 Физика
Физика География
ГеографияПохожие презентации:
")

")

")
")




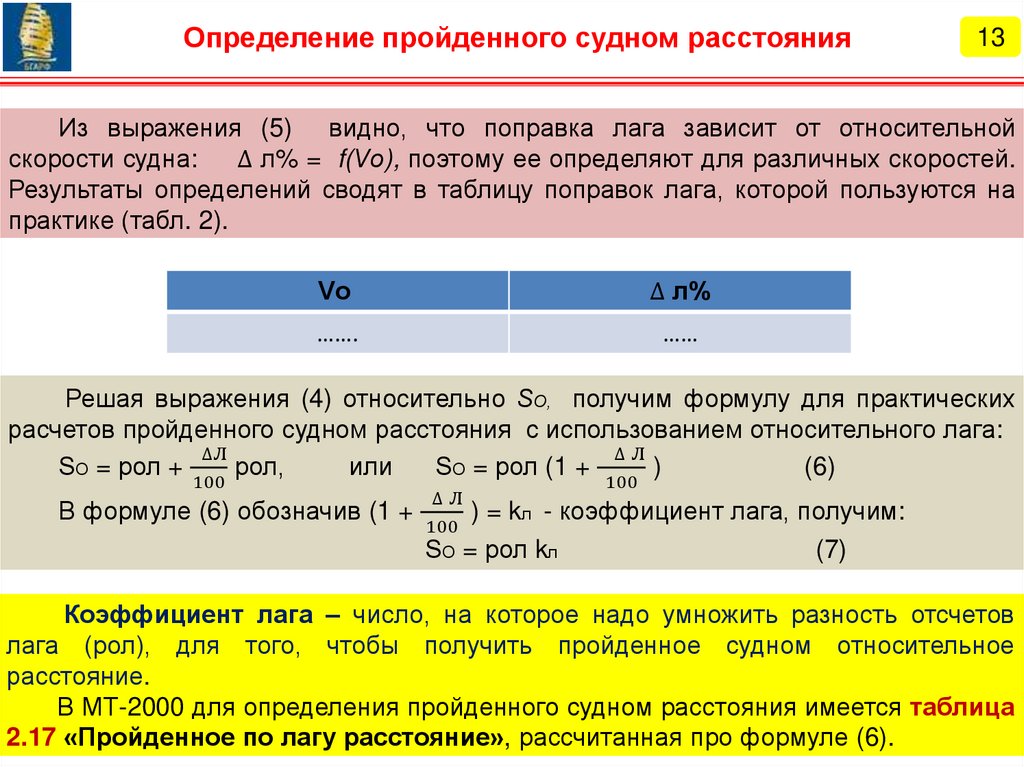
Определение пройденного судном расстояния по показаниям лага (лекция № 7)
1.
Федеральное государственное бюджетное образовательное учреждение высшего образованияКалининградский государственный технический университет
«Балтийская государственная академия рыбопромыслового флота»
(БГАРФ ФГБОУ ВО КГТУ)
Раздел 3. Определение пройденного расстояния.
Лекция № 7 (3.1)
Тема:
Федеральное государственное бюджетное образовательное учреждение высшего образования
Калининградский государственный технический университет
«Балтийская государственная академия рыбопромыслового флота»
(БГАРФ ФГБОУ ВО КГТУ)
1
Калининград
2021
Раздел 3. Определение пройденного расстояния.
Лекция № 7 (3.1)
Тема:
Доцент кафедры судовождения,
кандидат военных наук, доцент Щавелев В.П.
1
2.
Цель лекции. Учебные вопросыЦель лекции:
- формирование конвенционных компетентностей в части,
касающейся определения пройденного судном расстояния по
показаниям лага при ведении графического счисления с учетом
ветра, приливов, течений и рассчитанной скорости.
Учебные вопросы лекции:
1. Определение пройденного судном расстояния по
показаниям лага.
2. Определение пройденного судном расстояния по
относительному лагу.
3. Предвычисление показаний лага на момент прихода
судна в заданную точку.
2
3.
Литература3
Основная:
1. Дмитриев В.И, Рассукованый Л. С. Навигация и лоция, навигационная
гидрометеорология, электронная картография (+CD). Учебник. – Москва:
Моркнига, 2018 . – 312 с. - ISBN: 978-5-030033-52-5.
2. Дмитриев В.И., Григорян В.Л., Катенин В.А. Навигация и лоция. Учебник
для вузов (3-е издание переработанное и дополненное)/Под общ. Ред. д.ф.т.н.,
проф. В.И. Дектярева. – М.: «МОРКНИГА», 2009. – 458 с.: ил.
