











































 Физика
ФизикаПохожие презентации:

")








Механика. Кинематика
1. Механика
Кинематика2. Кинематика
Кинематика изучает движение тел, нерассматривая причины, которые это
движение обуславливают.
3. Физические модели
Материальная точка – это тело, форма и размеры которогонесущественны в условиях данной задачи.
Абсолютно твердое тело – это тело, деформацией
которого в условиях данной задачи можно пренебречь, и
расстояние между любыми двумя точками этого тела
остается постоянным.
Абсолютно упругое тело – это тело, деформация которого
подчиняется закону Гука, а после прекращения внешнего
силового воздействия такое тело полностью
восстанавливает свою первоначальную форму.
Абсолютно неупругое тело – это тело, полностью
сохраняющее деформированное состояние после
прекращения действия внешних сил.
4. Виды движения
Поступательное движение – это движение, прикотором любая прямая, жестко связанная с
телом, остается параллельно своему
первоначальному положению.
Вращательное движение – это движение, при
котором все точки тела движутся по
окружностям, центры которых лежат на одной и
той же прямой, называемой осью вращения.
5. Система отсчета
Система отсчета – это совокупностьсистемы координат и часов, связанных с
телом отсчета.
Тело отсчета – произвольно выбранное
тело, относительно которого
определяется положение тела.
6.
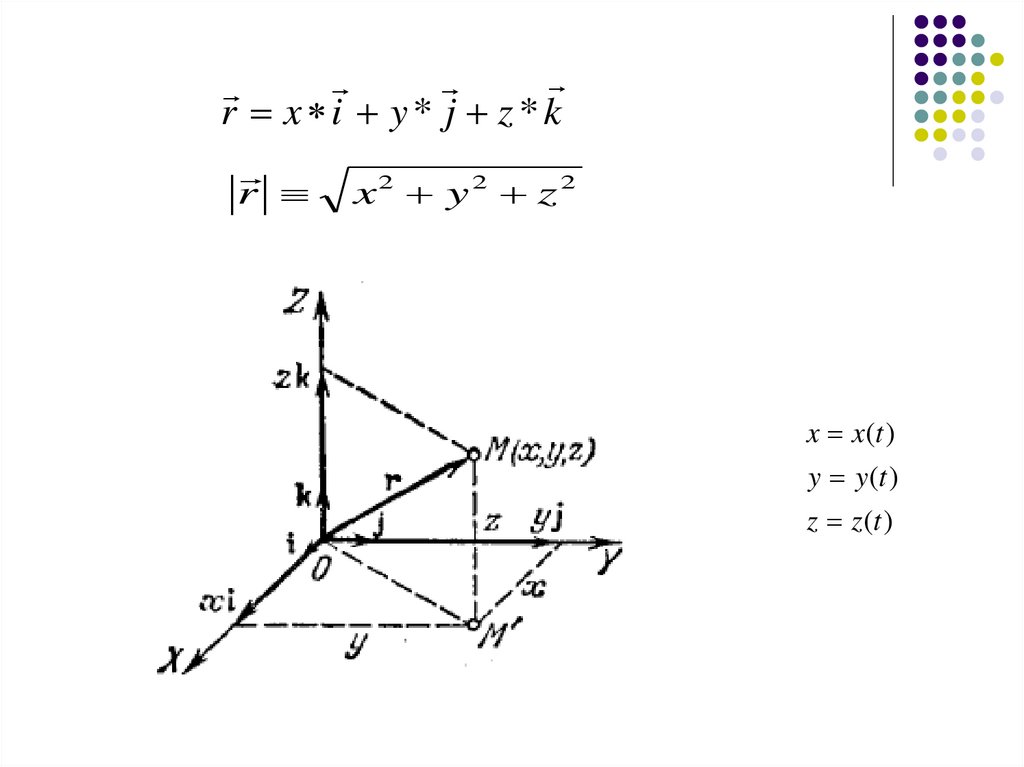
r x i y* j z *kr
x2 y 2 z 2
x x(t )
y y (t )
z z (t )
7. Движение
Прямолинейное движениеКриволинейное движение
8. Длина пути
Длиной пути точки называется сумма длинвсех участков траектории, пройденных
этой точкой за рассматриваемый
промежуток времени.
r r r0 r (t ) r (t0 ) x * i y * j z * k
Если
t 0, то dS dr dr
9. Скорость
Скорость – векторная величина, которая определяеткак быстроту движения тела, так и его направление в
данный момент времени.
Средняя скорость
r
t
S
t
10. Мгновенная скорость
Мгновенная скорость – векторная величина,равная первой производной по времени от r
r
dr
lim
r
t 0 t
dt
Вектор мгновенной скорости направлен по
касательной к траектории в сторону движения.
Модуль мгновенной скорости – скалярная
величина.
r
S dS
lim
lim
t 0 t
t 0 t
dt
t2
S (t ) dt
t1
11. Ускорение
atУскорение
Ускорение – векторная величина, характеризующая
быстроту изменения скорости
по модулю и
направлению. a
t
Мгновенное ускорение
d
a lim
r
t 0 t
dt
12. Ускорение
atУскорение
a an at
dv
at
dt
an
n
dt
2
r
a an2 at2
13. Виды движения
Прямолинейное, равномерное движение;at 0, an 0, a 0
S *t
x(t ) x0 * t
Прямолинейное, равноускоренное движение;
at a const , an 0
0 0
at a
t
t t0
t
(t ) 0 at
t
at 2
S ( 0 at ) dt 0t
2
0
dS
S
dt
14.
