



 Физика
Физика Механика
МеханикаПохожие презентации:


")







Механика. Лекция 1. Кинематика материальной точки и вращательного движения твердого тела
1.
Лекция по теме:КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ И
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
2.
2. Модели в механике. Система отсчета.Материальная точка. Траектория, длина
пути. Вектор перемещения.
Механическое
движение – изменение положения
тела относительно других тел с течением времени.
Для описания движения тел, в зависимости от условий
конкретных задач, в механике используются различные
физические модели, в которых из всего многообразия
проявлений движения выделены главные, определяющие
характер движения. Простейшей моделью является
материальная точка.
Материальная точка – это модель тела, размерами
и формой которого можно пренебречь по сравнению
с масштабами движения.
3.
2. Модели в механике. Система отсчета.Материальная точка. Траектория, длина
пути. Вектор перемещения.
При взаимодействии тел друг с другом они могут
деформироваться, то есть изменять свою форму и размеры.
Поэтому в механике вводится еще одна модель – абсолютно
твердое тело. Абсолютно твердым телом называется тело,
которое ни при каких условиях не может деформироваться, и при
всех условиях расстояние между двумя частицами этого тела
остается постоянным.
Любое движение твердого тела можно представить как
комбинацию поступательного и вращательного движения.
Поступательное движение – это движение, при котором любая
прямая жестко связанная с движущимся телом, остается
параллельной
своему
первоначальному
положению.
Вращательное движение – это движение, при котором все точки
тела движутся по окружностям, центры которых лежат на одной
прямой, называемой осью вращения.
4.
2. Модели в механике. Система отсчета.Материальная точка. Траектория, длина
пути. Вектор перемещения.
Движение тел происходит в пространстве и во времени. Поэтому
для описания движения материальной точки надо знать, в каких местах
пространства эта точка находилась и в какие моменты времени она
проходила то или иное положение.
Тела отсчета – тела, относительно которых определяется или
изучается положение данного движущегося тела.
Система отсчета – это тело отсчета, связанная с ним система
координат и способ измерения времени (часы).
Траектория – линия, которую описывает материальная точка в
пространстве при движении. В зависимости от формы траектории
движение может прямолинейным и криволинейным.
Расстояние, пройденное телом, с момента начала отсчета времени,
называется длиной пути. Это длина траектории. Обозначения: L, S, S.
5.
2. Модели в механике. Система отсчета.Материальная точка. Траектория, длина
пути. Вектор перемещения.
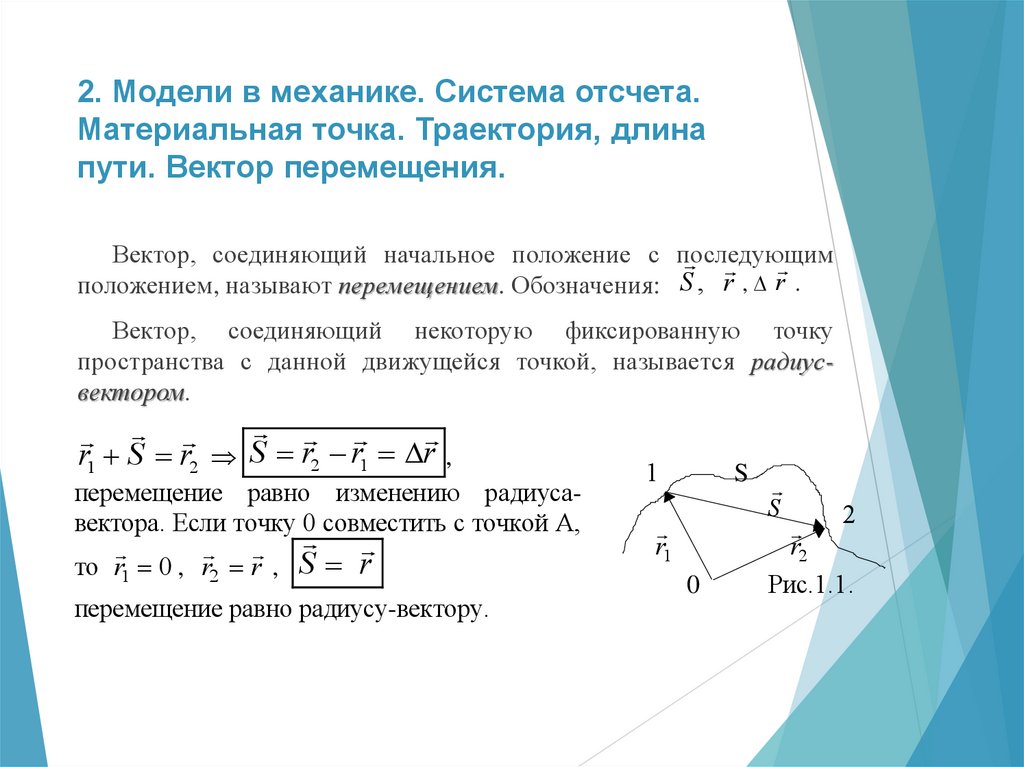
Вектор, соединяющий начальное положение с последующим
положением, называют перемещением. Обозначения: S , r , r .
Вектор, соединяющий некоторую фиксированную точку
пространства с данной движущейся точкой, называется радиусвектором.
r1 S r2 S r2 r1 r ,
перемещение равно изменению радиусавектора. Если точку 0 совместить с точкой А,
то r1 0 , r2 r , S r
перемещение равно радиусу-вектору.
1
S
r1
0
S
2
r2
Рис.1.1.
6.
2. Модели в механике. Система отсчета.Материальная точка. Траектория, длина
пути. Вектор перемещения.
