




 Промышленность
ПромышленностьПохожие презентации:










Творческий проект "Подводный аппарат для изучения подводных глубин"
1.
2.
Это краткая история создания подводного автономного роботаучеником среднего звена. Текущей целью является создание актуальной
карты фарватера реки - Вычегда. При поиске нет проблем найти такую
карту, но вызывает вопрос ее актуальность. Русло реки постоянно
меняется. Происходит эрозия берегов реки и меняется карта фарватера.
Эти процессы особенно заметны, учитывая питание Вычегды снеговое (61
%), грунтовое (27 %) и дождевое (12 %). Конечной целью является
создание многофункционального подводного робота для исследование
морских глубин. Мировой океан, покрывающий 2/3 поверхности Земли,
изучен всего на 5%. Для создания автономного робота нужен простой
«автопилот».
3.
Техническиехарактеристики:
1) Длина - 37 см
2) Вес: 430 грамм
3) Глубина
погружения –
15м
Технические
характеристики:
1) Длина – ~40см
2) Вес: ~500 гр.
3) Глубина
погружения –
неизвестна
Технические
характеристики:
1) Длина – 1,5м
2) Вес: 15кг
3) Глубина
погружения –
неизвестна
4.
Возможно, было бы эффективнее и проще сделать лодку, нозадача сделать подводного робота кажется намного интереснее и
заманчивее . Просмотрев найденные материалы в интернете, мы
сформулировали перед собой цель: Сконструировать подводный
аппарат размеры ,которого не будут превышать отверстию
стандартного бура, и стоимость не будет выше 20.000руб.
5.
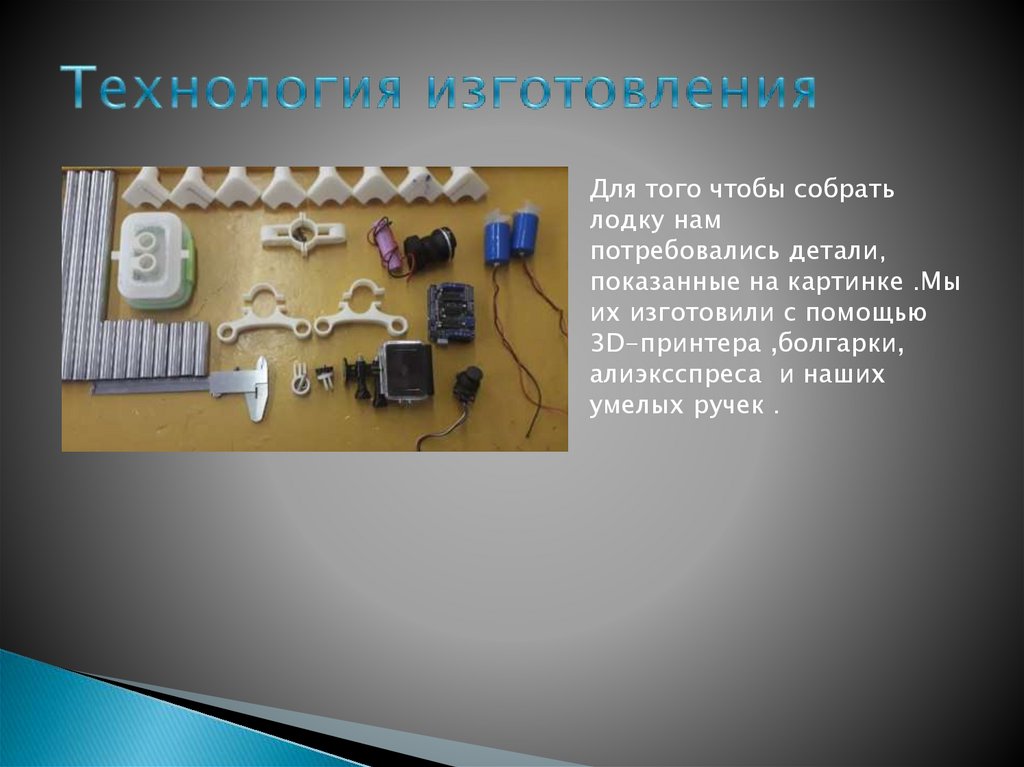
Для того чтобы собратьлодку нам
потребовались детали,
показанные на картинке .Мы
их изготовили с помощью
3D-принтера ,болгарки,
алиэксспреса и наших
умелых ручек .