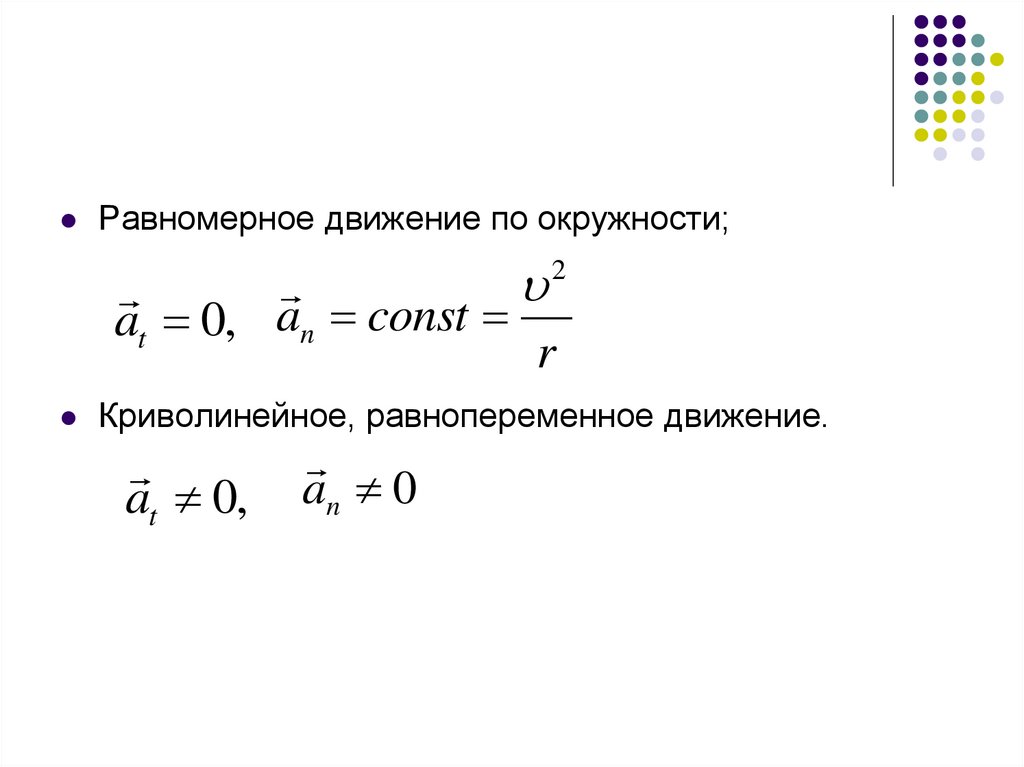
Равномерное движение по окружности;2
at 0, an const
r
Криволинейное, равнопеременное движение.
at 0,
an 0
15. Кинематика вращательного движения
dУгловое перемежение
– векторная величина,
модуль которой равен
углу поворота, а
направление совпадает
с направлением
поступательного
движения правого
винта.
16.
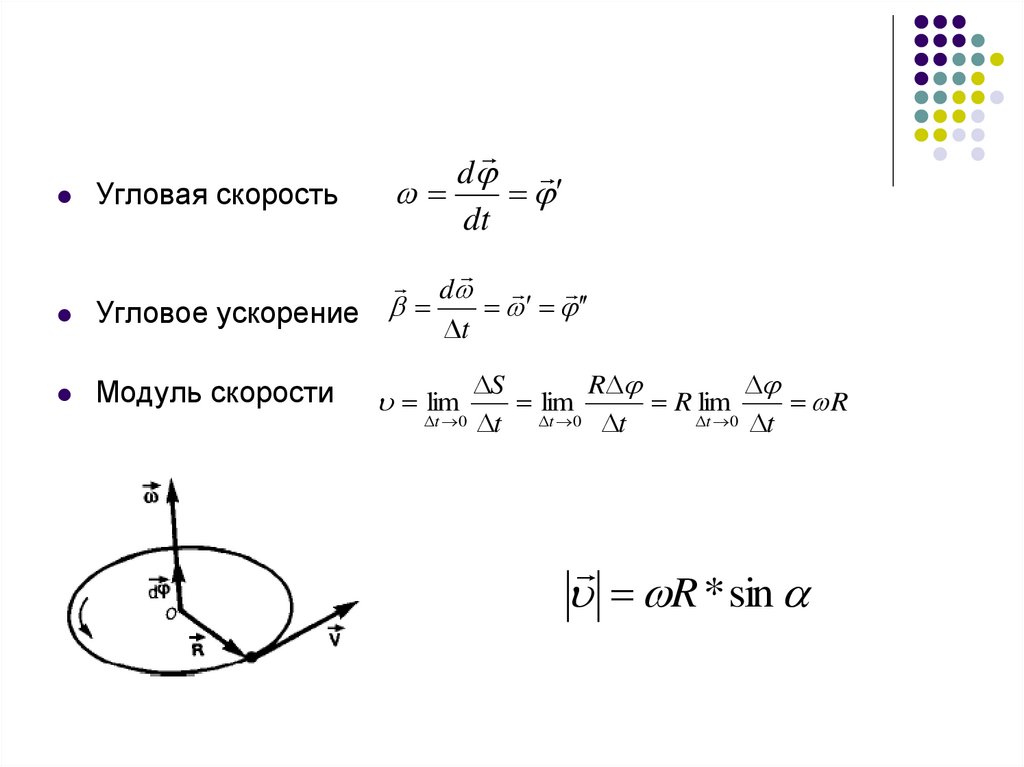
Угловая скоростьd
dt
Угловое ускорение
d
t
Модуль скорости
lim
S
R
lim
R lim
R
t 0 t
t 0 t
t 0 t
R * sin
17.