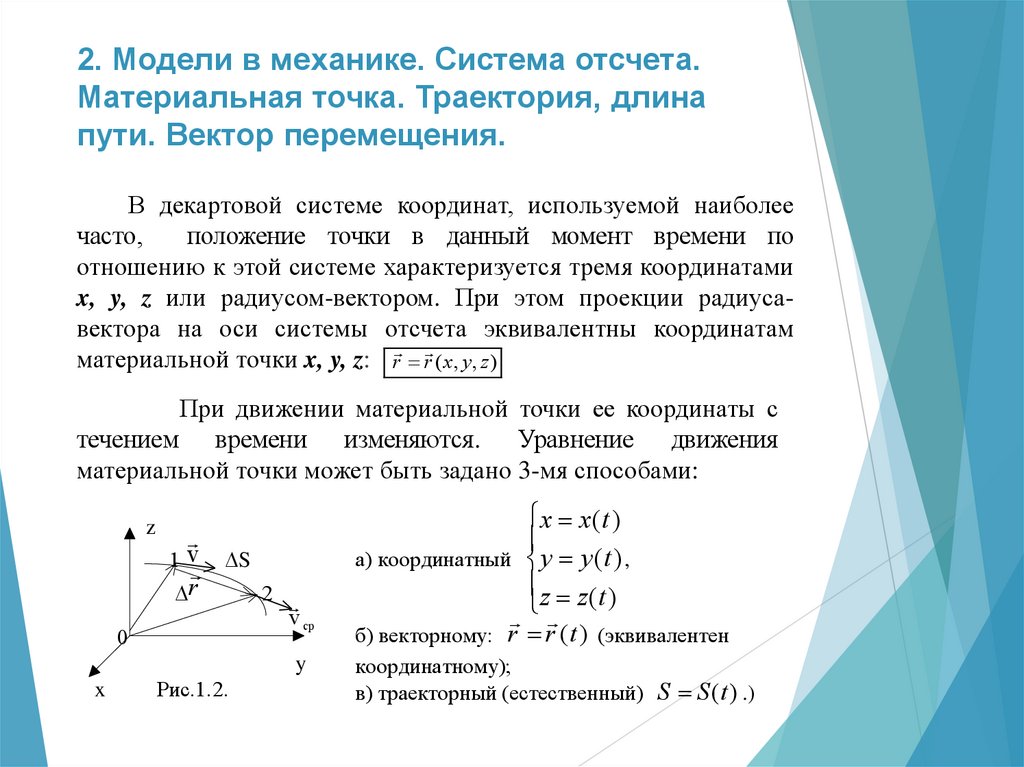
В декартовой системе координат, используемой наиболее
часто,
положение точки в данный момент времени по
отношению к этой системе характеризуется тремя координатами
x, y, z или радиусом-вектором. При этом проекции радиусавектора на оси системы отсчета эквивалентны координатам
материальной точки x, y, z: r r ( x , y , z )
При движении материальной точки ее координаты с
течением времени изменяются. Уравнение движения
материальной точки может быть задано 3-мя способами:
z
v
1
S
r
2
v ср
0
y
x
Рис.1.2.
x x (t )
а) координатный y y ( t ) ,
z z (t )
б) векторному: r r ( t ) (эквивалентен
координатному);
в) траекторный (естественный) S S (t ) .)
7.
3. Кинематика материальной точки.Скорость и ускорение точки.
Кинематика – это раздел механики, изучающий движение тел без
учета взаимодействия, то есть без учета причин, вызывающих это
движение.
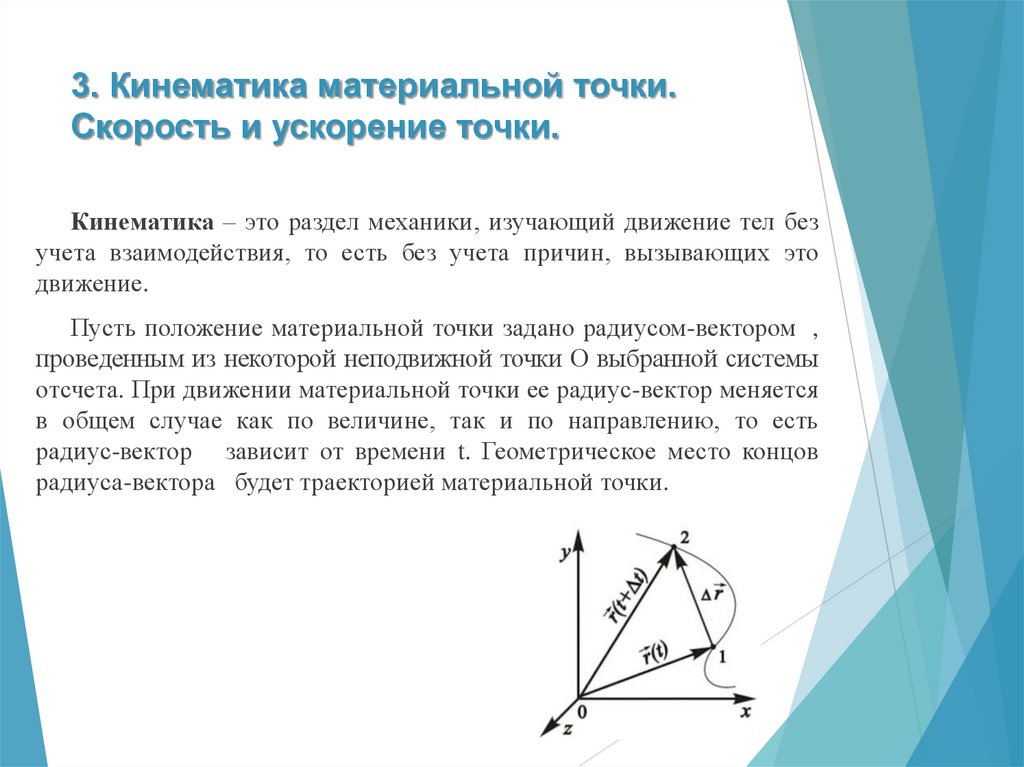
Пусть положение материальной точки задано радиусом-вектором ,
проведенным из некоторой неподвижной точки О выбранной системы
отсчета. При движении материальной точки ее радиус-вектор меняется
в общем случае как по величине, так и по направлению, то есть
радиус-вектор зависит от времени t. Геометрическое место концов
радиуса-вектора будет траекторией материальной точки.
8.
3. Кинематика материальной точки.Скорость и ускорение точки.