6.
- Соединяющий,каркасные
трубы, компонент
Текст слайда
Текст слайда
Текст слайда
7.
№1
2
3
4
5
6
7
8
9
10
11
Материал
Кол-во
Фонарь
1
Аккумулятор 3
Водостойкий 1
контейнер
Экшн1
камера
Водостойкие 3
моторы
Труба каркас 1
1,5 метра
Ардуино
1
UNO
Пенопласт
1
Свинец
1
Пластик
1
Набор
1
проводов
Стоимость
500
900
150
3000
2100
170
350
100
100
375
100
Общая стоимость ,с
учетом работы
(5500руб/22 часа)
составляет ~13.400
рублей
8.
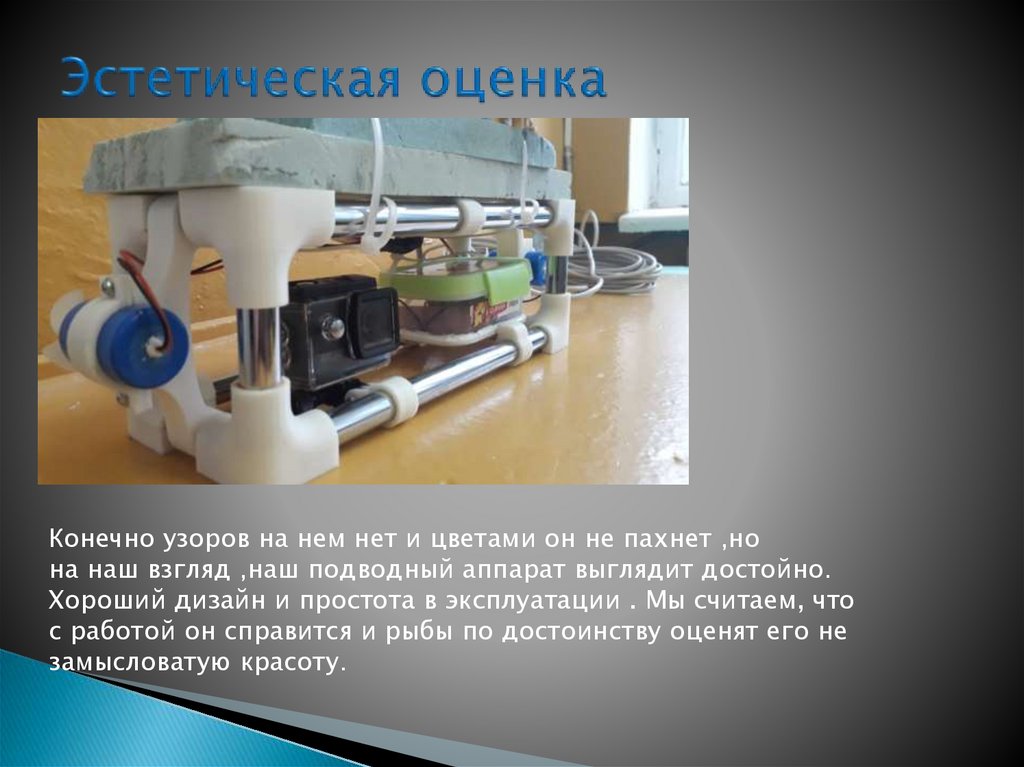
Конечно узоров на нем нет и цветами он не пахнет ,нона наш взгляд ,наш подводный аппарат выглядит достойно.
Хороший дизайн и простота в эксплуатации . Мы считаем, что
с работой он справится и рыбы по достоинству оценят его не
замысловатую красоту.
9.