4.
Первый учебный вопрос1.
Определение
пройденного
расстояния по показаниям лага.
4
судном
5.
Принципы измерения скорости и пройденного судномрасстояния
5
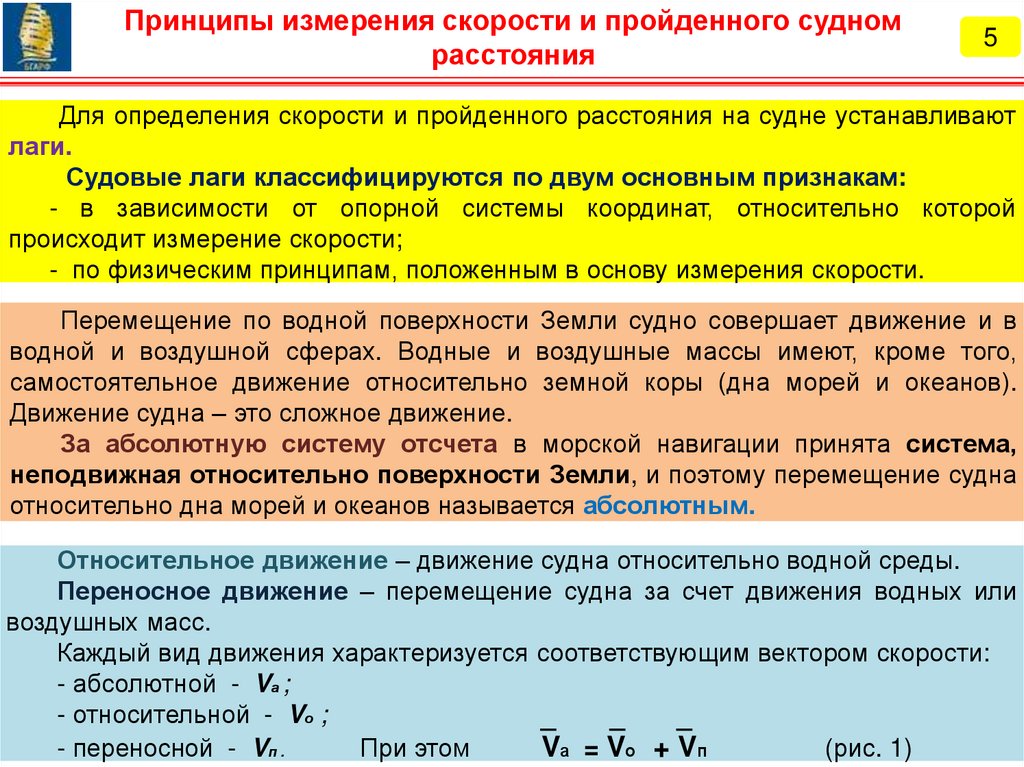
Для определения скорости и пройденного расстояния на судне устанавливают
лаги.
Судовые лаги классифицируются по двум основным признакам:
- в зависимости от опорной системы координат, относительно которой
происходит измерение скорости;
- по физическим принципам, положенным в основу измерения скорости.
Перемещение по водной поверхности Земли судно совершает движение и в
водной и воздушной сферах. Водные и воздушные массы имеют, кроме того,
самостоятельное движение относительно земной коры (дна морей и океанов).
Движение судна – это сложное движение.
За абсолютную систему отсчета в морской навигации принята система,
неподвижная относительно поверхности Земли, и поэтому перемещение судна
относительно дна морей и океанов называется абсолютным.
Относительное движение – движение судна относительно водной среды.
Переносное движение – перемещение судна за счет движения водных или
воздушных масс.
Каждый вид движения характеризуется соответствующим вектором скорости:
- абсолютной - Vа ;
- относительной - Vо ;
- переносной - Vп .
При этом
Vа = Vо + Vп
(рис. 1)
6.
