













































































 Физика
Физика Электроника
ЭлектроникаПохожие презентации:



")

")




Теория автоматического управления. Современная ТАУ. (Часть 2)
1.
2.
Учебный курс«Теория Автоматического Управления»
Современная ТАУ
• Описание одномерных и многомерных объектов и систем в пространстве
состояний
• Связь матрично-векторной и вход-выходной моделей объектов и систем
• Понятия управляемости и наблюдаемости
• Понятие базиса в пространстве состояний
• Основные формы представления математических моделей
• Наблюдатели состояний
Далее
3.
Современная ТАУ• Системы с обратной связью по состоянию
• Управление и наблюдение в многомерных системах. Разделяющее
преобразование.
• Закономерности движения
• Оценка устойчивости состояния автоматических систем
• Оценка устойчивости замкнутых систем с использованием функции
Ляпунова
• Математическое описание и исследование дискретно-непрерывных
систем управления.
4.
Описание одномерных и многомерных объектов и системв пространстве состояний
• Основные понятия и определения
• Математическое описание в пространстве состояний
5.
Связь матрично-векторной и вход-выходной моделей объектов исистем
• Построение МВ ММ по вход-выходной модели
• Построение МВ ММ по структурной схеме
• Построение вход-выходных моделей по матрично-векторным
• Техника вычисления передаточных матриц
6.
Понятия управляемости и наблюдаемости• Понятие управляемости
• Понятие наблюдаемости и полноты
• Понятие стабилизируемости, детектируемости и идентифицируемости
7.
Понятия базиса в пространстве состояний• Основные понятия и определения
• Общие закономерности преобразования МВ ММ к
произвольно выбранному базису
8.
Наблюдатели состояний• Основные понятия и определения
• Редуцированный наблюдатель
9.
Системы с обратной связью по состояниям• Основные понятия и определения
• Модальное управление одномерными объектами
• Модальное управление многомерными объектами
10.
Управление и наблюдение в многомерных системах.Разделяющее преобразование.
• Многомерный ДНС Луенбергера. Преобразования, разделяющиеся
по наблюдениям.
• Преобразование, разделяющееся по наблюдению
• Преобразование, разделяющееся по управлению
• Возможности систем обратных связей для многовходовых объектов.
Примеры построения многовходовых объектов
11.
Закономерности движения• Понятия возмущенного и невозмущенного движений
• Свободное движение
• Вынужденное движение
12.
Оценка устойчивости состояния автоматических систем• Понятие устойчивости в пространстве состояний
• Оценка устойчивости по Ляпунову
• Оценка устойчивости по переходной матрице
• Оценка устойчивости по спектру линейной системной
матрицы
13.
Оценка устойчивости замкнутых систем с использованиемфункции Ляпунова
• Основные понятия и определения
• Построение функции Ляпунова на основе матрично-векторной
модели.
• Теорема Ляпунова для линейных систем
• Оценка качества переходных процессов
14.
Математическое описание и исследование дискретнонепрерывных систем управления• Основные понятия и определения
• Переходные уравнения состояния ДНС
• Вычисление переходной матрицы состояния ДНСУ
• Эквивалентные преобразования матрично-векторных моделей
линейных ДНСУ
• Оценка фундаментальных свойств ДНСУ
• Математические модели процессов в ДНСУ
15.
Описание одномерных и многомерных объектови систем в пространстве состояний
Основные понятия и определения.
Переменные состояния – это некоторые внутренние переменные
объекта или системы, характеризующие ее динамические свойства.
X x1 x2 x3 xn T
Описание в пространстве состояний –
это
представление
математической
модели объекта или системы с
использованием переменных состояния.
16.
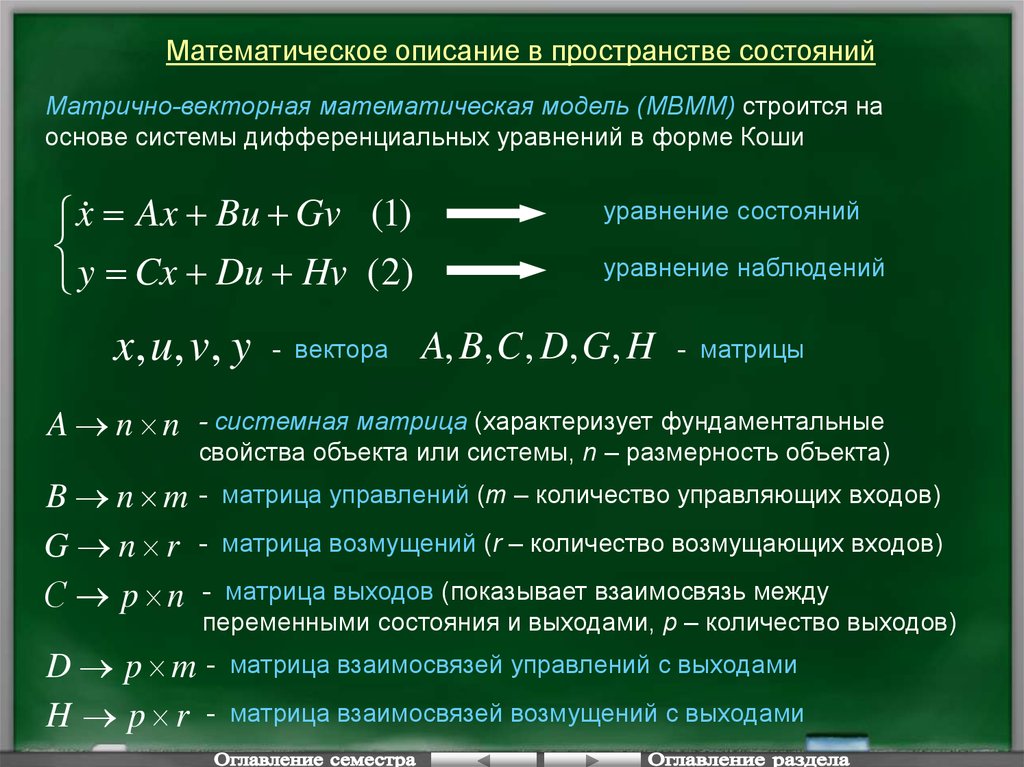
Математическое описание в пространстве состоянийМатрично-векторная математическая модель (МВММ) строится на
основе системы дифференциальных уравнений в форме Коши
x Ax Bu Gv (1)
y Cx Du Hv ( 2)
x , u, v, y
A n n
- вектора
уравнение состояний
уравнение наблюдений
A, B, C , D, G , H
- матрицы
- системная матрица (характеризует фундаментальные
свойства объекта или системы, n – размерность объекта)
B n m - матрица управлений (m – количество управляющих входов)
G n r - матрица возмущений (r – количество возмущающих входов)
С p n - матрица выходов (показывает взаимосвязь между
переменными состояния и выходами, p – количество выходов)
D p m H p r -
матрица взаимосвязей управлений с выходами
матрица взаимосвязей возмущений с выходами
17.
Связь матрично-векторной и вход-выходноймоделей объектов и систем
Построение МВ ММ по вход-выходной модели
В зависимости от соотношения степеней полиномов числителя и
знаменателя передаточной функции возможны 3 случая перехода:
m 0
W ( p)
k
an p an 1 p
n
n 1
... a1 p a0
K / an
Y ( p)
n
*
n 1
*
* U ( p)
p an 1 p ... a1 p a0
(p
n
an* 1 p n 1 ... a1* p a0* )Y ( p )
ai*
ai
an
K
U ( p)
an
После применения обратного преобразования Лапласа
18.
y(n)
an* 1 y ( n 1)
... a2* y ( 2 )
a1* y (1)
a0* y
K
U
an
x1 x 2
x 3 ... x n
y x1
1
0 ... 0
x 1 0
x 1 0
0
0
1 ... 0
x 1 x2
x 2 0
x
2
A
B
..........
..........
..........
.........
..
x 2 x3
.. ...
..............
x n - a *0 - a1* - a *2 ... - a *n
x n k/a n
x K U a * x a * x a * x ... a * x
0 1
1 2
2 3
n 1 n
n an
x1 x2 ... xn
C 1 0
... 0
19.
Дан объект управленияПример
10
Y ( p)
W ( p) 3
2
5 p 15 p 20 p 10 U ( p )
Необходимо построить МВ ММ
(5 p 3 15 p 2 20 p 10)Y ( p ) 10U ( p )
( p 3 3 p 2 4 p 2)Y ( p ) 2U ( p )
y
( 3)
3y
( 2)
4y
(1)
2 y 2u
y x1
0 1 0
x x
0 0 1
A
1
2
- 2 - 4 - 3
x 2 x3
x 3 2u 2 x1 4 x2 3x3
0
B 0
2
С=[1 0 0]
x Ax Bu
y Cx
20.
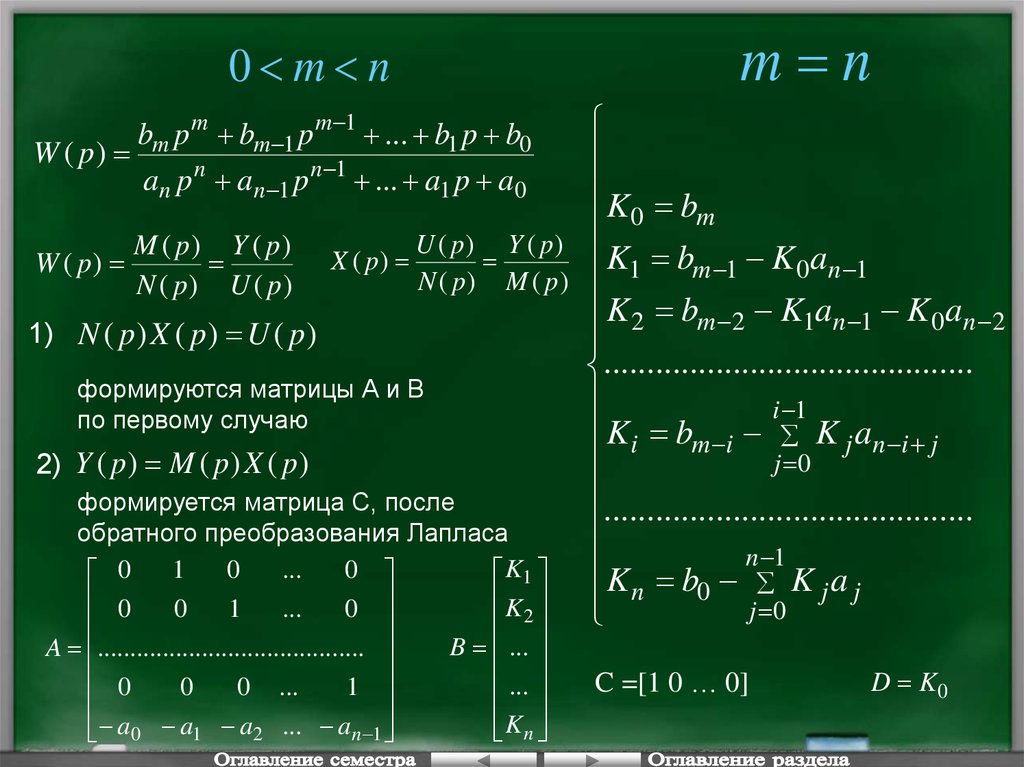
m n0 m n
bm p m bm 1 p m 1 ... b1 p b0
W ( p)
an p n an 1 p n 1 ... a1 p a0
W ( p)
M ( p) Y ( p)
N ( p) U ( p)
X ( p)
U ( p) Y ( p)
N ( p) M ( p)
1) N ( p ) X ( p ) U ( p )
формируются матрицы А и В
по первому случаю
2) Y ( p ) M ( p ) X ( p )
формируется матрица С, после
обратного преобразования Лапласа
1
0
...
0
K1
0
K
0
0
1
...
0
2
B ...
A .........................................
...
0
0
0 ...
1
K n
a0 a1 a2 ... an 1
K b
m
0
K1 bm 1 K 0an 1
K b
m 2 K1an 1 K 0 an 2
2
...........................................
i 1
K i bm i K j an i j
j 0
...........................................
n 1
K n b0 K j a j
j 0
C =[1 0 … 0]
D K0
21.
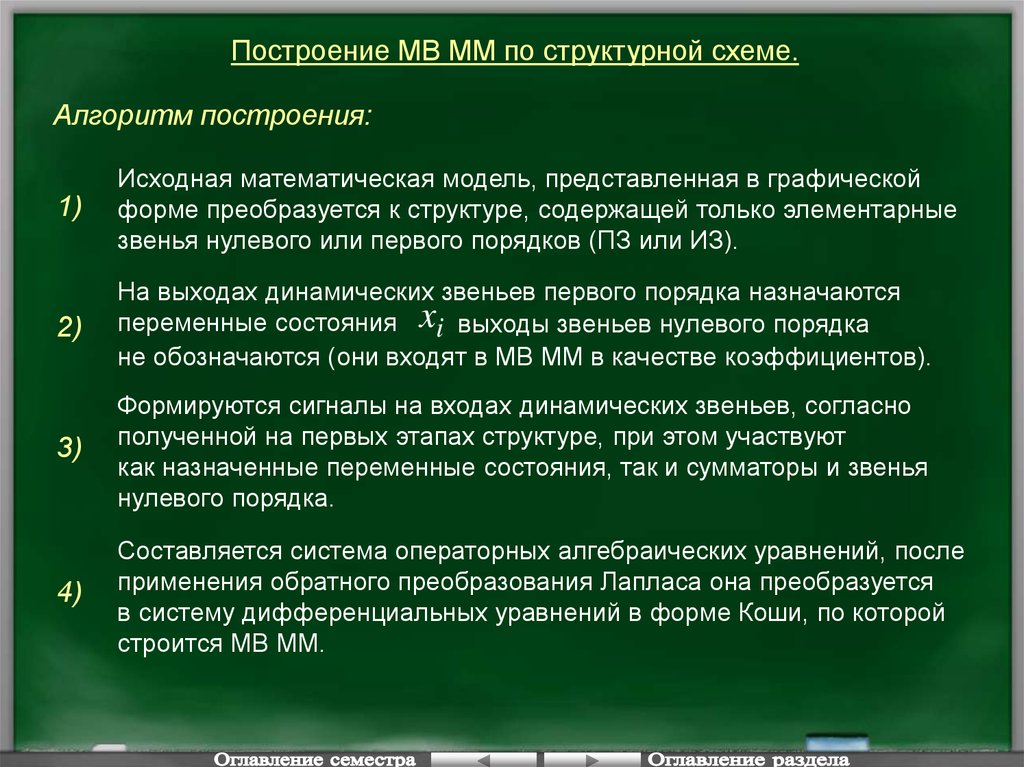
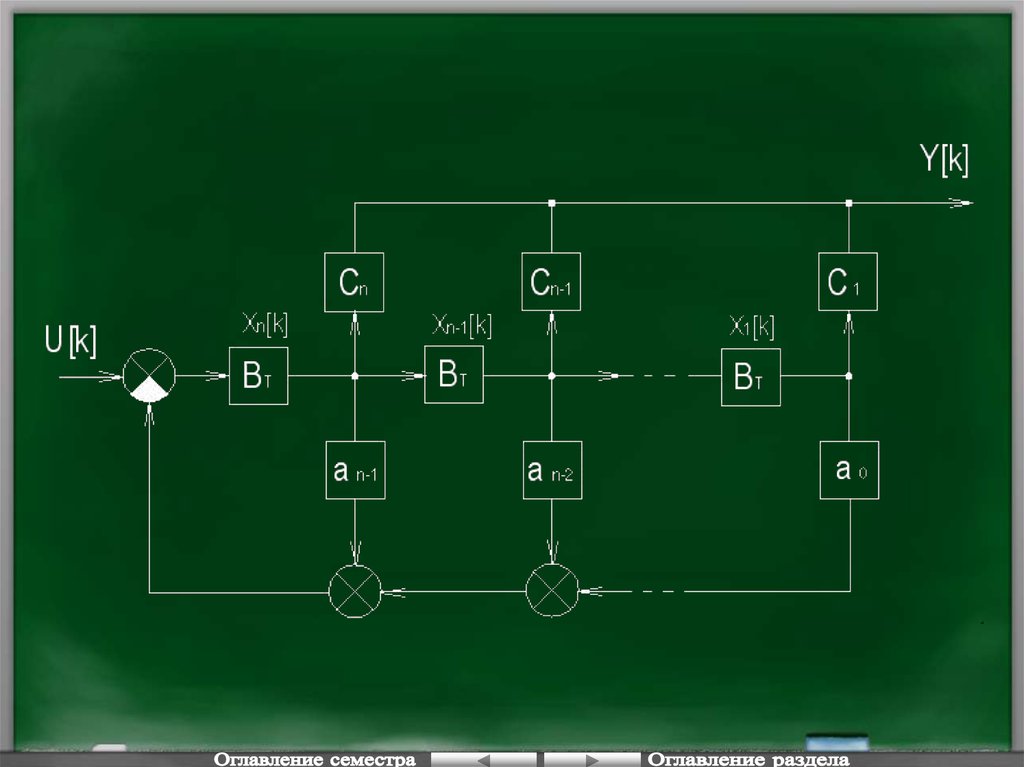
Построение МВ ММ по структурной схеме.Алгоритм построения:
1)
Исходная математическая модель, представленная в графической
форме преобразуется к структуре, содержащей только элементарные
звенья нулевого или первого порядков (ПЗ или ИЗ).
2)
На выходах динамических звеньев первого порядка назначаются
переменные состояния xi выходы звеньев нулевого порядка
не обозначаются (они входят в МВ ММ в качестве коэффициентов).
3)
Формируются сигналы на входах динамических звеньев, согласно
полученной на первых этапах структуре, при этом участвуют
как назначенные переменные состояния, так и сумматоры и звенья
нулевого порядка.
4)
Составляется система операторных алгебраических уравнений, после
применения обратного преобразования Лапласа она преобразуется
в систему дифференциальных уравнений в форме Коши, по которой
строится МВ ММ.
22.
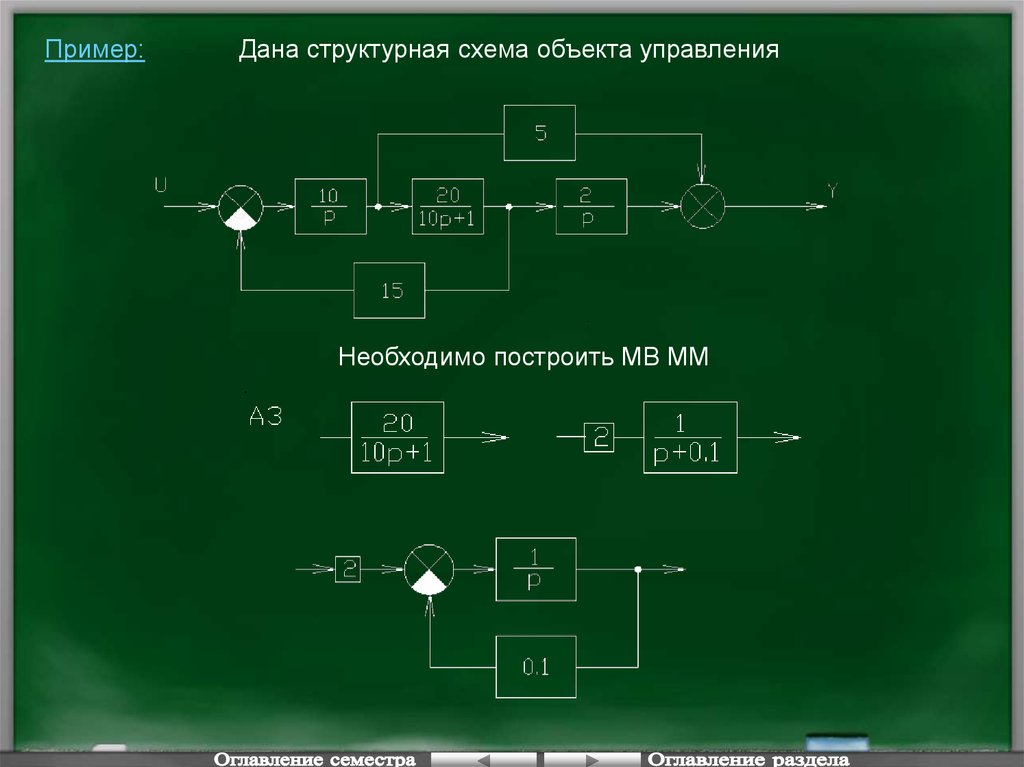
Пример:Дана структурная схема объекта управления
Необходимо построить МВ ММ
23.
px1 10(U 15 x2 )px 0,1x 2 x
2
2
1
px3 2 x2
y 5 x1 x3
0
A 2
0
- 150
- 0,1
2
0
0
0
x Ax Bu
y Cx
10
B 0
0
C 5 0 1
24.
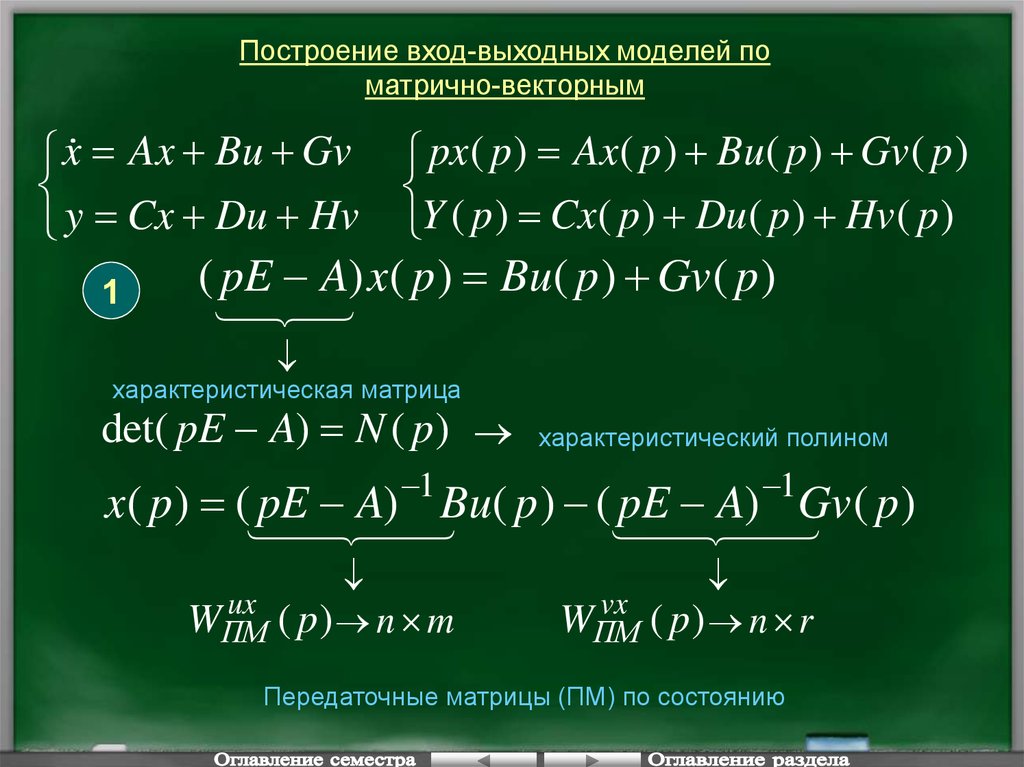
Построение вход-выходных моделей поматрично-векторным
x Ax Bu Gv
y Cx Du Hv
1
px ( p ) Ax( p ) Bu( p ) Gv ( p )
Y ( p ) Cx ( p ) Du ( p ) Hv ( p )
( pE A) x ( p ) Bu( p ) Gv ( p )
характеристическая матрица
det( pE A) N ( p )
характеристический полином
1
1
x ( p ) (
pE
A
)
Bu
(
p
)
(
pE
A
)
Gv
(
p
)
ux
WПМ
( p) n m
vx
WПМ
( p) n r
Передаточные матрицы (ПМ) по состоянию
25.
