





 Электроника
ЭлектроникаПохожие презентации:

")








Моделирование технологических узлов манипулятора робота в программе компьютерного трехмерного проектирования
1.
Труд/(технология 9 классМоделирование технологических узлов
манипулятора робота в программе
компьютерного трехмерного
проектирования
2.
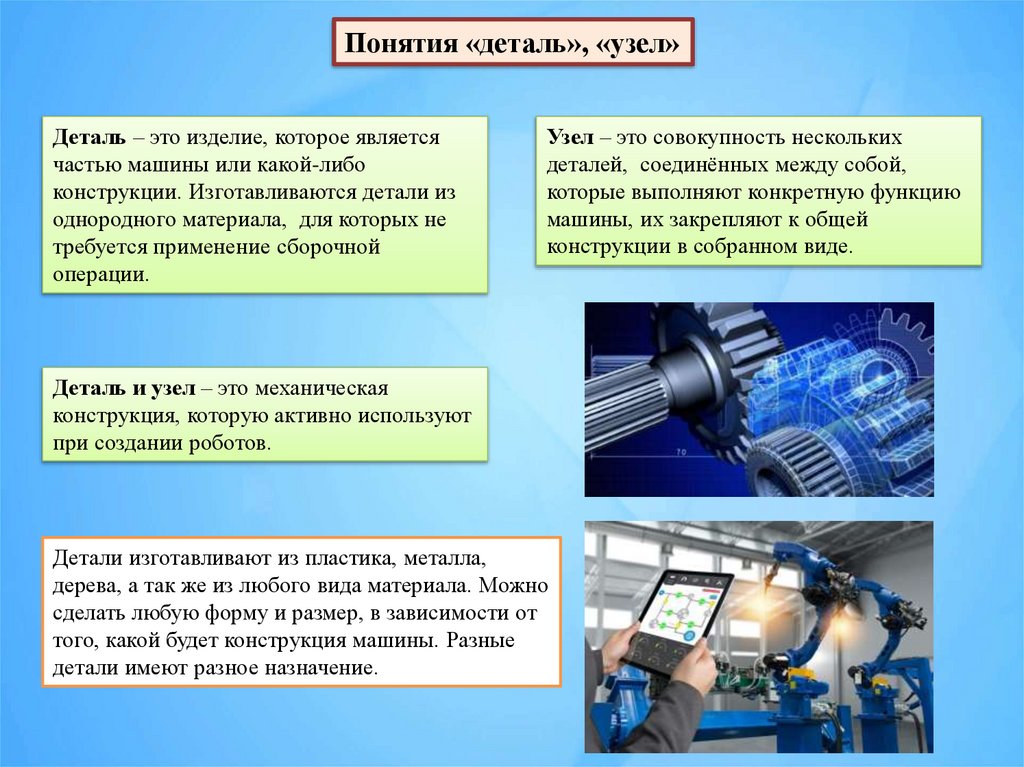
Понятия «деталь», «узел»Деталь – это изделие, которое является
частью машины или какой-либо
конструкции. Изготавливаются детали из
однородного материала, для которых не
требуется применение сборочной
операции.
Узел – это совокупность нескольких
деталей, соединённых между собой,
которые выполняют конкретную функцию
машины, их закрепляют к общей
конструкции в собранном виде.
Деталь и узел – это механическая
конструкция, которую активно используют
при создании роботов.
Детали изготавливают из пластика, металла,
дерева, а так же из любого вида материала. Можно
сделать любую форму и размер, в зависимости от
того, какой будет конструкция машины. Разные
детали имеют разное назначение.
3.
Понятия «робот», «робот-манипулятор»Робот-манипулятор – это тип
промышленного робота. Они могут
выполнять функцию человеческой руки.
При совокупности соединений деталей
манипулятора происходит вращательные и
поступательные движения.
Робот – это устройство, выполняющее
автоматические задачи или по заданной
программе. В роботы встроены камеры
и датчики, для ориентации в пространстве
без помощи человека. Роботов создают,
чтобы облегчить труд человека.
Роботы распознают, понимают и меняют окружающую среду. Каждый год сфера деятельности
роботов расширяется. Внедряют новейшие программы для того, чтобы роботы могли
выполнить более точные действия: собрать автомобиль, отсортировать мусор, выбрать только
спелые плоды при сборе урожая.