Т2
1
Т 2
18. Равноускоренное вращательное движение
const0 t
0 0 t
an
2
t 2
2R2
2
2R
R
R
d d ( R )
d
at
R
R
dt
dt
dt
d
S dt Rdt R
R
dt
t1
t1
t1
t2
t2
t2
19. Динамика материальной точки
20. Первый закон Ньютона
Материальная точка или тело сохраняетсостояние покоя или равномерного
прямолинейного движения пока воздействие
со стороны других тел не заставит ее
изменить это состояние.
Стремление тела сохранить состояние покоя
или равномерного прямолинейного движения
называется инертностью.
21.
Существуют инерциальные системыотсчета, такие, что относительно которых
материальная точка, не подверженная
воздействию других тел, движется
равномерно и прямолинейно.
22. Сила
Сила – векторная величина, котораяявляется мерой механического действия на
тело со стороны других тел или полей, в
результате которого тело приобретает
ускорение или изменяет форму и размеры.
Силы бывают:
Центральные
Нецентральные
1кг * м
1Н
с2
23. Механическая система
Механическая система – совокупностьматериальных точек (тел),
рассматриваемых как единое целое.
Замкнутая (изолированная) механическая
система - механическая система, не
взаимодействующая с внешними телами,
на нее не действуют внешние силы.
24.
Масса – физическая величина, одна изосновных характеристик материи,
определяющая ее инерциальные и
гравитационные свойства.
Плотность показывает, как плотно
упакованы молекулы в единице объема:
Импульс
dm
dV
p m
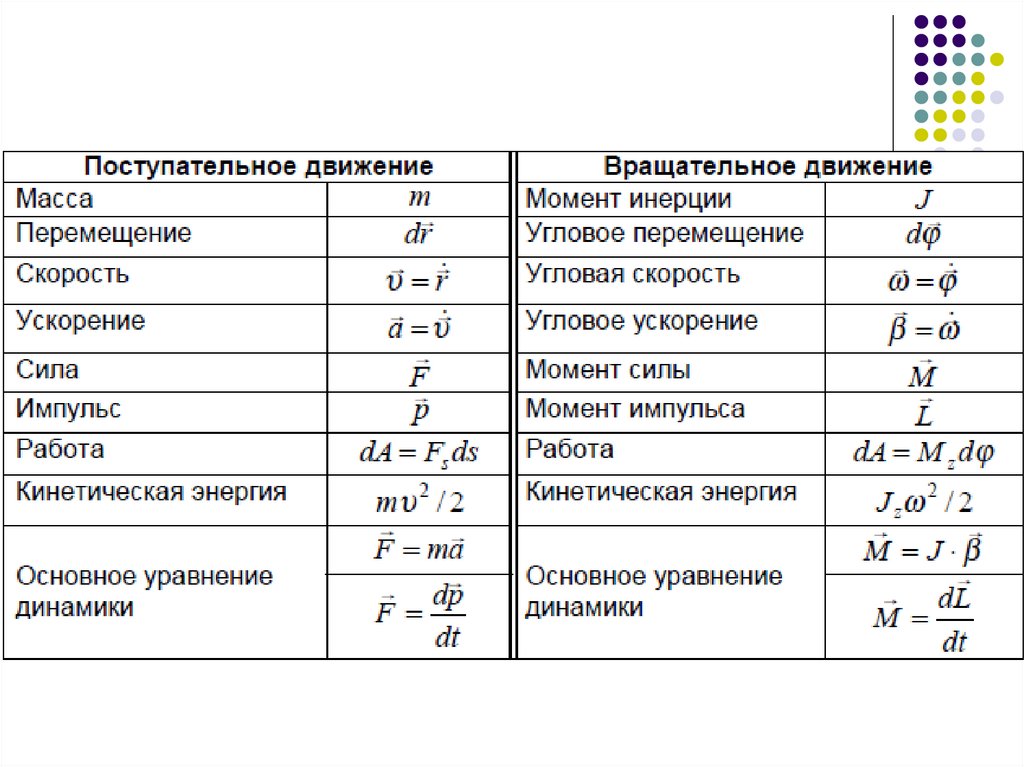
25. Второй закон Ньютона
Fa ;
m
d
d (m ) dp
F ma m
m
p
dt
dt
dt
26.
Скорость изменения импульса материальнойточки равна действующей на нее силе.
p p 2 p1
dp F * dt
t2
p F * dt
t1
27. Принцип независимости действия сил:
Если на материальную точку действуютодновременно несколько сил, то каждая их
этих сил сообщает материальной точке
ускорение, согласно второму закону
Ньютона, как будто других сил не было.
28. Третий закон Ньютона
Всякое действие материальных точек(тел) друг на друга имеет характер
взаимодействия. Силы, с которыми тела
действуют друг на друга, всегда равны по
модулю, противоположны по направлению
и действуют вдоль одной прямой,
соединяющей эти точки.
29. Закон сохранения импульса.
Импульс замкнутой системы неизменяется с течением времени.
n
p mi 1 const
i 1
30. Закон движения центра масс
Центр масс (инерции) системы –воображаемая точка С, положение
которой характеризует распределение
массы этой системы.
mi r1
n
rc i 1
m
n
d c
m
Fi
dt
i 1
31. Силы в механике
1)Закон всемирного тяготения
(гравитационные силы).
mm
F G 12 2
r
mT m3
mT a G
R2
m3
g a G 2 9,81 м 2
с
R
32. Вес тела
Вес тела – сила, с которой тело вследствиепритяжения к Земле действует на опору или
подвес.
P mg
Сила тяжести действует всегда, а вес
проявляется лишь тогда, когда на тело
кроме силы тяжести действуют другие силы.
Невесомость – состояние тела, при котором
оно движется только под действием силы
тяжести.
P m( g a )
P m( g a )
33.
2) Сила упругости возникает в результатевзаимодействия тел, которая
сопровождается их деформацией.