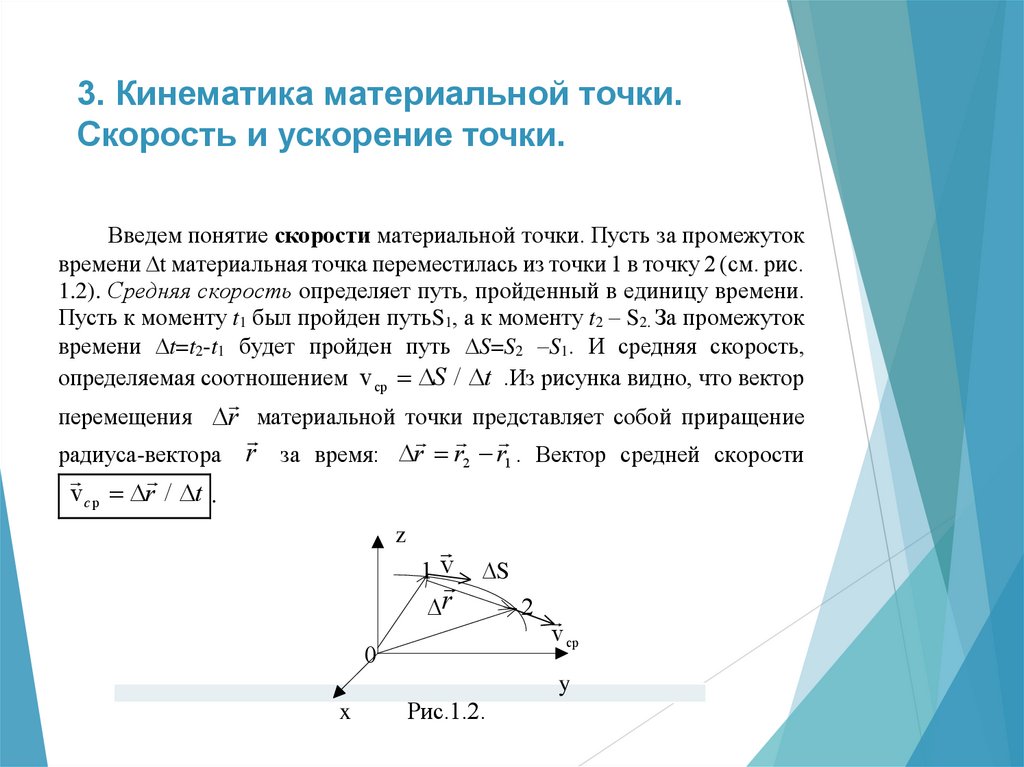
Введем понятие скорости материальной точки. Пусть за промежуток
времени t материальная точка переместилась из точки 1 в точку 2 (см. рис.
1.2). Средняя скорость определяет путь, пройденный в единицу времени.
Пусть к моменту t1 был пройден путьS1, а к моменту t2 – S2. За промежуток
времени t=t2-t1 будет пройден путь S=S2 –S1. И средняя скорость,
определяемая соотношением v ср S / t .Из рисунка видно, что вектор
перемещения r материальной точки представляет собой приращение
радиуса-вектора
v с р r / t .
r за время: r r2 r1 . Вектор средней скорости
z
v
1
S
r
2
v ср
0
y
x
Рис.1.2.
9.
3. Кинематика материальной точки.Скорость и ускорение точки.
Вектор v ср совпадает по направлению с вектором r . Определим вектор
скорости материальной точки как предел отношения r / t при t 0, то
есть
r
dr
v = lim
.
t 0 t
dt
Это значит, что вектор скорости материальной точки в данный
момент времени равен производной от радиуса-вектора r по времени и
направлен по касательной к траектории в данной точке в сторону
движения материальной точки. Модуль вектора v = dr / dt .
10.
3. Кинематика материальной точки.Скорость и ускорение точки.
В классической механике состояние частицы или
материальной точки в момент времени при координатном способе
характеризуется тремя координатами и тремя компонентами
скорости, причем предполагается, что все шесть величин в
указанный момент можно найти на опыте с любой степенью
точности.
Другим понятием, характеризующим движение точки, является
ускорение.
Ускорение
–
это
физическая
величина,
характеризующая быстроту изменения скорости
11.
3. Кинематика материальной точки.Скорость и ускорение точки.
Среднее ускорение – это отношения изменения скорости ко времени,
за которое это изменение произошло: а ср v / t . Вектор среднего
ускорения: а ср v / t , (где v = v 2 v 1 )– вектор изменения скорости
за промежуток времени t. Переходя к пределу, получим вектор
мгновенного ускорения:
v dv
a = lim
, т.е. вектор ускорения
t 0 t
dt
материальной точки равен производной от скорости по времени.
Направление вектора ускорения совпадает с направлением вектора d v
(приращение вектора v за время dt).
12.
3. Кинематика материальной точки.Скорость и ускорение точки.
При использовании для описания движения прямоугольной
декартовой системы координат положение материальной точки задается
тремя координатами x, y, z. При движении точки эти координаты
изменяются во времени и, следовательно ее движение описывается тремя
уравнениями x(t), y(t), z(t). В этом случае вектор скорости может быть
разложен на три взаимно перпендикулярные компоненты: v x dx / dt ;
v y dy / dt ;
2
2
2
v z dz / dt , причем v = v x v y v z , а вектор
ускорения – на компоненты: a x dv x / dt ; a y dv y / dt ; a z dv z / dt ,
причем a =
a x2 a y2 a z2 .
13.
