

















 Механика
Механика Электроника
ЭлектроникаПохожие презентации:










Анализ и синтез электромеханической системы, осуществляющей регулирование скорости и крутящего момента двигателя
1.
Министерство науки и высшего образования Российской ФедерацииФедеральное государственное бюджетное образовательное учреждение высшего образования
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТСИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра промышленной электроники (ПрЭ)
АНАЛИЗ И СИНТЕЗ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ,
ОСУЩЕСТВЛЯЮЩЕЙ РЕГУЛИРОВАНИЕ СКОРОСТИ И КРУТЯЩЕГО
МОМЕНТА ДВИГАТЕЛЯ
Курсовая работа по дисциплине
«Теория автоматического управления»
ФЭТ.КР.ХХХХХХ.654ПЗ
Томск, 2022
Студент гр. 369-2
К.В. Савельев
Руководитель
Доцент каф. ПрЭ
Ю. М. Лебедев
2. 1 Анализ технического задания
На рисунке 1.1 изображена структурная схема заданной ЭМС.ПП – преобразователь перемещения в напряжение; РП – регулятор перемещения; РС – регулятор скорости
вращения двигателя; РМ – регулятор крутящего момента двигателя; П – преобразователь;
Д1 – электрическая часть двигателя; Д2 – механическая часть двигателя; ОСМ – отрицательная обратная связь по
моменту; Kкω – компенсатор влияния скорости ω на момент М; Kкм – компенсатор влияния
момента M на скорость ω; Мс – статический момент валу электродвигателя
Рисунок 1.1 – Структурная схема заданной ЭМС
2
3. 2.1 Анализ контура регулирования момента
На рисунке 2.1.1 приведена структурная схема контура регулирования момента в ЭМС сполной компенсацией влияния скорости на момент. Для неё рассчитываются и строятся только
переходные характеристики по задающему воздействию относительно момента и относительно
скорости.
Рисунок 2.1.1 – Контур, охваченный обратной связью по моменту
3
4.
На рисунке 2.1.2 приведены ЛАЧХ и ЛФЧХ контура регулирования момента в ЭМС.1 1.1 999.9
1
50
0.1
1
10
100
1 10
3
4
1 10
1.5
1
10
100
1 10
3
2
Gì ( )
Fì ( )
2.5
50
3
100
3.5
а
б
Рисунок 2.1.2 – ЛАЧХ (а) и ЛФЧХ (б) контура регулирования момента
ср = 33,709
Частота среза (рад/с):
Запас устойчивости по фазе (в Fм = 59,348 deg
пас устойчивостигр):
по амплитуде стремится к бесконечности, т.к. частота переворота фазы стремитс
к -π
4
5.
На рисунке 2.1.3 приведен график переходного процесса относительно момента.1.05 0ì
1.856
0.95 0ì
200
ì ( t )
100
0
1
2
3
4
t
Рисунок 2.1.3 – График переходного процесса относительно момента
t max 0,304
Время, соответствующее максимуму момента для передаточной функции по задающему
tпм1 = 1,856
воздействию(с):
Время переходного процесса относительно
момента:
5
6.
На рисунке 2.1.4 приведен график разгона.200
fì ( t )
100
0.05 0ì
0
1
2
3
4
t
Рисунок 2.1.4 – График разгона
Время переходного процесса относительноtпм2 = 1,813
скорости:
6
7. 2.2 Анализ контура слежения за перемещением
На рисунке 2.2.1 приведена структурная схема контура слежения за перемещением. Наней преобразователь и двигатель охвачены эквивалентной отрицательной обратной связью.
Рисунок 2.2.1 – Структурная схема для анализа контура регулирования скорости
7
8.
На рисунке 2.2.2 приведены ЛАЧХ и ЛФЧХ контура слежения за перемещением в ЭМС.4
100
50
Gï ( )
0.1
2
1
10
100
3
1 10
Fï ( )
1
50
10
100
3
1 10
1 10
4
2
100
150
4
а
×àñòîòà ñðåçà (ðàä/ñ)
б
Рисунок 2.2.2 – ЛАЧХ (а) и ЛФЧХ (б) контура слежения за
перемещением
ср = 14,751
Частота среза (рад/с):
6,378
Частота переворота
фазы::
8
9.
Нарисунке
2.2.3
приведена
переходная
характеристика
контура
слежения
за
перемещением по задающему воздействию.
80
60
40
L( t )
20
0
0.2
0.4
0.6
0.8
20
t
Рисунок 2.2.3 – Переходная характеристика по задающему воздействию
Расходящийся переходный процесс свидетельствует о неустойчивости
контура, следовательно, требуется его коррекция.
9
10. 3 Синтез ЭМС
На рисунке 3.1 приведена структурная схема синтезируемой ЭМС и ее преобразование.а
б
Рисунок 3.1 – Структурная схема синтезируемой ЭМС (а) и ее преобразование (б)
10
11. 3.1 Синтез контура регулирования момента
На рисунке 3.1.1 приведена структурная схема контура регулирования момента, в которуювведено корректирующее устройство Wрм(р).