F k * r ,
где r – радиус – вектор, характеризующий
смещение частицы из положения
равновесия, k – коэффициент упругости
34.
3) Сила трения – скольжения.Возникает при скольжении данного тела по
поверхности другого.
Fупр kN,
где k- коэффициент трения-скольжения,
зависит от природы и состояния
соприкасающихся поверхностей, N – сила
нормального давления.
Сила трения направлена по касательной к
поверхностям в сторону, противоположную
движению.
35. Работа и энергия
Энергия – универсальная мера различныхформ движения и взаимодействия.
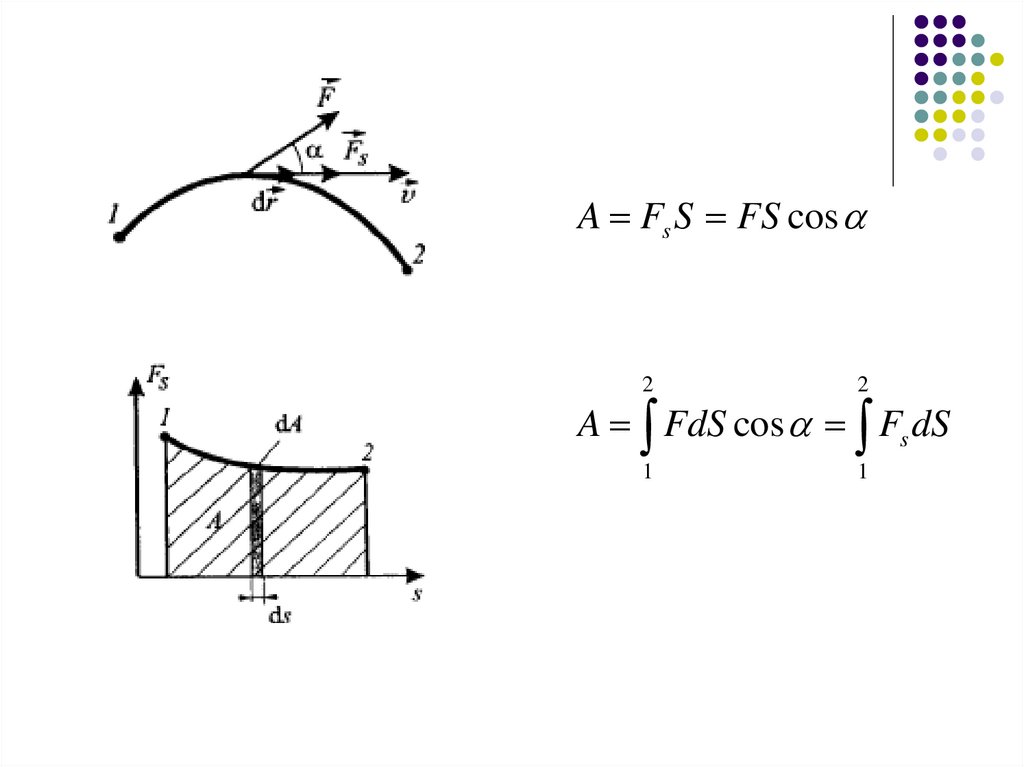
Работа силы – количественная
характеристика процесса обмена энергией
между взаимодействующими телами.
36.
A Fs S FS cos2
2
1
1
A FdS cos Fs dS
37.
Потенциальная сила – сила, работа которойопределяется лишь начальным и
конечным положением тела и не зависит
от формы пути.
Мощность N
dA Fdr
N
( F , )
dt
dt
38. Кинетическая и потенциальная энергия
Кинетическая энергия – мера механическогодвижения системы.
dEk dA
d
dA Fdr ma dr m
dr dK
dt
v
m 2
K mvdv
2
0
39. Свойства кинетической энергии:
Является функцией состояния системы;Всегда положительна;
Неодинакова в разных инерциальных
системах;
40. Потенциальная энергия
Потенциальная энергия W – механическаяэнергия системы тел, определяемая их
взаимодействием и характером сил между
ними.
Зависит от конфигурации системы и ее
положения по отношению к внешним
телам.
41.
Энергия тела на определенной высоте:W mgh
Потенциальная энергия пружины:
2
kx
W
2
Закон сохранения энергии:
В системе тел, между которыми действуют
только консервативные силы, полная
механическая энергия сохраняется, не
изменяется со временем.
E Ek E p
E const
42. Соударения
Удар – столкновение двух или более тел,при котором взаимодействие длится очень
короткое время.
Центральный удар – удар, при котором
тела до удара движутся по прямой,
проходящей через их центры масс.
43. Абсолютно упругий удар
Абсолютно упругий удар – столкновение двух тел, врезультате которого в обоих взаимодействующих телах
не остается никаких деформаций, и вся кинетическая
энергия, которой обладали тела до удара, после удара
снова превращается в кинетическую энергию.
Выполняются законы сохранения импульса и энергии.
m1 1 m2 2 m1 1 m2 2
2
2
2
2
m1 1
m2 2
m1 1
m2 2
2
2
2
2
(m m2 ) * 1 2m2 2
1 1
m1 m2
44. Абсолютно неупругий удар
Абсолютно неупругий удар – столкновение двух тел,в результате которого тела объединяются, двигаясь
дальше как единое целое.
Выполняется только закон сохранения импульса.
Закон сохранения механической энергии не
выполняется.
m1 1 m2 2 (m1 m 2 )
m1 1 m 2 2
m1 m2
Если m1 m2 , то
1 2
2
45.