Классификация лагов6
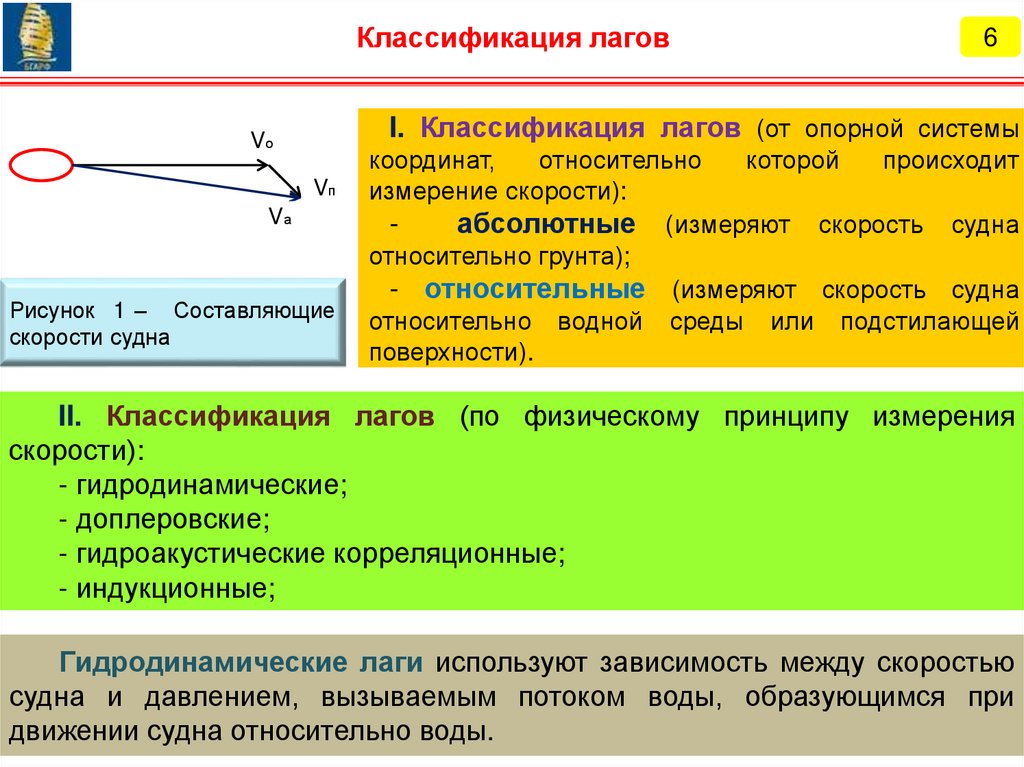
I. Классификация лагов (от опорной системы
Vо
Vп
Vа
Рисунок 1 – Составляющие
скорости судна
координат,
относительно
которой
происходит
измерение скорости):
абсолютные (измеряют скорость судна
относительно грунта);
- относительные (измеряют скорость судна
относительно водной среды или подстилающей
поверхности).
II. Классификация лагов (по физическому принципу измерения
скорости):
- гидродинамические;
- доплеровские;
- гидроакустические корреляционные;
- индукционные;
Гидродинамические лаги используют зависимость между скоростью
судна и давлением, вызываемым потоком воды, образующимся при
движении судна относительно воды.
7.
Лаги7
Доплеровские лаги основаны на измерении доплеровского сдвига
частоты сигнала, отраженного от поверхности воды или дна моря и
пропорционального скорости движения судна.
Разновидности доплеровского лага:
- гидроакустические доплеровские ;
- радиодоплеровские.
Гидроакустические доплеровские лаги измеряют скорость судна на
основе эффекта Доплера, возникающего при распространении
акустических волн в воде от излучателя, установленного в днище
движущегося судна, сторону дна и принятого приемником на судне.
Радиодоплеровские лаги имеют такой же принцип действия, как и
доплеровские
гидроакустические
лаги.
Радиодоплеровские
лаги
используются на судах с динамическим принципом поддержания – на
воздушной подушке и на подводных крыльях. Для них подстилающей
поверхностью является вода или лед, которые имеют собственное
движение по отношению к грунту, и поэтому указанные лаги являются
относительными.
8.
Лаги8
Гидроакустические корреляционные лаги - принцип действия их основан на
определении временного сдвига между акустическими сигналами, отраженными от
грунта и принятыми двумя судовыми антеннами, разнесенными в направлении
движения судна.
Индукционные лаги - принцип действия их основан на явлении
электромагнитной индукции. В таких лагах с помощью специального устройства за
бортом судна создается магнитное поле. При движении судна в морской воде как в
проводнике наводится электродвижущая сила Е (ЭДС). Величина ЭДС зависит от
скорости судна. Измеряя величину ЭДС, определяют относительную скорость скорость судна относительно воды VО:
Е = f(VО );
VО = F(Е);
Достоинства индукционных лагов:
- высокая точность работы на всем диапазоне скоростей , в том числе на
заднем ходу;
- возможность измерения скорости судна в боковом направлении (отдельные
модели).
Недостатки индукционных лагов:
- ненадежность работы в пресной воде;
- подверженность помехам при воздействии на измерительное устройство
внешних электромагнитных полей.
9.
Лаги9
Во всех лагах устанавливается интегрирующее устройство, которое по
измеренной относительной скорости VО и времени плавания t вырабатывает
пройденное судном расстояние относительно воды: