


")














































 Физика
ФизикаПохожие презентации:



")






Физика ФЭН 2022
1. ФИЗИКА ФЭН 2022
2.
Сарина Марина ПавловнаДоцент кафедры Прикладной и
теоретической физики, IV -210
3.
• Иродов И.Е. Основные законымеханики
• Трофимова Т.И. Курс физики
• Cарина.М.П. Механика, молекулярная
физика , термодинамика. Часть 1.
Механика, 2014
• Механика и термодинамика. Дубровский
В.Г, Корнилович А.А., Суханов И.И.
(Лабораторный практикум), 2019
4. Есть в библиотеке и в электронной библиотечной системе НГТУ (ЭБС)
5. Лабораторный практикум
6.
7.
8.
9.
• Курс на dispace № 12724• ФЭН 2022 физика
• Физика механика № 4420
• Физика введение № 7821
10. ЭЛЕМЕНТЫ КИНЕМАТИКИ
11. Система отсчета
r ( x, y, z ) xi yj zkY
y
r
k
z
Z
j
A
x
O
i
X
r
- радиус -вектор
12.
• Система отсчета – это системакоординат, указывающая
положение тела в пространстве, +
часы, необходимые для отсчета
времени
• В классической механике время
течет одинаково во всех системах
отсчета
13.
• Мы будем пользоваться декартовойсистемой координат
14. Характеристики движения
• Пусть материальная точка движется внекоторой системе отсчета
Y
r1
O
Z
r
ТРАЕКТОРИЯ
r2
X
ПЕРЕМЕЩЕНИЕ
r r2 r1
15.
• Траектория – это линия, вдоль которойматериальная точка движется в
пространстве
• Вектор перемещения проводится из
начальной точки движения в конечную
• Путь – это длина траектории
(скалярная величина)
16. Мгновенная скорость
rV lim
t 0 t
dr
V
dt
17.
Мгновенная скорость направленапо касательной к траектории движения
в каждой точке
V1
r1
r2
V2
О
Скорость меняется по величине и
направлению
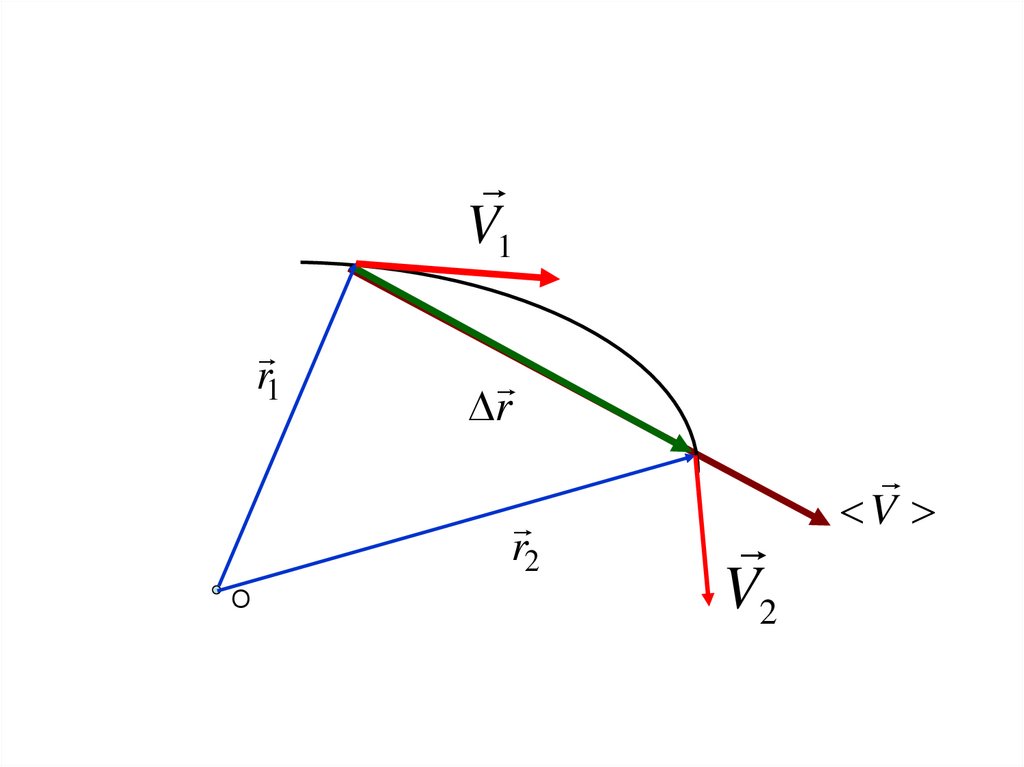
18. Средняя скорость
rV
t
Средняя скорость –
отношение перемещения ∆r за время ∆t
к промежутку времени ∆t .
Направлена так же, как
вектор перемещения
19.
V1r1
r
r2
О
V2
V
20. Ускорение
• Ускорение-быстрота измененияскорости по модулю и направлению
21. Мгновенное ускорение
Va lim
t 0 t
dV
a
dt
Мгновенное ускорение –
первая производная скорости
по времени.
2
d r
dr
d dr
a
2
V
a
dt
dt
dt dt
22. Среднее ускорение
Va
t
V1
r1
V1
r2
О
a
V
V2
23. Координатный способ описания движения
r ( x, y, z ) xi yj zkY
y
r
k
z
Z
j
A
2
2
2
r x y z
x
O
i
X
24.
r ( x, y, z, t ) x(t )i y (t ) j z (t )kdr ( x, y, z , t ) dx(t ) dy (t ) dz (t )
i
j
k
dt
dt
dt
dt
dr ( x, y, z , t )
V
