














 Физика
ФизикаПохожие презентации:




")
")




Кинематика точки. Лекция №2.1
1.
Лекция № 2.1Учебная дисциплина: Теоретическая механика
Раздел: Кинематика
Тема:
Кинематика точки.
Учебные вопросы:
1.
Основные понятия кинематики.
2.
Способы задания движения точки.
3.
Частные случаи движения точки.
2.
Кинематикой называется раздел механики, в которомизучается движения точки или тела без учета причин,
вызывающих или изменяющих его, т.е. без учета действующих
на них сил.
Разделы кинематики
КИНЕМАТИКА
КИНЕМАТИКА ТОЧКИ
КИНЕМАТИКА ТВЕРДОГО
ТЕЛА
▼
3.
Основные задачи кинематики точкиописание способов задания движения точки;
определение кинематических характеристик движения точки
(скорости, ускорения).
Скорость точки – это величина, которая характеризует как быстро и в каком
направлении меняется положение точки в пространстве.
Ускорение точки – это мера движения, которая характеризует как быстро и в
каком направлении меняется скорость точки в пространстве.
Для решения задач кинематики необходимо, чтобы изучаемое движение было
каким-либо образом задано (описано).
Задать движение или закон движения тела (точки) относительно какойнибудь системы отсчета − значит задать условия, позволяющие определить