Вследствие деформации часть кинетическойэнергии переходит во внутреннюю энергию
тел (разогрев). Соответственно, уменьшение
энергии равно
m1 1 m2 2
(m1 m2 ) 2
E (
)
2
2
2
2
2
Если
2 0 , то m1 1 ; E
m1 m2
m2
m1 1
m1 m2
2
2
46. Механика твердого тела
47. Момент инерции
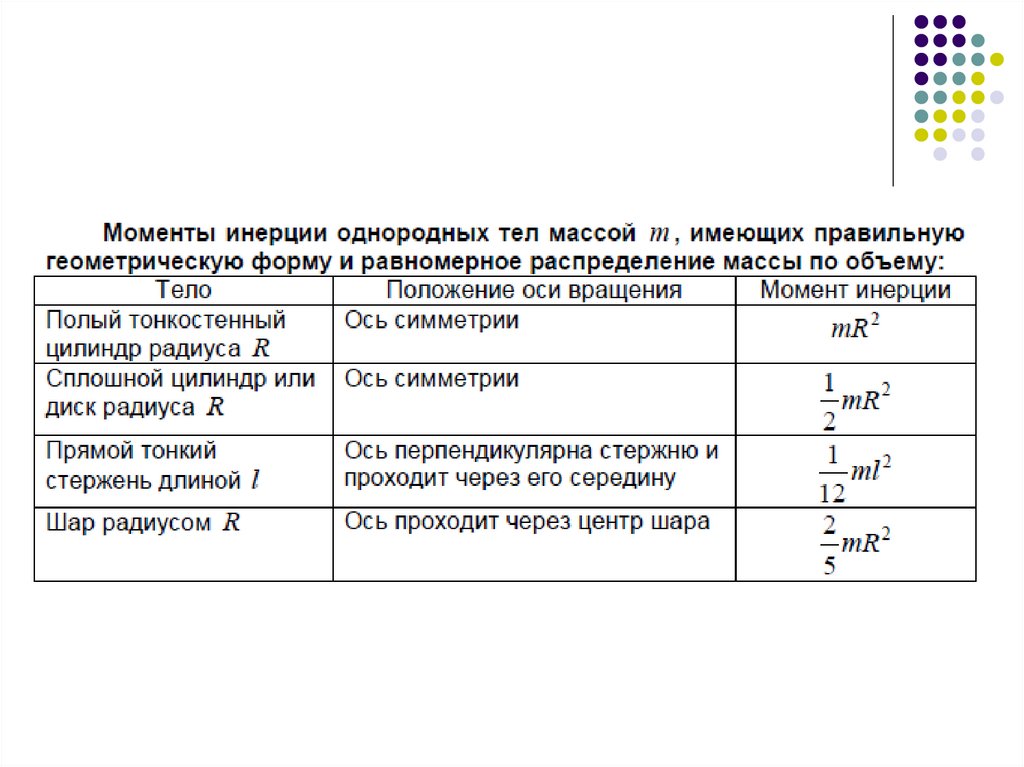
Моментом инерции материальной точкиотносительно оси вращения называется
произведение массы точки на квадрат
расстояния до оси
J mi ri
2
48.
Моментом инерции тела относительно осивращения называется физическая величина,
равная сумме произведений масс
материальных точек на квадраты их расстояний
до рассматриваемой оси.
m
J mi ri
2
i 1
m
J r 2 dm
o
Главный момент инерции – момент инерции
относительно оси вращения, проходящий через
центр масс.
49.
50. Теорема Штейнера
Момент инерции тела относительно произвольнойоси равен сумме моментов его инерции
относительно параллельной оси, проходящей через
центр масс тела, и произведения массы тела на
квадрат расстояния между осями.
J z J c mr 2
l 2 1
1 2 1 2
2
J z J c m( ) ml ml ml
2
12
4
3
51. Кинетическая энергия вращения
2m
mi i
mi ( i ri ) 2 m
J
E вр
mi ri 2
2
2
2 i 1
2
i 1
i 1
m
2
m 2 J 2
E
2
2
52. Момент силы
Момент силы относительно неподвижнойточки О – физическая величина,
определяемая векторным произведением
радиус-вектора, проведенного из точки О
в точку А приложения силы.
M r, F
M F r sin Fl , l r sin
53. Основное уравнение динамики вращательного движения твердого тела
M J54. Момент импульса и закон его сохранения
L r,m
L
m r J
i i i
i 1
L const
dL
M
L
dt
55.
56. Деформация твердого тела
Деформация – изменение формы и размеровтвердых тел под действием внешних сил.
Пластическая деформация – деформация,
которая сохраняется в теле после
прекращения действия внешних сил.
Упругая деформация – деформация, при
которой после прекращения действия
внешних сил тело принимает
первоначальные размер и форму
57. Виды деформации
РастяжениеСжатие
Кручение
Изгиб
Сдвиг
58.
