




 Электроника
ЭлектроникаПохожие презентации:










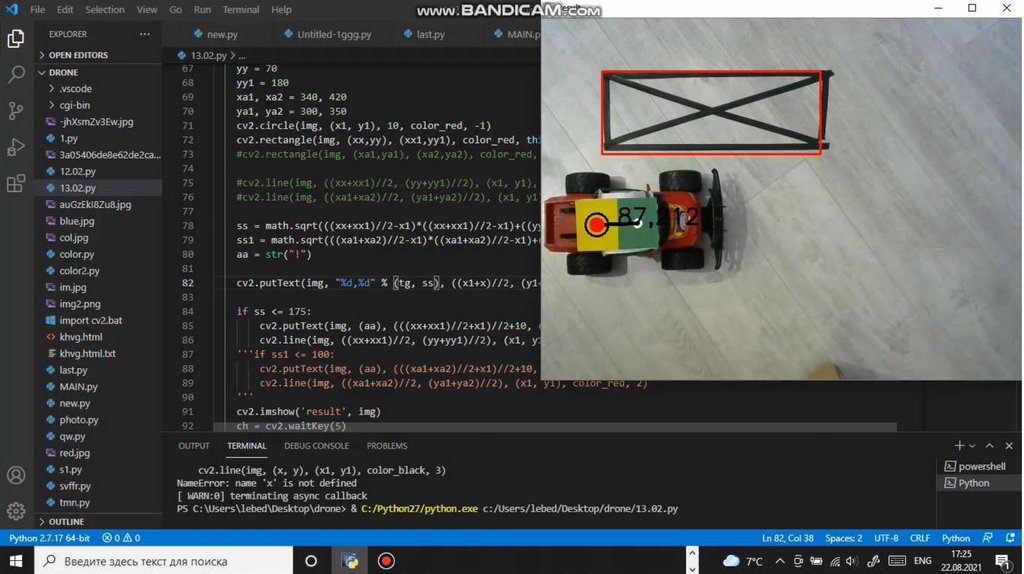
Система позиционирования мобильных манипуляторов в складской ячейке
1.
Система позиционированиямобильных манипуляторов в
складской ячейке
МБОУ Мурманский Политехнический лицей,
Науч. рук.:
Лебедева Наталья Николаевна, учитель информатики
Лебедев Андрей Игоревич
2.
• Разработкой мобильныхавтономных роботов сейчас
занимаются множество ведущих
мировых кампаний. Достаточно
вспомнить, какие инвестиции
вкладывает amazon в разработку и
создание складских и
производственных манипуляторов,
способных работать без участия
людей и самостоятельно
обслуживать огромное количество
продукции. Именно о таких РТК, а
точнее о системах ими