положение этого тела относительно данной системы отсчета в любой
момент времени.
4.
СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИ ТОЧКИ1. Векторный способ задания движения
2. Координатный способ задания движения
3. Естественный способ задания движения
5.
Векторный способ задания движения точки состоит в том, чтозадается закон изменения радиус−вектора движущейся точки
М как функции времени:
М
z
О
y
x
Это равенство называется векторным уравнением движения
точки или законом движения точки в векторной форме.
6.
Определение скорости точкиПусть
– радиус−вектор, определяющий положение точки
М в момент времени t;
М
z
М1
О
y
x
– радиус−вектор, определяющий положение
точки М в момент времени
t1 = t + Δt
▼
7.
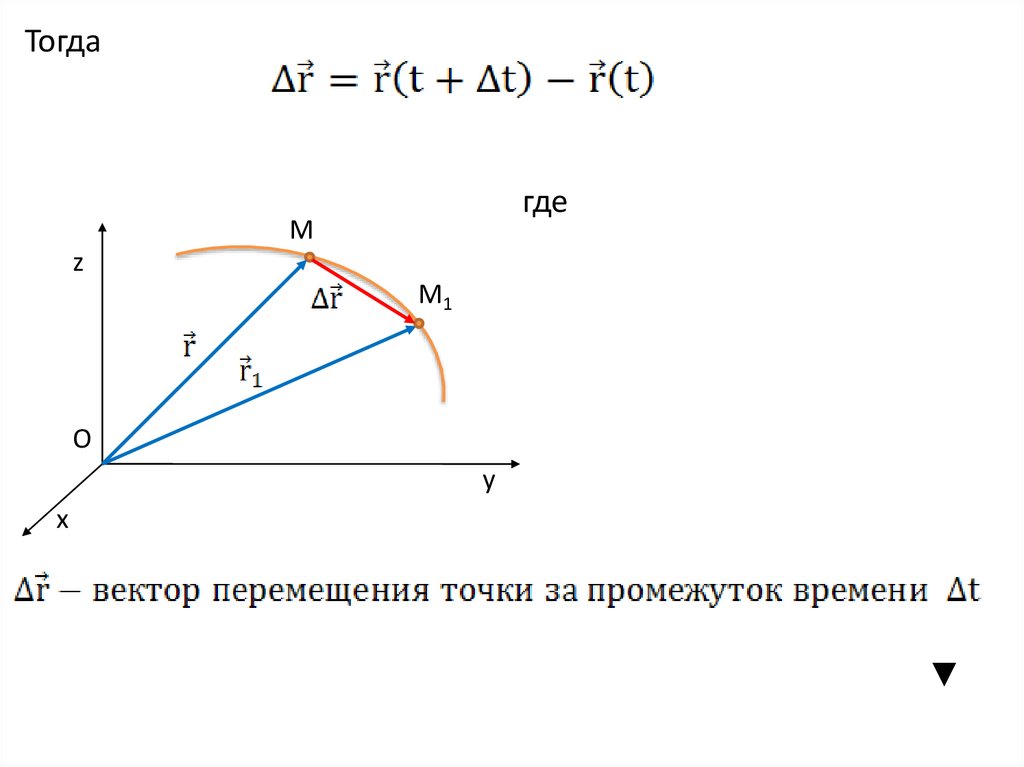
Тогдагде
М
z
М1
О
y
x
▼
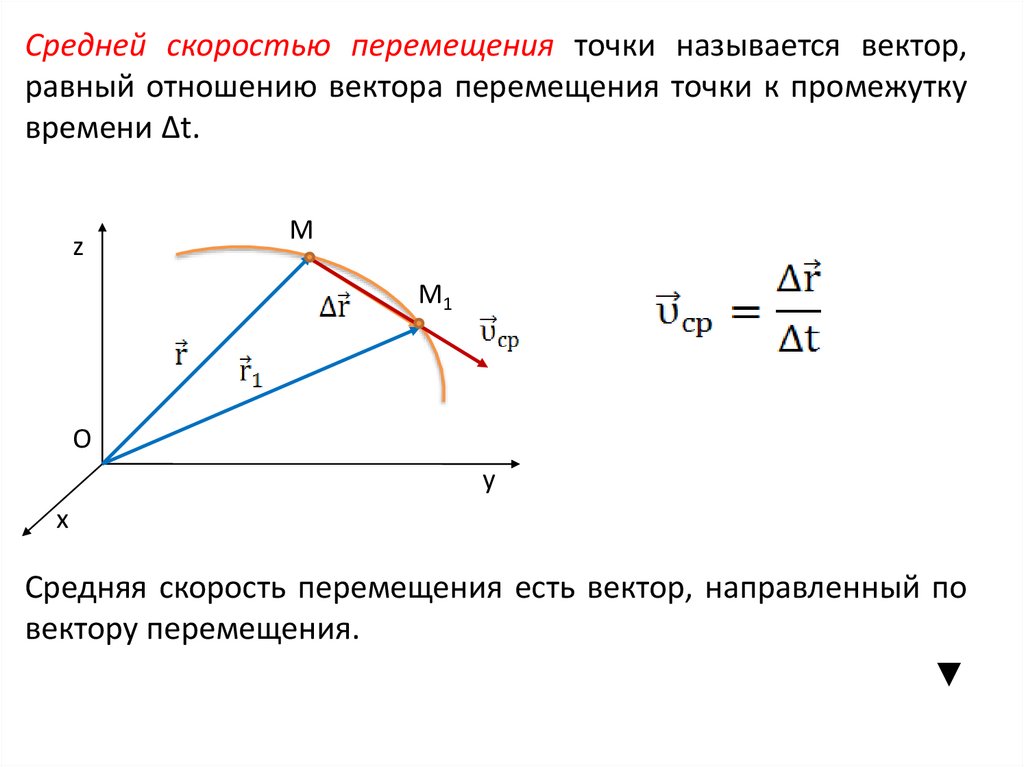
8.
Средней скоростью перемещения точки называется вектор,равный отношению вектора перемещения точки к промежутку
времени Δt.
z
М
М1
О
y
x
Средняя скорость перемещения есть вектор, направленный по
вектору перемещения.
▼
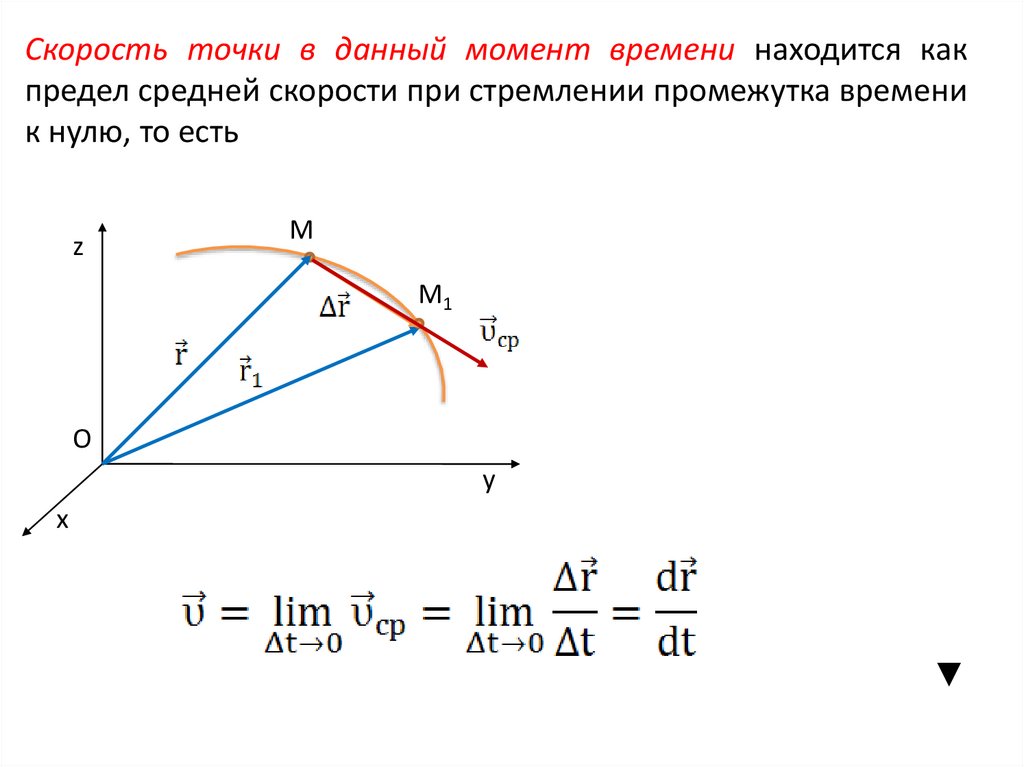
9.
