 Физика
ФизикаПохожие презентации:










Статика. Тема 8
1.
Лекция 8Сложение параллельных сил – Сложение двух параллельных сил подробно рассмотрено в демонстрационной программе автора по
теории пар “Теория пар” на сайте МИИТа. Посмотреть… ). Основной результат – две параллельные и направленные в одну сторону
силы приводятся к одной силе – равнодействующей, приложенной в точке, делящей прямую на расстояния, обратно пропорциональные
величинам сил.
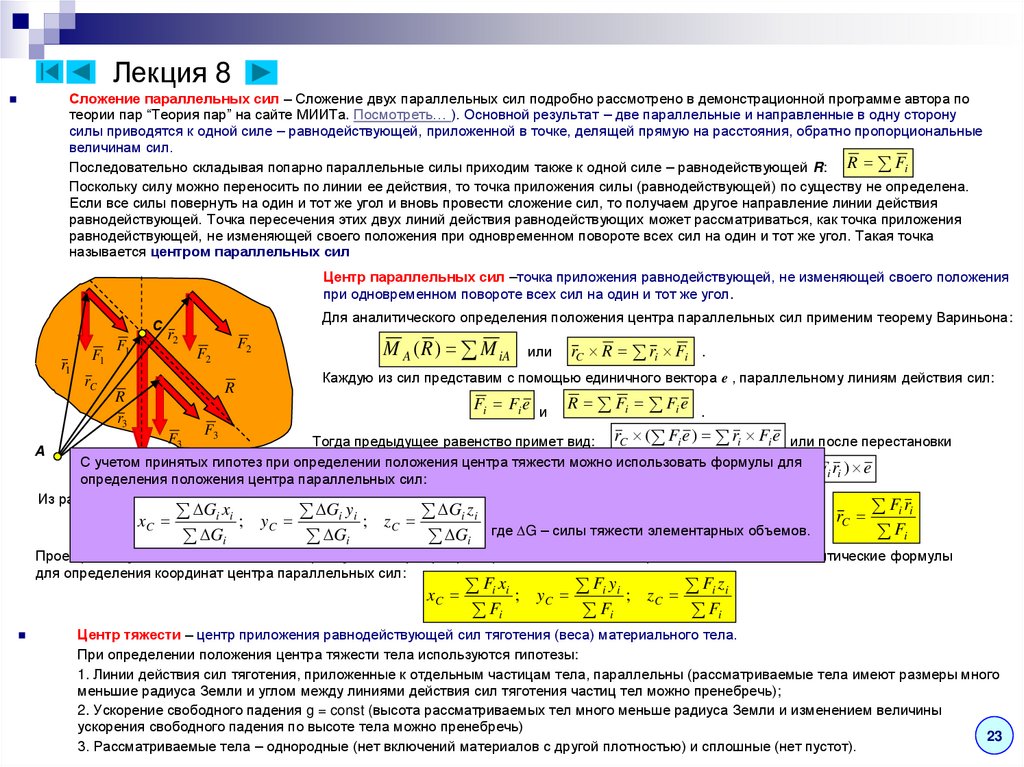
Последовательно складывая попарно параллельные силы приходим также к одной силе – равнодействующей R: R Fi
Поскольку силу можно переносить по линии ее действия, то точка приложения силы (равнодействующей) по существу не определена.
Если все силы повернуть на один и тот же угол и вновь провести сложение сил, то получаем другое направление линии действия
равнодействующей. Точка пересечения этих двух линий действия равнодействующих может рассматриваться, как точка приложения
равнодействующей, не изменяющей своего положения при одновременном повороте всех сил на один и тот же угол. Такая точка
называется центром параллельных сил
Центр параллельных сил –точка приложения равнодействующей, не изменяющей своего положения
при одновременном повороте всех сил на один и тот же угол.
С
r1
A
F1
rC
F1
Для аналитического определения положения центра параллельных сил применим теорему Вариньона:
r2
F2
F2
R
R
r3
F3
F3
M A ( R ) M iA
или
rC R ri Fi .
Каждую из сил представим с помощью единичного вектора e , параллельному линиям действия сил:
R Fi Fi e .
Тогда предыдущее равенство примет вид: rC ( Fi e ) ri Fi e или после перестановки
Fi Fi e и
скалярных положения
множителейцентра
в векторных
произведениях
С учетом принятых гипотез при определении
тяжести
можно использовать
(rCформулы
( Fi ri ) e
Fi ) e для
определения положения центра параллельных сил:
Из равенства векторных произведений и идентичности второго сомножителя следует: r
F F r , откуда
xC
Gi xi ; y Gi yi ; z Gi zi
C
C
Gi
Gi
Gi
C
i
ii
где G – силы тяжести элементарных объемов.
rC
Fi ri
Fi
Проекции полученного соотношения для радиуса-вектора центра параллельных сил на координатные оси дают аналитические формулы
для определения координат центра параллельных сил:
xC
Fi xi ; y Fi yi ; z Fi zi
C
C
Fi
Fi
Fi
Центр тяжести – центр приложения равнодействующей сил тяготения (веса) материального тела.