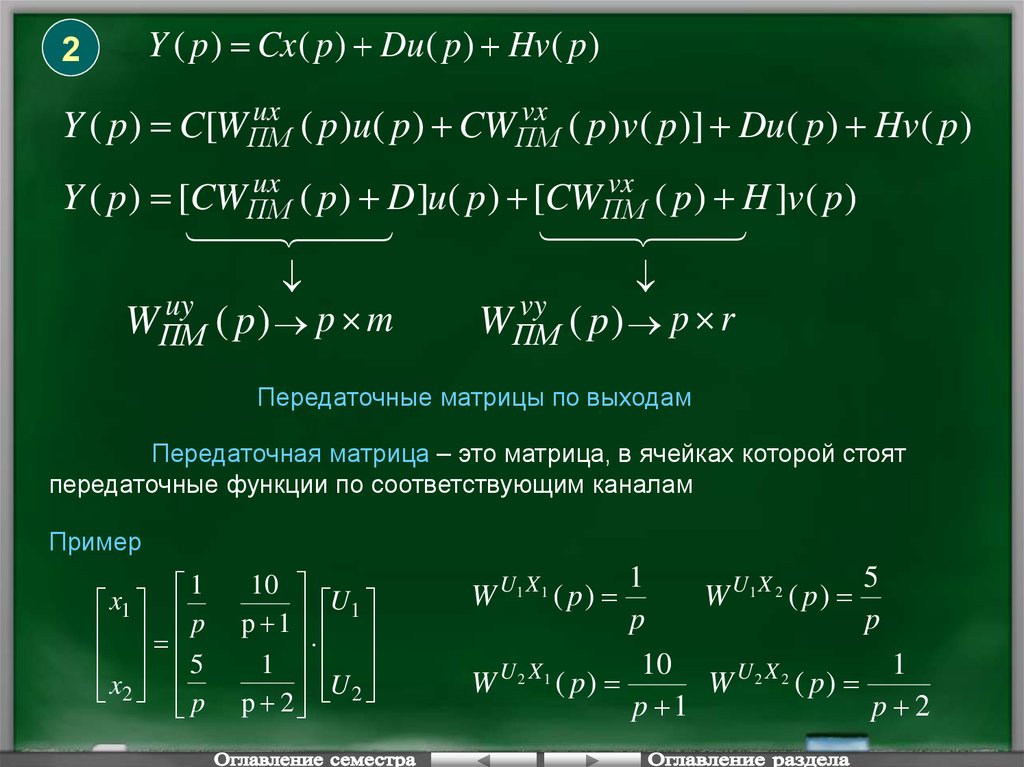
Y ( p ) Cx ( p ) Du ( p ) Hv ( p )2
ux
vx
Y ( p ) C[WПМ
( p )u( p ) CWПМ
( p )v ( p )] Du ( p ) Hv ( p )
ux
vx
Y ( p ) [CWПМ
( p ) D ]u( p ) [CWПМ
( p ) H ]v ( p )
uy
WПМ
( p) p m
vy
WПМ
( p) p r
Передаточные матрицы по выходам
Передаточная матрица – это матрица, в ячейках которой стоят
передаточные функции по соответствующим каналам
Пример
1
x1
p
5
x2 p
10
U1
p 1
1
U
p 2 2
1
5
W U1 X 2 ( p )
p
p
10
1
W U2 X1 ( p)
W U2 X 2 ( p)
p 1
p 2
W U1 X 1 ( p )
26.
Техника вычисления передаточных матрицОсновной задачей при построении передаточных матриц является
нахождение обратной характеристической матрицы и определителя.
В случае высокой размерности объекта это может представлять особые
трудности, поэтому для построения передаточной матрицы использую
специальные алгоритмы.
Самым распространенным является алгоритм Леверье-Фадеева.
n 1
n 2
M
(
p
)
p
E
p
M n 2 ... M 0
( pE A) N ( p ) M ( p )
an 1 M n 1 an E N ( p ) p n an 1 p n 1 ... a0
1
1
An 1 AM n 1 an 1 sp ( An 1 ) M n 2 An 1 an 1E
1
An 2 AM n 2 an 2 sp ( An 2 ) M n 3 An 2 an 2 E
2
1
a
sp ( An i ) M n (i 1) An i an i E
An i AM n i n i
i
1
sp ( A0 ) M 1 0 проверочный шаг
A0 AM 0 a0
n 1
sp ( ) - след матрицы
27.
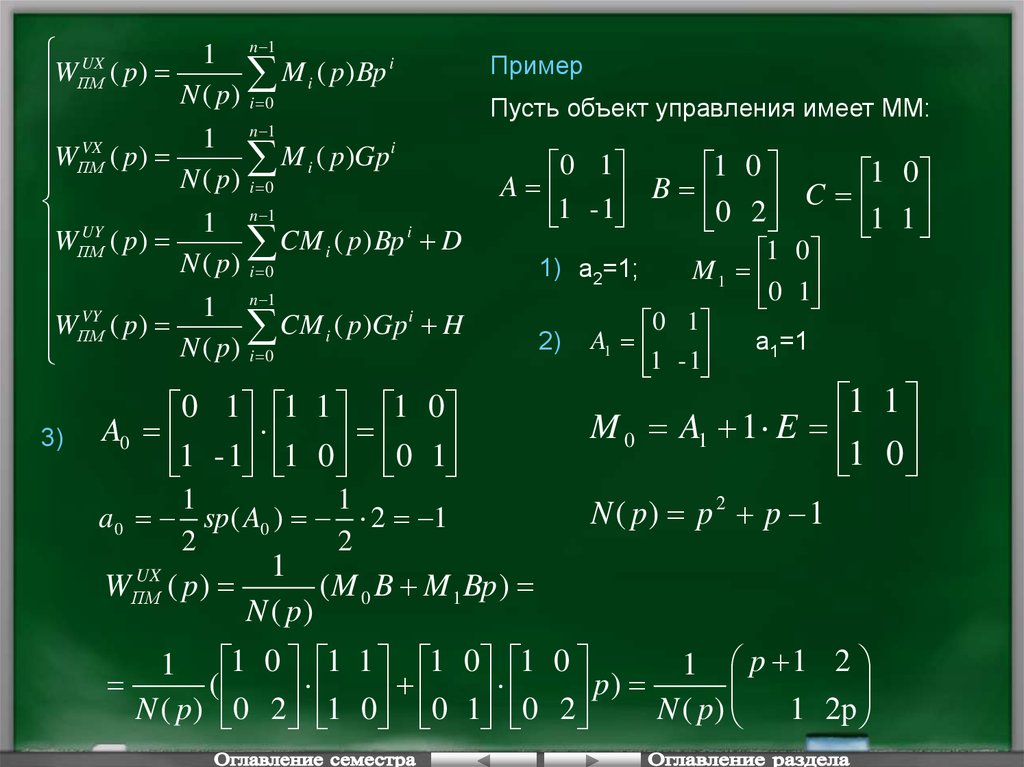
UXWПМ ( p )
VX
WПМ ( p )
W UY ( p )
ПМ
W VY ( p )
ПМ
3)
1 n 1
M i ( p) Bp i
N ( p ) i 0
1 n 1
M i ( p )Gpi
N ( p) i 0
1 n 1
i
CM
(
p
)
Bp
D
i
N ( p) i 0
Пример
Пусть объект управления имеет ММ:
0 1
1 0
1 0
A
B
0 2 C
1 - 1
1
1
1 n 1
i
CM
(
p
)
Gp
H
i
N ( p) i 0
1) a2=1;
2)
1
M1
0
0 1
A1
1
1
0
1
а1=1
0 1 1 1 1 0
A0
1
1
1
0
0
1
1 1
M 0 A1 1 E
1
0
1
1
a 0 sp ( A0 ) 2 1
2
2
N ( p) p 2 p 1
UX
WПМ
( p)
1
( M 0 B M 1 Bp )
N ( p)
1 1 0 1 1 1 0 1 0
1 p 1 2
(
p)
N ( p) 0 2 1 0 0 1 0 2
N ( p) 1 2p
28.
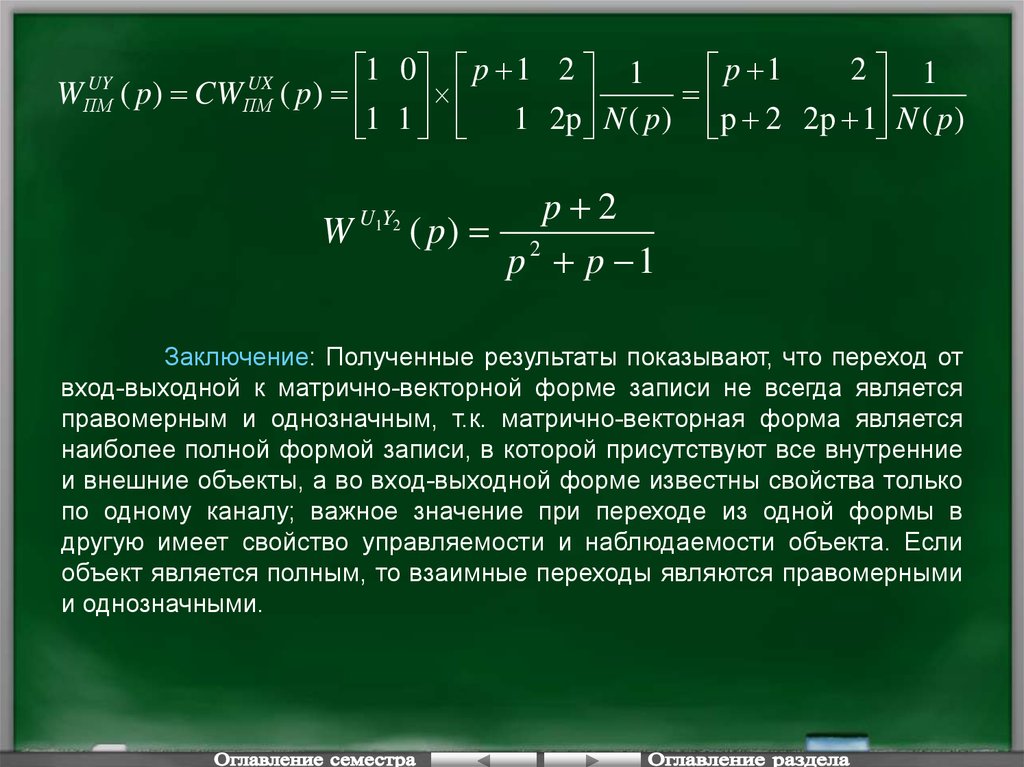
WUY
ПМ
( p) CW
UX
ПМ
2 1
1 0 p 1 2 1
p 1
( p)
N ( p)
1
1
1
2p
p
2
2p
1
N
(
p
)
W
U 1Y2
p 2
( p) 2
p p 1
Заключение: Полученные результаты показывают, что переход от
вход-выходной к матрично-векторной форме записи не всегда является
правомерным и однозначным, т.к. матрично-векторная форма является
наиболее полной формой записи, в которой присутствуют все внутренние
и внешние объекты, а во вход-выходной форме известны свойства только
по одному каналу; важное значение при переходе из одной формы в
другую имеет свойство управляемости и наблюдаемости объекта. Если
объект является полным, то взаимные переходы являются правомерными
и однозначными.
29.
Понятия управляемости и наблюдаемостидинамических систем.
Пренебрежением фактором управления или наблюдения объекта
может привести к ошибочным результатам, в связи с этим рассматривается
два важных понятия:
- наблюдаемость ;
- управляемость.
В результате возникают два важных вопроса:
1. Можно ли, выбрав соответствующим образом входы U(t) перевести ОУ из
некоторого произвольного состояния X (t ) в другое произвольное
0
состояние X (t )
1
2. Можно ли, наблюдая вектор выходов Y(t) в течение достаточно
длительного промежутка времени определить начальное состояние
объекта?
30.
Понятие управляемости.Объект называется полностью управляемым, если для любых
моментов времени t0,t1 (t1> t0), любых заданных состояний x(t0), x(t1)
существует управление U(t), где t0<t<t1, переводящее начальное состояние
x(t0) в конечное x(t1).
Для оценки управляемости используем теорему Калмана:
Для полной управляемости объекта необходимо и достаточно, чтобы
матрица управляемости
M Y [ B | AB | A B | ... | A
2
N 1
B]
имела ранг размерности объекта n. Если ранг меньше n, но больше 0,
значит объект частично управляемый, если ранг равен 0, то неуправляемый.
31.
Понятия наблюдаемости и полнотыОбъект называется полностью наблюдаемым, если по данным измерения,
наблюдения, на конечном интервале времени t0<t<t1, можно определить
начальное состояние. Другими словами объект называется полностью
наблюдаемым, если все его состояния являются наблюдаемыми в любой
момент времени.
Для полной наблюдаемости необходимо и достаточно, чтобы:
M н [C T | AT C T | ( AT ) 2 C T | ... | ( AT ) n 1 C T ]
В случае, если ранг больше 0, меньше n – частично наблюдаемый.
Если объект полностью управляемый и наблюдаемый, то он является
полным.
Примечание: Для определения полноты по вход-выходной форме записи,
необходимо определить корни числителя и знаменателя передаточной
функции, если в числителе и в знаменателе есть одинаковые корни, то такой
объект является неполным.
32.
Понятие стабилизируемости, детектируемости иидентифицируемости
Частично управляемый объект является стабилизируемым в том
случае, если собственные числа системной матрицы, его неуправляемой
части
имеют
отрицательные
вещественные
части
(являются
устойчивыми).
Объект называется детектируемым, если системная матрица его не
наблюдаемой части имеет устойчивый спектр корней.
Объект называется идентифицируемым, если по измерениям
переменных состояния на некотором интервале можно найти матрицу A.
33.
Пример №1:П
- полная
У
- управляемая
П
- неполная
У
- неуправляемая
34.
Пример №2:x 1 x1
x x U
2
2
x 3 2 x3 U
x 3x 2U
4
4
Y x1 x3 0.5 x4
Определим управляемость и
наблюдаемость:
1
x
1 p x1
1
x
2 p ( x 2 U )
1
x3 ( 2 x 2 U )
p
1
x
( 3 x 4 2U )
4
p
Y x1 x3 0.5 x 4
Объект является частично управляемым, т.к.
неуправляемая одна переменная
и частично
наблюдаемым, т.к. не наблюдается одна переменная ;
объект является неполным, поэтому переменные и
нежелательно использовать в законе управления, т.к.
устройство будет работать некорректно.
35.
Понятие базиса в пространстве состоянийСистема всегда записана относительно некоторых конкретных базовых
векторов , которые называются базисом (векторы при этом должны быть
линейно независимыми решениями между собой).
Форма записи матрично-векторных моделей не является единственной
для каждых конкретных A,B,C, конкретные A,B,C соответствуют некоторому
конкретному базису в пространстве состояний. Любое n-мерное линейное
пространство имеет множество различных базисов.
x Ax Bu Gv
y Cx Du Hv
Для перехода к новому базису существует некоторое преобразование,
*
которое обозначается: x Px.
Это преобразование должно удовлетворять следующим условиям: - p –
квадратная матрица и невырожденная [ det( P) 0 ].
x P 1 x*
P 1 x * AP 1 x* Bu Gv
y CP 1 x* Du Hv
x * PAP 1 x* PBu PGv
y CP 1 x* Du Hv
A* PAP 1
B* PB
G* PG
C * P 1C
D* D
H* H
36.
Общие закономерности преобразования МВ ММ кпроизвольно выбранному базису
Поиск необходимого преобразования P может быть различным в
зависимости от того, какова исходная предпосылка преобразования.
1) Преобразование на основе управляемости
Необходимо, чтобы объект
был полностью
управляемым. После
определения
преобразования
обязательно необходимо
сделать его проверку.
M Y [ B | AB | A 2 B | ... | A N 1 B]
M *Y [ B * | A* B * | ( A* ) 2 B * | ... | ( A* ) N 1 B * ]
M *Y [ pB | pAp 1 pB | ... | ( pAp 1 ) N 1 pB]
M *Y pM Y
1
P M * Y M Y (1)
Если преобразование из исходного базиса в новый не дает положительного
результата, то преобразовать объект исходного базиса в заданный
невозможно.
2) Преобразование на основе свойств наблюдаемости
Для его построения необходимо, чтобы объект был полностью
наблюдаемым.
M [C T | AT C T | ... | ( AT ) n 1 C T ]
M
H
*
H
[(C * ) T | ( A* ) T (C * ) T | ... | (( A* ) T ) n 1 (C * ) T ]
P ( M * H ) 1 M H
T
T
(2)
37.
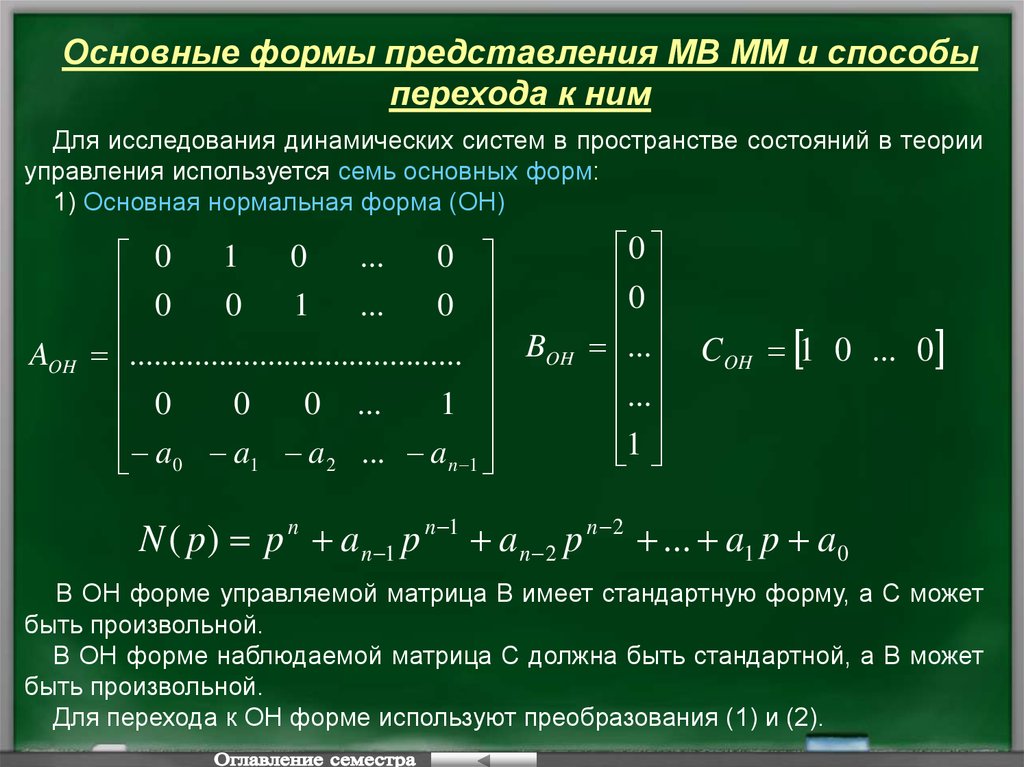
Основные формы представления МВ ММ и способыперехода к ним
Для исследования динамических систем в пространстве состояний в теории
управления используется семь основных форм:
1) Основная нормальная форма (ОН)
AOH
0
1
0
...
0
0
0
0
0
1
...
0
......................................... BOH ...
0
0 ...
1
...
0
1
a 0 a1 a 2 ... a n 1
C OH 1 0 ... 0
N ( p ) p n a n 1 p n 1 a n 2 p n 2 ... a1 p a 0
В ОН форме управляемой матрица В имеет стандартную форму, а С может
быть произвольной.
В ОН форме наблюдаемой матрица С должна быть стандартной, а В может
быть произвольной.
Для перехода к ОН форме используют преобразования (1) и (2).
38.
2) Транспонированная ОН (ТОН)AТОН
a0
0 0 0 ...
1
1 0 0 ...
0
a
1
.................................... BTOH ...
0
0
0
...
a
n 2
...
0 0 0 ... a n 1
0
CTOH 0 0 ... 1
Для перехода к данной форме, обычно используют специальные
преобразования:
а)
p1
TOH
CA n 1 a n 1CA n 2 ... a1C
..........
..........
..........
..........
....
CA 2 a n 1CA a n 2 C
CA a n -1C
C
Исходный базис должен быть в ОН – форме.
б)
p2
ТОН
МY
1
, где
МY
- матрица управляемости
39.
3) Дополнительная нормальная формаA ДОП
a n 1 1 0 ... 0
a
0
1
...
0
n
2
............................
a
0
0
...
1
1
a 0 0 0 ... 0
В ДОП ВОН
С ДОП С ОН
4) Обратная нормальная форма
AОБР
an 1 an 2 ... a0
1
0 ... 0
...................................
0
0 . .. 0
0 . .. 0
0
ВОБР ВТОН
С ОБР СТОН
Для перехода к ней применяют преобразования (1) или (2).
5) Каноническая диагональная форма (КД)
AКД
где
1 0 ... 0
0 ... 0
2
....................
0
0
...
0
0 0 ... n
BКД
i - собственные числа матрицы А
1
1
...
...
1
b1
b2
....
....
bn
C КД b1 b2 ... bn
1
1
...
1
40.
Для перехода к данной форме записи используют специальныепреобразования с помощью матрицы Вандермонда:
1
1 ... 1
1
2 3 ... n
1
W 12
22 32 ... 2n
.......................................
n 1 n 1 n 1 ... n 1
2
3
n
1
PКД W 1
Для перехода к диагональной форме записи необходимо сначала
преобразовать к ОН форме.
6) Жорданово - каноническая форма
AЖК
A1 0 ... 0
0 A ... 0
2
......................
0 0 ... 0
0 0 ... A n
В ЖК В КД С ЖК С КД ,где
7) Треугольная форма
1 a 12 ...
AТР
a 1,n
0 2 ... a 2,n
.................... ...........
0 0 ... a n -1,n -1
n
0 0 ...