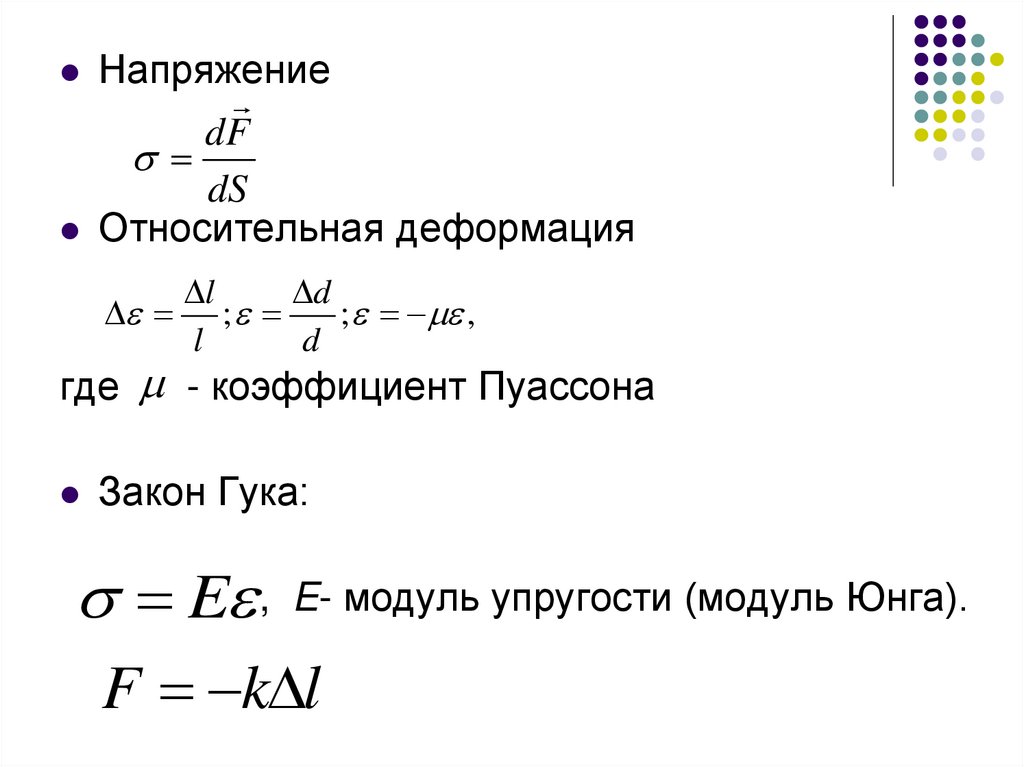
НапряжениеdF
dS
Относительная деформация
l
d
;
; ,
l
d
где - коэффициент Пуассона
Закон Гука:
E , E- модуль упругости (модуль Юнга).
F k l
59.
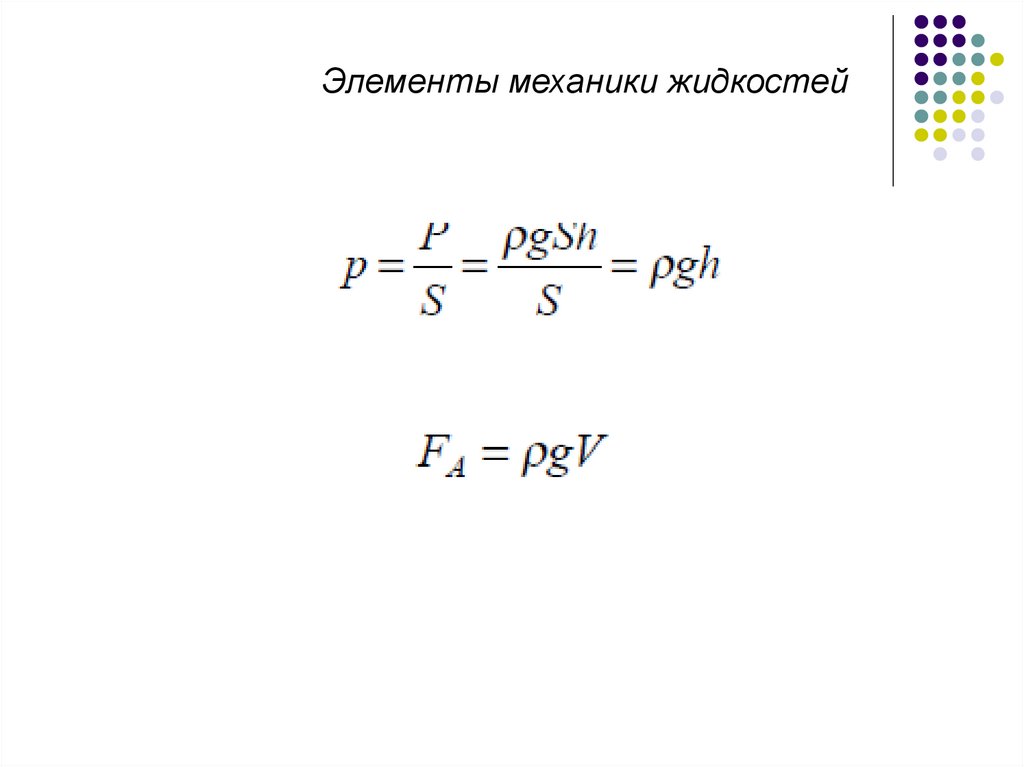