4.
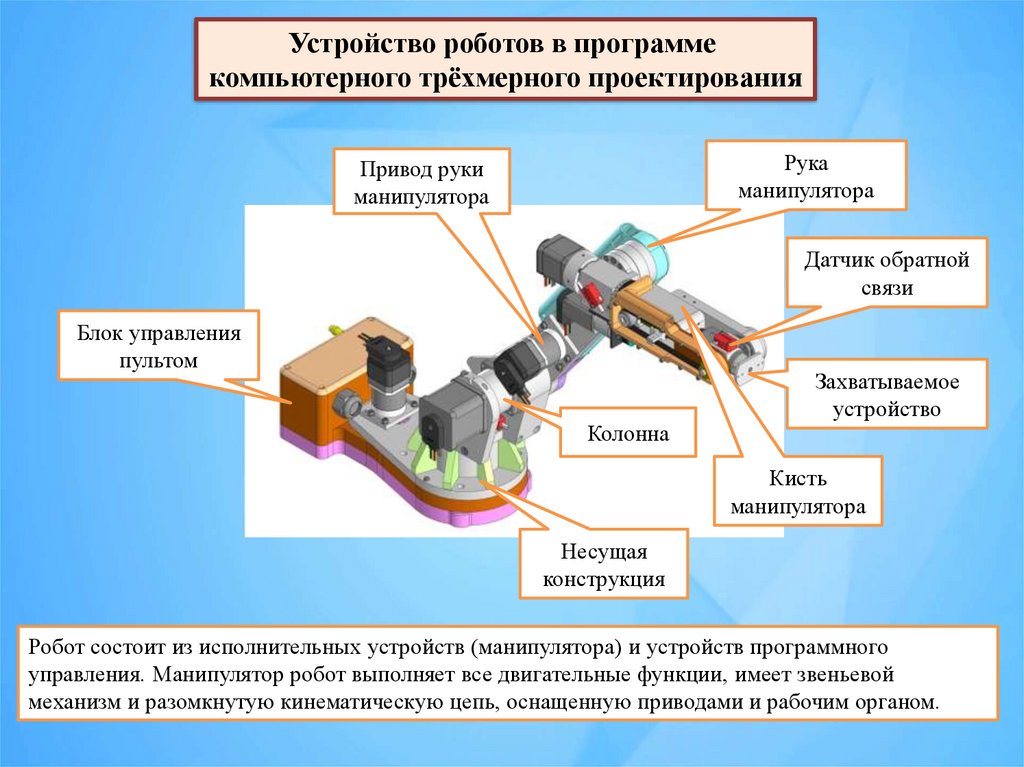
Устройство роботов в программекомпьютерного трёхмерного проектирования
Рука
манипулятора
Привод руки
манипулятора
Датчик обратной
связи
Блок управления
пультом
Колонна
Захватываемое
устройство
Кисть
манипулятора
Несущая
конструкция
Робот состоит из исполнительных устройств (манипулятора) и устройств программного
управления. Манипулятор робот выполняет все двигательные функции, имеет звеньевой
механизм и разомкнутую кинематическую цепь, оснащенную приводами и рабочим органом.
5.
Устройство управления робота в программекомпьютерного трехмерного проектирования
Устройство управления робота – это
формирование и выдача управляющего
воздействия манипулятору в соответствии с
управляющей программой: система управления,
информационно-измерительная система с
устройством обратной связи и система связи.
Опорные, несущие конструкции используются
при размещении всех устройств и агрегатов
робота, обеспечивают необходимую прочность и
жесткость манипулятора. Опорные конструкции
многообразны их выполняют в виде основания,
корпуса, стойки, колонны, металлоконструкции,
тележки, портала и т. п.
6.