Скорость точки в данный момент времени находится какпредел средней скорости при стремлении промежутка времени
к нулю, то есть
z
М
М1
О
y
x
▼
10.
Следовательно,Скорость точки в данный момент времени равна векторной
производной от радиуса−вектора точки по времени.
z
М
М1
О
y
x
Вектор скорости направлен по касательной к траектории точки
в сторону движения.
▼
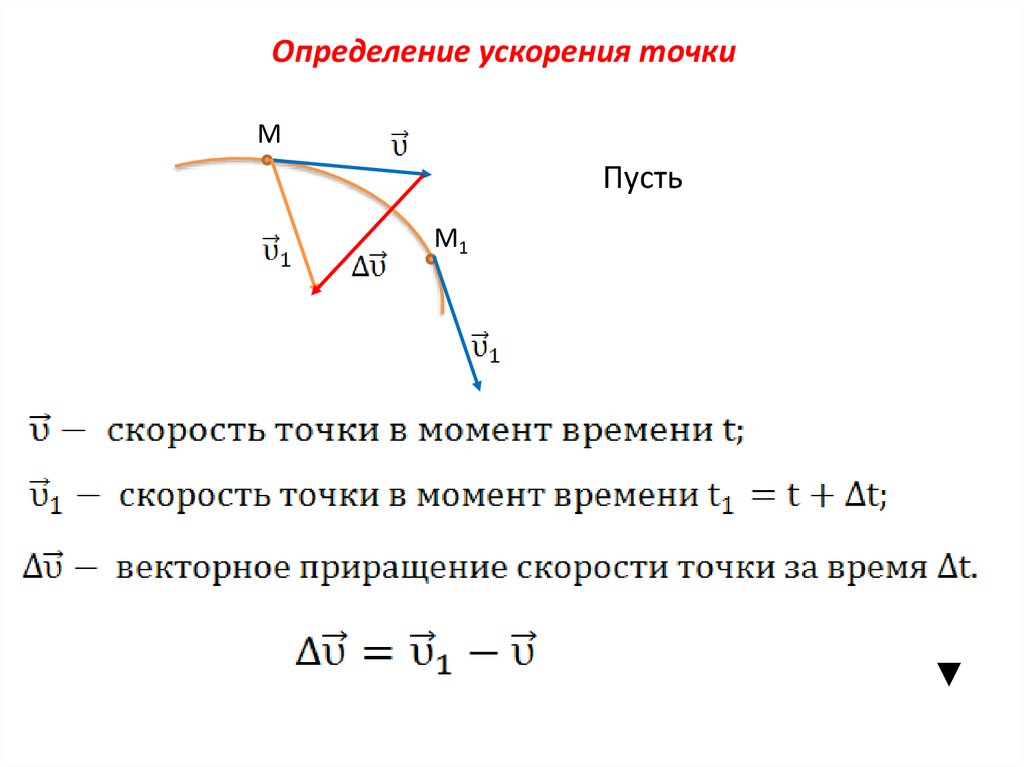
11.
Определение ускорения точкиМ
Пусть
М1
▼
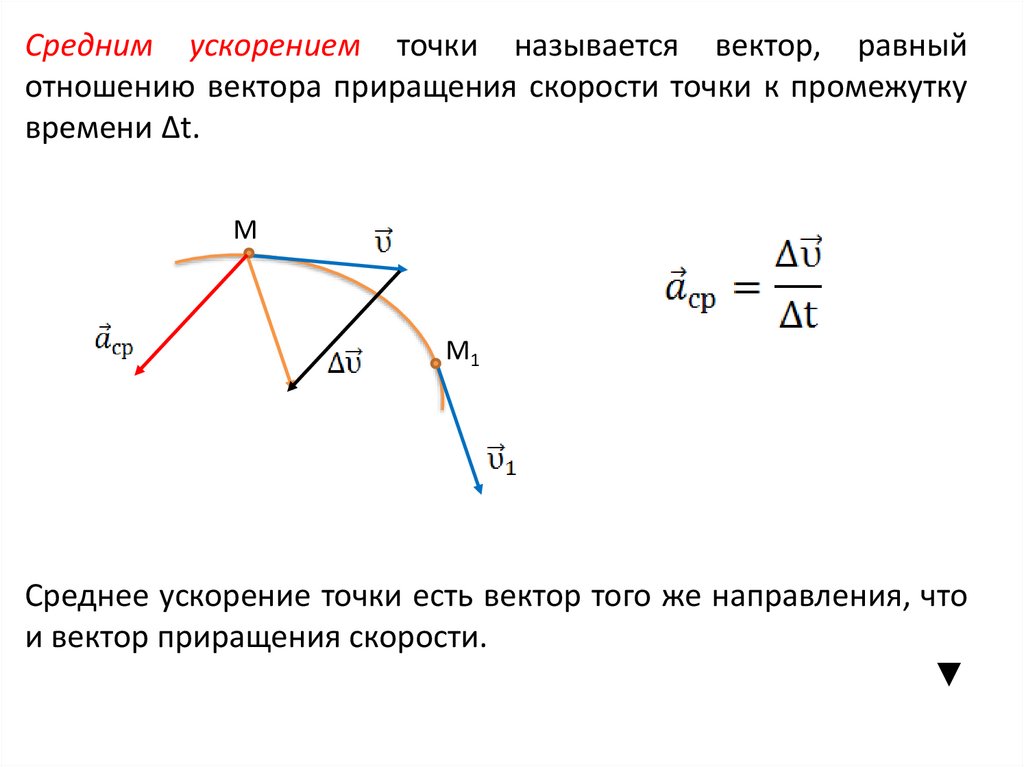
12.