ВТР В КД С С
ТР
КД
Ai - клетки Жордана
Из данных 7 форм, наибольшее
распространение получили три:
а) ОН
б) ТОН
в) КД
41.
Наблюдатели (идентификаторы) состояниялинейных динамических объектов и систем
Динамический наблюдатель состояния (ДНС) – техническое устройство,
позволяющее с использованием доступных измерению вход-выходных
переменных объекта, получать текущую оценку состояния объекта с
некоторой, достаточной степенью точности.
x н Aн x н BнU FнY
Схема наблюдателя:
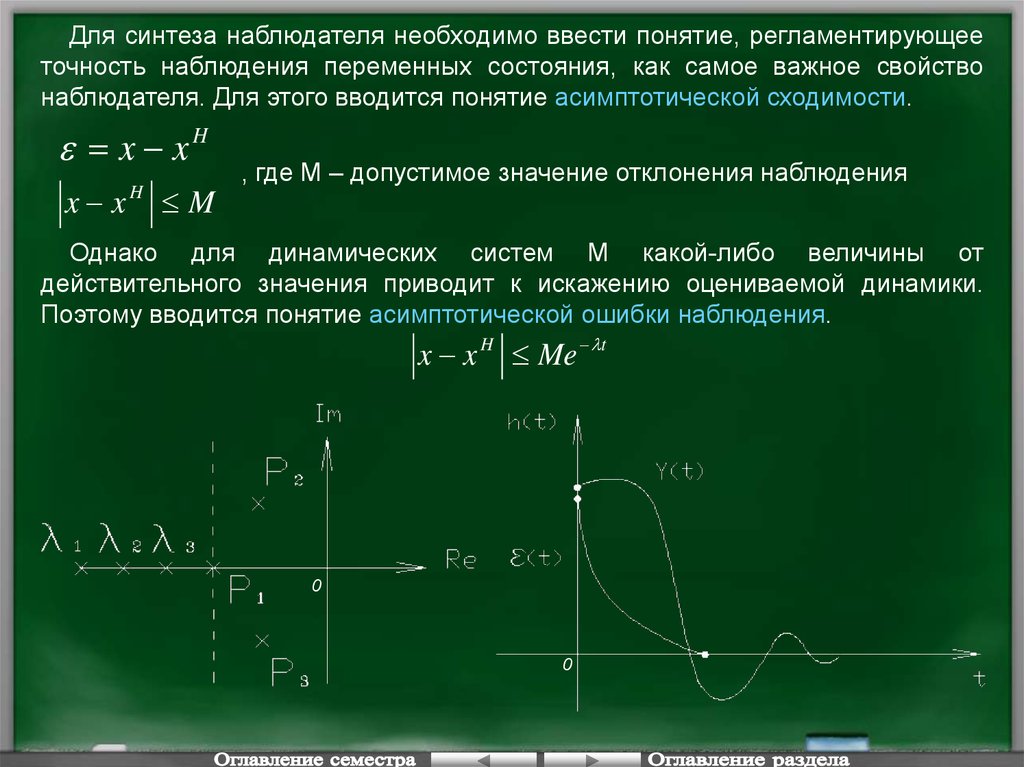
42.
Для синтеза наблюдателя необходимо ввести понятие, регламентирующееточность наблюдения переменных состояния, как самое важное свойство
наблюдателя. Для этого вводится понятие асимптотической сходимости.
x xH
x x
H
M
, где М – допустимое значение отклонения наблюдения
Однако для динамических систем М какой-либо величины от
действительного значения приводит к искажению оцениваемой динамики.
Поэтому вводится понятие асимптотической ошибки наблюдения.
x x H Me t
0
0
43.
В теории управления применяется 2 типа наблюдателей состояний:1) Наблюдатель состояния Калмана (так называемый полный
наблюдатель).
2) Наблюдатель состояния Луенбергера (так называемый
редуцированный наблюдатель).
Наиболее распространенным в инженерной практике является ДНС
Калмана.
Условия асимптотической оценки наблюдателя состояния:
1) BH B
2) A H А FH C
( FH - вектор обратных связей наблюдателя, формирующий его динамические
свойства).
Модель наблюдателя (Калмана):
x н Ax н BU FH (Y Y н )
44.
Для обеспечения асимптотического затухания ошибки наблюдениянеобходимо, чтобы имела устойчивый спектр корней и чтобы характер
затухания удовлетворял условиям асимптотической ошибки необходимо
выполнение условия: min Re( p H ) max Re( p )
i
i
Из второго условия можно определить вектор обратных связей
наблюдателя:
FH C A AH
1) AOH
1
0
0
0
0
1
- a 0 a1 a 2
0
1
0
H
AOH
0
0
1
- aH aH aH
1
2
0
f1
FH f 2
C [1 0 0]
f 3
COH [1 0 0]
н
COH
[1 0 0]
Вывод:
Основная
нормальная форма записи
является непригодной для
формирования
вектора
обратных связей ДНС, т.к.
невозможно
определить
все его (
)
FН
коэффициенты.
f1 0 0
0
0
0
FH C f 2 0 0 AOH A0HH H
H
H
(
a
a
)
(
a
a
)
(
a
a
)
0
1
1
2
2
0
f 3 0 0
45.
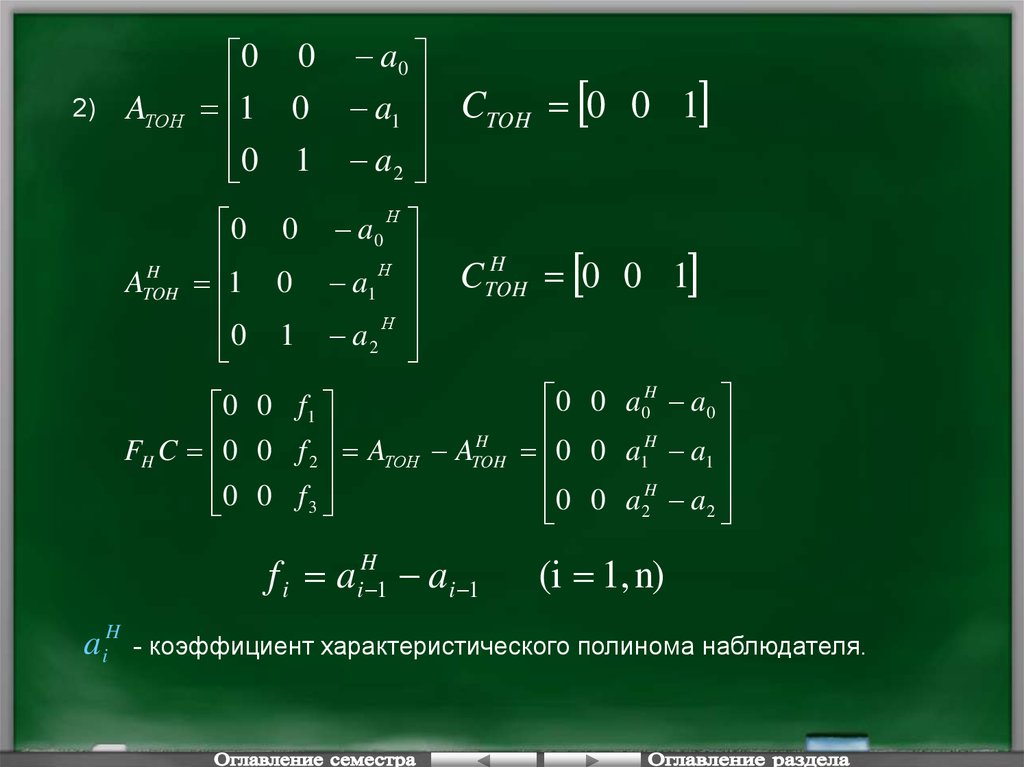
2)AТОН
H
TOH
A
0 0 a 0
1 0 a1 CTOH 0 0 1
0 1 a 2
0 0
1 0
0 1
Н
a0
Н
a1
Н
a 2
H
CTOH
0 0 1
H
0
0
a
0
0
f
0 a0
1
H
FH C 0 0 f 2 AТOH ATOH
0 0 a1H a1
0 0 a H a
0 0 f 3
2
2
f i a iH 1 a i 1
a iH
(i 1, n)
- коэффициент характеристического полинома наблюдателя.
46.
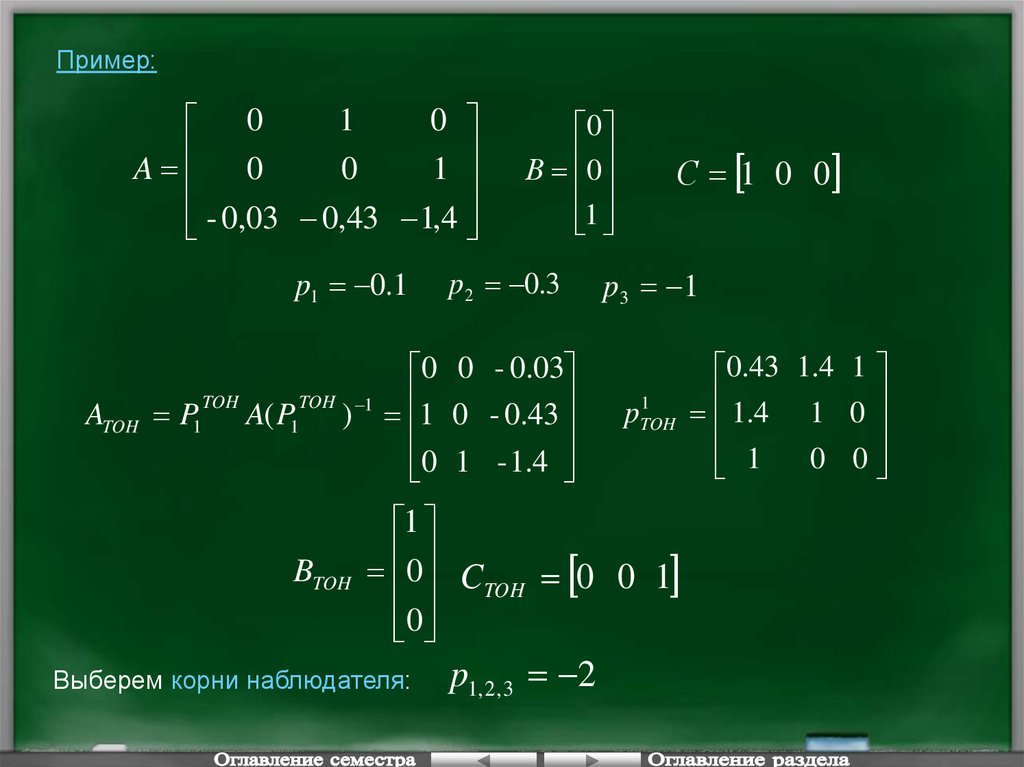
Пример:1
0
0
A 0
0
1
- 0,03 0,43 1,4
p1 0.1
ATOH
0
В 0
1
p 2 0.3
0 0 - 0.03
TOH
TOH
P1 A( P1 ) 1 1 0 - 0.43
0 1 - 1.4
BTOH
С 1 0 0
p 3 1
1
pTOH
1
0 CTOH 0 0 1
0
Выберем корни наблюдателя:
p1, 2,3 2
0.43 1.4 1
1.4 1 0
1
0 0
47.
N H ( p ) ( p 2) 3 p 3 6 p 2 12 p 8H
ATOH
0 0 8
1 0 12
0 1 6
f1 8 0.03 7.97
f 2 12 0.43 11.57
f 3 6 1.4 4.6
a 0 0.03
a 0H 8
a1 0.43
a 1H 12
a 2 1 .4
a H2 6
7.97
FH 11.57
4.6
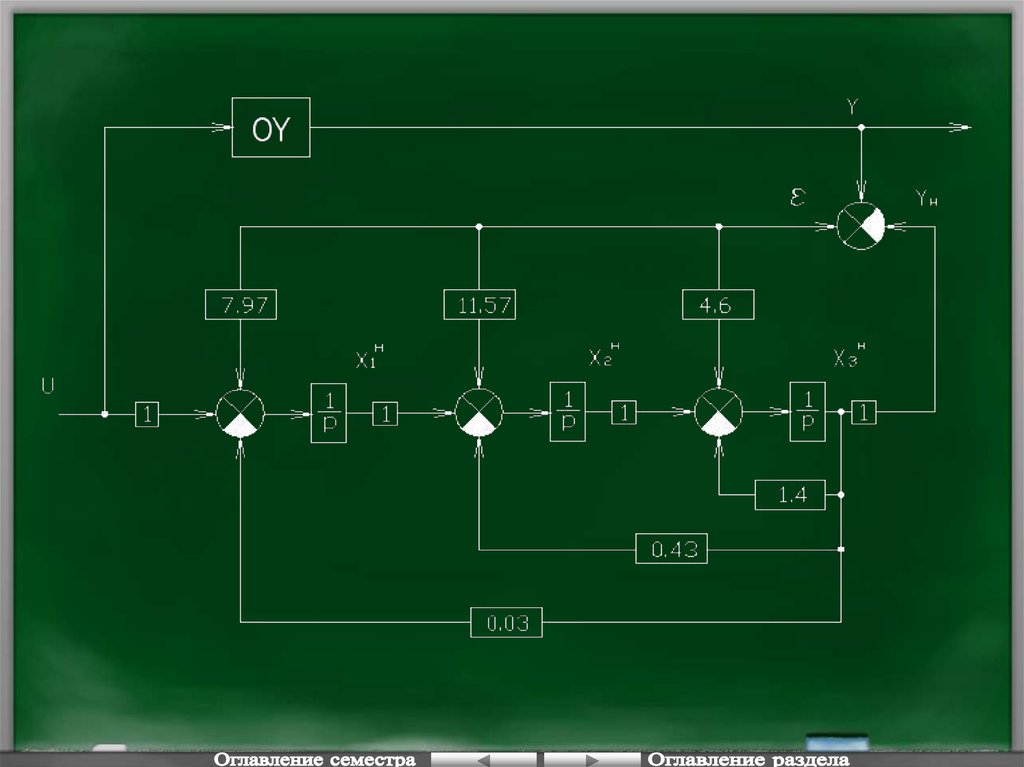
x H AxH BU FH (Y Y )
H
BTOH
1
0
0
48.
49.
Преимуществом использования ДНС при построении САУ по сравнению склассическими вход - выходными методами является то, что появляется
возможность для формирования закона управления не только
непосредственно изменяемых Y и входных воздействий U, но и всех
наблюдаемых переменных состояния, оценивающих реальные переменные
с точностью определенной выбранными параметрами асимптотической
оценки.
Достоинство
асимптотического
ДНС
Калмана
состоит
в
его
универсальности и в высокой эффективности наблюдаемых переменных
состояния, т.е. независимо от причин отклонения действительных значений
этих переменных, наблюдаемые переменные сводятся к ним со скоростью,
определяемой выбранными значениями собственных чисел наблюдателя.
50.
Недостатком является его большая сложность при высокойразмерности объекта, т.к. он является полным. Во многих реальных случаях
выходная переменная Y совпадает с одной из переменных состояния, тогда
оценка соответствующей переменной оказывается лишней, кроме того
практически всегда базис объекта можно преобразовать так, чтобы
указанное условие соблюдалось, более того в многомерных объектах базис
можно построить таким образом, чтобы выходные переменные совпадали с
таким же количеством переменных состояния, тогда появляется
возможность создать редуцированный или усеченный наблюдатель с общей
экономией, соответствующий общему количеству выходных переменных Y.
51.
Редуцированный наблюдатель состояния.Для синтеза ДНС необходимо объект преобразовать к ТОН форме
записи наблюдаемой.
Необходимо применить преобразование:
1 0 ... - j0
1 0 ... j0
0 E ... ...
0 E ... ...
p 1
pi
L
.....................
...................
0 0 ... 1
0 0 ... 1
ji
- коэффициент характеристического полинома наблюдателя состояний.
Свойства ДНС выбираются аналогично ДНС Калмана, но размерность
наблюдателя на единицу меньше размерности объекта.
52.
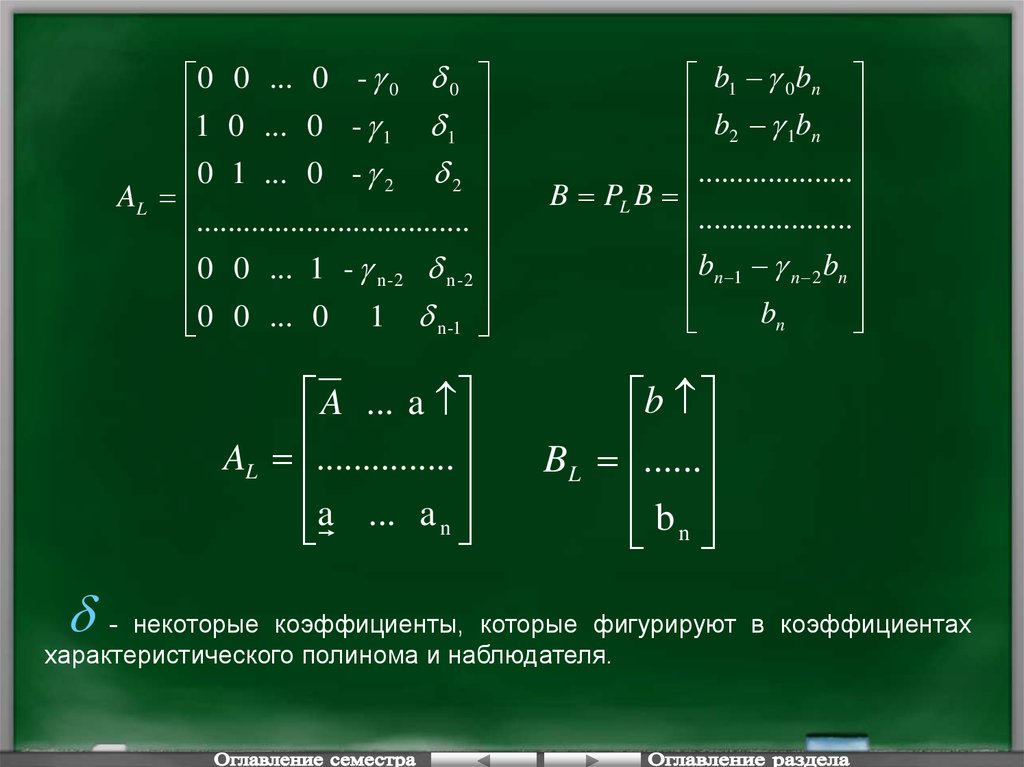
0 0 ... 0 - 0 01 0 ... 0 -
1
1
0 1 ... 0 - 2 2
AL
..........
..........
..........
.....
0 0 ... 1 - n -2 n -2
0 0 ... 0 1 n -1
A ... a
AL ...............
a ... a n
b1 0 bn
b b
1 n
2
....................
B PL B
....................
bn 1 n 2 bn
bn
b
B L ......
bn
- некоторые коэффициенты, которые фигурируют в коэффициентах
характеристического полинома и наблюдателя.
53.
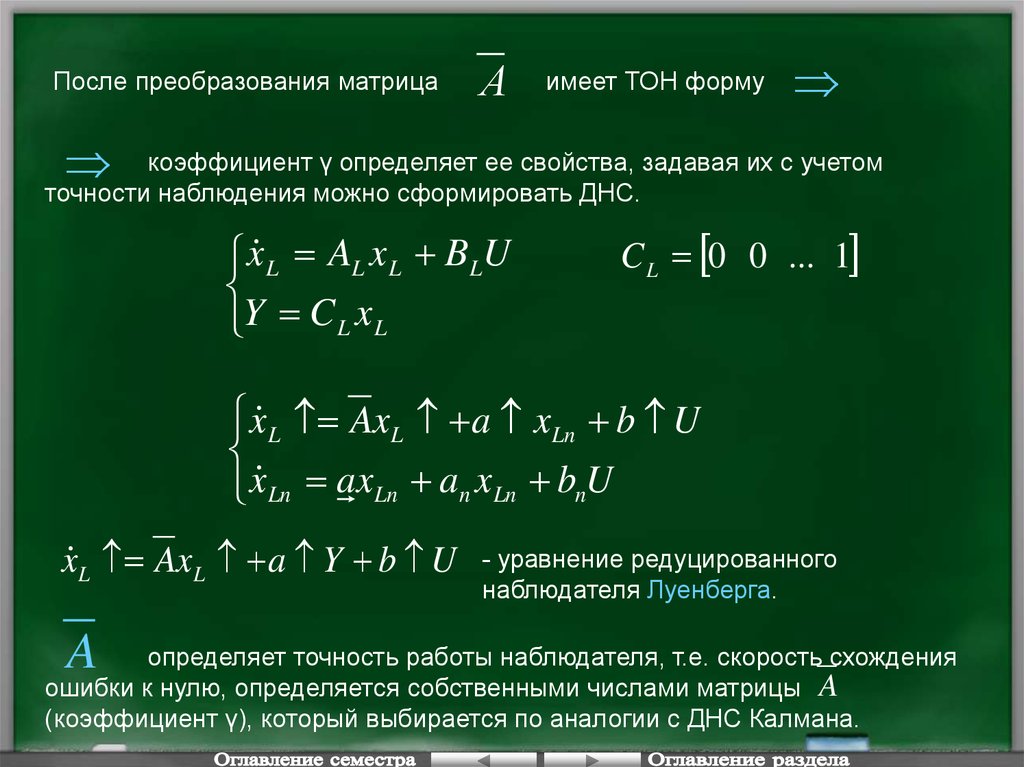
После преобразования матрицаА
имеет ТОН форму
коэффициент γ определяет ее свойства, задавая их с учетом
точности наблюдения можно сформировать ДНС.
x L AL x L BLU
Y C L x L
C L 0 0 ... 1
x L AxL a xLn b U
x Ln axLn an xLn bnU
x L AxL a Y b U
A
- уравнение редуцированного
наблюдателя Луенберга.
определяет точность работы наблюдателя, т.е. скорость схождения
ошибки к нулю, определяется собственными числами матрицы A
(коэффициент γ), который выбирается по аналогии с ДНС Калмана.
54.