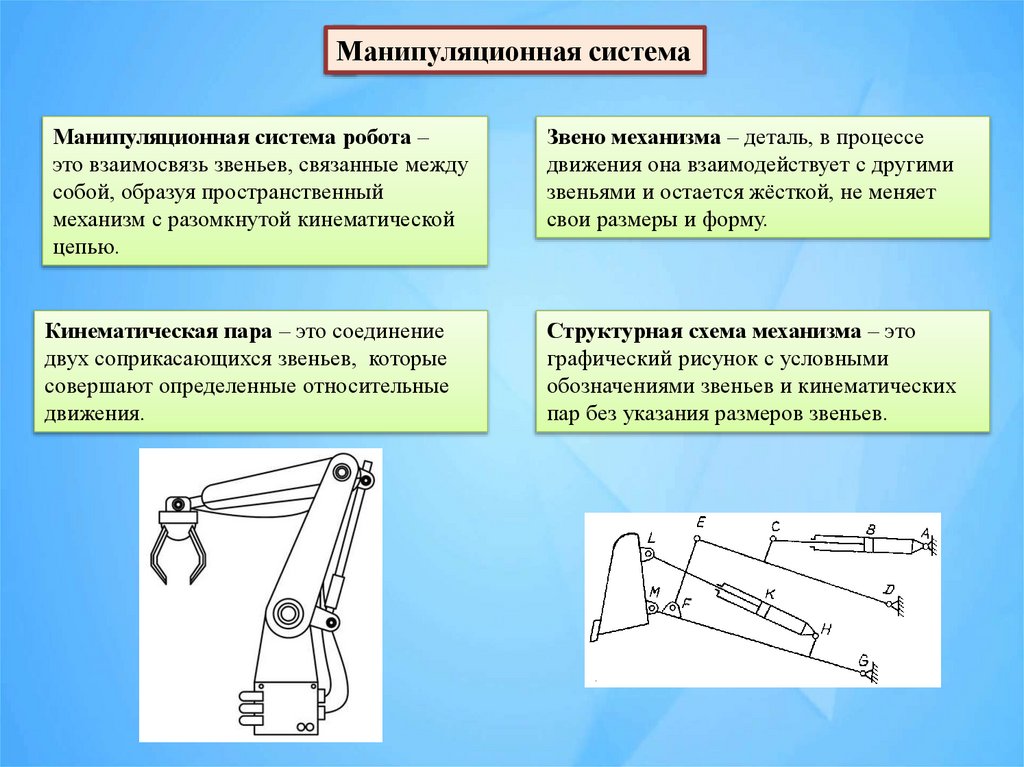
Манипуляционная системаМанипуляционная система робота –
это взаимосвязь звеньев, связанные между
собой, образуя пространственный
механизм с разомкнутой кинематической
цепью.
Звено механизма – деталь, в процессе
движения она взаимодействует с другими
звеньями и остается жёсткой, не меняет
свои размеры и форму.
Кинематическая пара – это соединение
двух соприкасающихся звеньев, которые
совершают определенные относительные
движения.
Структурная схема механизма – это
графический рисунок с условными
обозначениями звеньев и кинематических
пар без указания размеров звеньев.
7.
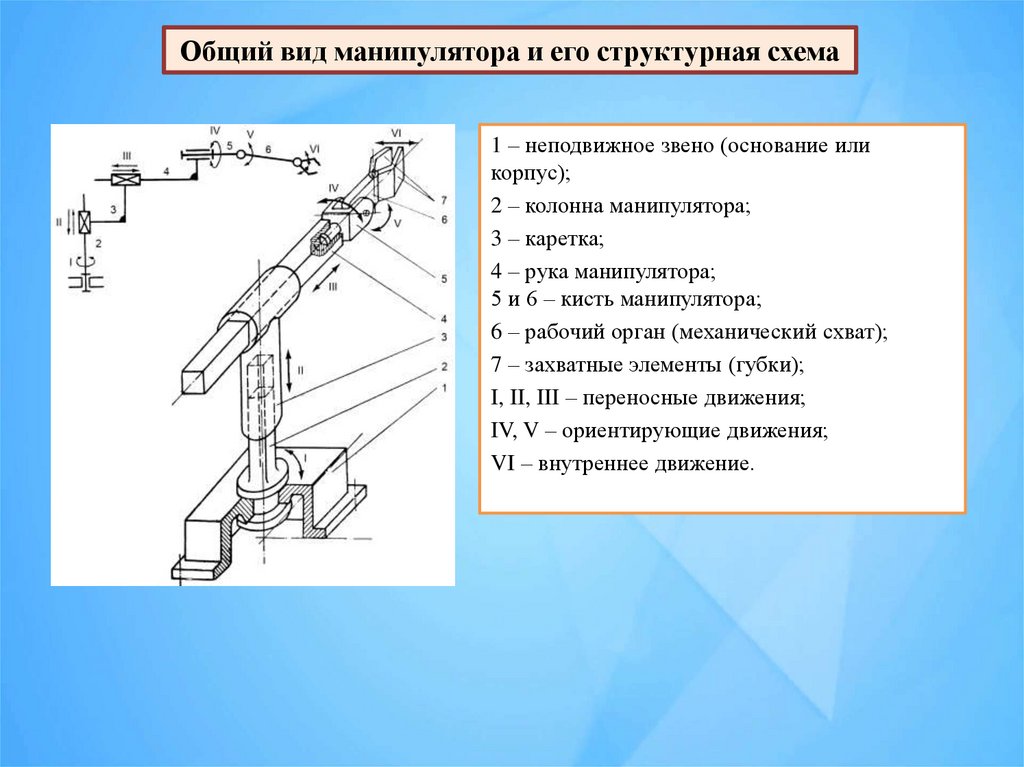
Общий вид манипулятора и его структурная схема1 – неподвижное звено (основание или
корпус);
2 – колонна манипулятора;
3 – каретка;
4 – рука манипулятора;
5 и 6 – кисть манипулятора;
6 – рабочий орган (механический схват);
7 – захватные элементы (губки);
I, II, III – переносные движения;
IV, V – ориентирующие движения;
VI – внутреннее движение.
8.
Устройство передвижения манипулятораИсполнительное устройство
Устройство
передвижения
Датчики
состояния
робота
Манипулятор
Рабочий
орган
Устройство управления
Пульт
обучения
Внешняя
среда
Датчики
соединения
среды
Пульт