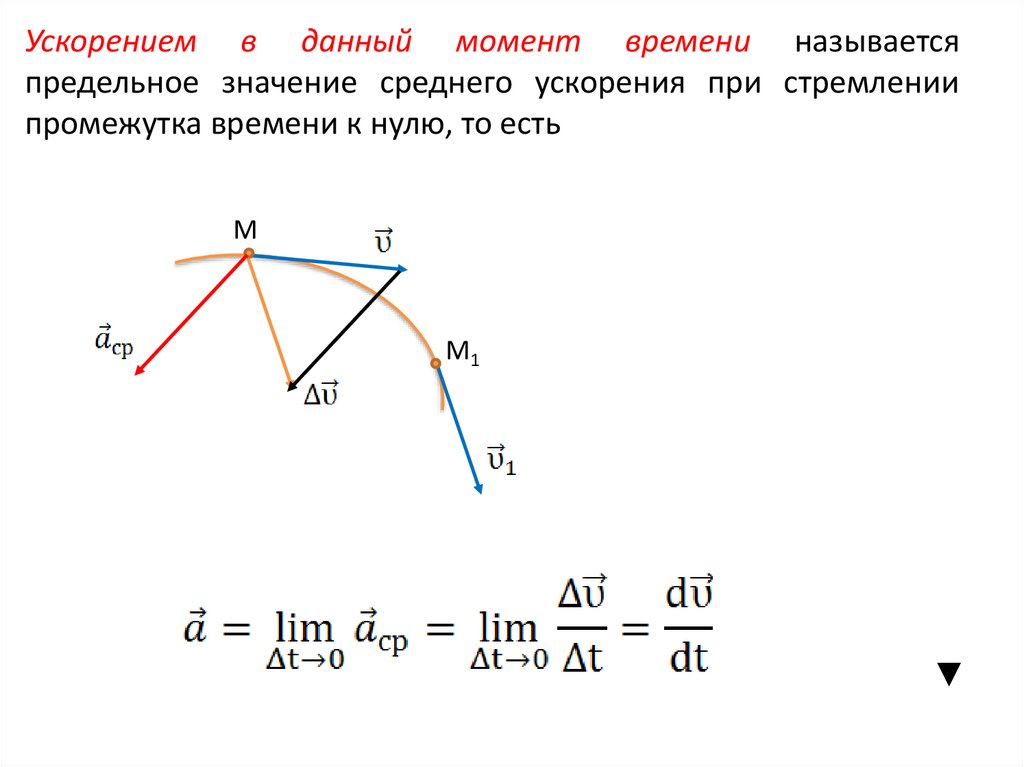
Средним ускорением точки называется вектор, равныйотношению вектора приращения скорости точки к промежутку
времени Δt.
М
М1
Среднее ускорение точки есть вектор того же направления, что
и вектор приращения скорости.
▼
13.
Ускорением в данный момент времени называетсяпредельное значение среднего ускорения при стремлении
промежутка времени к нулю, то есть
М
М1
▼
14.
Таким образом:Ускорение точки есть вектор, равный первой производной
вектора скорости по времени или второй производной от
радиуса−вектора точки по времени.
Вектор ускорения
траектории.
направлен
в
сторону
вогнутости
▼
15.
Координатный способ задания движения точки состоит в том,что в некоторой системе отсчета Оxyz задаются координаты
движущейся точки М как функции времени:
z
x = x(t)
М
y = y(t)
z(t)
x(t)
x
О
z = z(t)
y(t)
y
▼
16.
Эти уравнения, заданием которых полностью определяетсядвижение точки, называются уравнениями движения точки в
координатной форме.
Уравнения являются параметрическими, в которых роль
параметра играет время t.
По ним легко определить уравнение траектории точки в
декартовых координатах.
Чтобы записать уравнение траектории в явном форме, надо
исключить из них время.
▼
17.
Как известно из математики, радиус−вектор выражаетсяформулой:
(1)
где
x (t), y (t), z (t) − проекции радиус−вектора на
декартовой системы координат;
оси
Формула (1) выражает связь между координатным и
векторным способами задания движения.
▼
18.
Определение скорости точкиПо определению
Так как
Следовательно,
▼
19.
Продифференцировав выражение, получаем:С другой стороны
Следовательно,
Проекции скорости точки на оси неподвижных декартовых
координат равны первым производным от соответствующих
координат точки по времени.
▼
20.