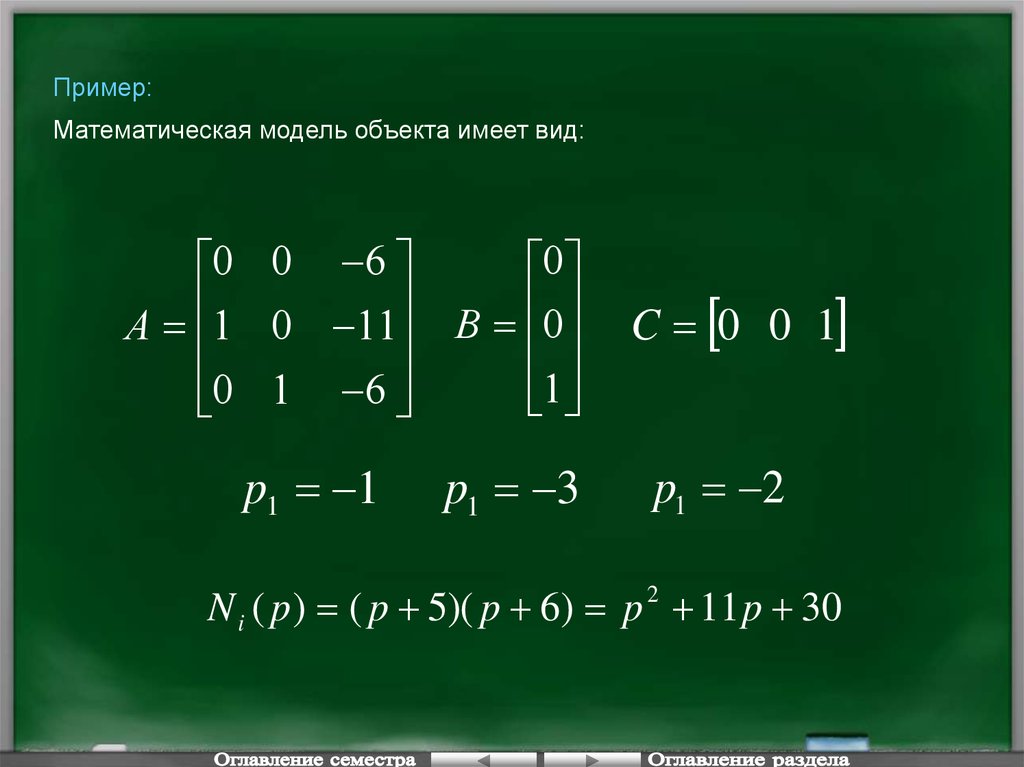
Пример:Математическая модель объекта имеет вид:
0
0 0 6
A 1 0 11 B 0
1
0 1 6
p1 1
p1 3
C 0 0 1
p1 2
N i ( p ) ( p 5)( p 6) p 2 11 p 30
55.
1 0 30PL 0 1 11
0 0 1
0 30 156
AL PL APL 1 1 11 36
0 1
5
0 30
A
;
1 11
156
a
; a 0 1 ; an 5;
36
30
30
BL 11 , где b
; bn 1;
11
1
56.
57.
Недостатком наблюдателя Луенбергера по сравнению с наблюдателемКалмана является то, что в нем отсутствует сравнение действительного и
наблюдаемого значения переменной состояния и подстройка переменных
состояния к истинным значениям с помощью обратной связи.
Осуществляется в плане участия переменной в формировании динамики
переменной состояния в соответствии с исходной моделью. В результате,
выигрывая в простоте реализации наблюдателя проигрывают в точности
оценки состояния.
При спонтанных отклонениях начальных значений переменная ошибка
наблюдения подавляется с интенсивностью, заданной коэффициентами γ,
но при наличии постоянно действующего неконтролируемого воздействия
наблюдаемость осуществляется также с постоянной, не равной нулю
ошибкой. В этом отношении наблюдатель Калмана более эффективен, чем
наблюдатель Луенбергера.
58.
Системы с обратной связью по состояниюМодальное управление объектами.
Рассмотрение объектов и систем в пространстве состояний имеет то
преимущество, что при замыкании такой системы обратной связью имеется
возможность выбора эффективных (наилучших) значений коэффициентов
операторов обратной связи по каждой переменной состояния.
Такой подход дает больше возможностей для формирования устойчивой
системы и придания ей заданного качества, так как n-мерный статический
регулятор обратной связи имеет n-степеней свободы, тогда как П - регулятор
при вход-выходном описании имеет только одну степень свободы.
59.
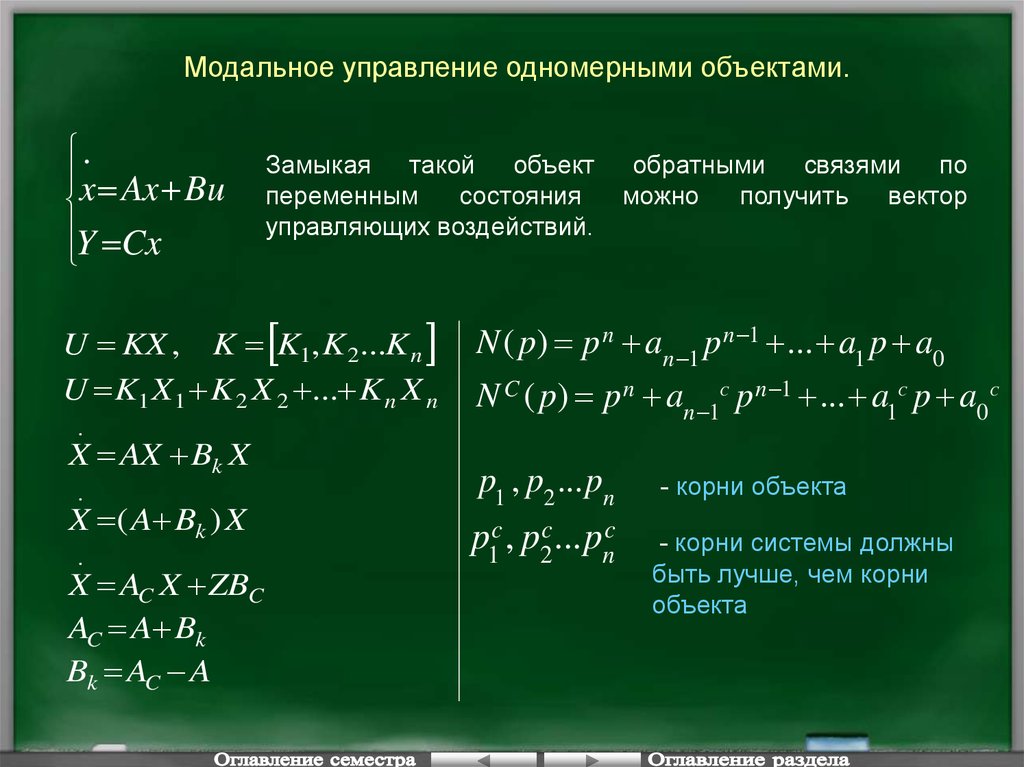
Модальное управление одномерными объектами..
x Ax Bu
Y Cx
Замыкая такой объект
переменным
состояния
управляющих воздействий.
U KX , K K1, K 2...K n
U K1 X 1 K 2 X 2 ... K n X n
.
X AX Bk X
N ( p) p n an 1 p n 1 ... a1 p a0
N C ( p) p n an 1 p n 1 ... a1 p a0
C
.
p1 , p2 ... pn
.
p1c , p2c ... pnc
X ( A Bk ) X
X AC X ZBC
AC A Bk
Bk AC A
обратными связями по
можно
получить
вектор
C
- корни объекта
- корни системы должны
быть лучше, чем корни
объекта
C
60.
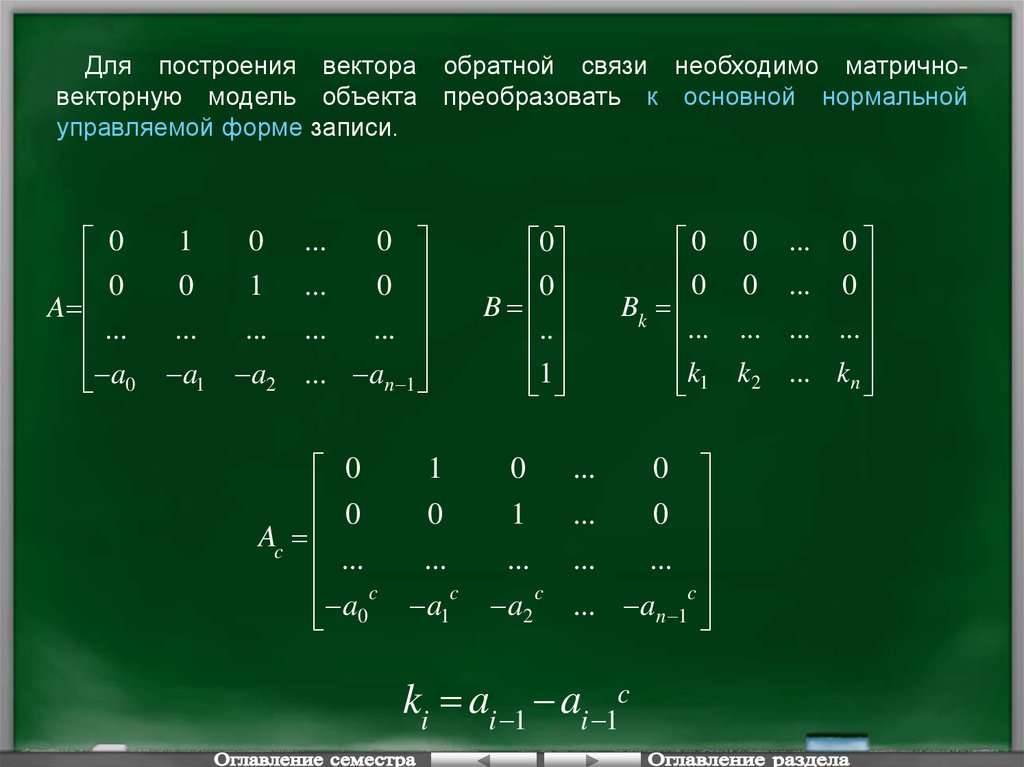
Для построения вектора обратной связи необходимо матричновекторную модель объекта преобразовать к основной нормальнойуправляемой форме записи.
0
0
A
...
a0
1
0
0
1
...
...
a1 a2
...
0
...
0
...
...
... an 1
0
0
Ac
...
c
a0
1
0
...
a1c
0
0
B
..
1
0
1
...
a2 c
0 0
0 0
Bk
... ...
k1 k2
...
0
...
0
...
...
... an 1c
ki ai 1 ai 1c
... 0
... 0
... ...
... kn
61.
Управление, при котором корни (моды) характеристического полиномасистемы принимают заранее заданные значения называется модальным.
Пример:
Построить систему модального управления для объекта вида:
0 1 0
A 0 0 1
0 2 5
0
B 0
1
N ( p) p 3 5 p 2 2 p
Выберем корни будущей системы исходя из условия устойчивости
системы.
p1c 5
p2c,3 10 5 j
62.
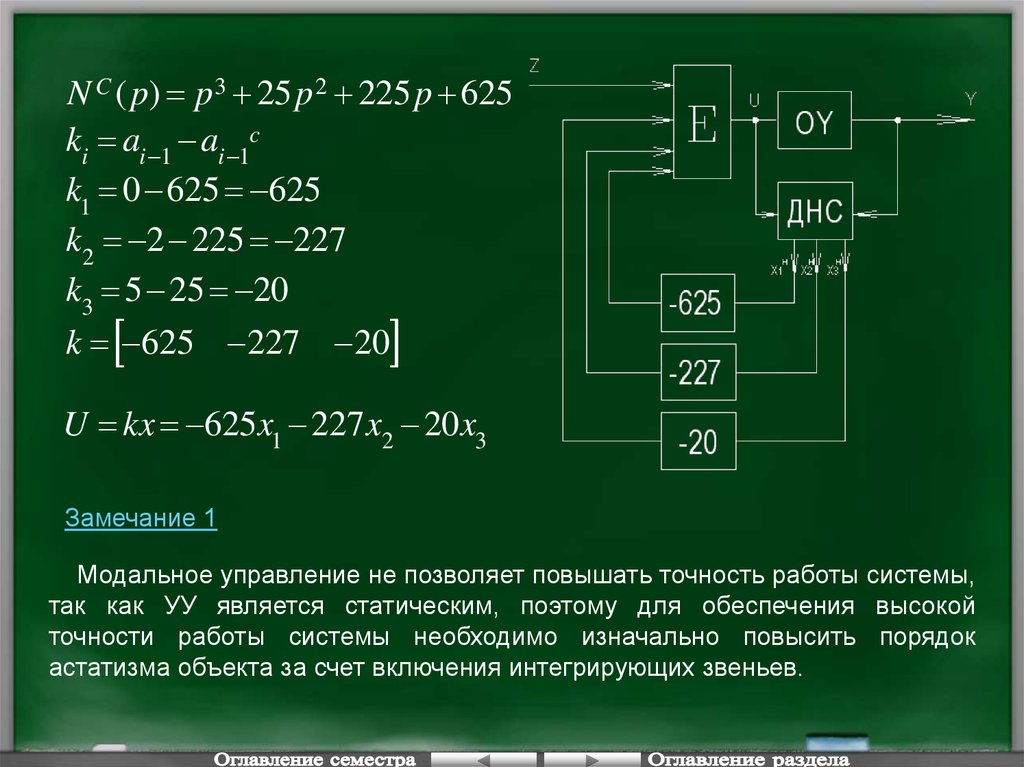
N C ( p) p 3 25 p 2 225 p 625ki ai 1 ai 1c
k1 0 625 625
k2 2 225 227
k3 5 25 20
k 625 227 20
U kx 625x1 227 x2 20 x3
Замечание 1
Модальное управление не позволяет повышать точность работы системы,
так как УУ является статическим, поэтому для обеспечения высокой
точности работы системы необходимо изначально повысить порядок
астатизма объекта за счет включения интегрирующих звеньев.
63.
Замечание 2Ограниченность модального управления состоит в том, что обратная
связь по переменным состояния изменяет моды только характеристического
полинома. Если вход-выходная модель объекта имеет полином в правой
части, то он переходит во вход-выходное описание системы без изменений.
Но так как числитель не влияет на устойчивость системы, то его необходимо
учитывать
только
в
случае
обеспечения
высокого
качества
функционирования систем.
Корни системы выбираются лучше, чем у объекта и они должны
обеспечивать заданное качество. В данном случае необходимо, чтобы
время регулирования было в 5 раз меньше.
p1 1
p2 2
p3 3
N ( p) ( p 1)( p 2)( p 3) p 3 6 p 2 11 p 6
p1c 5
p2c 6
p3c 7
64.
Модальное управление многомерными объектами.Если у объекта количество вводов больше одного, то модальное
управление также можно реализовать как и в одномерном случае, с той
лишь разницей, что вектор k превратится в матрицу k -> m x n, где m – число
входных воздействий
65. Управление и наблюдение в многомерных системах. Разделяющиеся преобразования.
Многомерный ДНС Луенбергера.Преобразования, разделяющиеся по наблюдениям.
Для построения такого наблюдателя в многомерном cлучае, необходимо
преобразовать ММ объекта таким образом, чтобы она была представлена
таким же количеством подсистем, сколько измеряемых выходов имеет
объект, тогда возможно построение одномерных НЛ.
x Ax Bu
y Cx
B n m ,
C r m
(r - количество выходов)
66.
Необходимо разделить объект на подсистемы.C1
C
C 2
.....
C r
Для обеспечения правильного разделения
необходимо, чтобы объект был наблюдаемым (частично).
Алгоритм построения преобразования, разделяющегося по
наблюдению.
1) Выбираем в качестве элементов промежуточной матрицы Q,
используемой для построения матрицы разделяющейся по наблюдению.
Q PRN
R – линейно-независимых строк матрицы C
67.
C1C2
...
C
r
C1 A C1 A 2
C2 A C2 A2
...
...
Cr A Cr A2
... C1 A 1 1
2 1
... C 2 A
...
...
... C r A r 1
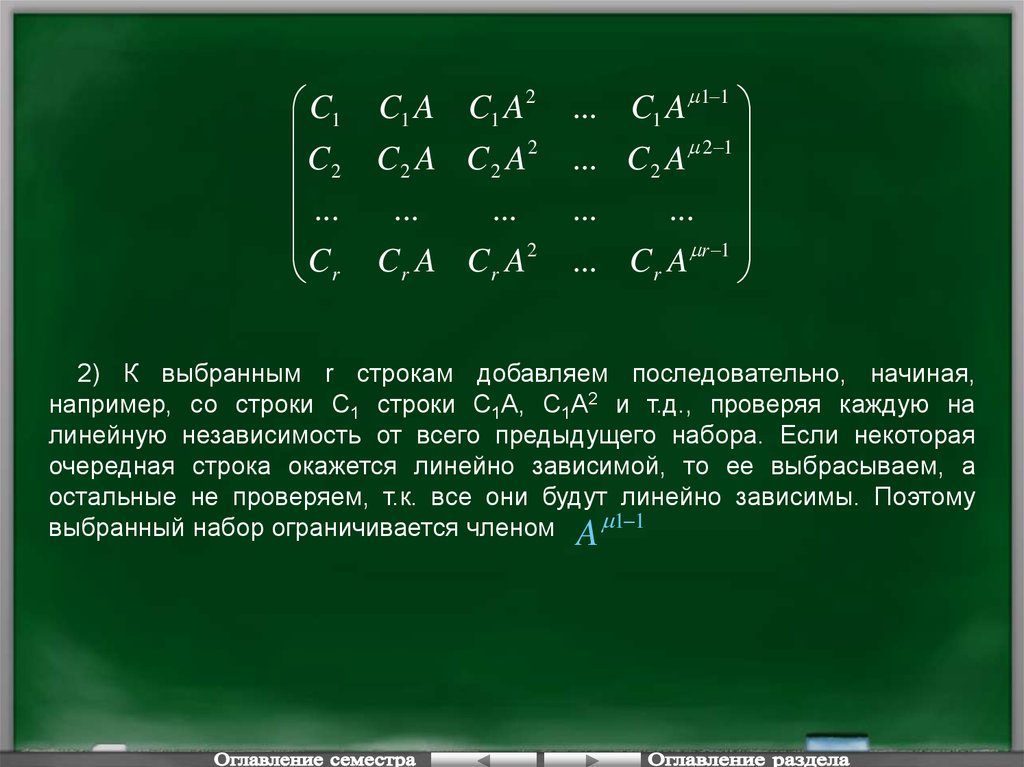
2) К выбранным r строкам добавляем последовательно, начиная,
например, со строки С1 строки С1А, С1А2 и т.д., проверяя каждую на
линейную независимость от всего предыдущего набора. Если некоторая
очередная строка окажется линейно зависимой, то ее выбрасываем, а
остальные не проверяем, т.к. все они будут линейно зависимы. Поэтому
выбранный набор ограничивается членом A 1 1
68.
3) Из выбранных n строк строим матрицу Q по правилу:C1
CA
1
.............
1 1
C
A
1
Q
C2
C2 A
..........
...
C r A r 1
Q 1 q1 ... q 1 | q2 ... q 2 | ... q r
4) С использованием обратной матрицы Q, строится матрица
преобразования.
PRN
1
[q 1 Aq 1 ... A 1 1 q 1 | q 2 Aq 2 ... A 2 1 q 1 | ... ]
ARN PRN APRN
1
69.
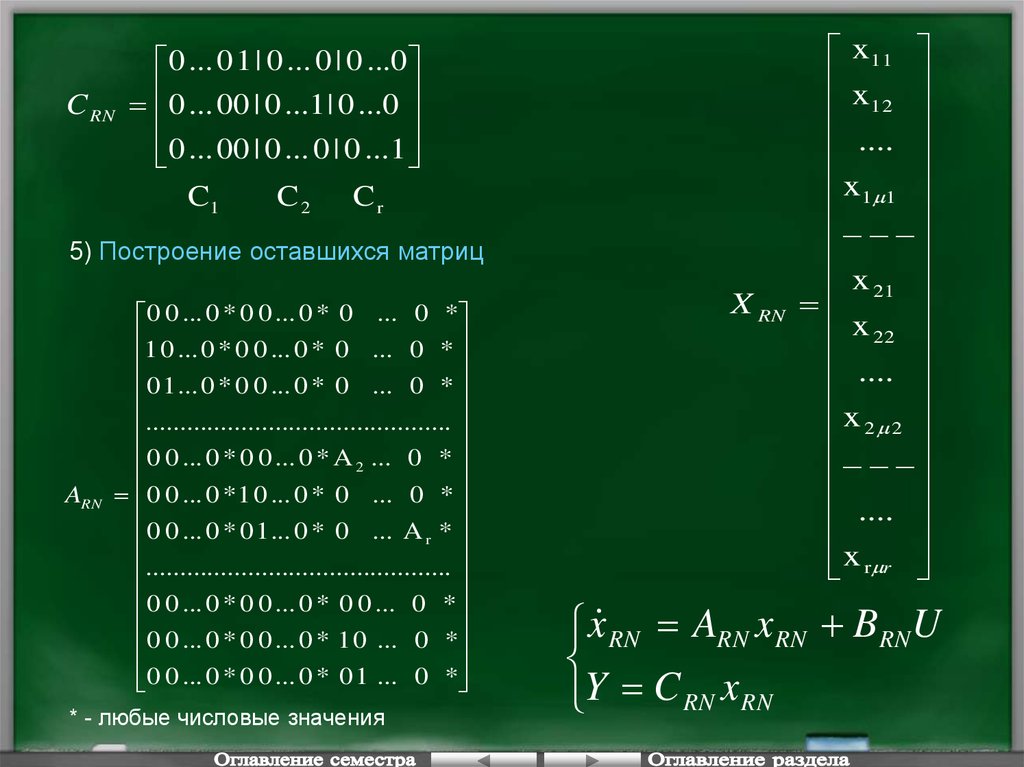
C RN0 ... 0 1 | 0 ... 0 | 0 ...0
0 ... 00 | 0 ...1 | 0 ...0
0 ... 00 | 0 ... 0 | 0 ... 1
C1
C2 Cr
5) Построение оставшихся матриц
ARN
0 0 ... 0 * 0 0 ... 0 * 0 ... 0 *
1 0 ... 0 * 0 0 ... 0 * 0 ... 0 *
0 1 ... 0 * 0 0 ... 0 * 0 ... 0 *
..........
..........
..........
..........
.....
0 0 ... 0 * 0 0 ... 0 * A 2 ... 0 *
0 0 ... 0 * 1 0 ... 0 * 0 ... 0 *
0 0 ... 0 * 0 1 ... 0 * 0 ... A *
r
.............................................
0 0 ... 0 * 0 0 ... 0 * 0 0 ... 0 *
0 0 ... 0 * 0 0 ... 0 * 1 0 ... 0 *
0
0
...
0
*
0
0
...
0
*
0
1
...
0
*
* - любые числовые значения
X RN
x11
x
12
....
x
1 1
x 21
x
22
....
x
2 2
....
x
r r
x RN ARN x RN BRN U
Y C RN x RN
70.