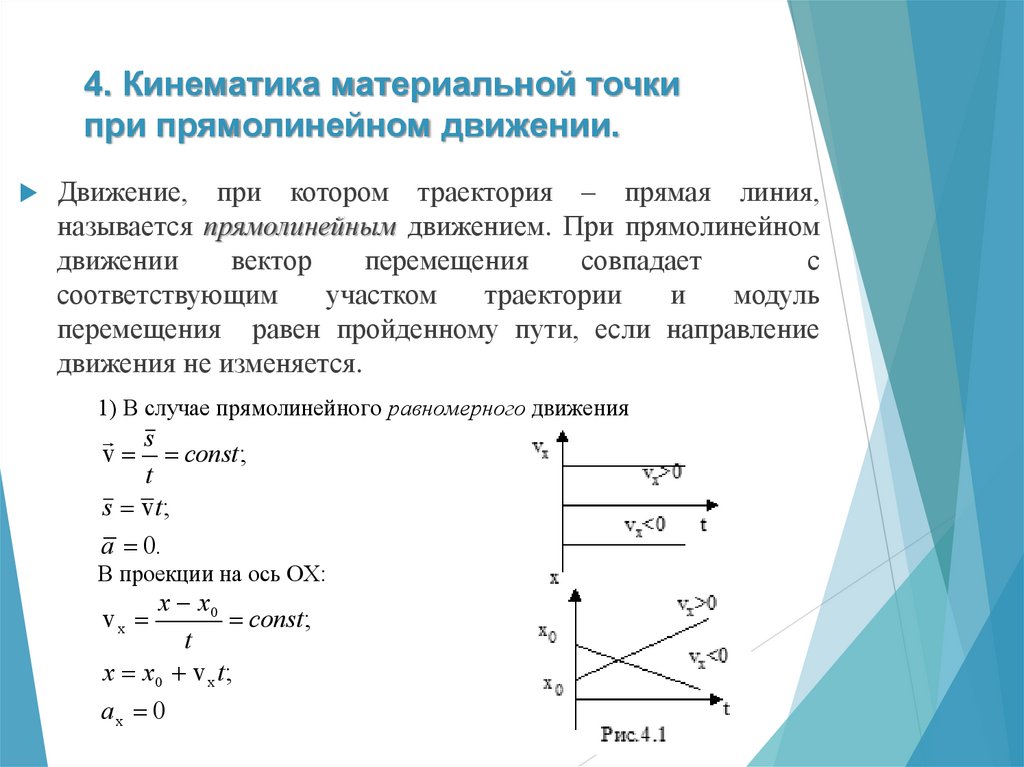
4. Кинематика материальной точкипри прямолинейном движении.
Движение, при котором траектория – прямая линия,
называется прямолинейным движением. При прямолинейном
движении
вектор
перемещения
совпадает
с
соответствующим
участком
траектории
и
модуль
перемещения равен пройденному пути, если направление
движения не изменяется.
1) В случае прямолинейного равномерного движения
s
v const ;
t
s vt ;
a 0.
В проекции на ось ОХ:
x x0
const ;
t
x x0 v x t;
ax 0
vx
14.
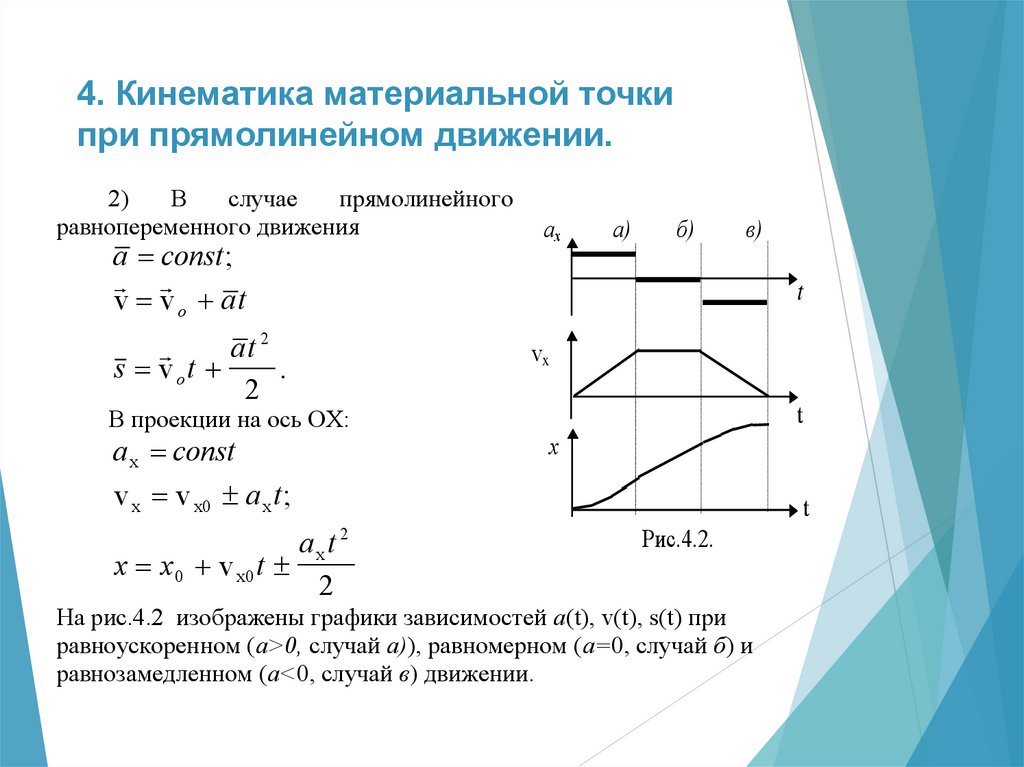
4. Кинематика материальной точкипри прямолинейном движении.
2)
В
случае
прямолинейного
равнопеременного движения
a const ;
v v o at
aх
a)
б)
в)
t
2
at
s vot
.
2
В проекции на ось ОХ:
a x const
v x v x0 a x t ;
axt 2
x x 0 v x0 t
2
vx
t
x
t
Рис.4.2.
На рис.4.2 изображены графики зависимостей а(t), v(t), s(t) при
равноускоренном (а>0, случай а)), равномерном (а=0, случай б) и
равнозамедленном (а<0, случай в) движении.
15.