Определение ускорения точкиИз определения ускорения:
Так как
Следовательно,
▼
21.
Продифференцировав выражение, получаем:С другой стороны
Следовательно,
Проекции ускорения точки на оси неподвижных декартовых
координат
равны
вторым
производным
от
соответствующих координат точки по времени.
▼
22.
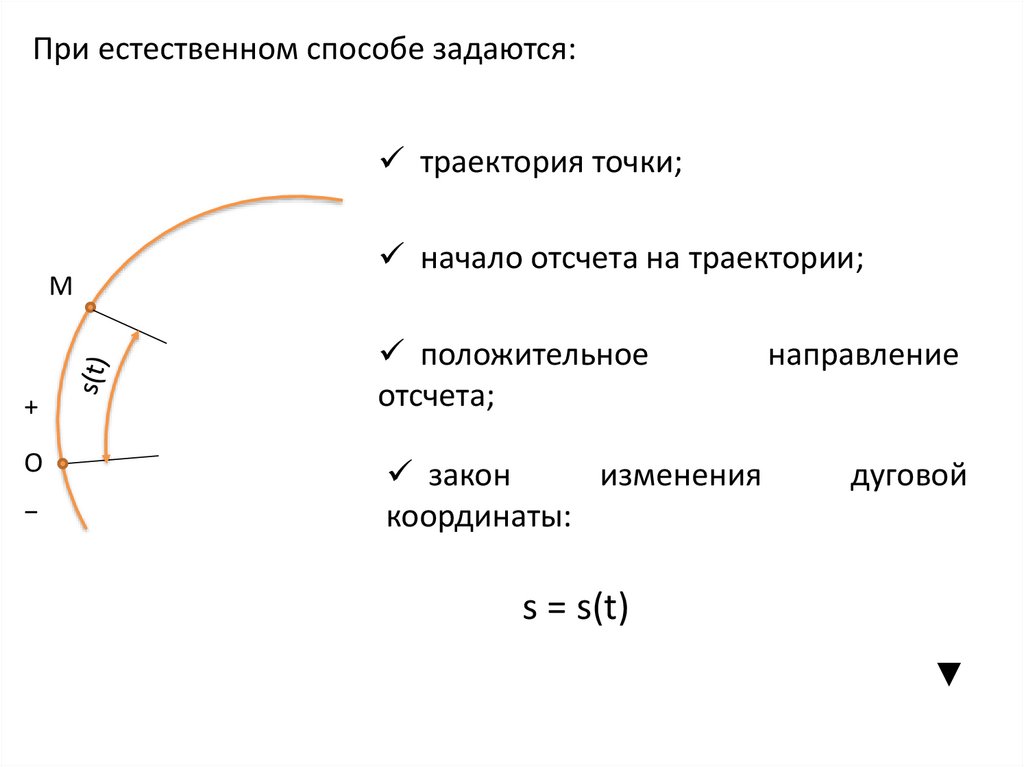
При естественном способе задаются:траектория точки;
М
+
О
−
начало отсчета на траектории;
положительное
отсчета;
закон
изменения
координаты:
направление
дуговой
s = s(t)
▼
23.
Определение скорости точкиМ
М1
s1
О
−
+
s
Δs
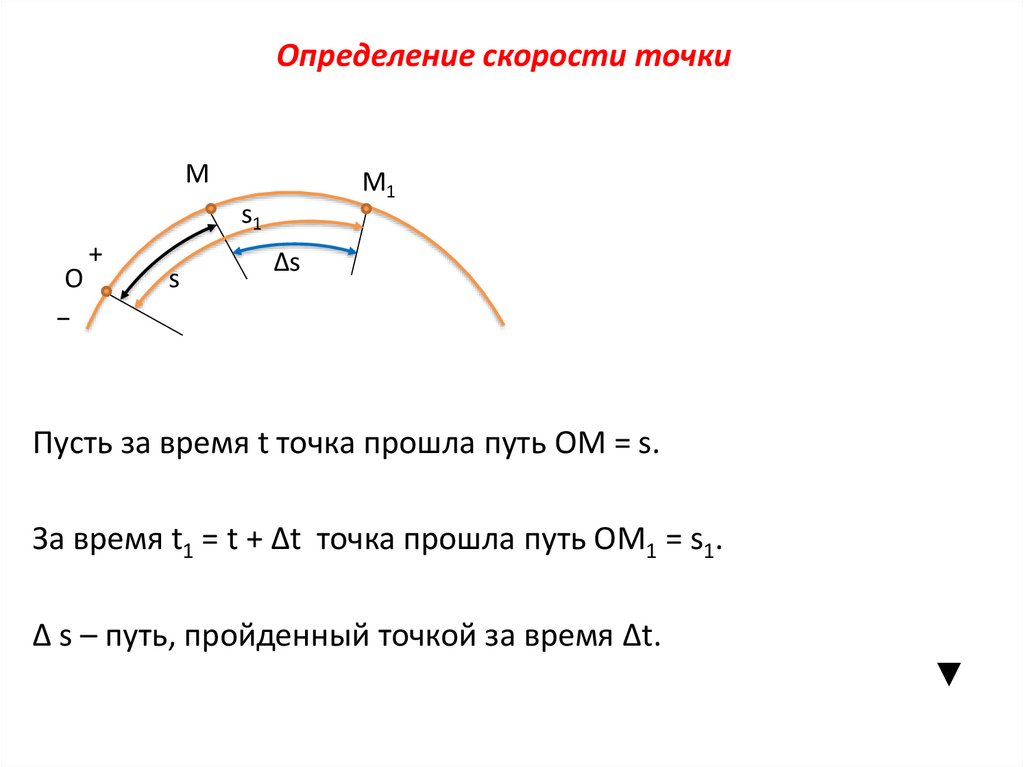
Пусть за время t точка прошла путь ОМ = s.