Рисунок 3.1.1 – Структурная схема контура регулирования момента с
корректирующим устройством
11
12.
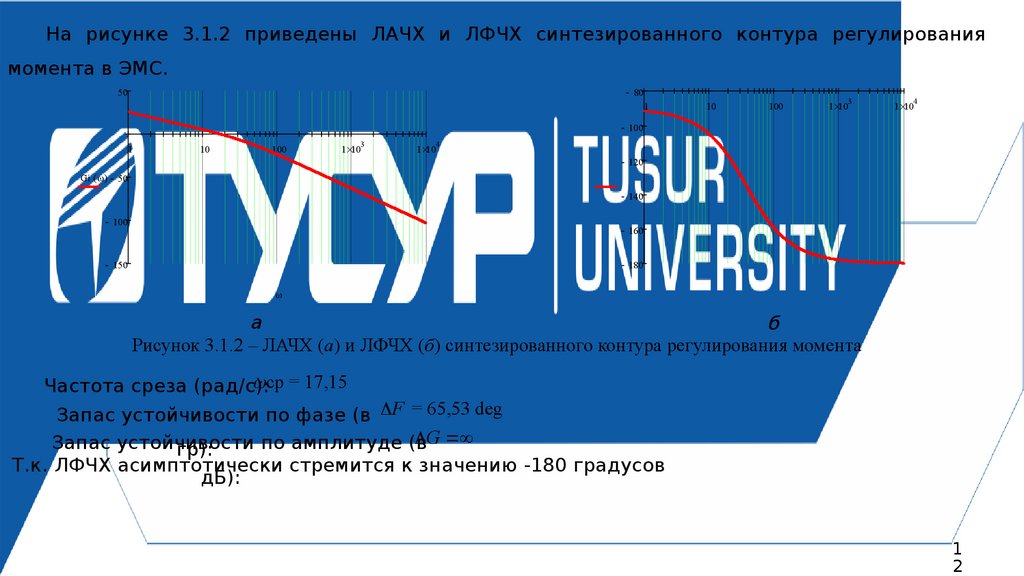
На рисунке 3.1.2 приведены ЛАЧХ и ЛФЧХ синтезированного контура регулированиямомента в ЭМС.
50
80
1
10
100
1 10
3
4
1 10
100
1
10
100
3
1 10
1 10
4
120
Gì ( ) 50
Fì ( )
140
100
160
150
180
180
а
б
Рисунок 3.1.2 – ЛАЧХ (а) и ЛФЧХ (б) синтезированного контура регулирования момента
ср = 17,15
Частота среза (рад/с):
Запас устойчивости по фазе (в F = 65,53 deg
G
Запас устойчивости
по амплитуде (в
гр):
Т.к. ЛФЧХ асимптотически стремится к значению -180 градусов
дБ):
1
2
13.
На рисунке 3.1.3 приведен график переходного процесса синтезированного контурарегулирования момента.
0.102
0.155
Mï 1.05
Mï 0.95
20
M ( t)
10
0
0.1
0.2
0.3
t
Рисунок 3.1.3 – Переходная характеристика синтезированного контура регулирования момента
t max 0,165
Время, соответствующее максимуму момента для передаточной функции по задающему
M max 22,64
аксимальное значение момента (рад/с):
воздействию(с):
tппм = 0,108
Время переходного процесса в контуре регулирования
= 4,328 %
Перерегулирова ммомента:
ние:
13
14. 3.2 Синтез контура слежения за перемещением
На рисунке 3.2.1 приведена структурная схема синтезируемого контура слежения заперемещением.
Рисунок 3.2.1 – Структурная схема для синтезируемого контура слежения за
перемещением
14
15.
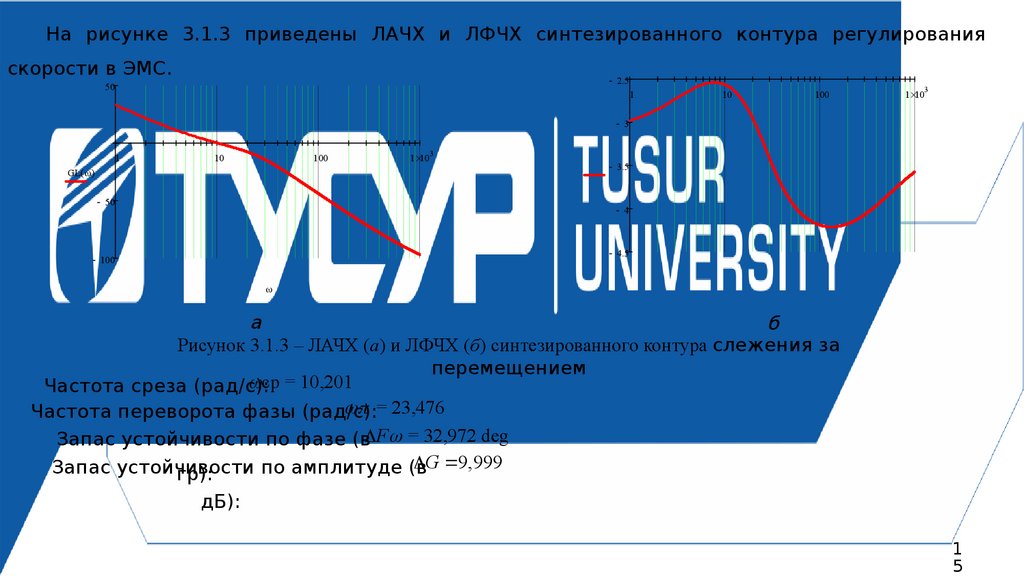
На рисунке 3.1.3 приведены ЛАЧХ и ЛФЧХ синтезированного контура регулированияскорости в ЭМС.