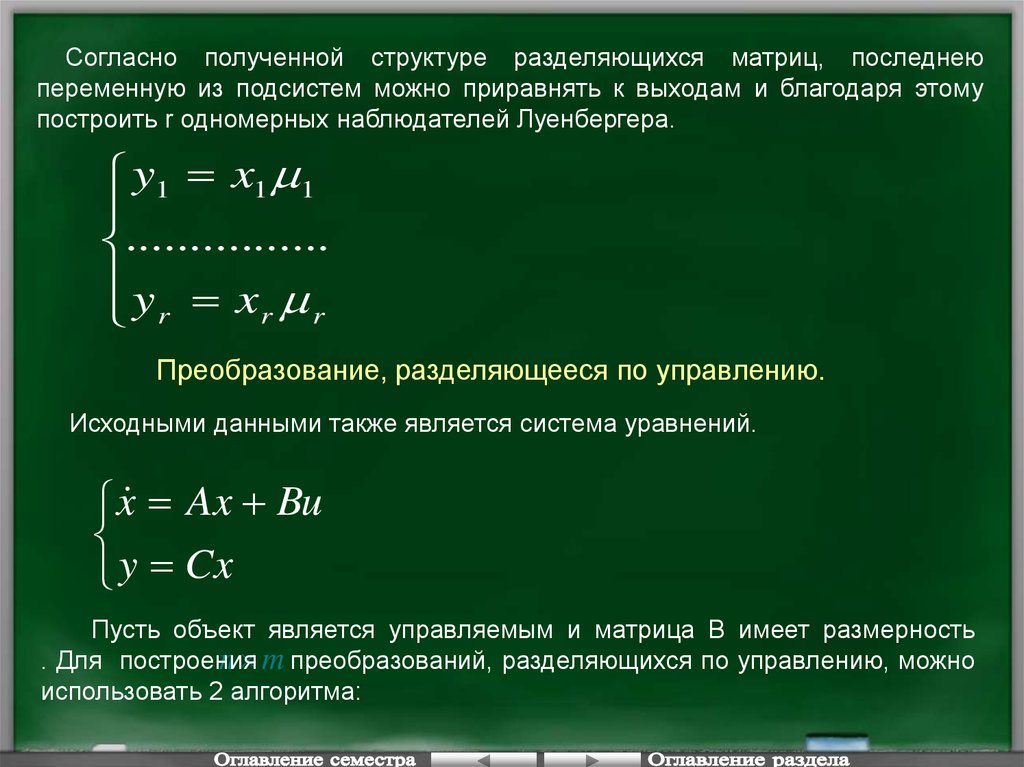
Согласно полученной структуре разделяющихся матриц, последнеюпеременную из подсистем можно приравнять к выходам и благодаря этому
построить r одномерных наблюдателей Луенбергера.
y1 x1 1
................
y x
r
r
r
Преобразование, разделяющееся по управлению.
Исходными данными также является система уравнений.
x Ax Bu
y Cx
Пусть объект является управляемым и матрица В имеет размерность
n m преобразований, разделяющихся по управлению, можно
. Для построения
использовать 2 алгоритма:
71.
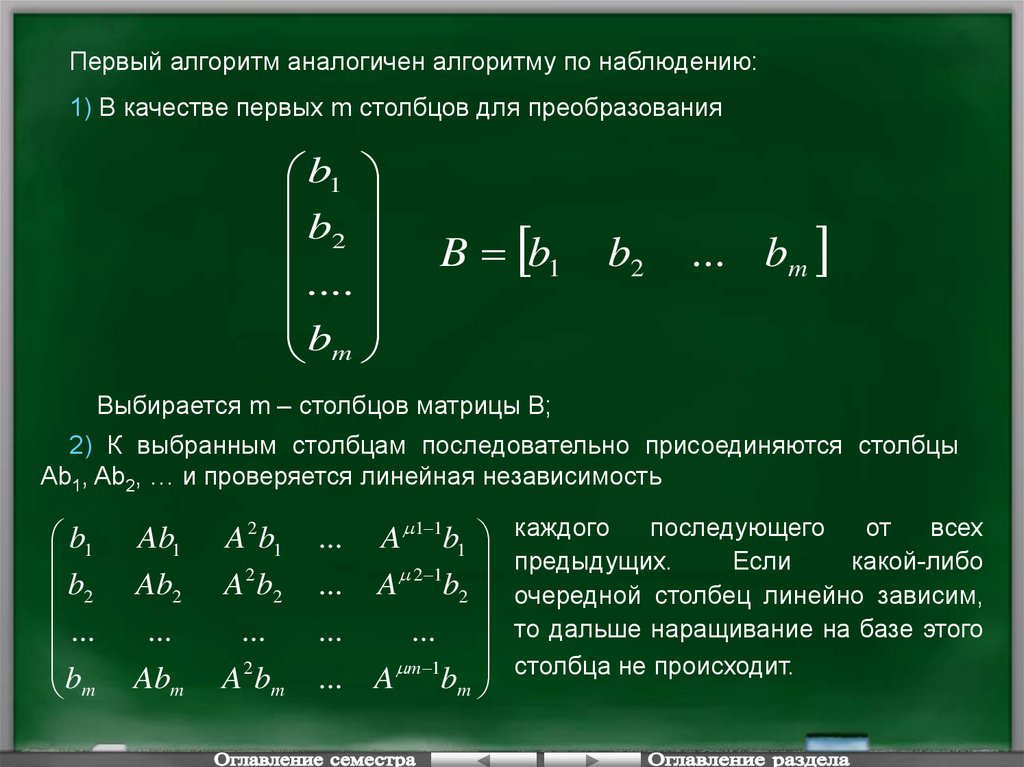
Первый алгоритм аналогичен алгоритму по наблюдению:1) В качестве первых m столбцов для преобразования
b1
b2
....
b
m
B b1
b2
... bm
Выбирается m – столбцов матрицы В;
2) К выбранным столбцам последовательно присоединяются столбцы
Ab1, Ab2, … и проверяется линейная независимость
b1
b2
...
b
m
Ab1
Ab2
...
A 2 b1
A 2 b2
...
...
...
...
Abm
A 2 bm
...
A 1 1b1
A 2 1b2
...
m 1
A bm
каждого
последующего
от
всех
предыдущих.
Если
какой-либо
очередной столбец линейно зависим,
то дальше наращивание на базе этого
столбца не происходит.
72.
На базе столбцов строится матрица преобразования, ее столбцырасполагаются также, как располагались
строки в преобразования,
разделяющиеся по наблюдению.
PRU
1
b1 Ab1 ... A 1 1b1 | b2 Ab2 ... A 2 1b2 | ... A m 1bm
С помощью рассмотренного преобразования одна математическая модель
разлогается на m подсистем, размерностью
является
i (i 1..m)
одномерной
по
входу.
Таким
образом
появляется
возможность
последовательного синтеза по каждой из компонент управления отдельно.
В результате преобразования
PRU матрица
ARU 1 ARN .
73.
B RU 11 | 0 | 0
0 | 0 | 0
..............
0
|
0
|
0
- - - - - - -
0
|
1
|
0
0 | 0 | 0
..............
0 | 0 | 1
- - - - - - -
0
|
0
|
0
0 | 0 | 0
..........
....
0 | 0 | 0
При линейной зависимости столбцов
матрицы В или при необходимости выделить
достаточное
подмножество
управляемых
воздействий для управляемости объекта
можно применить второй алгоритм:
74.
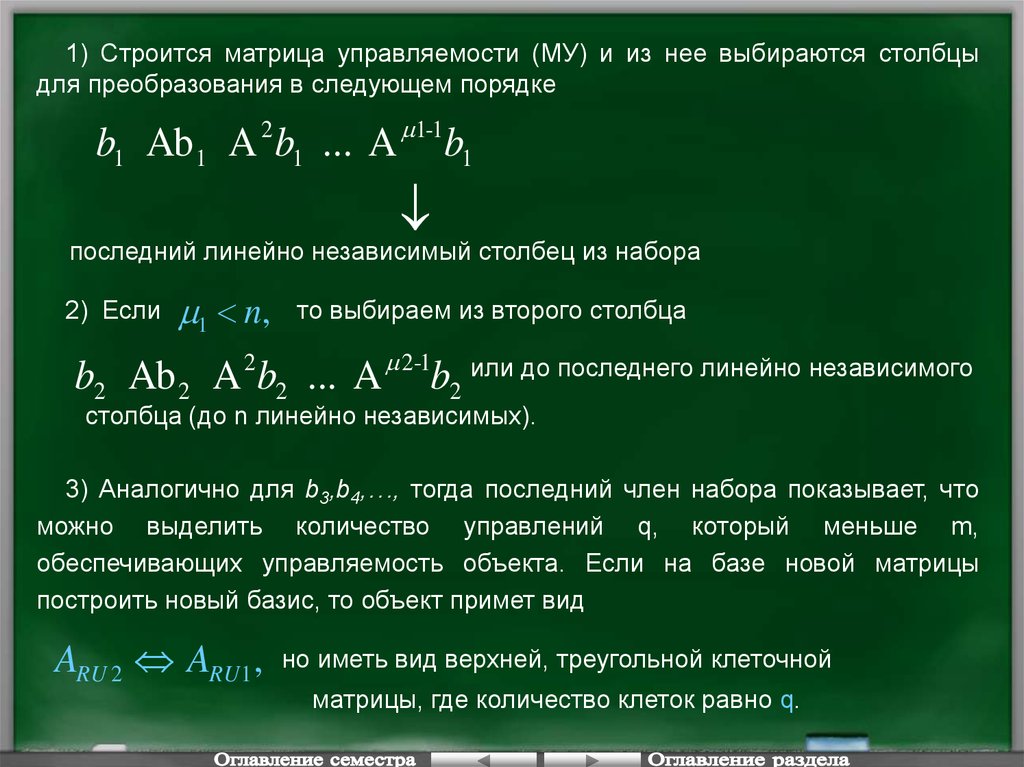
1) Строится матрица управляемости (МУ) и из нее выбираются столбцыдля преобразования в следующем порядке
b1 Ab 1 A 2 b1 ... A 1-1b1
последний линейно независимый столбец из набора
2) Если
1 n,
то выбираем из второго столбца
b2 Ab 2 A 2b2 ... A 2-1b2 или до последнего линейно независимого
столбца (до n линейно независимых).
3) Аналогично для b3,b4,…, тогда последний член набора показывает, что
можно выделить количество управлений q, который меньше m,
обеспечивающих управляемость объекта. Если на базе новой матрицы
построить новый базис, то объект примет вид
ARU 2 ARU 1 ,
но иметь вид верхней, треугольной клеточной
матрицы, где количество клеток равно q.
75.
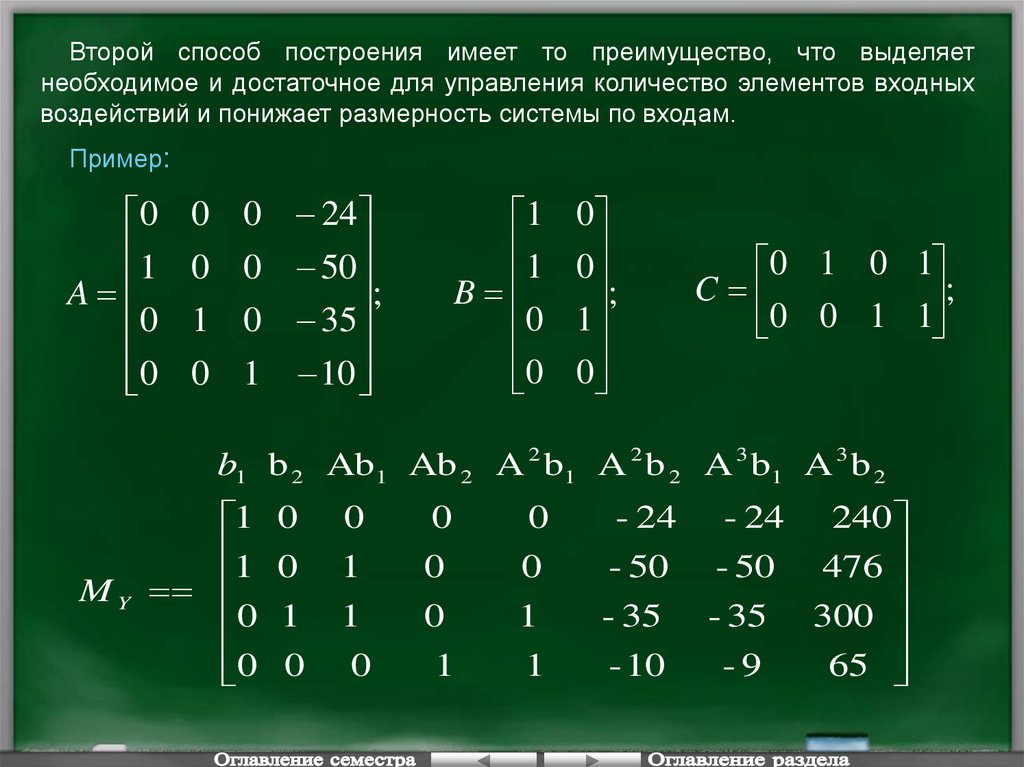
Второй способ построения имеет то преимущество, что выделяетнеобходимое и достаточное для управления количество элементов входных
воздействий и понижает размерность системы по входам.
Пример:
0
1
A
0
0
0 0 24
0 0 50
;
1 0 35
0 1 10
1
1
B
0
0
0
0
;
1
0
0 1 0 1
C
;
0 0 1 1
b1 b 2 Ab 1 Ab 2 A 2 b1 A 2 b 2 A 3 b1 A 3 b 2
MY
1
1
0
0
0
0
0
0
- 24
- 24
0
1
1
1
0
0
0
1
- 50
- 35
- 50
- 35
1
- 10
-9
0
0
1
240
476
300
65
76.
31
1
PRU
b1 Ab1 A 2 b1 | b 2
или
b1
Ab 1 | b 2 Ab 2
2
1
ARU PRU APRU
2
1 | 0
0 0 - 24 | 0
0 | 0
1 0 - 26 | 0
0 1 - 9 | 1 ; BRU 0 | 0 ;
|
- - - - - - - -- | - - -
0 | 1
0 0
0 | - 1
1 1 1 | 0
C - - - - - | - -
0 1 2 | 1
При построении системы управления чаще приходится использовать ДНС
и построив ДНС необходимо помнить, что схема получена в
соответствующем базисе, отличным от того в котором построено
управление, поэтому после расчета ДНС и формирования модального
управления, необходимо привести модели к общему базису.
77.
Возможности систем обратных связей для многовходовыхобъектов.
Примеры построения многовходовых объектов с использованием
разделяющих преобразований.
Пример №1
- необходимо построить модальное управление объектом,
разделенным на подсистемы в предыдущем примере.
AC A BK
1
0
B
0
0
BK
0
0 k11 k12
0 k 21 k 22
1
BK AC A
- матрица
k13
k 23
k11 k12 k13 k14
0 0 0 0
k14
0 0 0 0
k 24
k 21 k 22 k 23 k 24
78.
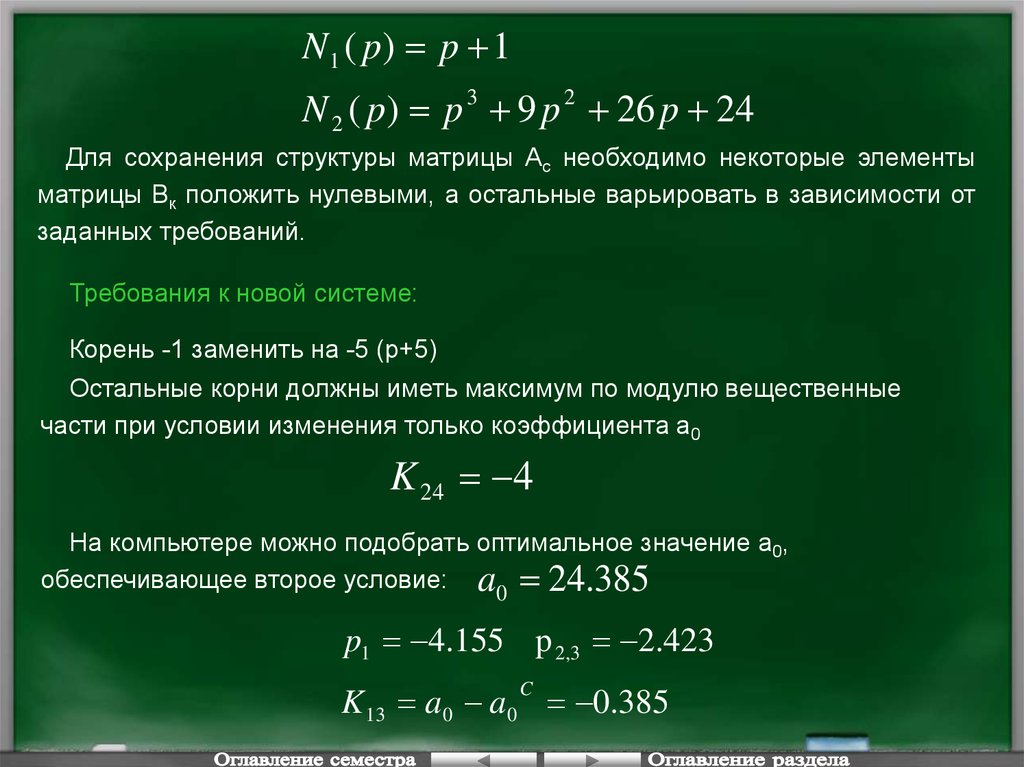
N1 ( p) p 1N 2 ( p) p 3 9 p 2 26 p 24
Для сохранения структуры матрицы Ас необходимо некоторые элементы
матрицы Вк положить нулевыми, а остальные варьировать в зависимости от
заданных требований.
Требования к новой системе:
Корень -1 заменить на -5 (p+5)
Остальные корни должны иметь максимум по модулю вещественные
части при условии изменения только коэффициента а0
K 24 4
На компьютере можно подобрать оптимальное значение а0,
обеспечивающее второе условие: a0 24.385
p1 4.155 p 2,3 2.423
K 13 a 0 a 0 0.385
C
79.
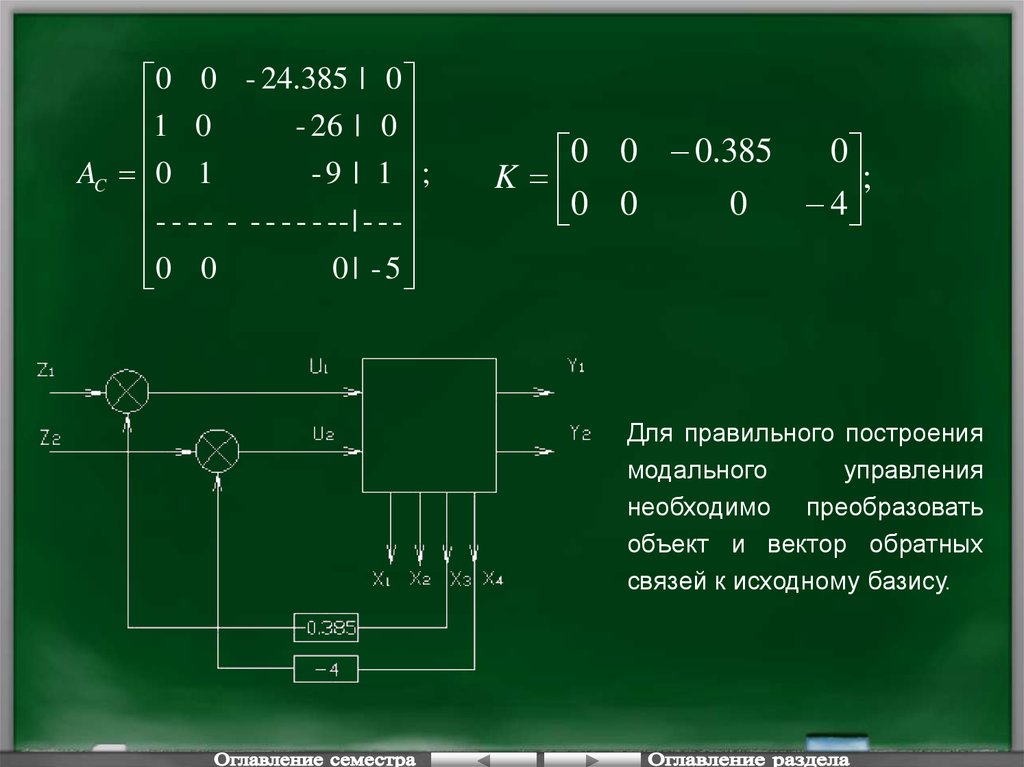
0 0 - 24.385 | 01 0
26
|
0
AC 0 1
-9 | 1 ;
-|
0 0
0 | - 5
0
0 0 0.385
K
;
0
4
0 0
Для правильного построения
модального
управления
необходимо преобразовать
объект и вектор обратных
связей к исходному базису.
80.
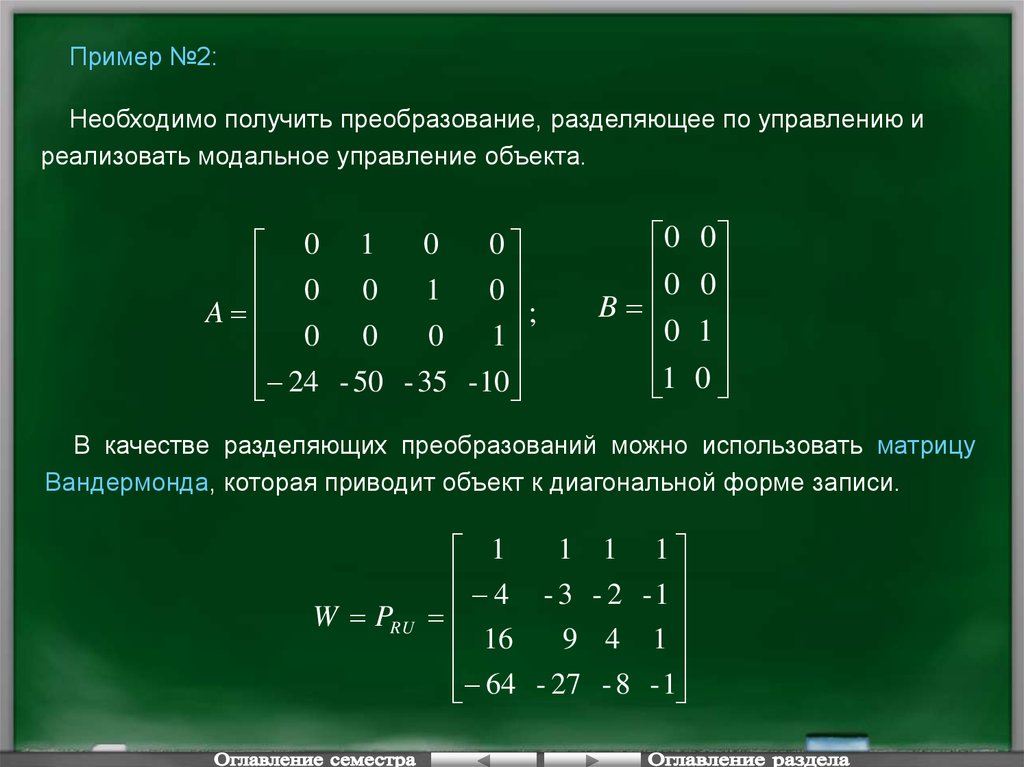
Пример №2:Необходимо получить преобразование, разделяющее по управлению и
реализовать модальное управление объекта.
0
0
0 1
0 0
1
0
;
A
0 0
0
1
24
50
35
10
0
0
B
0
1
0
0
1
0
В качестве разделяющих преобразований можно использовать матрицу
Вандермонда, которая приводит объект к диагональной форме записи.