За время t1 = t + Δt точка прошла путь ОМ1 = s1.
Δ s – путь, пройденный точкой за время Δt.
▼
24.
Отношение пройденного пути Δs к промежутку времени Δtназывается средней скоростью точки за время Δt.
Скорость точки в данный момент времени находится как
предел средней скорости при стремлении промежутка времени
к нулю, то есть
▼
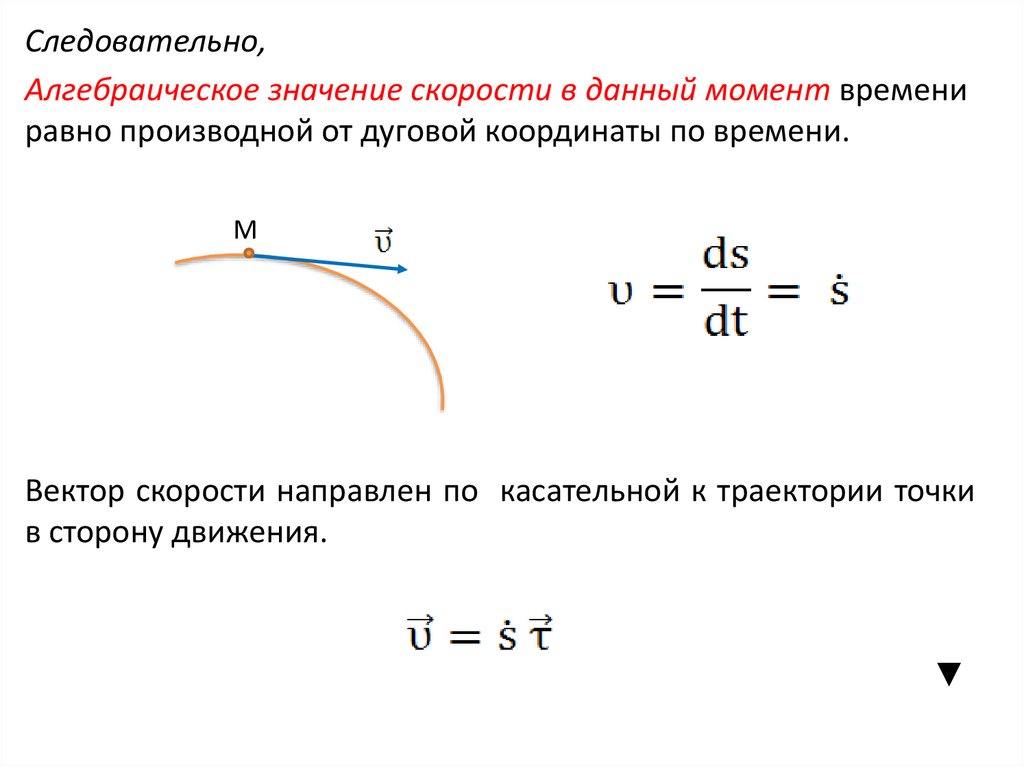
25.
Следовательно,Алгебраическое значение скорости в данный момент времени
равно производной от дуговой координаты по времени.
М
Вектор скорости направлен по касательной к траектории точки
в сторону движения.