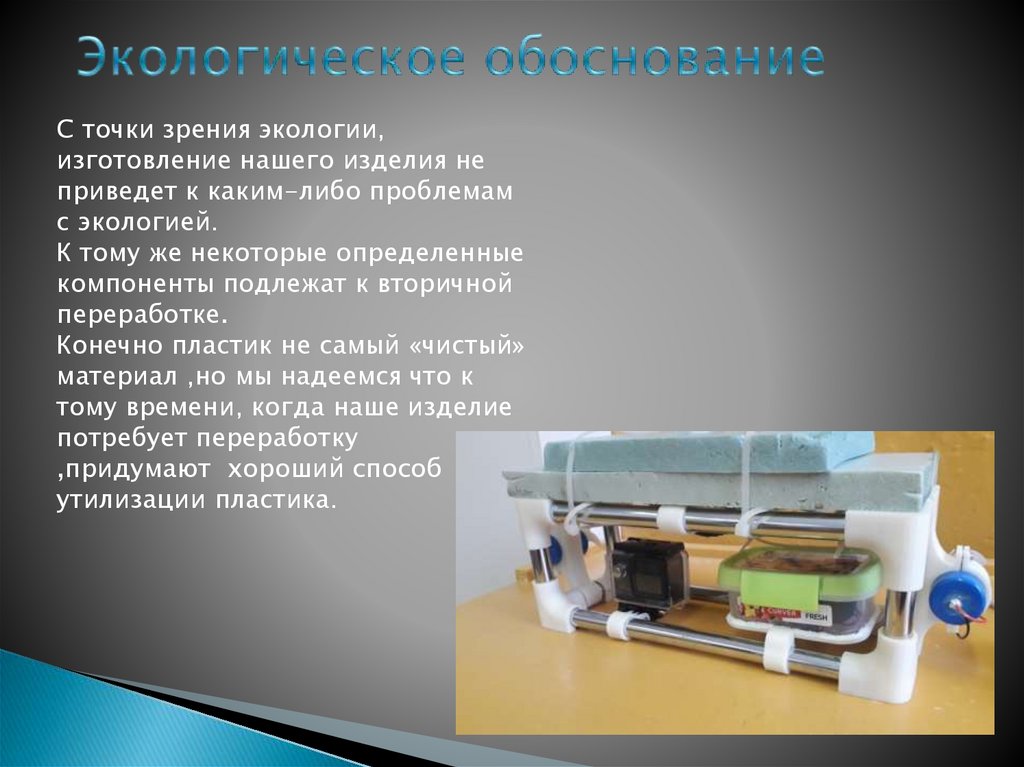
С точки зрения экологии,изготовление нашего изделия не
приведет к каким-либо проблемам
с экологией.
К тому же некоторые определенные
компоненты подлежат к вторичной
переработке.
Конечно пластик не самый «чистый»
материал ,но мы надеемся что к
тому времени, когда наше изделие
потребует переработку
,придумают хороший способ
утилизации пластика.
10.
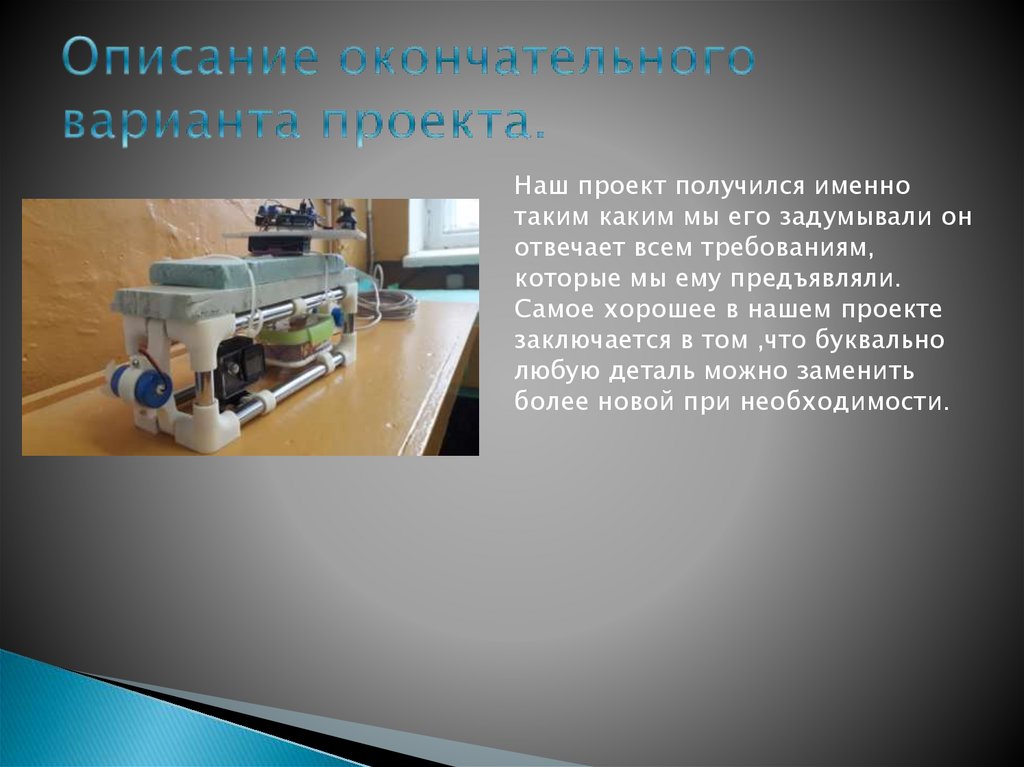
Наш проект получился именнотаким каким мы его задумывали он
отвечает всем требованиям,
которые мы ему предъявляли.