W PRU
1 1
1
4 -3 -2
16
9 4
64 - 27 - 8
1
- 1
1
- 1
81.
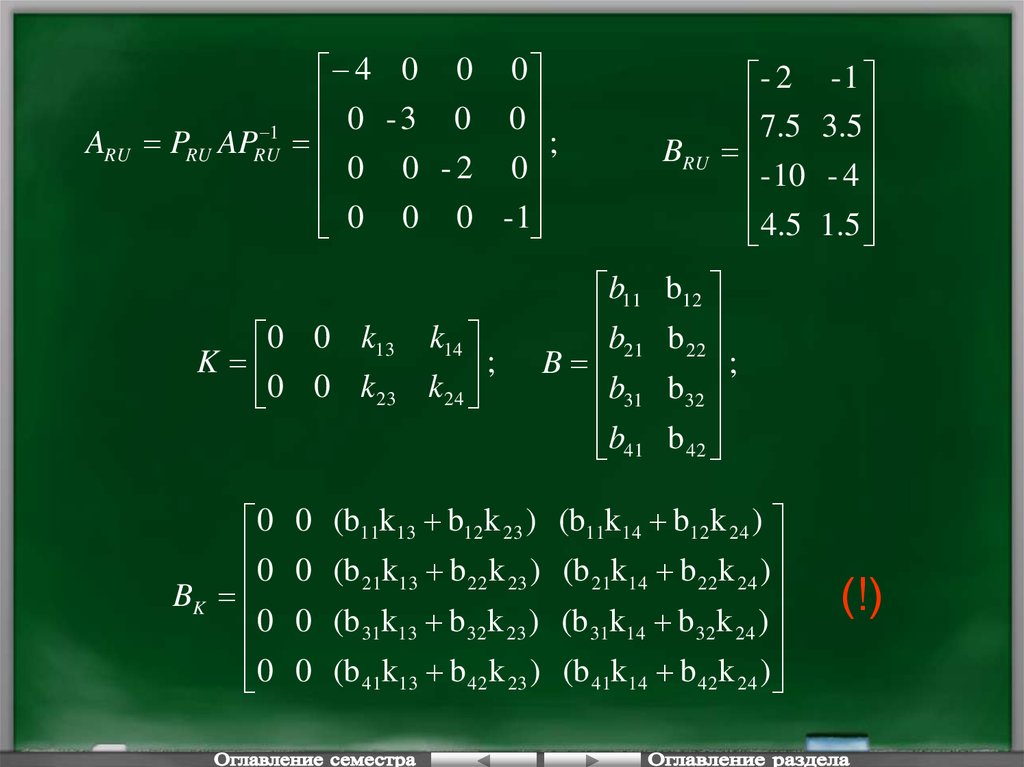
1ARU PRU APRU
4
0
0
0
0
0
;
0
0 - 1
0 0
-3 0
0 -2
0
0 0 k13 k14
K
;
0 0 k 23 k 24
0
0
BK
0
0
b11
b
21
B
b31
b41
BRU
- 2
7.5
- 10
4.5
-1
3.5
- 4
1.5
b12
b 22
;
b 32
b 42
0 (b11k13 b12k 23 ) (b11k14 b12k 24 )
0 (b 21k13 b 22k 23 ) (b 21k14 b 22k 24 )
0 (b 31k13 b 32k 23 ) (b 31k14 b 32k 24 )
0 (b 41k13 b 42k 23 ) (b 41k14 b 42k 24 )
(!)
82.
RUC
A
4 * * 0
0 -3 * *
;
0 0 - 6 *
0 0 0 - 5
b 31k13 b 32k 23 6 2 4
b 41k14 b 42k 24 5 1 4
b 41k13 b 42k 23 0
b11k14 b12k 24 0
C
B K ARU
ARU
10k13 4k 23 4
4.5k 1.5k 4
14
24
;
4.5k13 1.5k 23 0
2k14 k 24 0
k13 2;
k14 2.667;
k 23 6;
k 24 5.333;
0 0 2 2.667
K
0
0
6
5
.
337
;
83.
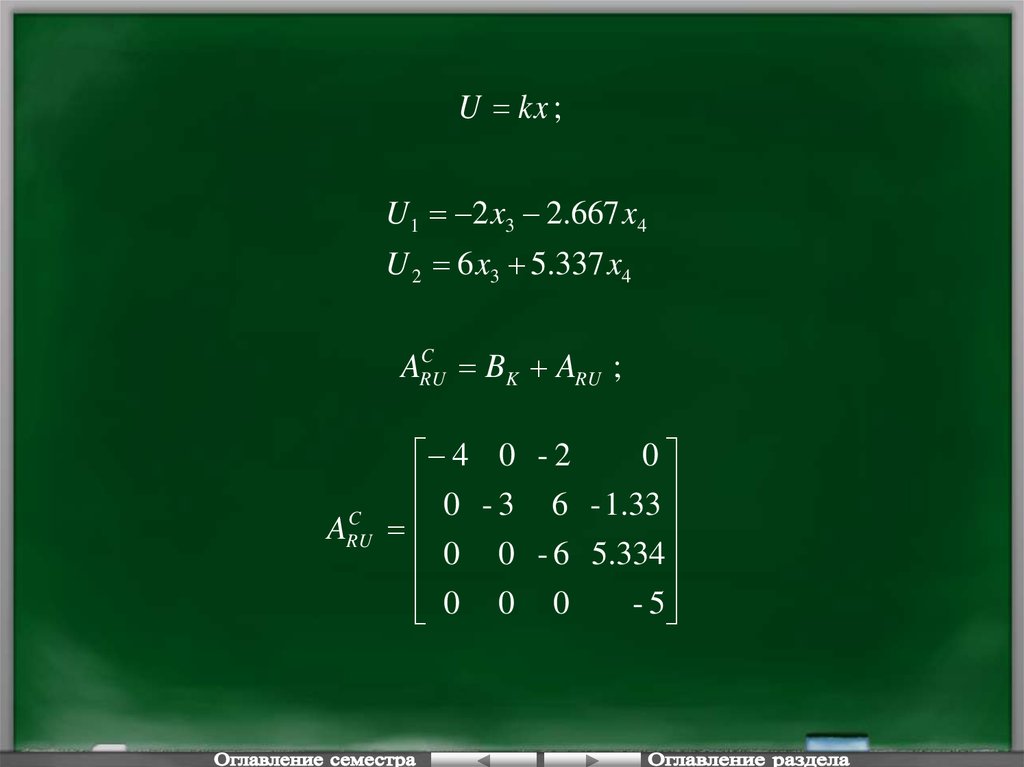
U kx ;U1 2 x3 2.667 x4
U 2 6 x3 5.337 x4
C
ARU
BK ARU ;
C
ARU
4
0
0
0
0 -2
0
- 3 6 - 1.33
0 - 6 5.334
0 0
- 5
84.
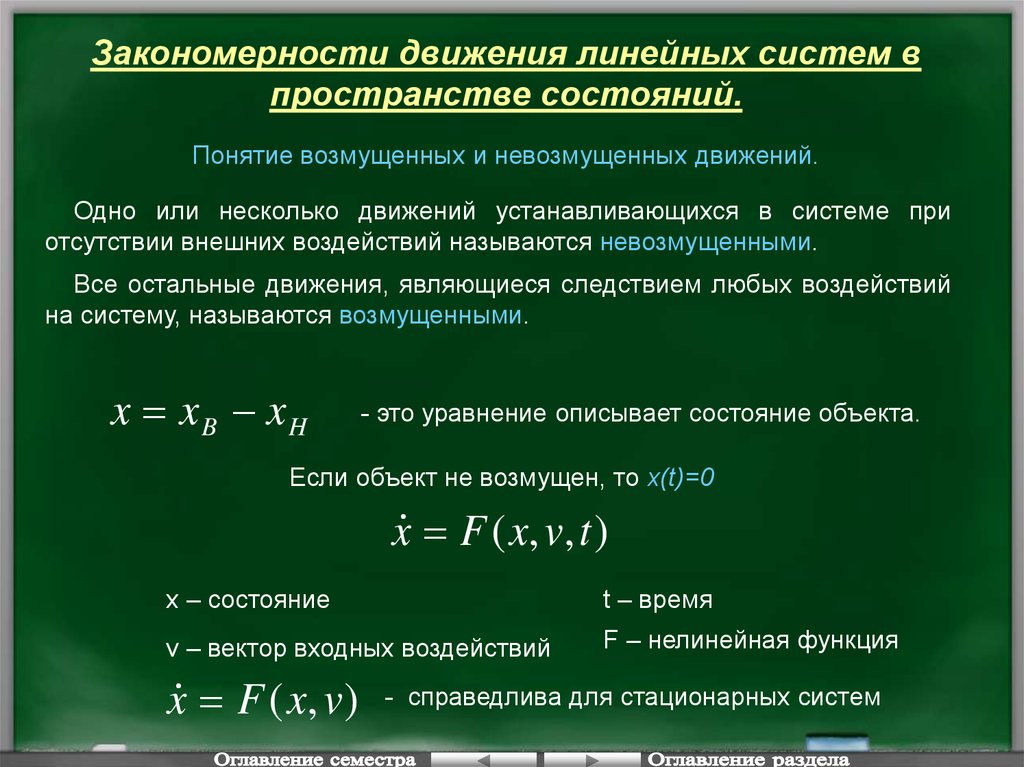
Закономерности движения линейных систем впространстве состояний.
Понятие возмущенных и невозмущенных движений.
Одно или несколько движений устанавливающихся в системе при
отсутствии внешних воздействий называются невозмущенными.
Все остальные движения, являющиеся следствием любых воздействий
на систему, называются возмущенными.
x xB xH
- это уравнение описывает состояние объекта.
Если объект не возмущен, то x(t)=0
x F ( x, v, t )
х – состояние
t – время
v – вектор входных воздействий
F – нелинейная функция
x F ( x, v )
- справедлива для стационарных систем
85.
Для анализа свойств стационарных систем, обязательным условиемявляется задание начального состояния объекта, которые называются
начальными условиями.
x(t0 ) x x ...
0
1
0
2
Ненулевые начальные условия движения исследования объекта
называются возмущениями.
Возмущенные движения системы на некотором интервале времени в
отсутствии влияния внешних воздействий называются свободными
движениями объекта.
Аналогичное движение при наличии воздействий называется вынужденным.
86.
В практике теории управления распространенным является случай, когдапеременные состояния связаны между собой выражением:
x i xi 1
87.
В этом случае переменные состояния принято называть фазовымикоординатами, траектории – фазовыми. Часто для наглядности эти
траектории отображают на плоскости. Изображение сечения фазовой
траектории на плоскости называется портретом.
Положение
равновесия
исследуемого
объекта
соответствует
равенство нулю
всех производных:
dxx
0,
dt
(i 1, n) означающее
прекращение движения по всем
переменным
0
состояния.
Такая
точка называется особой. У всех
линейных систем такая точка одна
– начало координат. У нелинейных
x i f ( xi ), f i ( x) 0,
где
fi
- нелинейная функция.
88.
Свободные движения в линейной динамической системе.x Ax Bu
(1)
Для оценки свободного движения объекта
необходимо принять уравнение равным нулю, тогда
система превратится в однородное уравнение
x Ax
(2)
Динамическая система, описываемая уравнением
(1), при условии U(t)=0 называется автономной
системой.
Матрица Х(t), [n x n] называется фундаментальной для системы (2)
когда ее столбцы образованы линейно независимыми решениями этой
системы
(det X (t ))
- называется определителем Вронского.
89.
Свойства фундаментальной матрицы:1) Должна быть не особенной, т.е. определитель Вронского не должен
обращаться в ноль;
.
2) Должна удовлетворять уравнению X (t ) AX (t )
Если матрица X(t) неособенная и удовлетворяет решению данной системы,
то она является фундаментальной.
Если Х(t) есть фундаментальная матрица, то
называется переходной матрицей.
Ф (t , t 0 ) X (t ) X 1 (t 0 )
На основании свойств фундаментальной матрицы дать свойства
переходной матрице:
1)
Ф (t , t 0 ) X (t 0 ) X (t 0 ) 1 E
3)
Ф 1 (t , t 0 ) Ф ( t 0 , t )
2) Для каждого t t 0 , t1 Ф(t , t 0 ) 0
4) Переходная матрица представляет собой фундаментальную, построенную
для единичных начальных условий
X (t ) E
0
90.
Поэтому переходную матрицу можно определить как решение матричногоуравнения:
Ф / (t , t 0 ) AФ(t , t 0 )
Ф(t 0 , t 0 ) E
Если х0 - вектор произвольных не нулевых начальных условий,
то решение системы можно найти по следующей формуле:
x Ф(t , t 0 ) x0
Определение переходной матрицы и ее свойств относятся к системам,
описываемыми ДУ с постоянными и переменными коэффициентами.
91.
Так как в данном разделе рассматриваются объекты и системы спостоянными коэффициентами, то для более подробного анализа свойств
переходной матрицы рассмотрим линейное однородное ДУ первого порядка:
x dx
В соответствии со свойствами переходной матрицы, это одно из решений
матричного ДУ, обращающееся в единичную матрицу каждый раз, когда
элементы t и t0 равны руг другу. В случае системы первого порядка
переходная матрица вырождается в скалярную функцию.
Следовательно роль переходной матрицы играет решение равное (1).
x(t , t 0 )
при t = t0
x (t , t 0 ) e
( t t0 )
(3)
92.
По аналогии с экспонентной (3) можно ввести понятия матричногоэкспоненциала, для этого можно использовать разложение экспоненты в ряд
по степеням разности :
e
( t t 0 )
(t t0 ) 2 (t t0 ) 2
k (t t0 ) k
1
...
1!
2!
k!
k 0
Если в этой формуле α заменить на матрицу А, то получится некоторая
функциональная матрица, которая и называется матричным экспоненциалом:
e A ( t t0 )
A(t t 0 ) A 2 (t t 0 ) 2
A k (t t 0 ) k
E
...
1!
2!
k!
k 0
(4)
Переходной матрицей системы (1) является матричный экспоненциал,
определенный равенством (4).
93.
Таким образом можно записать еще несколько свойств переходной матрицы,вытекающих из понятия матричного экспоненциала:
а) если системная матрица А – постоянная, то
б) если А – скаляр и А=α, то
в)
Ф (t , t0 ) e
Ae A( t t0 ) e A( t t0 ) A
A ( t t0 )
At At0
e e
Ce
At
г)
e
д)
det Ф (t , t0 ) e t spA
е)
Ф(t , t0 ) Ф(t , t1 ) Ф(t1 , t0 )
Ф (t , t 0 ) e A ( t t 0 )
( t t 0 )
94.
Вынужденные движения в линейных динамическихсистемах.
Если математическая модель объекта описывается неоднородной
системой уравнений
x Ax Bu
то для получения ее решения можно воспользоваться переходной матрицей
вида (4), которая позволяет найти это решение методом варьируемых
постоянных интегрирования (метод Лагранжа).
Теорема:
Если Φ(t,t0) есть переходная матрица объекта, то единственное решение
системы уравнений, при x(t0)=x0 задается формулой
t
x (t ) e A( t t 0 ) x0 e A( t ) Bu ( ) d
t0
(5)
95.
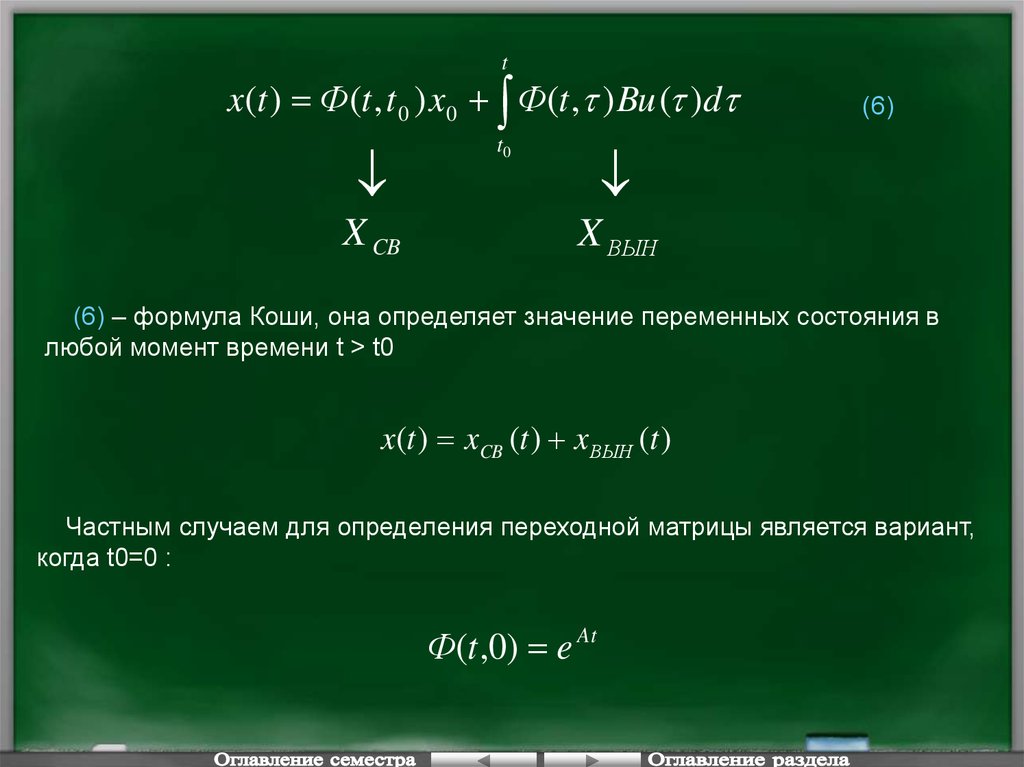
tx(t ) Ф(t , t 0 ) x0 Ф(t , ) Bu ( )d
X CB
t0
(6)
X ВЫН
(6) – формула Коши, она определяет значение переменных состояния в
любой момент времени t > t0
x(t ) xCB (t ) x ВЫН (t )
Частным случаем для определения переходной матрицы является вариант,
когда t0=0 :
Ф(t ,0) e At
96.
Наиболее часто решение для переходной матрицы находится с помощьювыражения (4), но существуют и другие подходы.
Пусть объект описывается неоднородным ДУ.
Применим к уравнению
x Ax Bu
Преобразование Лапласа при нулевых начальных условиях:
px x(0) Ax( p ) Bu ( p )
( pE A) x( p ) x(0) Bu ( p )
x( p ) ( pE A) 1 x(0) ( pE A) 1 Bu ( p )
t
1
x(t ) {( pE A) }x(0) L 1{( pE A) 1}Bu ( )d
0
Ф(t ,0) L 1{( pE A) 1}
(7)
97.
Пример:1k
0
k
А
0
Для получения переходной матрицы через разложение в ряд
удобно использовать КД форму записи, т.к. для нее легко
вычислить любые степени.
0
k21
t ,0 e At
откуда
0
0
0
k
n
1
0
0
Подставляя в последнее выражение формулу (4),
при t0 = 0 получим:
1 t 0
0 0
1 0 1 0 2 t
1!
0 1
0
0
e At
e 1t
0
0
nt
e
0
e 2t
0
12 t 2
1
0
2!
n t
0
0
0
0
0
2n t 2
0
22 t 2
0
0
0
AКД PAP 1
A P 1 AКД P
Ф(t ,0) P 1ФКД (t ,0) P
98.
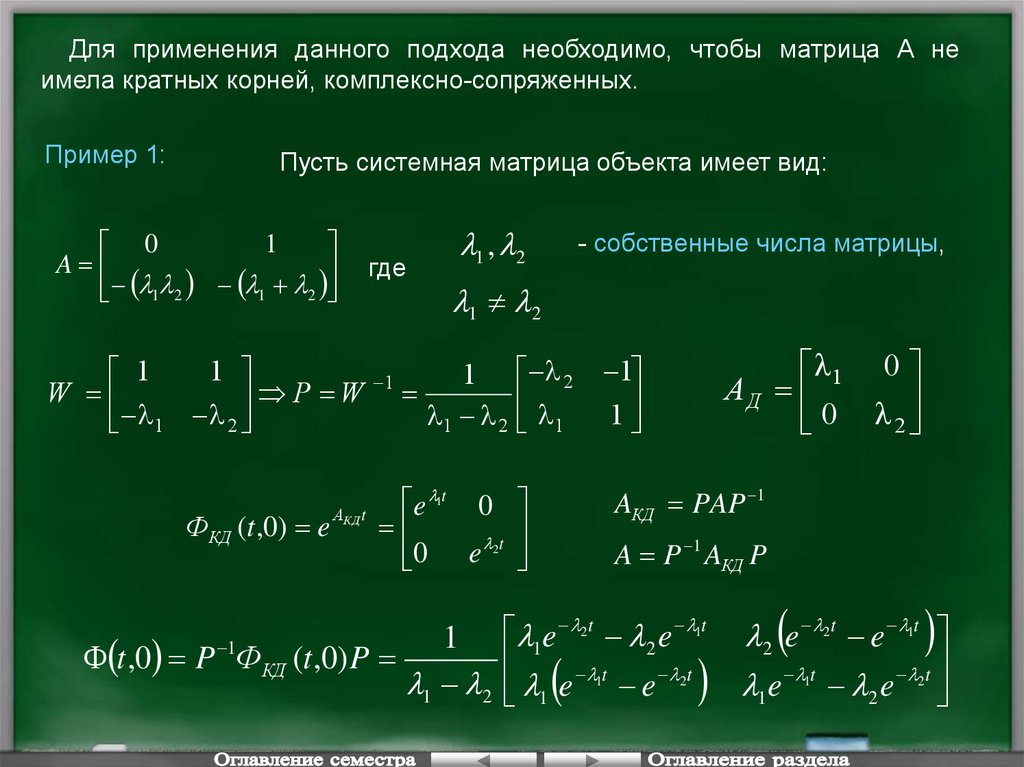
Для применения данного подхода необходимо, чтобы матрица А неимела кратных корней, комплексно-сопряженных.
Пример 1:
Пусть системная матрица объекта имеет вид:
1
0
A
1 2 1 2
1
1
W
P W
1 2
ФКД (t ,0) e
АКД t
где
1
1 , 2
- собственные числа матрицы,
1 2
1 2
1 2 1
AКД PAP 1
e 1t 0
2 t
0 e
1
1
t ,0 P ФКД (t ,0) P
1 2
1 0
AД
0 2
1
1
A P 1 AКД P
1e 2t 2 e 1t
1t
2 t
e
e
1
2 e t e t
t
t
1e 2 e
2
1
1
2
99.