▼
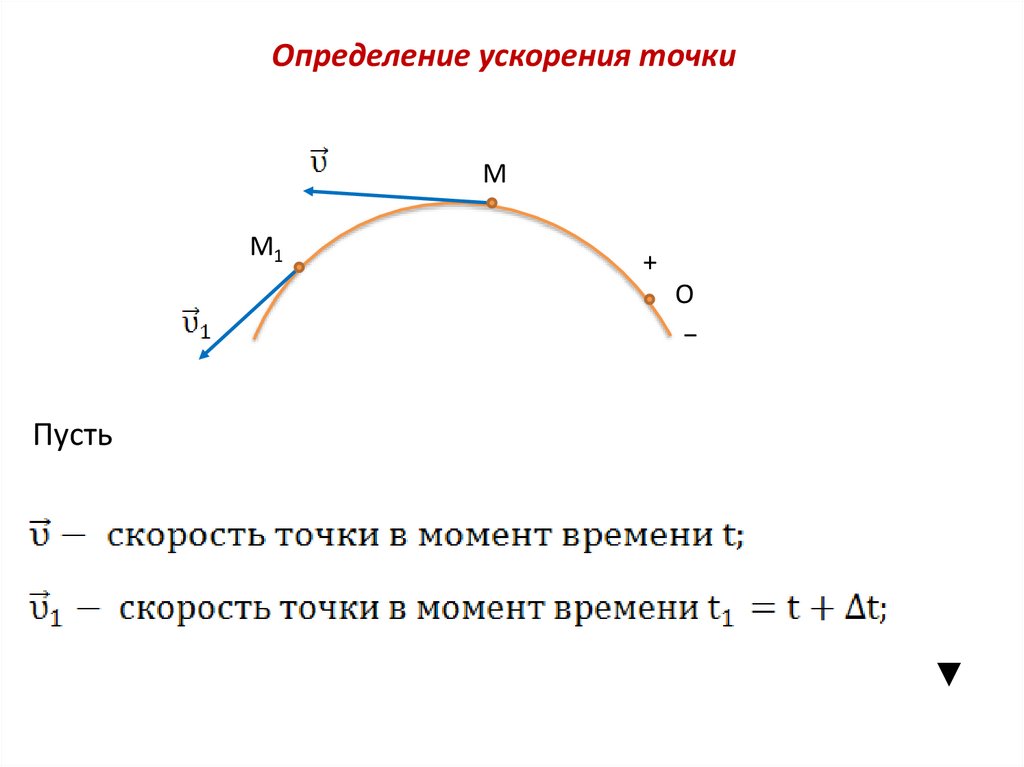
26.
Определение ускорения точкиМ
М1
+
О
−
Пусть
▼
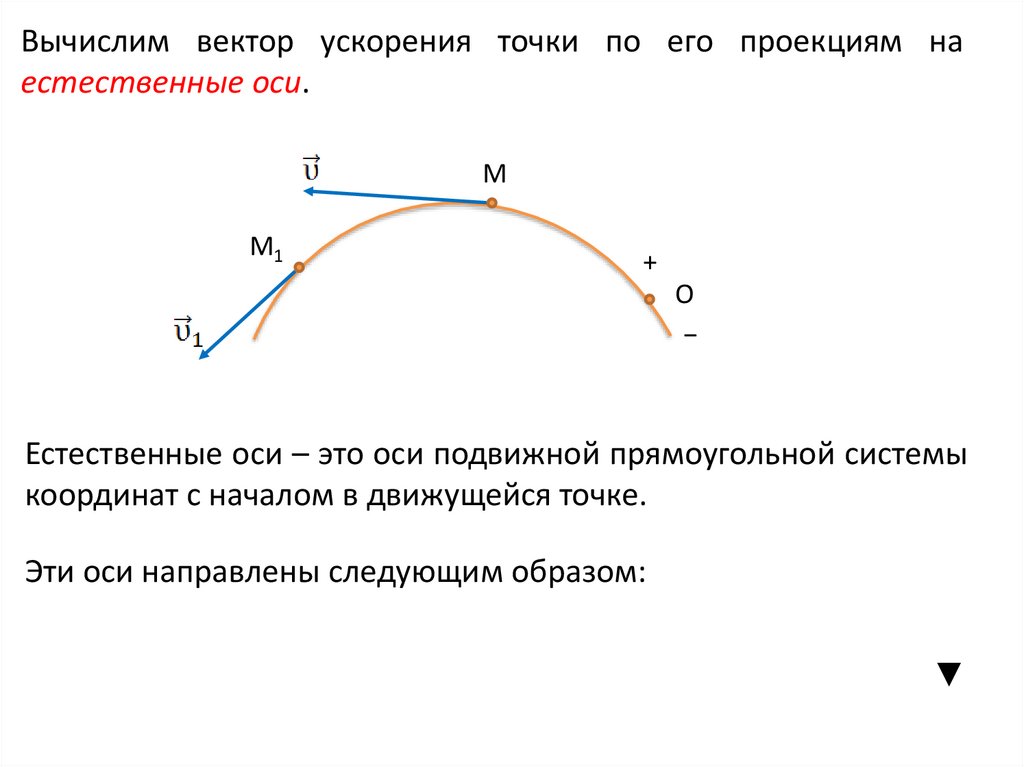
27.
Вычислим вектор ускорения точки по его проекциям наестественные оси.
М
М1
+
О
−
Естественные оси – это оси подвижной прямоугольной системы
координат с началом в движущейся точке.