Самое хорошее в нашем проекте
заключается в том ,что буквально
любую деталь можно заменить
более новой при необходимости.
11.
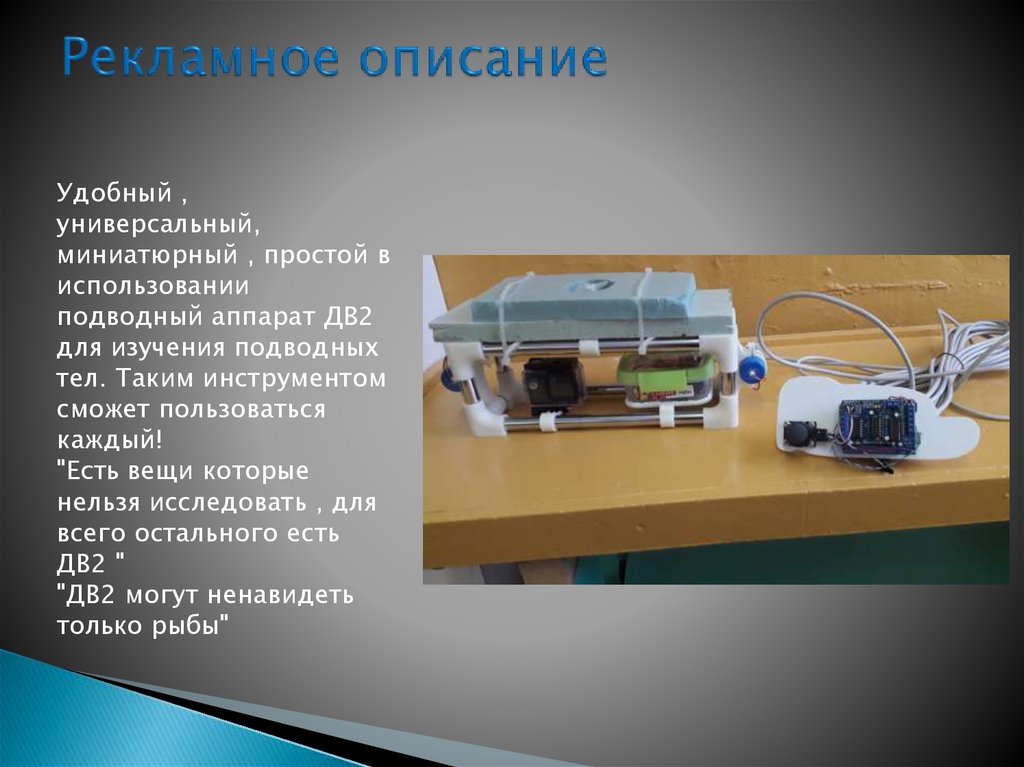
Удобный ,универсальный,
миниатюрный , простой в
использовании
подводный аппарат ДВ2
для изучения подводных
тел. Таким инструментом
сможет пользоваться
каждый!
"Есть вещи которые
нельзя исследовать , для
всего остального есть
ДВ2 "
"ДВ2 могут ненавидеть
только рыбы"
12.
1. Настройка отправки данных по Bluetooth на arduino.2. Получение с arduino данных о глубине.
3. Отправка данных о текущем положении и измерений глубины
на сервер.
4. Доработка конструкции. Возможно изменение размеров путем
изменения месторасположения водостойких двигателей.
5. Авторизировать передвижение ДВ2 , поставив Raspberry Pi 3b+
6. Начинать тестировать в более больших водоемах.