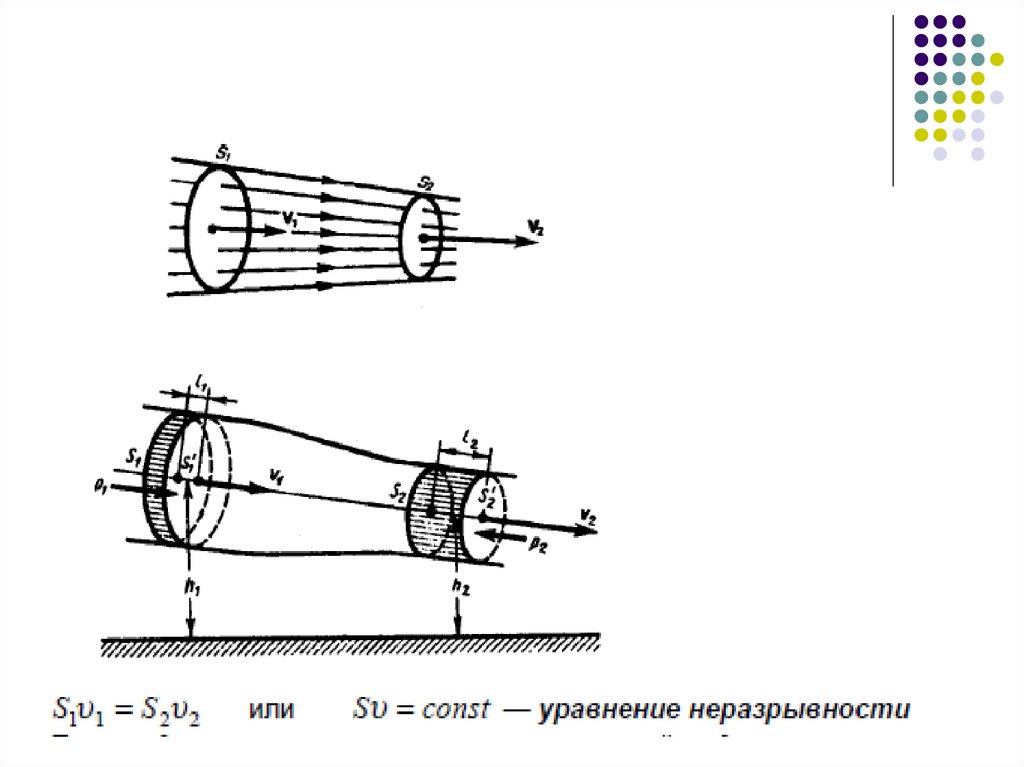
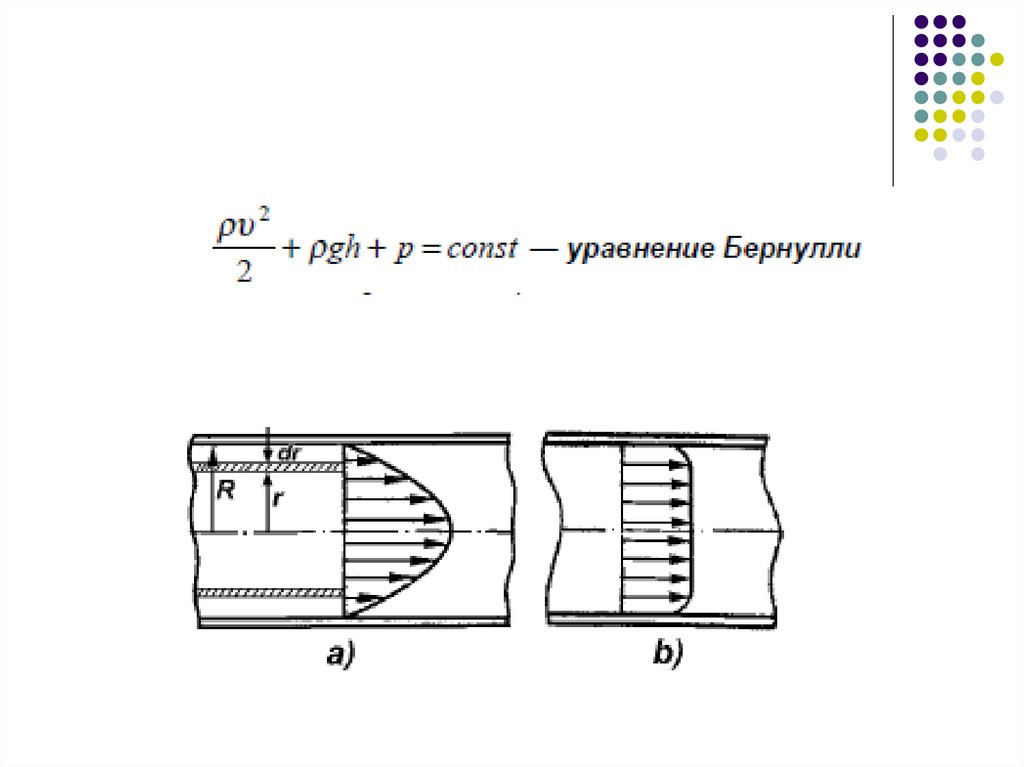
Элементы механики жидкостей60.
61.
62.
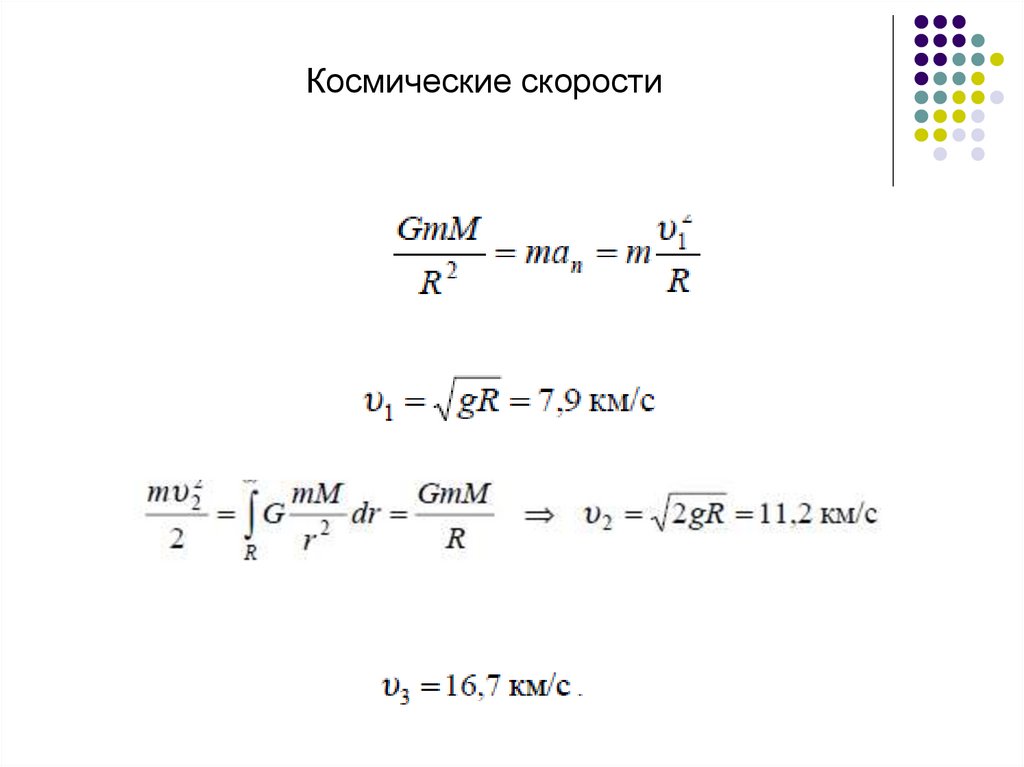
Напряженность поля тяготения63.
