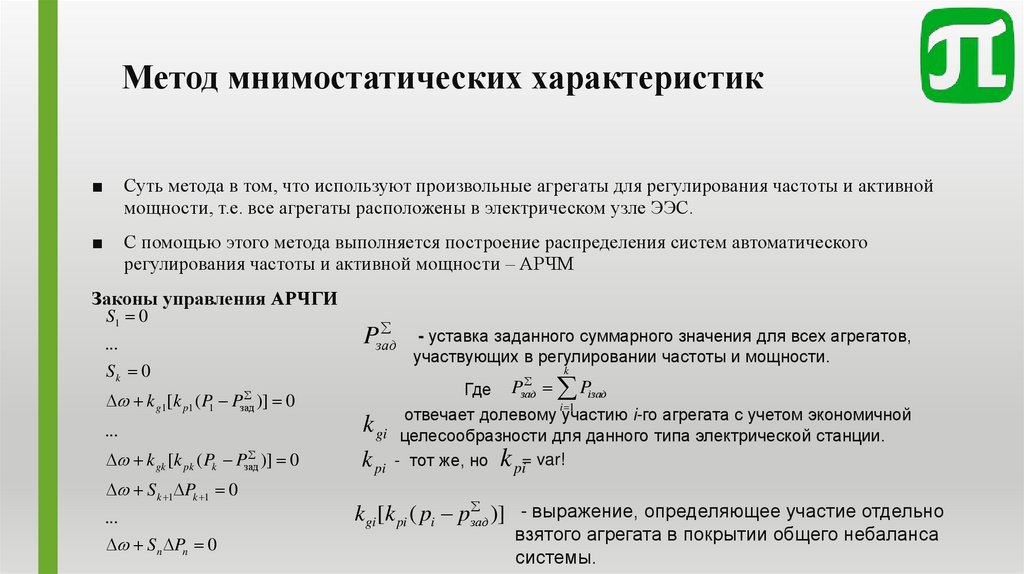
Метод мнимостатических характеристик■
Суть метода в том, что используют произвольные агрегаты для регулирования частоты и активной
мощности, т.е. все агрегаты расположены в электрическом узле ЭЭС.
■
С помощью этого метода выполняется построение распределения систем автоматического
регулирования частоты и активной мощности – АРЧМ
Законы управления АРЧГИ
S1 0
...
Sk 0
k g1[k p1 ( P1 Pзад
)] 0
...
k gk [k pk ( Pk Pзад
)] 0
S k 1 Pk 1 0
...
S n Pn 0
Pзад
- уставка заданного суммарного значения для всех агрегатов,
участвующих в регулировании частоты и мощности.
Где
зад
P
k
Piзад
i 1
отвечает долевому участию i-го агрегата с учетом экономичной
k gi целесообразности
для данного типа электрической станции.
k pi - тот же, но k pi= var!
kgi [k pi ( pi pзад
)] - выражение, определяющее участие отдельно
взятого агрегата в покрытии общего небаланса
системы.
15.
Метод мнимостатическиххарактеристик
■
Структура АРЧМ на базе этого метода.
См. рис. выше с черным цветом. ЦРАМ – центральный регулятор активной kмощности (изменение ).
pi
Принцип построения такой системы называют централизованным САР. В этом случае АРЧМ, выполненный
на базе метода мнимостатических характеристик, называют централизованной системой управления
частоты и мощности.
■
Преимущество метода:
Возможность построения оптимальной системы управления частоты и мощности (не полностью
оптимальной, т.к. не учитываются U и Q).
■
Недостаток метода:
Относительная сложность, определяющая наличием центрального регулирования (мощный промышленный
компьютер) и наличие каналов связи.
В России построение такой системы мало эффективно, т.к. отсутствуют канал связи или наличие канала
связи с неудовлетворительными характеристиками по быстродействию. В этих случаях используют каналы
телемеханики. Грозовой провод вплетали оптоволокно, но оптоволокно не рассчитывается на низкие
температуры, теперь не используют
16.
17.