управления
Устройство передвижения представляет собой перемещение манипулятора в необходимое
место на рабочем пространстве, оно состоит из ходовой части и приводного устройства.
9.
ПриводПривод служит преобразованием подводимой
энергии в механическую подвижность
исполняемых звеньев манипулятора в
соответствии с командным сигналом, который
поступает из системы управления
(энергоустановка двигателя и передаточный
механизм).
Система связи
Система связи необходима, чтобы обеспечить
обмен информацией между роботом и оператором
и технологическими устройствами для
осуществления заданий, контроля системы
самого робота и технического оборудования,
диагностики неисправностей и т. п.
10.
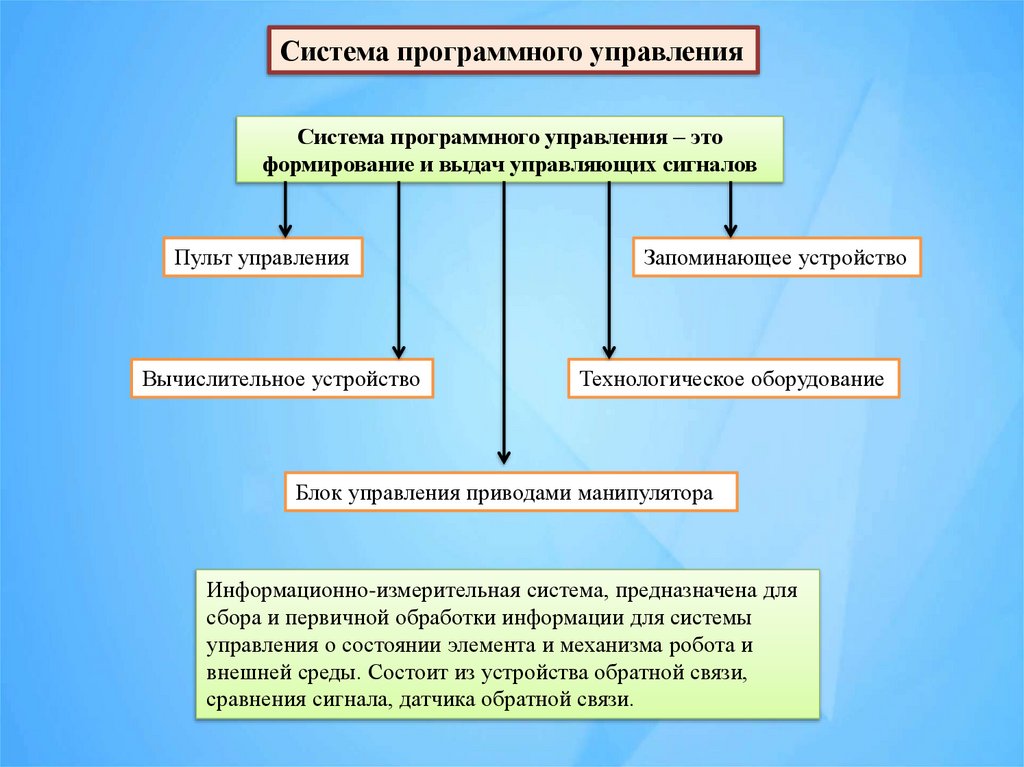
Система программного управленияСистема программного управления – это
формирование и выдач управляющих сигналов
Пульт управления
Вычислительное устройство
Запоминающее устройство
Технологическое оборудование
Блок управления приводами манипулятора
Информационно-измерительная система, предназначена для
сбора и первичной обработки информации для системы
управления о состоянии элемента и механизма робота и
внешней среды. Состоит из устройства обратной связи,
сравнения сигнала, датчика обратной связи.