dt
dx(t )
VX
dt
dy (t )
VY
dt
dz (t )
VZ
dt
25.
V VX i VY j VZ k2
2
2
V VX VY VZ
аналогично для ускорения
a a X i aY j aZ k
2
2
2
a a X aY aZ
26. Криволинейное движение
27.
• В некоторых случаях не удобнораскладывать ускорение на
координатные составляющие
• Естественный метод ( удобно
применять, когда известна траектория)
28.
VV V
n
n
n
n 1
- Тангенциальная составляющая, направлена по касательной
-Нормальная составляющая,
направлена перпендикулярно касательной
29.
V VdV d V
d
V
dt
dt
dt
dV
a
dt
d
a a V
dt
- Тангенциальное
ускорение
Определяет быстроту изменения скорости
по величине
30.
d• Направление вектора
?
dt
• единичный вектор 1
• Скалярное произведение
1
• Продифференцируем
d
d d
dt
dt dt
d
2
0
dt
31.
• Вектора перпендикулярныd
dt
d
dt
направлен по направлению
нормали n
• Второе слагаемое в формуле ускорения
d
V
an n
dt
32.
V1V2
s
V
V2
R
R
V1 V2 V
V s
V
R
33.
• При малых углахds Vdt
Vdt
dV ds
R
V
R
2
dV Vdt
dV V a
n
R
V
dt
R
34.
dV
an n
dt
an
V
2
- Нормальное
ускорение
Определяет быстроту изменения скорости
по направлению
- радиус кривизны траектории
35.
a a ana
an
dV
a
dt
a
2
V
an
n
2
2
a a an
36. ПРИМЕР
anR
R
a
dV
a
dt
a
2
V
an
R
- радиус окружности
если
V const
a 0
2
V
a an
R
37. Закон сложения скоростей
38.
tY
y
Y´
y´
t
r
r0
z
Z
r
A
x´
X´
z´
Z´
x
r r0 r t t
X
39.
• Пусть система отсчета К´ движетсяотносительно системы отсчета К со
скоростью V0
• Системы отсчета движущаяся
равномерно и прямолинейно, либо
находящаяся в состоянии покоя
называется инерциальной
40.
r0 V0tr r0 r
V0t r
41.
• В проекциях на оси координатx x V0 xt
y y V0 yt
z z V0 z t
• V0x, V0y,, V0z – проекции скорости на оси
координат
42. Закон сложения скоростей
r r0 rdr dr0 dr
dt dt dt
V V0 V
43.
• Скорость движенияточки относительно
системы отсчета К
• Скорость движения
точки относительно
системы отсчета К´
• Скорость движения
системы отсчета К´
относительно
системы отсчета К
V
dr
V
dt
V
dr
V
dt
V0
dr0
V0
dt
44.
V V0 VY
V
Y´
V0
Z´
Z
V
X´
V
V0
X
45. Пример
рекатечение
лодка
r
r0
r
плот
r r0 r
V V0 V
46. ПРЕОБРАЗОВАНИЯ ГАЛИЛЕЯ
47.
V0 y V0 z 0Y
t
t
Y´
r
A
X´
Z´
Z
V0
X
48.
x x V0ty y
z z
t t
49.
V V0 VdV dV0 dV
dt
dt
dt
dV
a
dt
dV
a
dt
a a
V0 const
t t
dV0
0
dt
50. Принцип относительности Галилея
• Все законы механики имеютодинаковую форму во всех
инерциальных системах отсчета