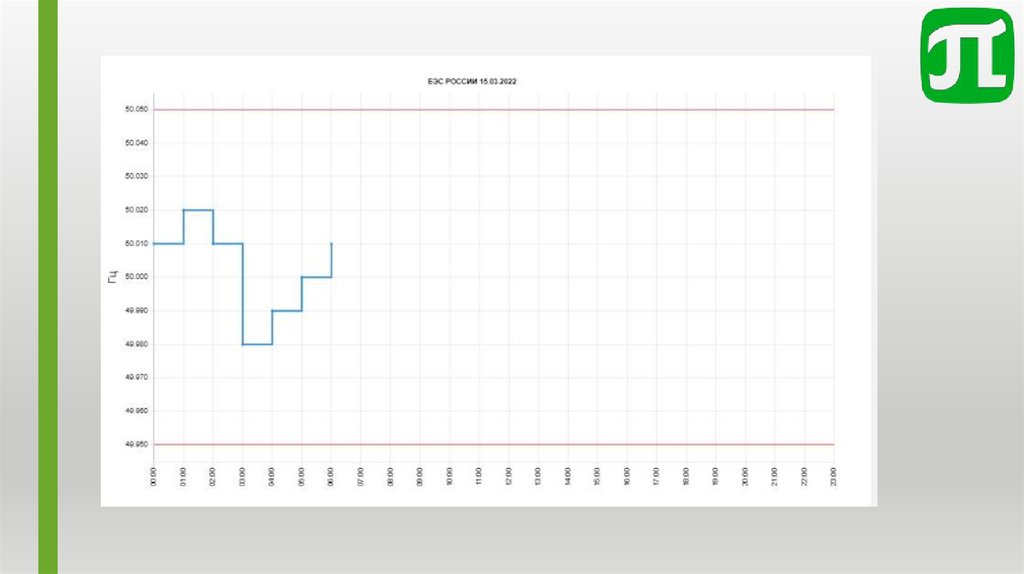
ГОСТ и его интерпретация18.
Первичное, вторичное и третичноерегулирование
■ Под первичным регулятором понимают процесс регулирования частоты и
активной мощности с привлечением только первичных регуляторов.
АРСТ (автоматический регулятор скорости турбины)
В результате можно сделать вывод, что для организации системы
регулирования частоты и активной мощности средствами первичного
регулирования необходимо обладать значительным запасом по диапазону
регулирования и в конечном счете значительной установленной мощностью
агрегата
■ Под вторичным регулированием принято понимать процессы
регулирования частоты и активной мощности с привлечением вторичных
регуляторов, в которых реализуются дополнительные законы
регулирования частоты, активной мощности и межсистемных перетоков
19.
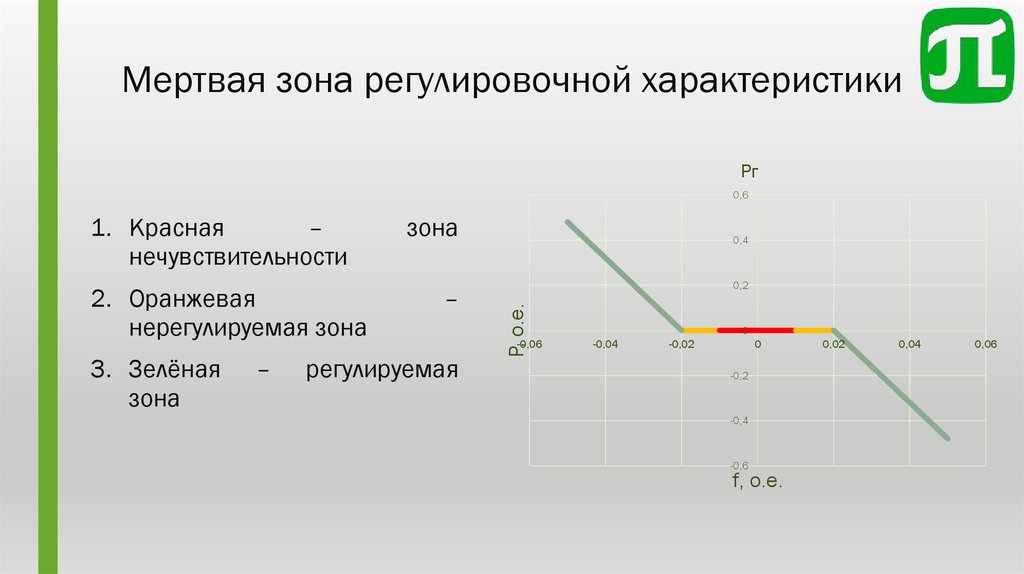
Мертвая зона регулировочной характеристикиРг
0,6
2. Оранжевая
нерегулируемая зона
3. Зелёная
зона
–
зона
–
регулируемая
0,4
0,2
Р, о.е.
1. Красная
–
нечувствительности
-0,06
0
-0,04
-0,02
0
-0,2
-0,4
-0,6
f, о.е.
0,02
0,04
0,06