Космические скорости64.
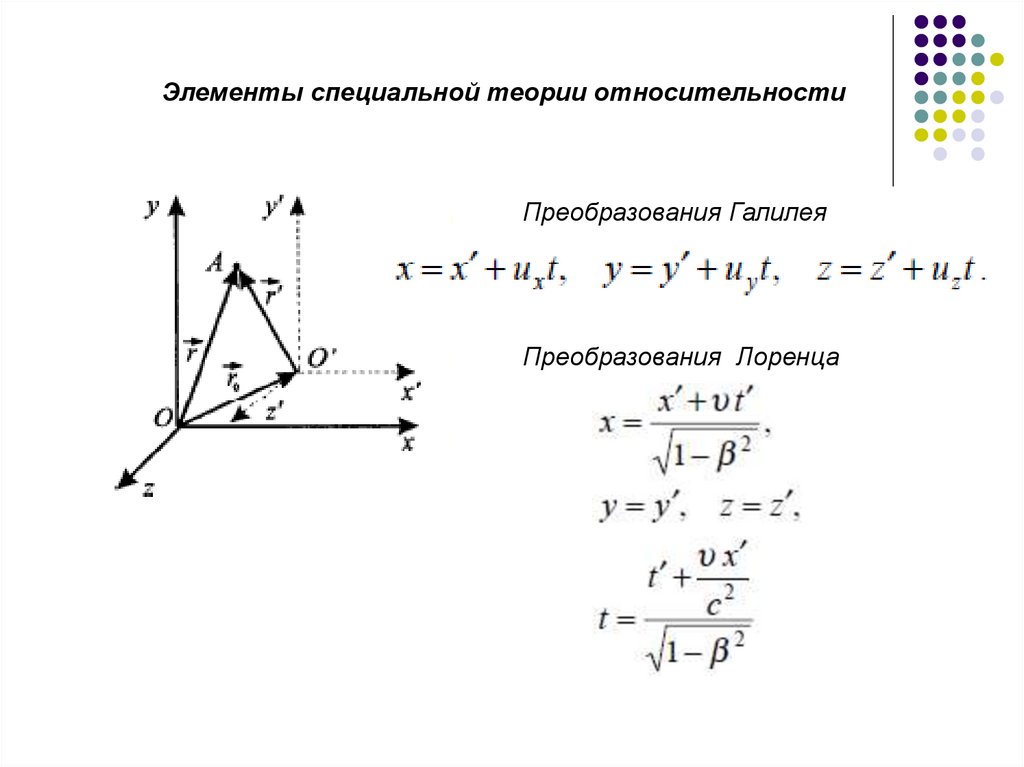
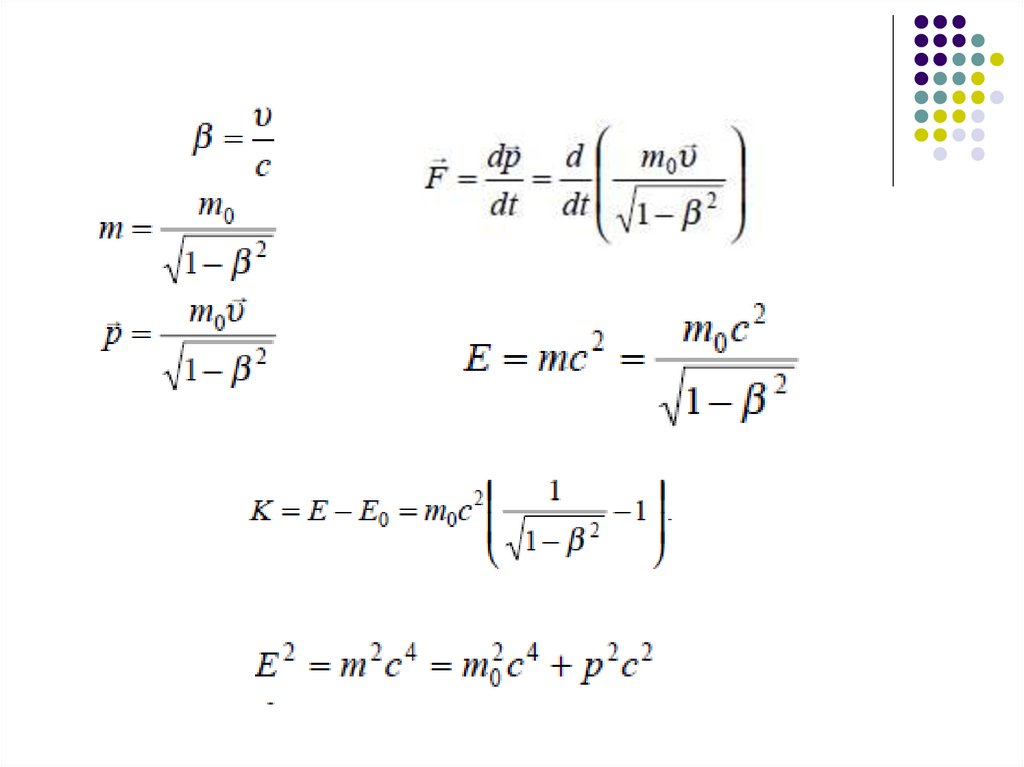
Элементы специальной теории относительностиПреобразования Галилея
Преобразования Лоренца