4. Кинематика материальной точкипри прямолинейном движении.
y
vy
A
0
v
B
vх
x
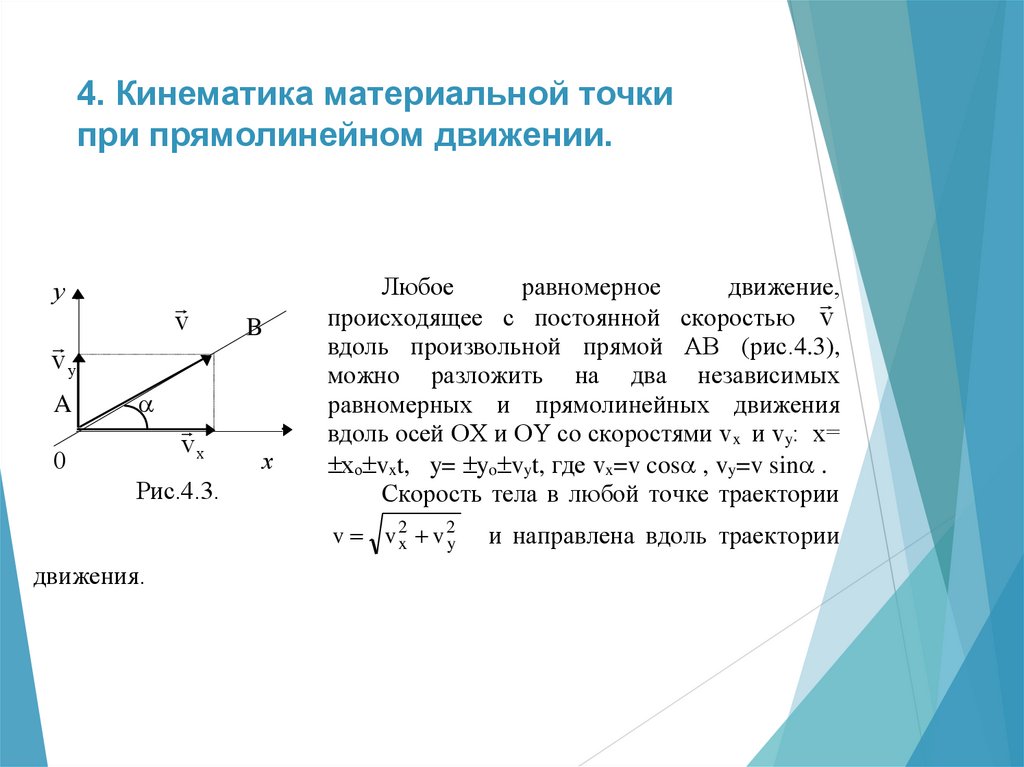
Рис.4.3.
Любое
равномерное
движение,
происходящее с постоянной скоростью v
вдоль произвольной прямой АВ (рис.4.3),
можно разложить на два независимых
равномерных и прямолинейных движения
вдоль осей ОХ и ОY со скоростями vx и vy: х=
хо vxt, y= yo vyt, где vx=v cos , vy=v sin .
Скорость тела в любой точке траектории
v v 2x v 2y
движения.
и направлена вдоль траектории
16.
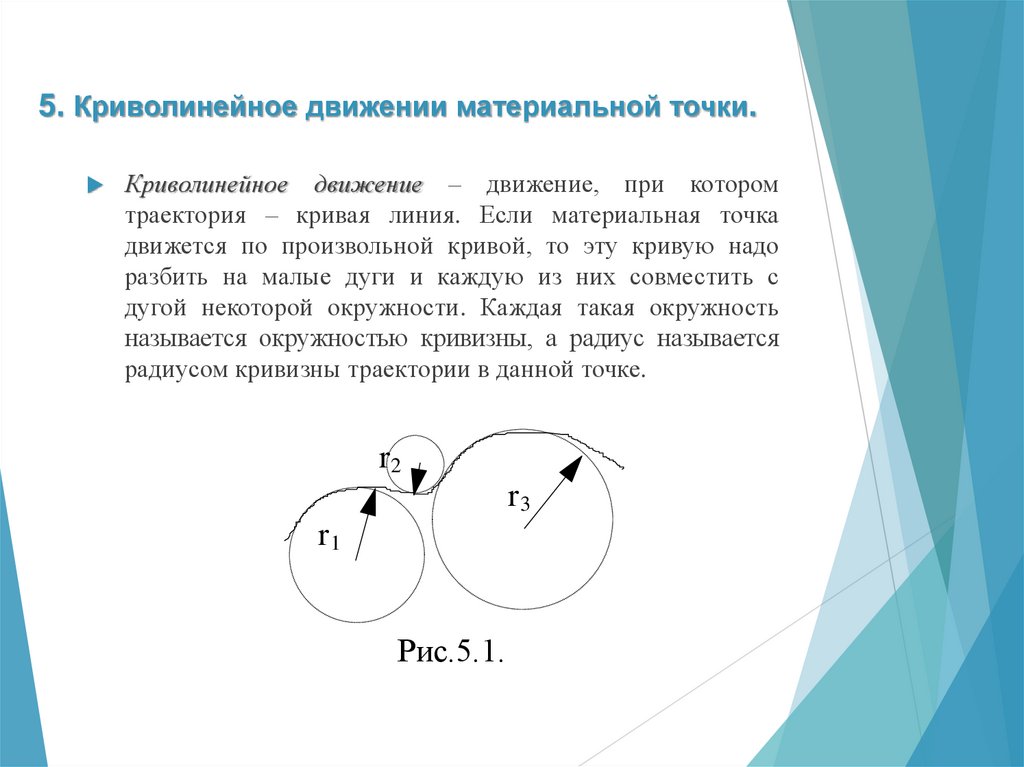
5. Криволинейное движении материальной точки.Криволинейное движение – движение, при котором
траектория – кривая линия. Если материальная точка
движется по произвольной кривой, то эту кривую надо
разбить на малые дуги и каждую из них совместить с
дугой некоторой окружности. Каждая такая окружность
называется окружностью кривизны, а радиус называется
радиусом кривизны траектории в данной точке.
r2
r3
r1
Рис.5.1.
17.