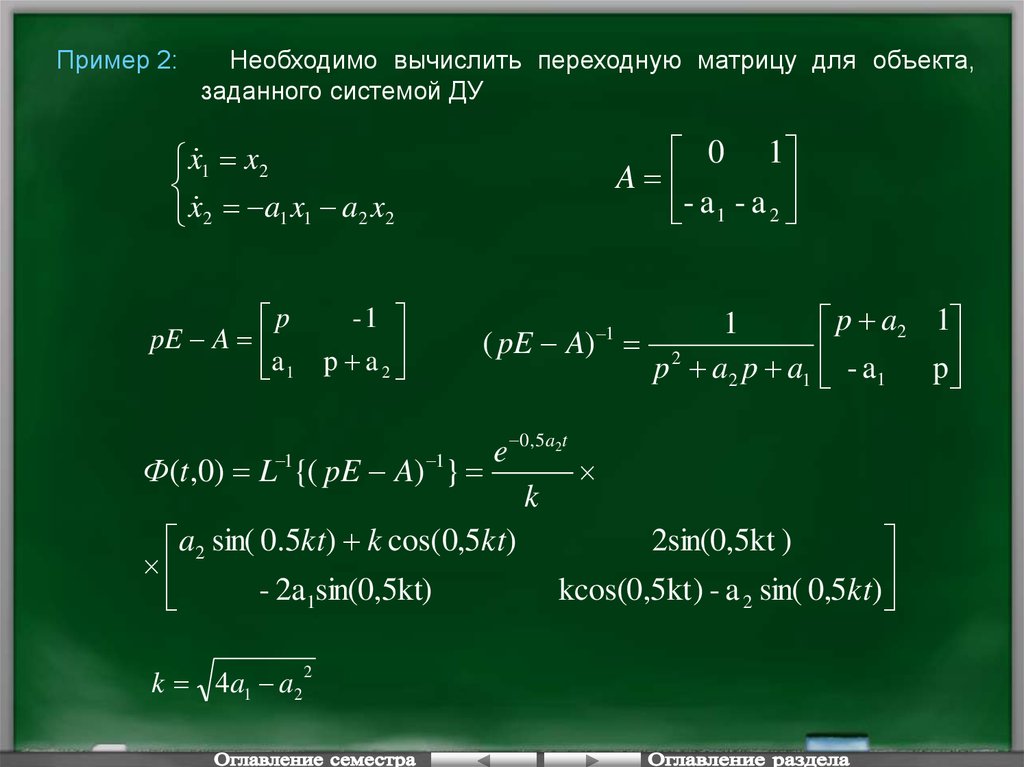
Пример 2:Необходимо вычислить переходную матрицу для объекта,
заданного системой ДУ
0 1
A
a
a
1 2
x 1 x2
x 2 a1 x1 a2 x2
p
pE A
a 1
-1
p a 2
p a2 1
1
( pE A) 2
p a2 p a1 - a1 p
1
0 , 5 a2t
e
Ф(t ,0) L 1{( pE A) 1}
k
2sin(0,5kt )
a2 sin( 0.5kt) k cos(0,5kt)
2a
sin(0,5kt)
kcos(0,5kt
)
a
sin(
0
,
5
kt
)
1
2
k 4a1 a2
2
100.
Оценка устойчивости состоянияавтоматических систем
по матрично-векторной модели.
Понятие устойчивости в пространстве состояний.
Оценка устойчивости объектов и систем по вход-выходным критериям
является производной от более общей и фундаментальной оценки
устойчивости для систем в пространстве состояний. Для произвольных
систем (линейных, нелинейных, в полных и частных производных,
стационарных и нестационарных) является очень сложной задачей, иногда
не решаемой.
Понятие устойчивости является относительным, по своей природе любой
объект является физически устойчивым (техническая устойчивость).
В то же время по управляемой входной переменной он может быть
неустойчивым, при этом при рассмотрении объектов и измерений может
рассматриваться как устойчивый, так и неустойчивый, потому говорят не об
устойчивости объекта, а устойчивости движения.
101.
Для определения большинства понятий устойчивости обычно используютn
конечномерное евклидово пространство состояния
R
Для общего понятия определения устойчивости назначим 2 множества:
1) Множество начальных состояний
G0 R n
2) Множество конечных состояний
Gk
Gk в общем случае также задается в Rn и времени t. Его элементы обычно
удовлетворяют уравнению движения объекта и системы.
Область G0 обычно имеет ту же размерность, что и пространство
состояний (n), область Gk (<n), но в некоторых случаях размерности могут
совпадать.
102.
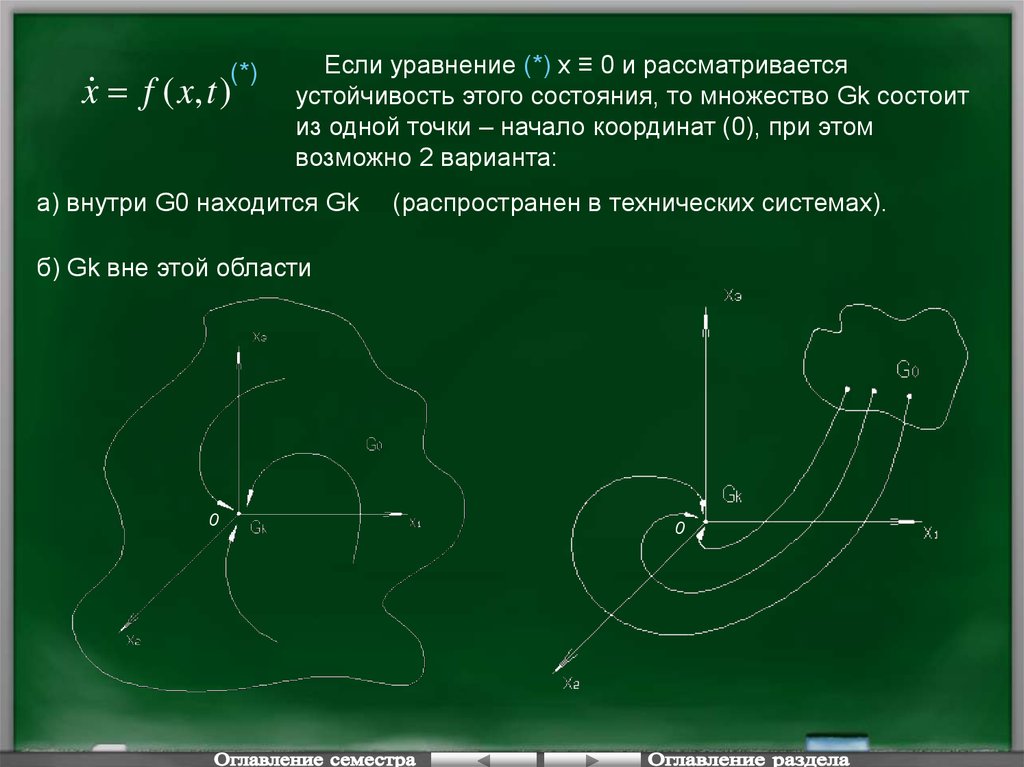
(*)x f ( x, t )
Если уравнение (*) x ≡ 0 и рассматривается
устойчивость этого состояния, то множество Gk состоит
из одной точки – начало координат (0), при этом
возможно 2 варианта:
а) внутри G0 находится Gk
(распространен в технических системах).
б) Gk вне этой области
0
0
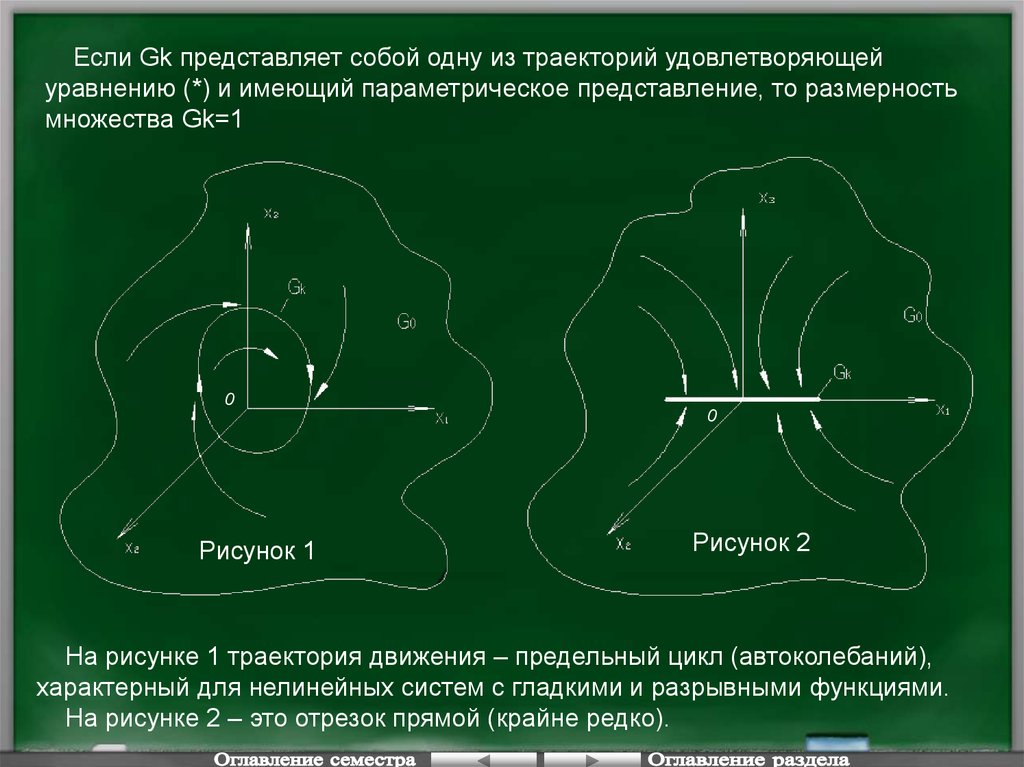
103.
Если Gk представляет собой одну из траекторий удовлетворяющейуравнению (*) и имеющий параметрическое представление, то размерность
множества Gk=1
0
0
Рисунок 1
Рисунок 2
На рисунке 1 траектория движения – предельный цикл (автоколебаний),
характерный для нелинейных систем с гладкими и разрывными функциями.
На рисунке 2 – это отрезок прямой (крайне редко).
104.
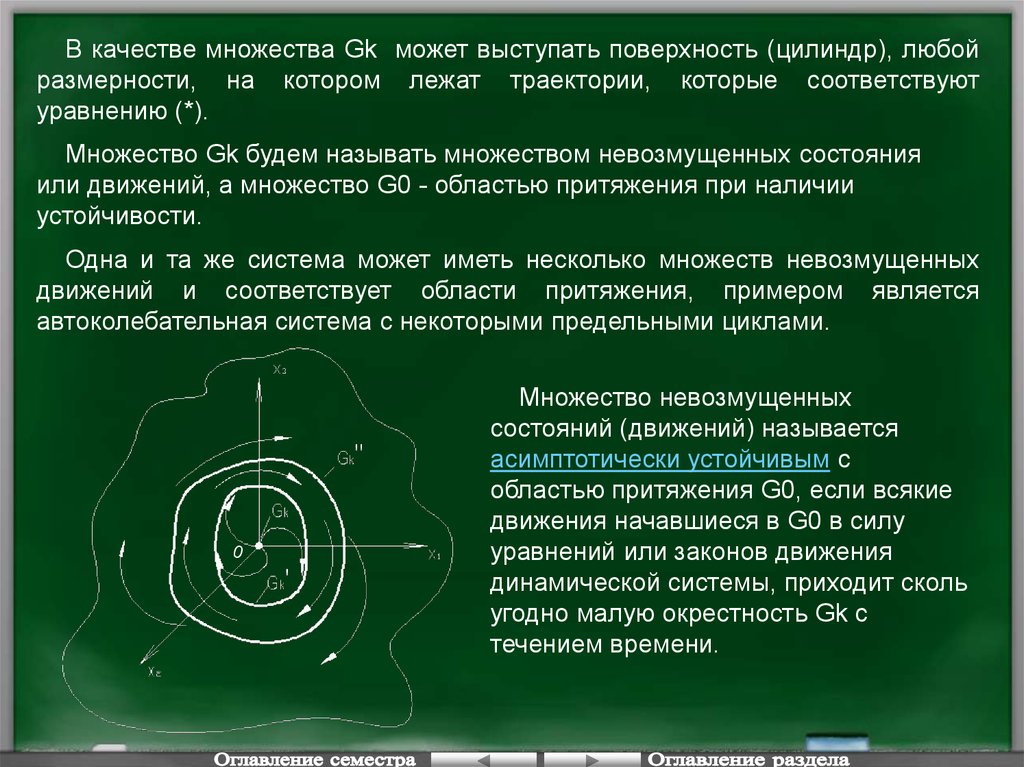
В качестве множества Gk может выступать поверхность (цилиндр), любойразмерности, на котором лежат траектории, которые соответствуют
уравнению (*).
Множество Gk будем называть множеством невозмущенных состояния
или движений, а множество G0 - областью притяжения при наличии
устойчивости.
Одна и та же система может иметь несколько множеств невозмущенных
движений и соответствует области притяжения, примером является
автоколебательная система с некоторыми предельными циклами.
0
Множество невозмущенных
состояний (движений) называется
асимптотически устойчивым с
областью притяжения G0, если всякие
движения начавшиеся в G0 в силу
уравнений или законов движения
динамической системы, приходит сколь
угодно малую окрестность Gk с
течением времени.
105.
Если множество G0 охватывает все пространство состояний или некоторуюобласть, ограниченную для данной системы, то соответствующую
устойчивость называется устойчивостью в целом.
- норма вектора состояний x
x
Служит мерой возмущенного движения
x 1 max x i
x
2
xi
x3
i
x
i
i
2
106.
Оценка устойчивости по Ляпунову.Основополагающий подход к оценке устойчивости связан с рассмотрением
невозмущенных движений, для ее оценки нужно доказать, что возмущенное
движение в окрестности ограниченно
по возрастанию переменных в
пространстве состояний.
Определение. Невозмущенное движение называется устойчивым по
Ляпунову, если для любого положительного
числа
, как бы
мало оно ни было, можно найти
некоторое число
, такое, что из неравенства
x(t0 ) для каждого
t 0 x(t) , где t 0 - фиксированный начальный момент времени.
Устойчивость по Ляпунову называют малой или локальной устойчивостью.
107.
Определение.Движение
и
соответственно его равновесное
положение, устойчивое по Ляпунову
и
отвечающее
дополнительному
относительно
предыдущего
определения свойству lim x (t ) 0
0
t
называется
асимптотически
устойчивым.
Устойчивые линейные системы
всегда являются асимптотически
устойчивым .
0
Здесь
подменяется , т.е.
x t0
x t 0
при
t
108.
Примеры движений различных систем1)
Странный аттрактор
.
10;
z ( y z)
28;
.
8
y z y xz
x yx x u 3
2)
Консервативное звено (генератор
синусоидальных колебаний)
x 1 x 2 ;
x 2 ax1 ku;
0 1
A1
a 0
0
109.
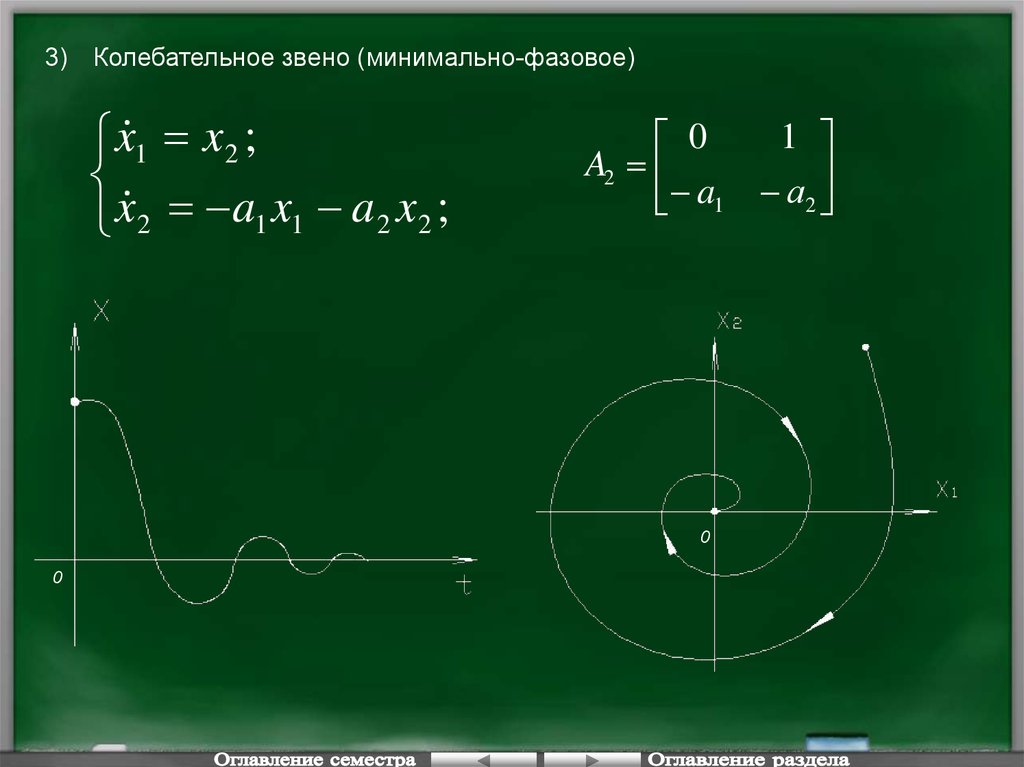
3)Колебательное звено (минимально-фазовое)
x 1 x 2 ;
x 2 a1 x1 a 2 x 2 ;
1
0
A2
a
а
2
1
0
0
110.
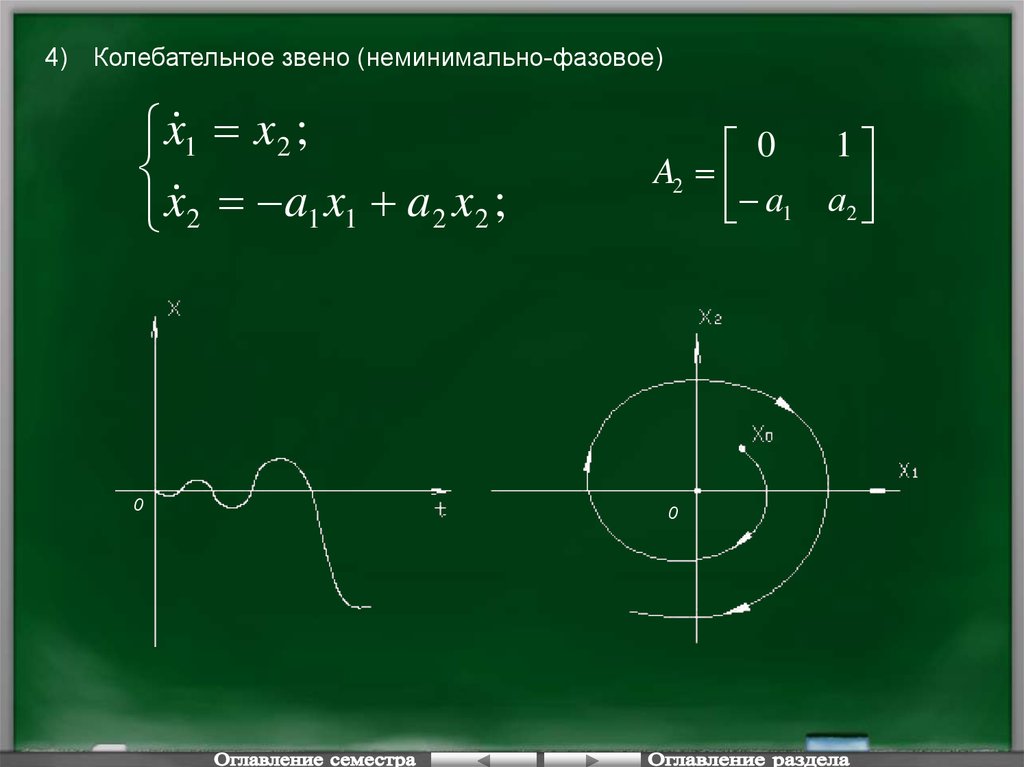
4)Колебательное звено (неминимально-фазовое)
x 1 x 2 ;
x 2 a1 x1 a 2 x 2 ;
0
1
0
A2
a
а
1 2
0
111.
Оценка устойчивости по переходной матрице.Для оценки устойчивости достаточно анализировать только собственные
движения объекта или системы.
При исследовании x(t ) Ф(t , t 0 ) x(t 0 ) возможно три случая:
1) Переходная матрица является ограниченной: для каждого
t t0 Ф(t , t.0 ) M 0 , если переходная матрица ограничена, то можно
2
показать, что x(t ) n M MAX xi (t ) если
,то будет выполняться
2
n M
условие устойчивости по Ляпунову.
2) Переходная матрица – асимптотически затухающая функция времени
lim (t , t0 ) 0 , т.е.
t
второй
устойчивости.
случай
соответствует
асимптотической
3) Неограниченная матрица, т.е. в ней есть хотя бы один элемент, который
неограничен на интервале времени t [t0 ; ] , т.е. движение того элемента
является расходящимся – неустойчивое движение.
112.
Оценка устойчивости по спектру линейной системной матрицы.1) Объект является устойчивым по Ляпунову, если выполняется условие:
Re i A 0, i 1, n
2) Неустойчивым, если условие следующее:
Re i A 0, i 1, n
3) Является асимптотически устойчивым, если
Re i A 0, i 1, n
Доказательством этих условий является решение однородных уравнений по
At
формуле Коши: x( t ) e x 0
113.
Оценка устойчивости замкнутых системс использованием функции Ляпунова.
Основные понятия и определения.
Ляпунов предложил исследовать устойчивость движения с помощью
специальных знакоопределенных функций, которые называются функцией
Ляпунова.
Функция Ляпунова
V x ,t
- это непрерывная вещественная функция,
определенная в n-мерном пространстве
Rn
,имеющая определенный знак,
непрерывные частные производные в области
начале координат. Другими словами,
x S (R )
x R
и равная нулю только в
- шаг радиуса R.
Для оценки устойчивости функции Ляпунова необходимо знать понятия
знакоопределенности функции.
Функцию
V x ,t
назовем определенно положительной в области (*),
если всюду в этой области, кроме начала координат, имеет смысл неравенство
V x, t 0. Если же выполняется неравенство V x, t 0 , то функция V x ,t
называется определенно отрицательной (общее название - функция
знакоопределенная).
114.
Если в области (*) имеет место всюду неравенствоV x ,t 0 или V x, t 0 ,
то функция называется знакопостоянной.
К примеру функция V x12 x 22 x32 определенно положительной , функция
V x12 x 22 будет знакопостоянной в пространстве R 2 . Функция V x12 x 22
является определенно отрицательной в пространстве R 2 .
Теорема 1: (об устойчивости)
Если для системы x F ( x, t ) (**) существует в области R знакопостоянная
функция V(x,t), производная которой по времени, взятая в силу системы (**),
является знакопостоянной функцией знака, противоположного знаку функции
V(x,t), то положение равновесия устойчиво в смысле Ляпунова.
Теорема 2: (об асимптотической устойчивости)
Если для системы (**) существует знакоопределенная функция V(x,t), полная
производная которой по времени, найденная в силу системы (**), будет также
знакоопределенной, знака противоположного с V(x,t), то положение равновесия
будет асимптотически устойчивым.
115.
Исследования устойчивости с помощью функции Ляпунова получилоназвание второго (прямого) метода Ляпунова.