При определении положения центра тяжести тела используются гипотезы:
1. Линии действия сил тяготения, приложенные к отдельным частицам тела, параллельны (рассматриваемые тела имеют размеры много
меньшие радиуса Земли и углом между линиями действия сил тяготения частиц тел можно пренебречь);
2. Ускорение свободного падения g = const (высота рассматриваемых тел много меньше радиуса Земли и изменением величины
ускорения свободного падения по высоте тела можно пренебречь)
23
3. Рассматриваемые тела – однородные (нет включений материалов с другой плотностью) и сплошные (нет пустот).
2.
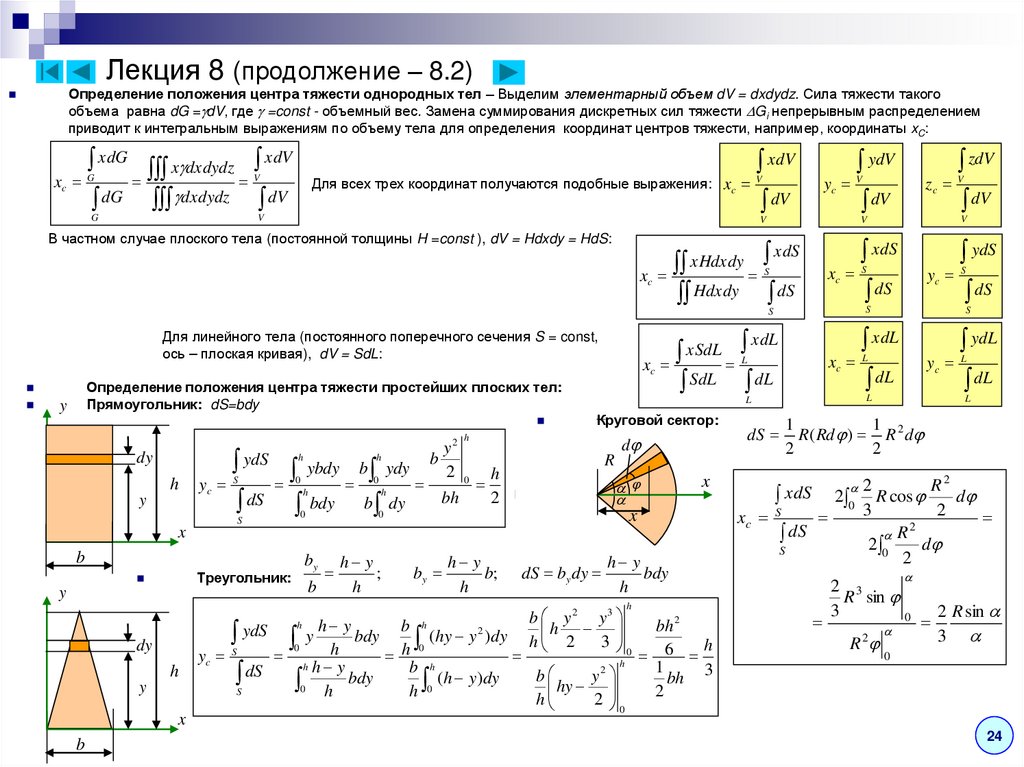
Лекция 8 (продолжение – 8.2)Определение положения центра тяжести однородных тел – Выделим элементарный объем dV = dxdydz. Сила тяжести такого
объема равна dG = dV, где =const - объемный вес. Замена суммирования дискретных сил тяжести Gi непрерывным распределением
приводит к интегральным выражениям по объему тела для определения координат центров тяжести, например, координаты xC:
xdG x dxdydz xdV
x
dG dxdydz dV
G
Для всех трех координат получаются подобные выражения: xc
V
c
G
xdV
V
В частном случае плоского тела (постоянной толщины H =const ), dV = Hdxdy = HdS:
xc
xHdxdy
Hdxdy
yc
V
dV
Определение положения центра тяжести простейших плоских тел:
Прямоугольник: dS=bdy
y
V
xdS
xdS
ydS
xc
S
dS
xc
dy
h
y
x
S
h
h
0
0
S
R
d
h
h
0
0
x
c
b
by
Треугольник:
y
ydS ybdy b ydy b 2 h
y
dS bdy b dy bh 2
b
y
0
h y
;
h
by
h y
b;
h
dS by dy
h y
bdy
h
h
b y 2 y3
h y
b h
bh 2
h
2
ydS
y
bdy
(
hy
y
)
dy
S
h 2
3 0
0
0
h
yc
h h
h h
6
h
S dS 0 h y bdy b 0 (h y)dy b hy y 2 1 bh 3
h
h
2
h
2 0
h
dy
h
y
x
b
x
dS
dS
dS
S
xdL
ydL
yc L
L
dL
dL
L
L
Круговой сектор:
yc S
S
S
S
L
2 h
dV
V
c
zc
dV
zdV
V
V
xdL
xSdL
x
SdL dL
Для линейного тела (постоянного поперечного сечения S = const,
ось – плоская кривая), dV = SdL:
ydV
V
L
1
1
R ( Rd ) R 2 d
2
2
R2
2 0 R cos
d
3
2
xc S
2
dS
R
2 0
d
S
2
2
xdS
2 3
R sin
3
0
R 2
2 R sin
3
0
24
3.