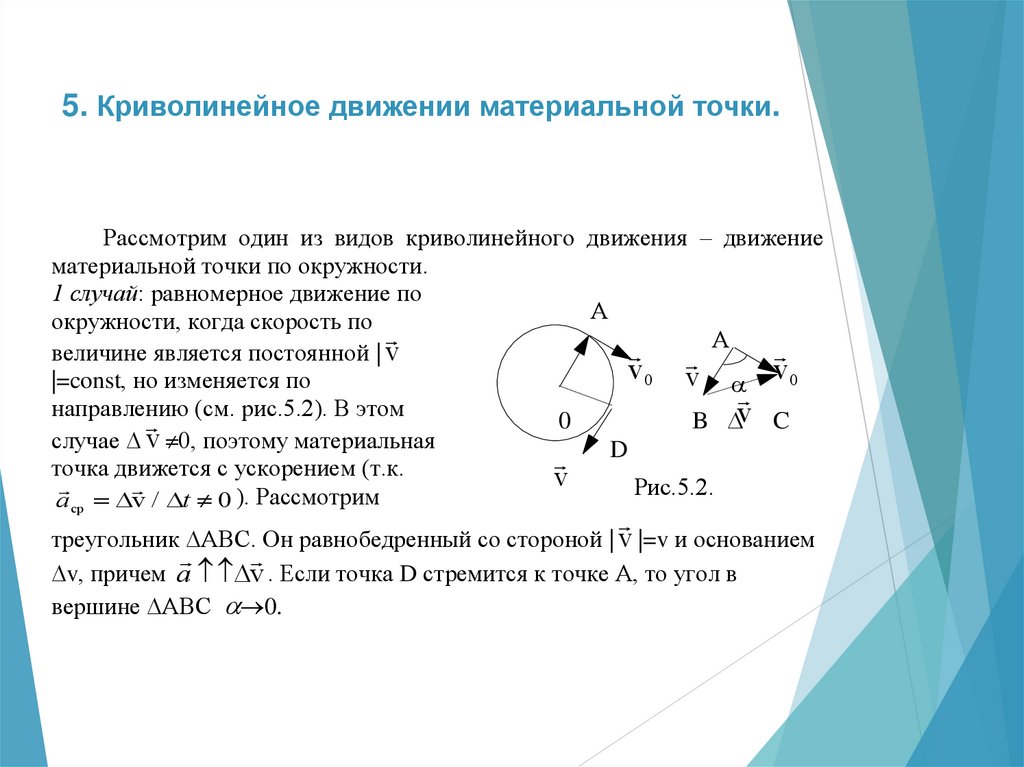
5. Криволинейное движении материальной точки.Рассмотрим один из видов криволинейного движения – движение
материальной точки по окружности.
1 случай: равномерное движение по
А
окружности, когда скорость по
А
величине является постоянной | v
v
v
0
0
v
|=const, но изменяется по
направлению (см. рис.5.2). В этом
v
0
B C
случае v 0, поэтому материальная
D
точка движется с ускорением (т.к.
v
Рис.5.2.
).
Рассмотрим
а ср v / t 0
треугольник АВС. Он равнобедренный со стороной | v |=v и основанием
v, причем a v . Если точка D стремится к точке А, то угол в
вершине АВС 0.
18.
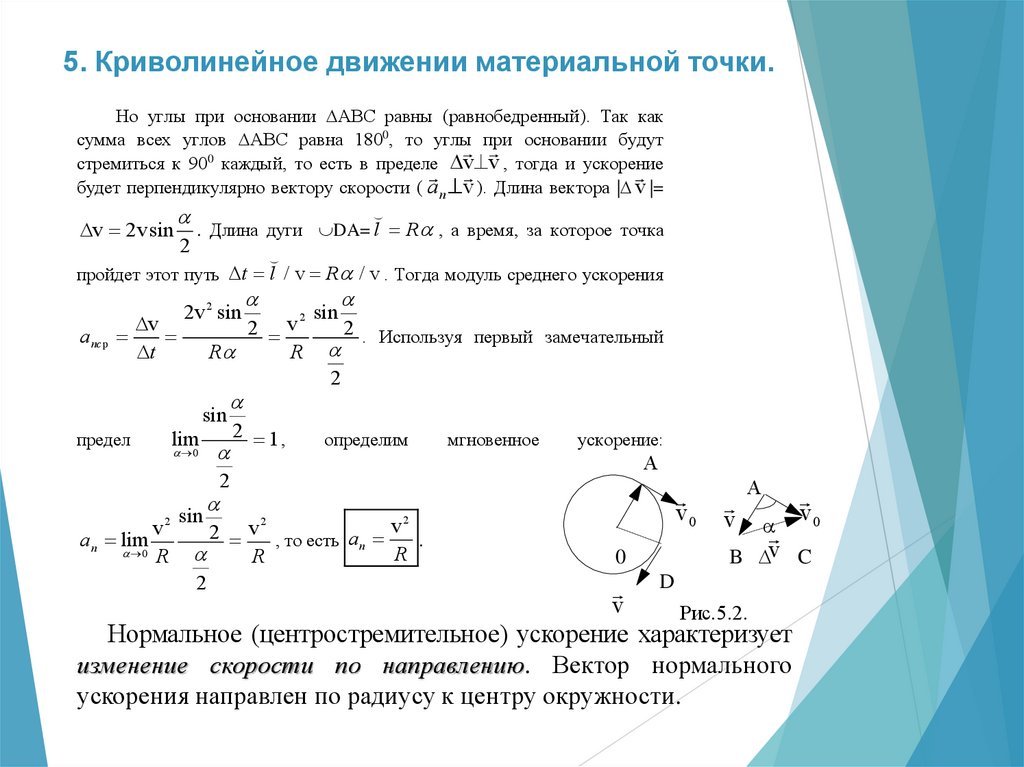
5. Криволинейное движении материальной точки.Но углы при основании АВС равны (равнобедренный). Так как
сумма всех углов АВС равна 1800, то углы при основании будут
стремиться к 900 каждый, то есть в пределе v v , тогда и ускорение
будет перпендикулярно вектору скорости ( a n v ). Длина вектора | v |=
v 2 v sin
2
. Длина дуги DA= l R , а время, за которое точка
пройдет этот путь t l / v R / v . Тогда модуль среднего ускорения
a nс р
v
t
2 v 2 sin
lim
0
2 sin
v
a n lim
0 R
2
2 v
R
R
sin
предел
2 1,
sin
2 . Используя первый замечательный
2
определим
мгновенное
ускорение:
А
2
2
2
2 v , то есть a v .
n
R
R
2
v0
0
v
А
v
0
B v C
v
D
Рис.5.2.
Нормальное (центростремительное) ускорение характеризует
изменение скорости по направлению. Вектор нормального
ускорения направлен по радиусу к центру окружности.
19.