11.
Классификация манипуляторных роботовКлассифицируют роботов по самым различным
признакам:
область применения,
производственно-технологические особенности,
специализация,
вид базовой системы координат,
грузоподъемность,
величина линейных перемещений,
объем рабочей зоны,
класс точности,
возможность передвижения (мобильность),
тип привода,
способ установки на рабочем месте,
тип системы управления,
способ программирования и др.
12.
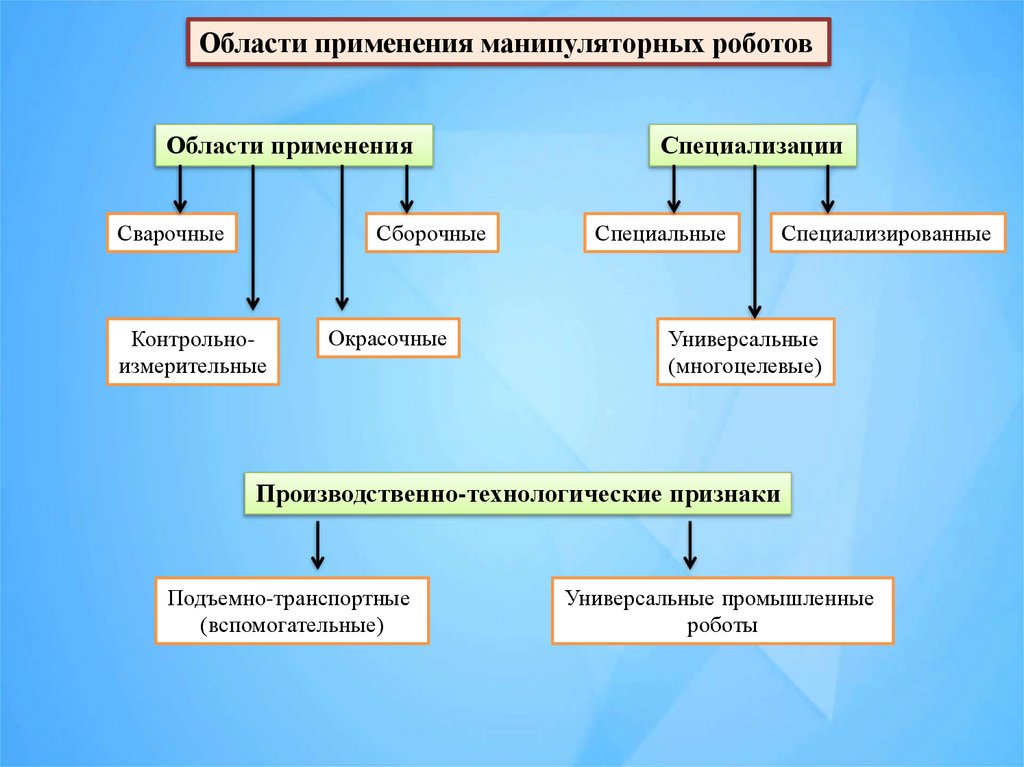
Области применения манипуляторных роботовОбласти применения
Сварочные
Сборочные
Контрольноизмерительные
Окрасочные
Специализации
Специальные
Специализированные
Универсальные
(многоцелевые)
Производственно-технологические признаки
Подъемно-транспортные
(вспомогательные)
Универсальные промышленные
роботы