2.5
50
1
10
100
1 10
3
3
1
10
100
GL( )
50
3
1 10
FL( ) 3.5
4
4.5
100
а
б
Рисунок 3.1.3 – ЛАЧХ (а) и ЛФЧХ (б) синтезированного контура слежения за
перемещением
ср
=
10,201
Частота среза (рад/с):
= 23,476
Частота переворота фазы (рад/с):
Запас устойчивости по фазе (в F = 32,972 deg
G 9,999
Запас устойчивости
по амплитуде (в
гр):
дБ):
1
5
16.
На рисунке 3.1.4 приведен график переходного процесса синтезированного контура2
слежения за перемещением.
0.261
0.46
1.5
1.05 Lc0
0.95 Lc0
1
Lc( t )
0.5
0
0.2
0.4
0.6
0.8
1
0.5
t
Рисунок 3.1.4 – Переходная характеристика синтезированного контура слежения за перемещением.
Время, соответствующее максимуму момента передаточной функции контура регулирования
t max 0, 276 на ТО:(с):
скорости при его настройках
Время переходного процесса в контуре слежения за tппL = 0,488
Перерегулирова с = 52,997 %
перемещением:
ние:
16
17. 4 Электронное моделирование внешнего скорректированного контура по его структурной схеме
На рисунке 4.2 приведена структурная схема внешнего нескорректированного контура.Рисунок 4.2 – Внешний скорректированный контур
17
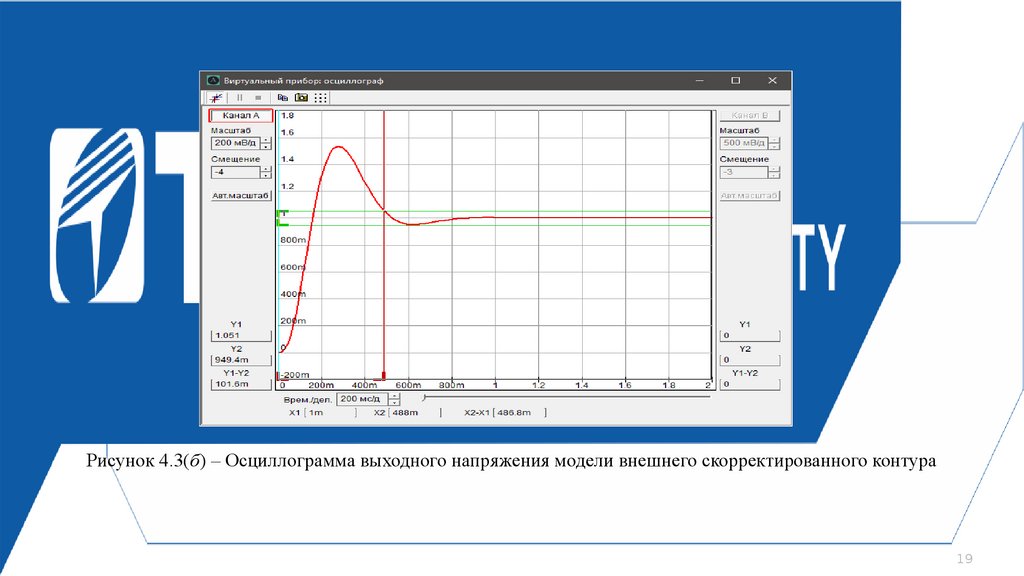
18.
На рисунке 4.3 приведена осциллограмма выходного напряжения модели, отражающаяпереходную характеристику внешнего нескорректированного контура при подаче на вход
модели напряжения Uвх = 1 В.
а
Рисунок 4.3(а) – Осциллограмма выходного напряжения модели внешнего скорректированного контура
18
19.
Рисунок 4.3(б) – Осциллограмма выходного напряжения модели внешнего скорректированного контура19
20. 5 Выводы по результатам проведенных исследований
– заданная скорректированная ЭМС имеет хорошеебыстродействие в контуре слежения за перемещением
– при настройке контура слежения за перемещением удалось
обеспечить заданной быстродействие
– результаты расчетов подтверждены электронным
моделированием синтезированного скорректированного
контура слежения за перемещением двигателя, погрешность
моделирования не превысила 5 %.
20
21.
СПАСИБО ЗАВНИМАНИЕ!
21