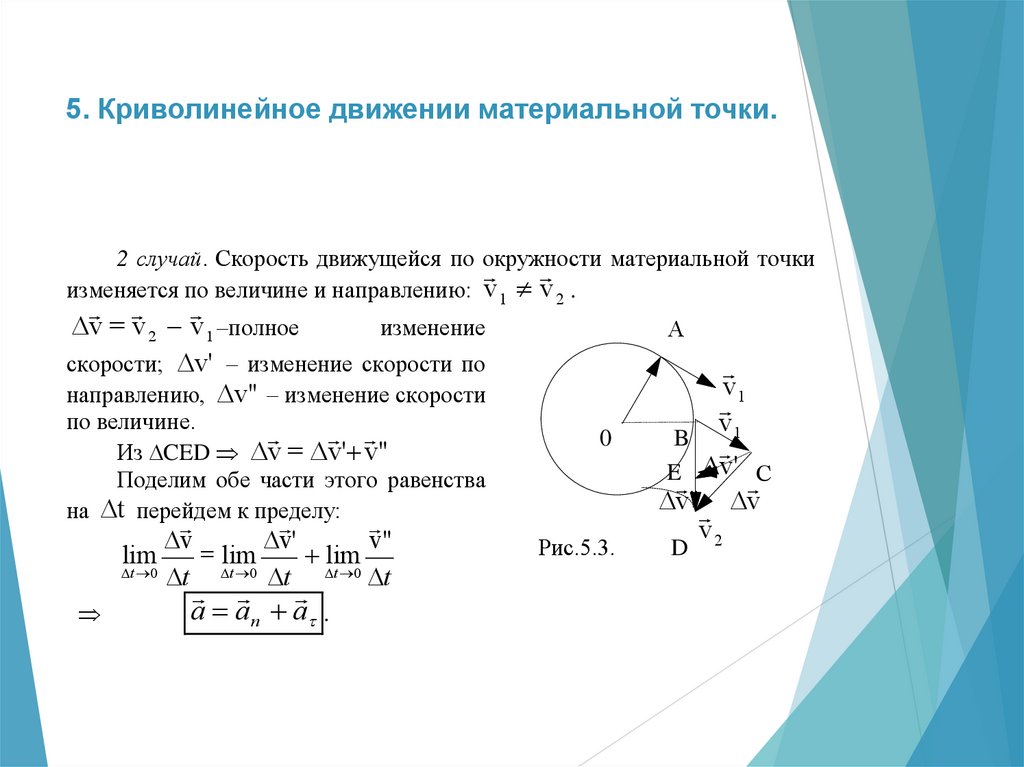
5. Криволинейное движении материальной точки.2 случай. Скорость движущейся по окружности материальной точки
изменяется по величине и направлению: v 1 v 2 .
v = v 2 v 1 –полное
изменение
скорости; v' – изменение скорости по
направлению, v" – изменение скорости
по величине.
Из CED v = v' v"
А
0
Поделим обе части этого равенства
на t перейдем к пределу:
v
v'
v"
lim
= lim
lim
t 0
t t 0 t t 0 t
a a n a .
Рис.5.3.
v1
v1
B
E v' С
v" v
v2
D
20.
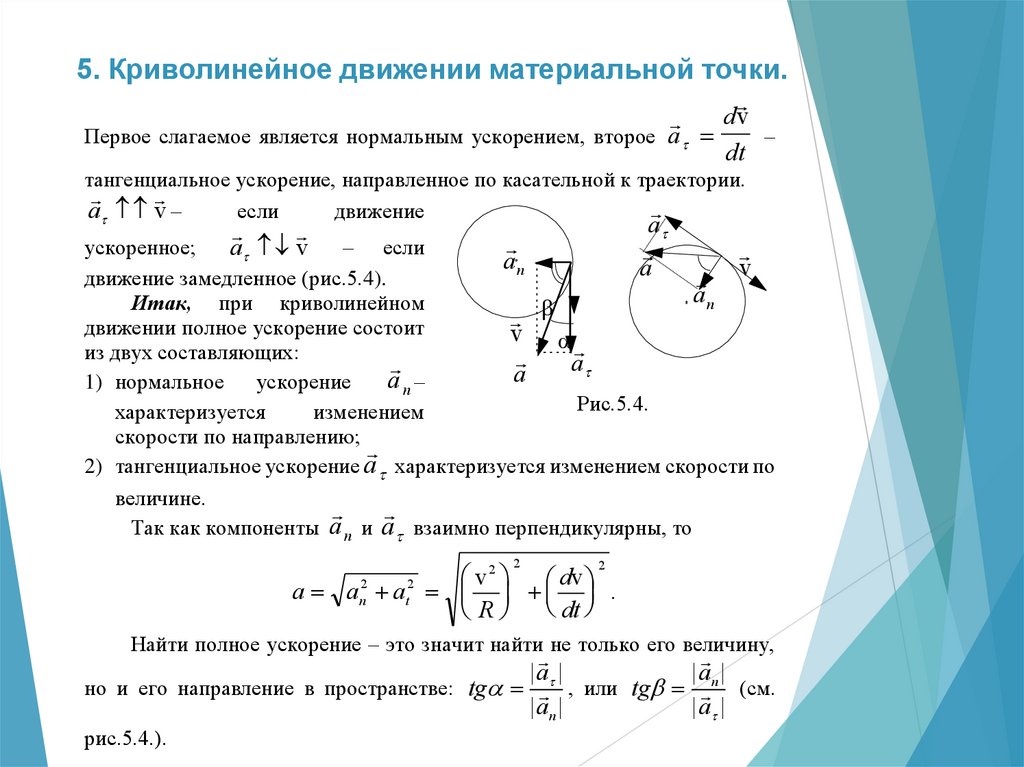
5. Криволинейное движении материальной точки.dv
Первое слагаемое является нормальным ускорением, второе a
–
dt
тангенциальное ускорение, направленное по касательной к траектории.
если
движение
a v –
a
ускоренное;
a v – если
an
a
v
движение замедленное (рис.5.4).
a
n
Итак, при криволинейном
движении полное ускорение состоит
v
из двух составляющих:
a
a
an–
1) нормальное
ускорение
Рис.5.4.
характеризуется
изменением
скорости по направлению;
2) тангенциальное ускорение a характеризуется изменением скорости по
величине.