управляющих, и пойдет речь в
моей научной работе.
3.
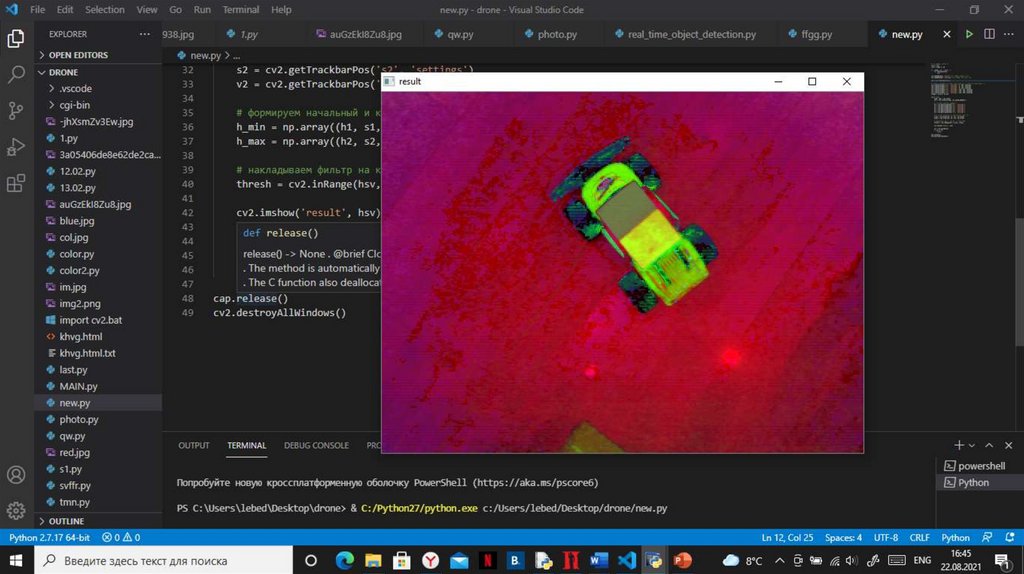
• Для того чтобы робот могсамостоятельно принимать
решения и управлять сам собой без
оператора, ему необходимо
“понимать” где он находится и что
от него требуется на данный
момент. Первичная задача
позиционирования таких умных
комплексов имеет на данный
момент большое количество самых
разных решений: специальные
маркеры и датчики, наносимые на
пол рабочего помещения и
передающие информацию о свое
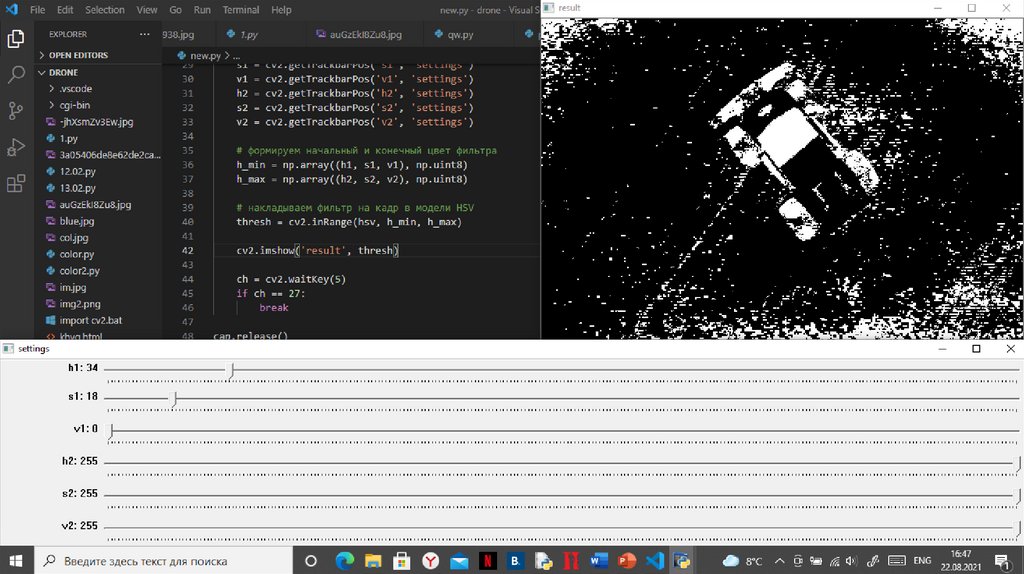
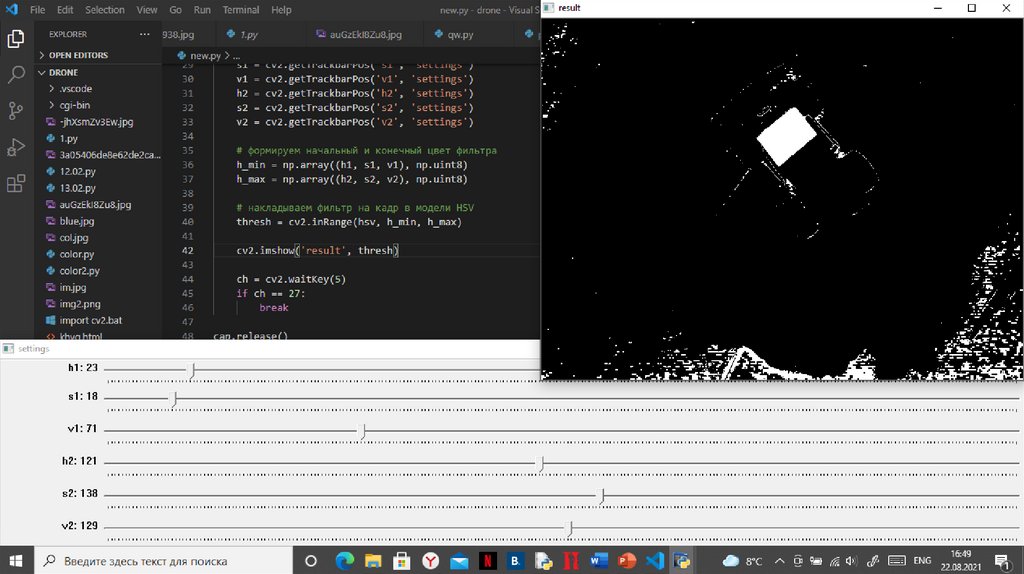
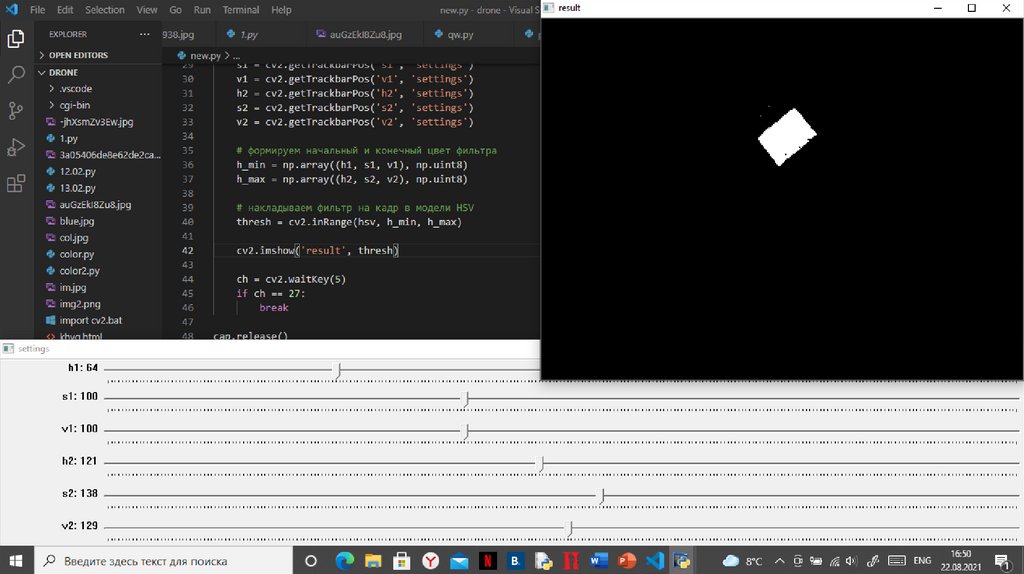
позиции, камеры и системы
компьютерного зрения на самих
роботах, методы нахождения при
помощи беспроводных сетей и
сигналов.