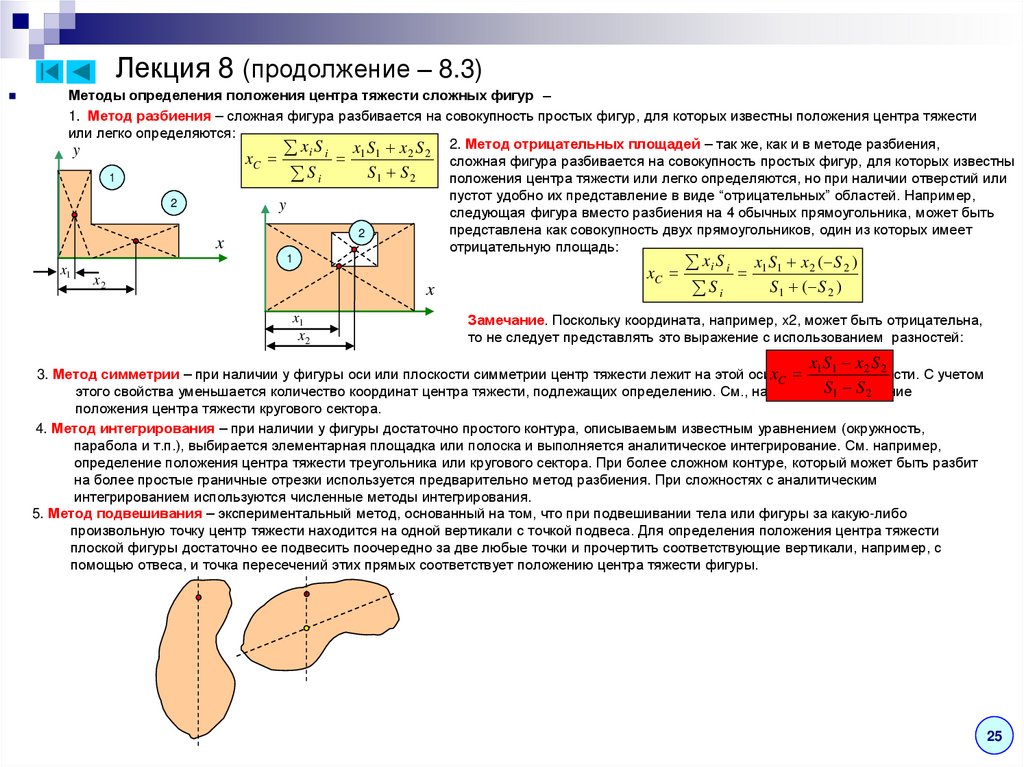
Лекция 8 (продолжение – 8.3)Методы определения положения центра тяжести сложных фигур –
1. Метод разбиения – сложная фигура разбивается на совокупность простых фигур, для которых известны положения центра тяжести
или легко определяются:
xi S i x1 S1 x 2 S 2 2. Метод отрицательных площадей – так же, как и в методе разбиения,
y
xC
сложная фигура разбивается на совокупность простых фигур, для которых известны
S1 S 2
Si
1
положения центра тяжести или легко определяются, но при наличии отверстий или
пустот удобно их представление в виде “отрицательных” областей. Например,
2
y
следующая фигура вместо разбиения на 4 обычных прямоугольника, может быть
представлена как совокупность двух прямоугольников, один из которых имеет
2
x
отрицательную площадь:
x1
1
x2
x
x1
x2
xC
xi S i x1 S1 x 2 ( S 2 )
S1 ( S 2 )
Si
Замечание. Поскольку координата, например, x2, может быть отрицательна,
то не следует представлять это выражение с использованием разностей:
x S x S
1 1
2 2
3. Метод симметрии – при наличии у фигуры оси или плоскости симметрии центр тяжести лежит на этой осиxили
C в этой плоскости. С учетом
этого свойства уменьшается количество координат центра тяжести, подлежащих определению. См., например, S
определение
1 S2
положения центра тяжести кругового сектора.
4. Метод интегрирования – при наличии у фигуры достаточно простого контура, описываемым известным уравнением (окружность,
парабола и т.п.), выбирается элементарная площадка или полоска и выполняется аналитическое интегрирование. См. например,
определение положения центра тяжести треугольника или кругового сектора. При более сложном контуре, который может быть разбит
на более простые граничные отрезки используется предварительно метод разбиения. При сложностях с аналитическим
интегрированием используются численные методы интегрирования.
5. Метод подвешивания – экспериментальный метод, основанный на том, что при подвешивании тела или фигуры за какую-либо
произвольную точку центр тяжести находится на одной вертикали с точкой подвеса. Для определения положения центра тяжести
плоской фигуры достаточно ее подвесить поочередно за две любые точки и прочертить соответствующие вертикали, например, с
помощью отвеса, и точка пересечений этих прямых соответствует положению центра тяжести фигуры.
25