Так как компоненты a n и a взаимно перпендикулярны, то
2
2
v2
dv
2
2
a an at .
dt
R
Найти полное ускорение – это значит найти не только его величину,
| a |
|an |
но и его направление в пространстве: tg , или tg (см.
| an |
| a |
рис.5.4.).
21.
6. Вращение твердого тела вокруг неподвижнойоси.
Связь между линейными и угловыми величинами.
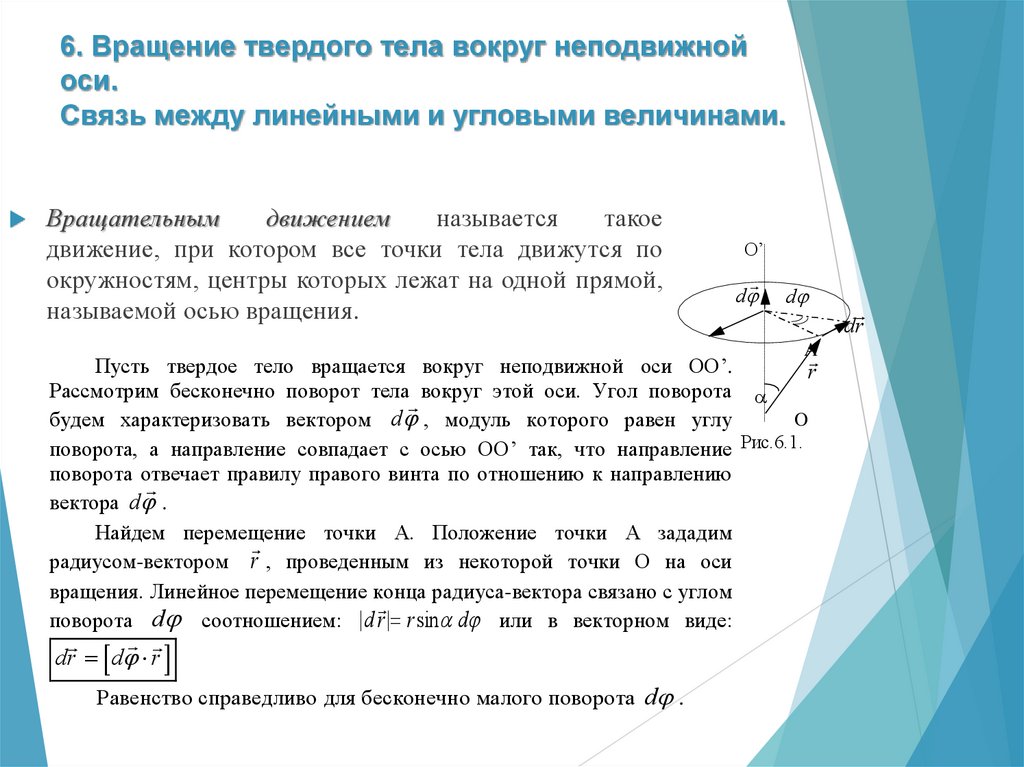
Вращательным
движением
называется
такое
движение, при котором все точки тела движутся по
окружностям, центры которых лежат на одной прямой,
называемой осью вращения.
О’
d
d
A
Пусть твердое тело вращается вокруг неподвижной оси ОО’.
r
Рассмотрим бесконечно поворот тела вокруг этой оси. Угол поворота
O
будем характеризовать вектором d , модуль которого равен углу
поворота, а направление совпадает с осью ОО’ так, что направление Рис.6.1.
поворота отвечает правилу правого винта по отношению к направлению
вектора d .
Найдем перемещение точки А. Положение точки А зададим
радиусом-вектором r , проведенным из некоторой точки О на оси
вращения. Линейное перемещение конца радиуса-вектора связано с углом
поворота d соотношением: |d r | r sin d или в векторном виде:
dr d r
Равенство справедливо для бесконечно малого поворота d .
dr
22.
6. Вращение твердого тела вокруг неподвижнойоси.
Связь между линейными и угловыми величинами.
Векторы, направление которых связывают с направлением вращения,
называют аксиальными. Вектор d является аксиальным.
Введем векторы угловой скорости и углового ускорения.
d
Вектор угловой скорости определяют как:
. Вектор
dt
совпадает по направлению с вектором d и представляет собой
аксиальный вектор.
Изменение вектора
со временем характеризуется вектором
d
углового ускорения , который определяют как
. Направление
dt
вектора совпадает с направлением d – приращением вектора .
Вектор также является аксиальным.
При равномерном вращении 0 и const . 0 t , где
о– начальное угловое перемещение.
23.
6. Вращение твердого тела вокруг неподвижнойоси.
Связь между линейными и угловыми величинами.
Вращательное движение характеризуется периодом Т и частотой
вращения n.
1
N
, или n , где N – число оборотов,
T
t
совершаемых телом за время t; T - период вращения (время одного полного
Частота вращения n
оборота).
Для угловых перемещения и скорости: 2 N ; 2 N .
При равнопеременном ( =соnst) вращении 0 t ,
0 0 t t 2 / 2 , где 0 – начальная угловая скорость.
24.
6. Вращение твердого тела вокруг неподвижнойоси.
Связь между линейными и угловыми величинами.
Установим связь между линейными и угловыми величинами.
Найдем скорость v произвольной точки А твердого тела, которое
вращается вокруг оси с угловой скоростью . Формулу dr d r
поделим на соответствующий промежуток dt:
тогда
v r
dr
d
v и
,
dt
dt
(*).
Т.е. скорость v любой точки А твердого тела, вращающегося с
угловой скоростью , равна векторному произведению на радиус
вектор r точки А относительно произвольной точки О оси вращения.
v r sin R , где R–радиус
Модуль вектора скорости
v R .
окружности, по которой движется точка А. Таким образом,
25.
6. Вращение твердого тела вокруг неподвижнойоси.
Связь между линейными и угловыми величинами.
d dr
Продифференцируем (*) по времени: a
r .
dt dt
dr
d
v = r , то a r r .
Так как
,
dt
dt
Здесь вектор a r – тангенциальное ускорение, а вектор
an r – нормальное ускорение. Модули этих ускорений:
a R ,
Модуль полного ускорения a
an 2 R.
an2 at2 R 2 4 .