В соответствии с представленными теоремами для оценки устойчивости
можно
построить
знакоопределенную
функцию
и
убедившись
в
отрицательной определенности ее производной доказать неустойчивость.
Построение функции Ляпунова на основе матрично-векторной модели.
Наибольшее распространение получила квадратичная форма функции Ляпунова:
V ( x, t ) xT Qx
Q - положительно определенная симметричная матрица n n.
Условие определенной положительности квадратичных форм задается
неравенствами Сильвестра, согласно которых, проверка знакоопределенности
функций Ляпунова делается очень легко.
Считается что
V ( x, t ) 0 если собственные числа матрицы Q положительны.
V x q11 x1 x1 q12 x1 x2 qnn xn xn
n
q
i ,k 1
xx
ik i k
116.
q11 q12 q1nq
x1
q11 q12
q
q
21
22
2
n
x n 2 Q
Q
x
q
q
22
2
21
qn1 qn 2 qnn
q11 q12 x1
V ( x, t ) x1 x 2
q11 x1 x1 q12 x1 x 2 q 21 x 2 x1 q 22 x 2 x 2
q 21 q 22 x 2
q11 x12 2q12 x1 x 2 q 22 x 22
Т.к. функция Ляпунова
V ( x, t ) в n-мерном пространстве, то она является
функцией n-переменных, которые зависят от времени, поэтому производная
по времени от функции квадратичной формы определяется как производная
от сложной функции.
V ( x, t ) x T Qx xT Qx ( Ax)T Qx xT QAx xT AT Qx xT QAx
xT ( AT Q QA) x xT Lx ;
AT Q QA L - уравнение Ляпунова (***),
где L – положительно определенная матрица.
117.
Теорема Ляпунова для линейных систем.Для того, чтобы системная матрица A принадлежала устойчивой системе
необходимо и достаточно, чтобы полученное уравнение (***) имело
положительно определенное решение при любой «+» определенности
матрицы L.
Таким образом, задавшись любой положительно определенной матрицей L ,
можно построить функцию Ляпунова (для линейных систем с устойчивой
матрицей A (***) существует всегда).
1)
LT L, т.е. она является симметричной
2)
L Q наблюдается взаимно-однозначное
При построении функции Ляпунова рекомендуется задавать матрицу L в
диагональной форме записи, по диагонали стоят собственные числа,
определяется знак матрицы, а выше и ниже диагонали нули, определяющие
симметричность матрицы.
118.
В MatLab это функция - lyap(A,L)0 1 0
А 0 0 1 ;
- 6 - 11 - 6
2.7167
Q lyap ( A, L) 2.3
0.0833
1 0 0
L 0 2 0 ;
0 0 3
2.3
5.0167
0.3
0.0833
0.3
0.3
V ( x, t ) 2.7167 x12 5.0167 x 22 0.3 x32 4.6 x1 x 2 0.1666 x1 x3 0.6 x 2 x3
.
V ( x, t ) 1x12 2 x 22 3 x32 0.008 x1 x 2 0.0004 x1 x3
т.к. функция Ляпунова является определенной положительной, а ее
производная определенно отрицательной, то согласно теореме Ляпунова
система является асимптотически устойчивой.
119.
Оценка качества переходных процессовс использованием функции Ляпунова.
Оценка времени затухания возмущенного движения.
Функция Ляпунова наряду с основной задачей получения достаточных
условий
устойчивости могут использоваться также для оценки отдельных показателей
качества, т.е. качества собственных движений замкнутой системы.
X 2 QX
Q
Q , Q
X
2
X T QX
Q
- наименьшее и наибольшее собственные числа матрицы Q.
После дифференцирования, интегрирования и экспонирования получится
неравенство вида:
V0
Q
e
t
Q
X
2
V0
Q
e
t
Q
(*.1)
t – время;
V0
- значение функции Ляпунова для определенных начальных условий.
120.
Из выражения (*.1) следует верхняя оценка времени затухания переходногопроцесса, как время достижения и не выхода за
Если в выражении (*.1) вместо х подставить
- окрестность.
, можно получить оценку
переходного процесса.
V0
Q
e
t
Q
2
Q 2
t Q ln
V0
(*.2)
Если требуется нижняя оценка времени затухания возмущенного движения,
то используют (*.1).
Выводы по использованию второго метода Ляпунова.
1) Является эффективным методом оценки устойчивости систем управления
без решения их математических моделей, даже в нелинейном случае,
а для линейных систем существуют регулярные алгоритмы построения
функции Ляпунова для системы линейного порядка.
121.
2) Функция Ляпунова заключает в себе значительную информацию окачественных показателях решения математических моделей системы,
в частности позволяет определить пределы затухания переходных процессов.
Пример: (применение прямого метода Ляпунова)
x 1 12 x 2 ;
x 2 21 x1 22 x 2 ;
т.к. система имеет второй порядок и является линейной, то можно
использовать квадратичную форму записи функции Ляпунова.
V ( x) q11 x12 q 22 x 22 2q12 x1 x 2
V ( x) 2q11 x1 x 1 2q 22 x 2 x 2 2q12 x1 x 2 2q12 x 1 x 2
V ( x) 2q11x1 12 x2 2q22 x2 ( 21 x1 22 x2 ) 2q12 x1 ( 21 x1 22 x2 )
2q12 12 x2 x2 2[( 12q11 22q22 ) x1 x2 q22 22 x22 q12 12 x12 q12 21 x12 ]
Для обеспечения положения определенности функции Ляпунова необходимо
взять
q12 0.
122.
V ( x) 2[( 12 q11 21q 22 ) x1 x 2 q 22 22 x 22 ]Для обеспечения отрицательной определенности производной функции
Ляпунова необходимо выполнить условие, т.е. приравнять коэффициенты,
которые мы имеем:
V ( x) 2q 22 22 x 22
(но дополнительным условием нужно, чтобы
q11 1 q 22
12 22 2
V ( x) 2
x2 ,
21
22- положительно)
12
0
21
12 22
0
21
(*.3) – условие обеспечения устойчивости для системы второго порядка.
123.
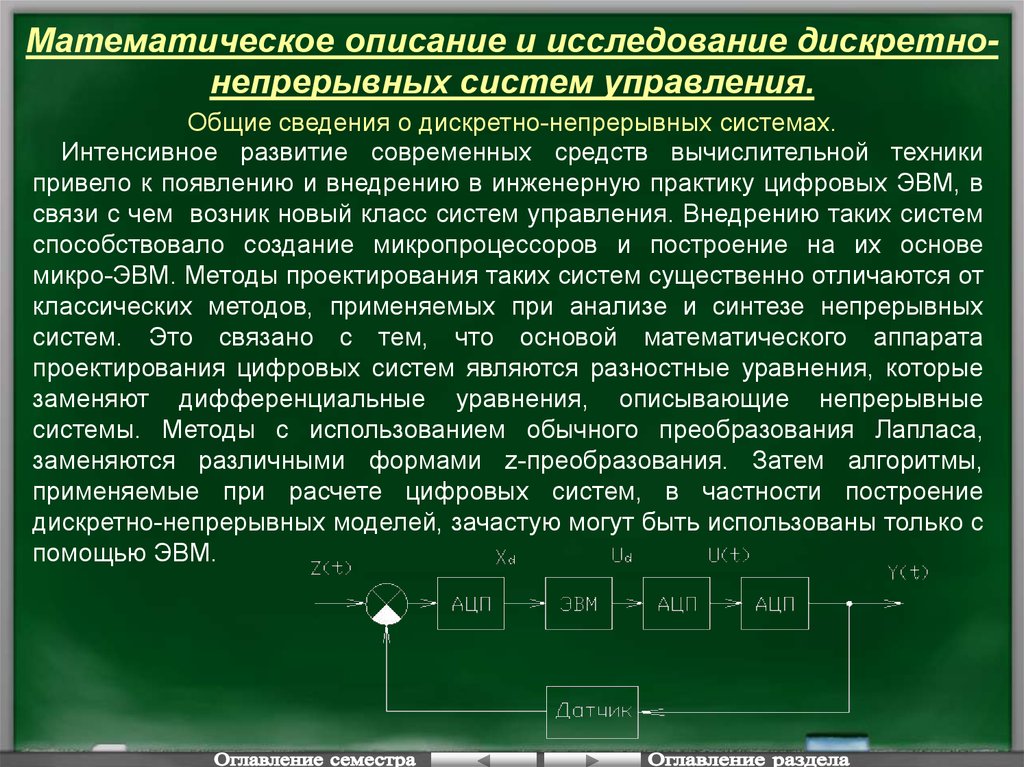
Математическое описание и исследование дискретнонепрерывных систем управления.Общие сведения о дискретно-непрерывных системах.
Интенсивное развитие современных средств вычислительной техники
привело к появлению и внедрению в инженерную практику цифровых ЭВМ, в
связи с чем возник новый класс систем управления. Внедрению таких систем
способствовало создание микропроцессоров и построение на их основе
микро-ЭВМ. Методы проектирования таких систем существенно отличаются от
классических методов, применяемых при анализе и синтезе непрерывных
систем. Это связано с тем, что основой математического аппарата
проектирования цифровых систем являются разностные уравнения, которые
заменяют дифференциальные уравнения, описывающие непрерывные
системы. Методы с использованием обычного преобразования Лапласа,
заменяются различными формами z-преобразования. Затем алгоритмы,
применяемые при расчете цифровых систем, в частности построение
дискретно-непрерывных моделей, зачастую могут быть использованы только с
помощью ЭВМ.
124.
Таким образом промышленная цифровая система управления всегдасодержит непрерывный (аналоговый) объект и дискретно работающее
устройство управления. Согласование этих разнообразно работающих
устройств осуществляется с помощью АЦП и ЦАП.
ДНСУ (дискретно-непрерывная система управления) такая система
содержит хотя бы один преобразователь аналогового сигнала в дискретную
форму.
Устройства, с помощью которых аналоговый сигнал преобразуется в
дискретный
называются
квантователями.
Процесс
преобразования
называется квантованием.
Квантование бывает трех типов:
1) по уровню;
2) по времени;
3) смешанное.
По форме представления квантованного сигнала в дискретном виде
различают:
1) импульсный;
2) релейный;
3)цифровой.
При этом импульсное квантование связано с квантованием по времени,
релейное - по уровню, смешанное - с цифровым.
125.
Иногда смешанное квантование приводит к тому, что после импульсногопредставления сигнала, он затем преобразуется в релейную форму (с помощью
фиксаторов или экстраполяторов).
Поскольку квантование производится через некоторые переменные или
постоянные промежутки времени, то квантованный сигнал представляется
последовательностью импульсов прямоугольной формы.
Формирование дискретного сигнала осуществляется посредством
пропускания непрерывного сигнала через ключ, который периодически, с
тактом квантования Т (период), замыкается на время , которое называется
длительностью импульса.
0
0
Одним из основных параметром дискретного сигнала является скважность:
126.
Любой из параметров импульсной последовательности порознь или вместеможет быть функцией измеряемого сигнала. Если
T= const, то процесс
квантования является синхронным, иначе - асинхронным. В зависимости от
того какой параметр
используется для информационного представления
системы различают типы модуляции: амплитудно-импульсную, широтноимпульсную и время-импульсную модуляцию.
Если длительность импульса существенно меньше Т, то последовательность
импульсов xd(t) можно рассматривать как дискретный сигнал.
0
0
Ключ действует как идеальный квантователь
127.
Причины построения дискретно-непрерывных систем управления:1)Появление ЭВМ и внедрение ее в технику управления.
2)Повышенная чувствительность, высокая надежность, отсутствие дрейфа,
высокая помехоустойчивость по сравнению аналоговыми, кроме того,
небольшие габариты и масса, низкая стоимость и удобство при
программировании.
3)Экономичность, связанная с высокой гибкостью по сравнению с
аналоговыми регуляторами, заключающаяся в изменении программноцифрового сигнала или адаптации к характеристикам цифрового управления
без каких-либо изменений в аппаратных средствах.
4)Возможность работы в режиме разделения времени (позволяет по одному
и тому же каналу передавать несколько различных сигналов).
5)В период между моментами квантования дискретная система движется как
разомкнутая, что упрощает анализ системы, особенно для нелинейных систем.
В период размыкания системы возможно решение различных фоновых
задач на ЭВМ.
128.
Получение матрично-векторных математических моделей ДНСУПусть матрично-векторная модель имеет вид:
(*)
Дискретизируем сигнал
129.
Последнее выражение по математической записи ничем не отличаются отисходного (*), кроме того, что в него входят дискретные управляющие
воздействия, имеющие разрыва первого рода. Вторым этапом получения
математической модели ДНСУ является отражение в ней факта съема
информации о состоянии объекта. А так как состояние объекта
характеризуется некоторым абстрактным вектором состояния x, элементы
которого в общем случае не наблюдаются, и в реальных системах
оцениваются по текущим значениям u и y. Можно считать, что и на выходах
объекта по состоянию также стоят устройства дискретизации, состоящие из
квантователей и фиксаторов.
130.
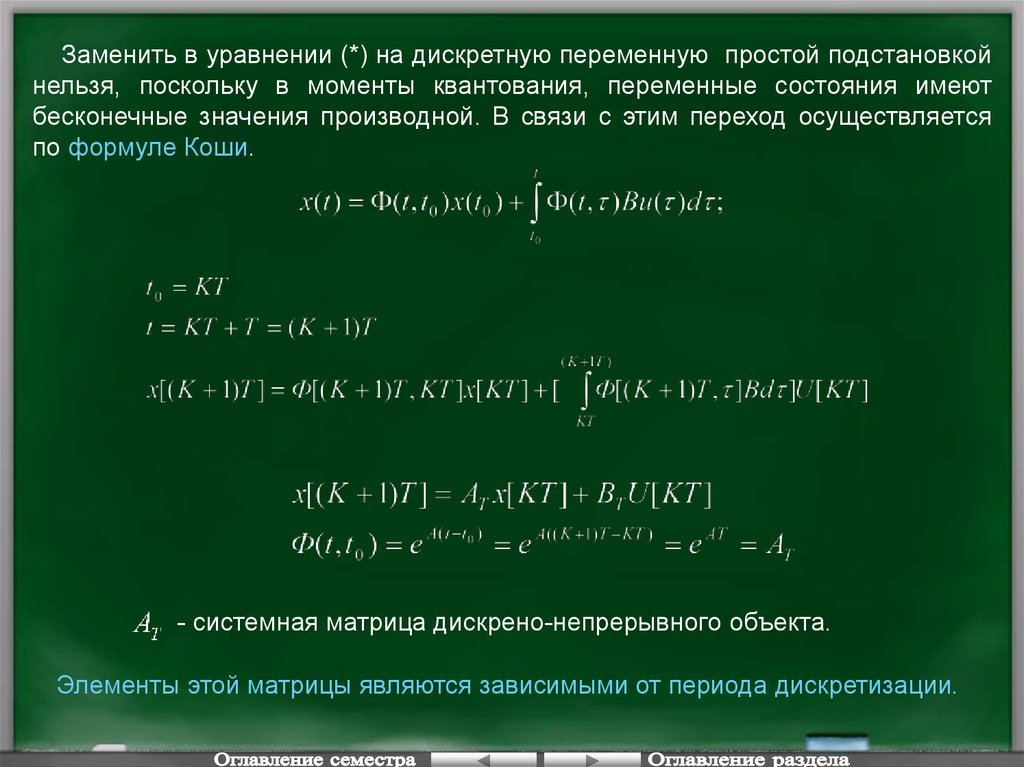
Заменить в уравнении (*) на дискретную переменную простой подстановкойнельзя, поскольку в моменты квантования, переменные состояния имеют
бесконечные значения производной. В связи с этим переход осуществляется
по формуле Коши.
- системная матрица дискрено-непрерывного объекта.
Элементы этой матрицы являются зависимыми от периода дискретизации.
131.
Пример:Дана переходная матрица непрерывной системы.
Уравнения наблюдений, в отличии от состояния останутся прежними.
Для упрощения математической записи ДНСУ часто применяют прием
нормирования по независимому аргументу.
(***)
Система записана для стационарного объекта. Если объект не
стационарный, то матрицы входящие в систему становятся зависимыми от
момента времени K.
132.
Переходные уравнения состояния ДНСЕсли состояния и движения системы описываются уравнением (***), то, как
показано ранее системная матрица ДНСУ имеет вид e AT AT . Форма этого
выражения показывает, что функция будет сходится асимптотически только в
том случае, если матрица А имеет все собственные числа с отрицательной
вещественной частью.
Для определения переходной матрицы дискретной системы можно
применить итерационную процедуру, поскольку первое уравнение в системе
(***) записано для момента времени K и K+1, где К – произвольный текущий
момент, то его можно сдвинуть на любое число позиций в левой и правой
части одновременно.
Устойчивость ДНСУ будет определяться тем: затухающая, ограниченная или
расходящаяся функция матрицы перехода.
Поскольку в последнем выражении системная матрица AT может быть
представлена в любой эквивалентной форме, то ее можно привести к
диагональной форме.
133.
По диагонали такой матрицы стоят ее собственные числа, а приперемножении
диагональных
матриц
по
диагонали
оказываются
соответствующие степени диагональных элементов. Естественно, что
сходимость каждого элемента матрицы будет обеспечена при условии:
При этом условии все элементы матрицы будут стремиться к 0, а сама
матрица - к нулевой матрице. Если какой - то из корней = 1, то получится
ограниченная матрица (астатическая система). При наличии хотя бы одного
корня больше 1 соответствующий элемент матрицы при стремится к , и вся
матрица оказывается неограниченной.
Пример:
Непрерывная динамическая система имеет системную матрицу вида:
Необходимо определить системную матрицу ДНСУ.
Для решения задачи необходимо определить переходную матрицу
непрерывной системы и осуществив дискретизацию получить дискретную
матрицу
.
134.
Преобразуем системную матрицу к диагональной форме записи.Будем считать, что объект системной матрицы А снабжен техническими
устройствами дискретизации по входу и выходу.
Объект квантованный с периодом является устойчивым в дискретной
области, т.к. диагональные элементы системной матрицы меньше 1, а объект с
- устойчивым в дискретной области, но на границе устойчивости, т.к.
диагональные элементы стремятся к единице.
135.
Вычисление переходной матрицы состояния ДНСУВычисление
переходной
матрицы
дискретных
состояний
путем
последовательного перемножения матриц при большом шаге N требует
слишком громоздких вычислений. Поэтому применяют различные способы,
упрощения переходных матриц, либо вычисляют состояния на заданной
области. Одним из способов вычисления переходных матриц является метод,
приводящий процедуру определения степени к последовательному сложению
матриц.
Метод основан на теореме Гамильтона-Кэли:
Любая
квадратная
матрица
удовлетворяет
собственному
характеристическому уравнению.
,т.е. для вычисления переходной матрицы на N-ном шаге достаточно иметь
степени матриц вплоть до N-ной.
продолжая эту процедуру можно получить матрицу любой степени.
136.
Эквивалентные преобразования матрично-векторных моделейлинейных ДНСУ:
Преобразование дискретной модели из одного базиса в другой
осуществляется по алгоритмам, идентичным непрерывным системам.
1) Каноническая форма записи
При этой форме записи, каждая переменная состояния в
k+1
момент времени зависит только в k-ый момент
времени и от управления.
137.
2) Основная нормальная управляемая формаПри такой форме записи связь между будущими и текущими значениями
переменных состояния имеет следующий вид: каждая i-тая переменная
состояния вплоть до n-1 на k+1 шаге совпадает со значениями i+1 на k-том
шаге, таким образом имея значение на n шагов квантования в данном базисе
можно получить состояние системы в начальный момент.
138.
139.
Оценка фундаментальных свойств ДНСУДНСУ как и непрерывные системы оцениваются на устойчивость,
управляемость и наблюдаемость.
Оценка управляемости: составляется матрица управляемости
и оценивается ее ранг.
Оценка наблюдаемости:
далее оценивается ранг.
Оценка устойчивости:
Областью устойчивости является окружность единичного радиуса.
140.
Математические модели процессов в ДНСУОсновной
особенностью
математического
описания
процессов,
протекающих в дискретной системе является наличие взаимодействия между
дискретной и непрерывной частями. В зависимости от формы математического
описания этого процесса и принимаемых при этом допущений могут меняться
формы математических моделей.
Понятие идеального квантователя:
Наиболее
распространенным
математическим
методом
описания
дискретных функций является замена последовательности импульсов, чаще
всего прямоугольных, полученных при квантовании решетчатой функции
состоящей из идеальных импульсов. Если продолжительность замыкания
ключа значительно меньше периода Т, то импульсы дискретной
последовательности можно приближенно заменить идеальными импульсами
идеальной площади:
Решетчатая функция физически нереализуема.
Введение идеального квантователя позволяет значительно упростить
математический аппарат.
Пусть
, тогда сигнал
141.
При анализе дискретных систем с ключами синхронно работающими навходе и выходе, продолжительность замыкания фактически не играет роли,
если за ключом стоит экстраполятор.
Отсюда следовательно выходные сигналы умножаются на идеальные
импульсы.
142.
Применение преобразования Лапласа для анализа дискретных сигналовПреобразуем по Лапласу сигнал
Очевидно, что подынтегральное выражение не равно 0 при , при этом
остается постоянным.
Из выражя видно, что функция является периодической с частотой
повторенияени
Теорема прерывания:
Если непрерывный сигнал имеет ограниченную полосу частот, его
преобразование Фурье удовлетворяет условиям:
0
0
143.
Предположим, что сигнал подвергается квантованию с малым периодом Т,после чего аппроксимируется последовательностью . Если величина Т
достаточно мала, то преобразование Фурье распадается на “основной спектр”
и совокупность повторяющихся с периодом “дополнительных спектров”.
0
0
Таким образом, в спектре квантованного сигнала по сравнению со спектром
непрерывного появляются дополнительные высокочастотные составляющие.
Операция восстановления исходного сигнала по изображению может быть
выполнена без ошибки только при условии:
Если же частота квантования не достаточно велика, т.е.
, то на
основной сигнал накладываются дополнительные спектры и точнее
выделение исходного спектра становится невозможным.
- теорема о прерывании Котельникова.
В теории цифрового управления частота называется Шенноновской:
определяет полосу пропускания дискретной системы.
144.
Анализ качества дискретных систем:Для анализа качества функционирования ДНС используются такие же
показатели качества, как и
коэффициенты
ошибок,
непрерывной системы: время регулирования,
запасы
устойчивости
по
модулю
и
фазе,
колебательность.
На качество и на фундаментальные свойства ДНС существенно влияет
период дискретизации, поэтому выбор периода дискретизации является
важным этапом анализа и синтеза ДНСУ.
Анализ качества во временной области:
Замечание: сложность анализа качества
ДНСУ состоит в том, что
отсутствует информация о поведении системы между тактами квантования, в
этих случаях используют модифицированное z – преобразование.
Связь показателей качества ДНСУ с корнями имеет более сложный вид, чем
в непрерывном случае.
145.
00
146.
Выделение области с заданной степенью устойчивости:0
0
147.
Выделение области равной степени затухания (или колебательности):0
0