


Похожие презентации:







")


Гусеничная птатформа, управляемая с планшета
1.
Гусеничная птатформа, управляемая спланшета
Г
у
с
е
н
и
ч
н
а
я
п
л
а
т
ф
о
р
м
а
,
у
п
р
а
в
л
я
е
м
а
я
с
п
л
а
н
ш
е
т
а
Выполнил: ученик 6 класса Арсеньев Вячеслав
Васильевич
Руководитель: Потёмкин Антон Евгеньевич
МАУДО «ЦРТДЮ»
2.
Цель проекта• Научиться проектировать и создавать движущиеся
модели с дистанционным упарвлением.
3.
Задачи проекта• Сконструировать гусеничную платформу для танка
• Построить детали рамы и гусениц в программе 3D
моделирования для распечатки их на 3D принтере
• Распечатать детали рамы и гусениц
• Собрать раму и гусеницы
• Смонтировать и подключить моторы
• Разработать интерфейс управления для планшета
• Написать управляющую программу для гусеничной
платформы
4.
Проблемы• Гусеничная платформа полнистью проектировалась с нуля, поэтому для того, чтобы
итоговая конструкция оказалась работоспособной, необходимо было провести
настоящую конструкторскую работу.
• 3D печатные детали по прочности уступают аналогичным, изготовленным методом
литья, это нужно учитывать при моделировании.
• Поскольку это только платформа, необходимо было предусмотреть возможность
установки на неё дполнительного оборудования без внесения кординальных
изменений.
• Поскольку 3D печать даёт некоторую погрешность при изготовлении деталей, усилие
вращения гусениц оказалось немного разным. Для компенсирования этого эффекта
пришлось вносить корректировки в мощностной баланс между двигателями.
• Для изготовления деталей был использован пластик PETG, который сильно скользит
по полированым поверхностям.
5.
Конструирование и моделирование• Конструирование производилось сразу в среде моделирования КОМПАС 3D. Для этого
туда сперва были перенесены те части конструкции, которые не могут подвергаться
изменению, и вокруг них проектировалась будующая модель. В нашем случае это были
электродвигатели с редукторами
• Когда модели электродвигателей были готовы, вокруг них была выстроена рама,
приводы гусениц.
• Для построения была выбрана рамочная конструкция. Боковые стенки пришлось
сделать цельными, потому, что на них приходится основная нагрузка конструкции .
• Важно было спроектировать конструкцию разборной, чтобы облегчить 3D печать
• Когда все детали были спроектированы и построены в 3D моделлере, мы распечатали
их на 3D принтере и собрали в готовую модель.
• Поскольку проектирование происходило сразу в среде 3D моделирования, все детали
отлично подошли друг к другу.
6.
СборкаПожалуй самым сложным и
трудозатратным был процес
сборки гусениц. Для них
потребовалось распечатать
118 одинаковых деталей,
после чего соединить их
металлическими штифтами,
сделанными из обрезанных по
размеру гвоздей.
7.
СборкаКогда рама была готова,
на неё установили
двигатели, аккумуляторы,
микрокнтроллер, плату
управления двигателями
и соедининили вместе
8.
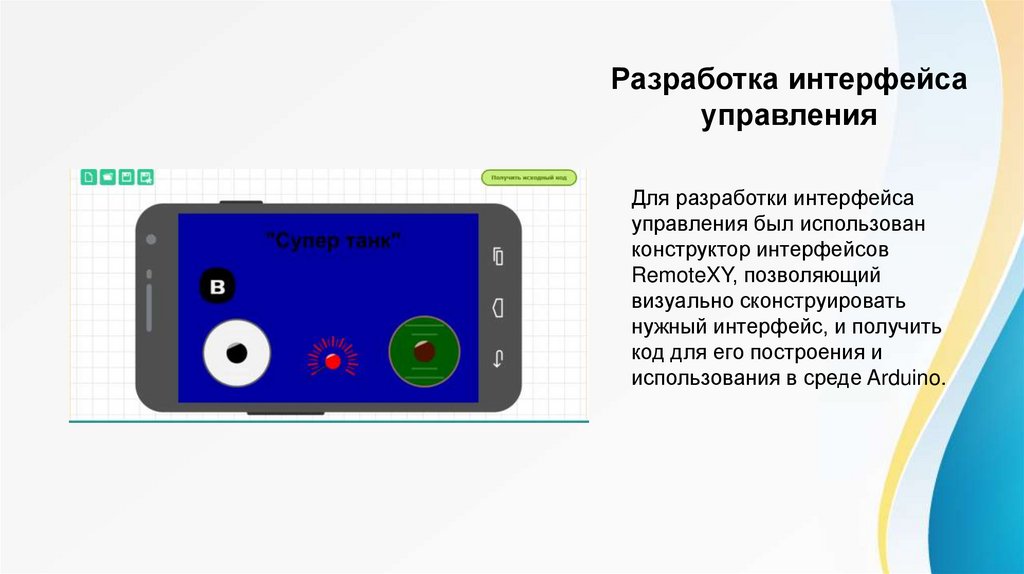
Разработка интерфейсауправления
Для разработки интерфейса
управления был использован
конструктор интерфейсов
RemoteXY, позволяющий
визуально сконструировать
нужный интерфейс, и получить
код для его построения и
использования в среде Arduino.
9.
Управляющая программа• Когда платформа и интерфейс для неё были собраны,
осталось только написать программу для
микроконтроллера Arduino, чтобы связать интерфейс
на планшете с электродвигателями.
10.
Результатом работы стала вот такая гусеничнаяплатформа
11.
Выводы:В результате проделанной работы
• Научились создавать собственные сборные
конструкции в среде 3D моделирования путём
построения их частей вокруг неизменных элементов
• Научились производить постобработку распечатаных
деталей и узнали как важно учитывать погрешности и
допуски при моделировании
• Закрепили навыки конструирования интерфейсов и
навыки программирования в среде Arduino
12.
Благодарим за вниманиеВыполнил
Ученик 6 класса Арсеньев Вячеслав
Васильевич