Эти оси направлены следующим образом:
▼
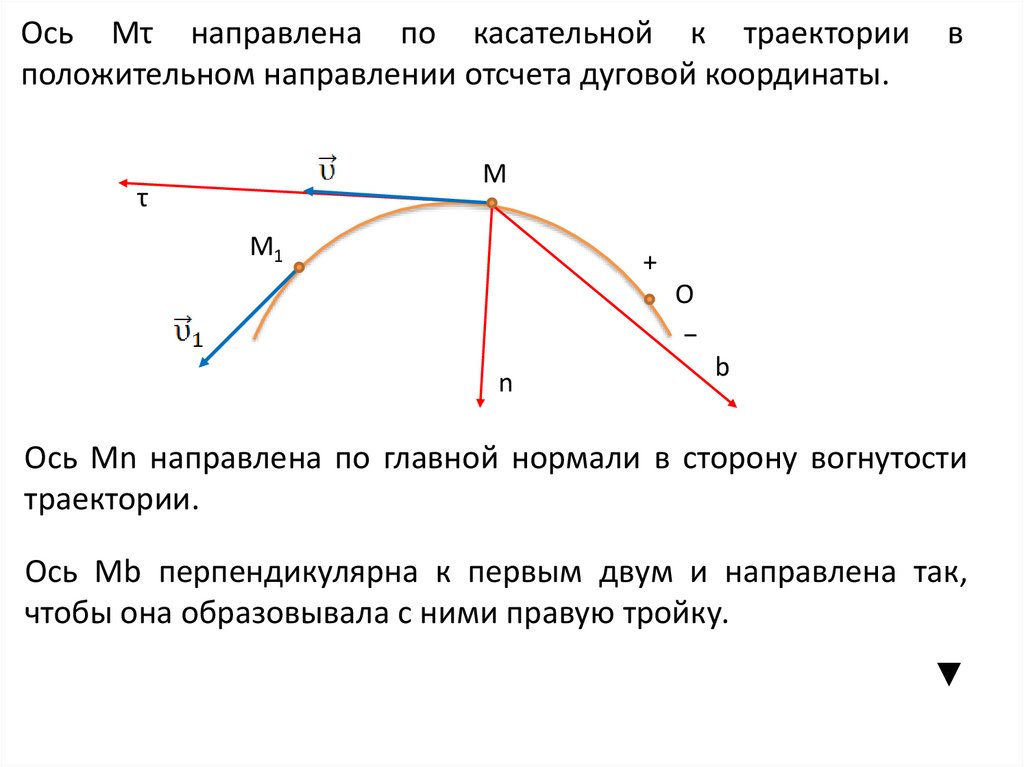
28.
Ось Мτ направлена по касательной к траекторииположительном направлении отсчета дуговой координаты.
в
М
τ
М1
+
О
−
n
b
Ось Мn направлена по главной нормали в сторону вогнутости
траектории.
Ось Мb перпендикулярна к первым двум и направлена так,
чтобы она образовывала с ними правую тройку.
▼
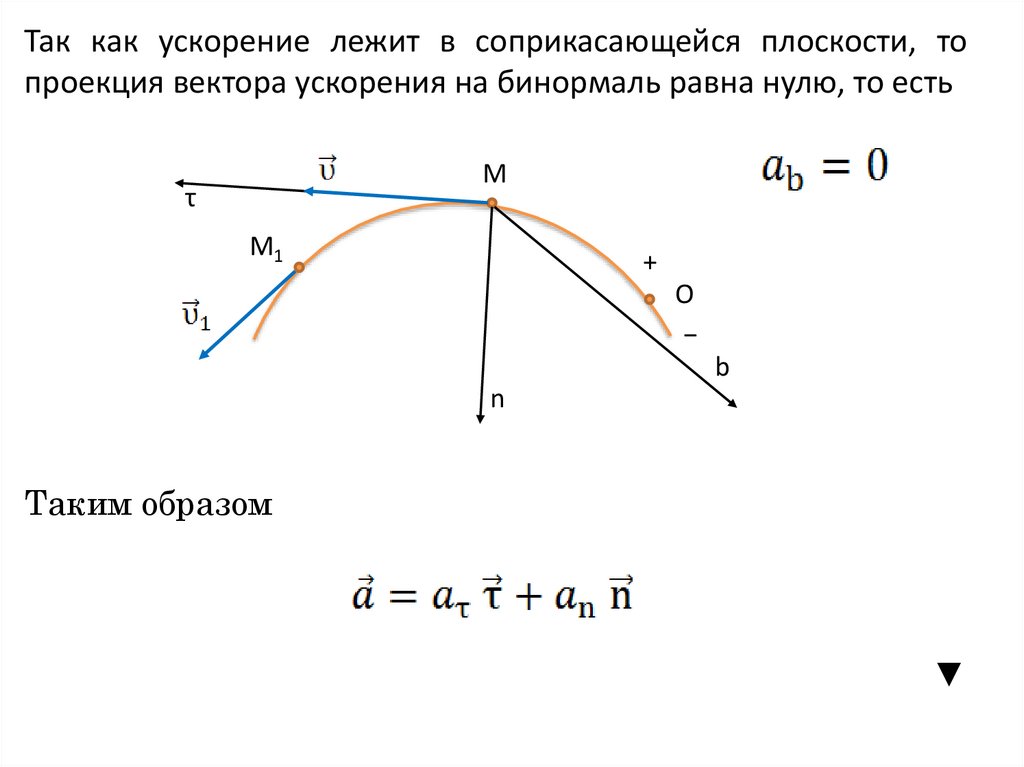
29.
Так как ускорение лежит в соприкасающейся плоскости, топроекция вектора ускорения на бинормаль равна нулю, то есть
М
τ
М1
+
О
−
b
n
Таким образом
▼
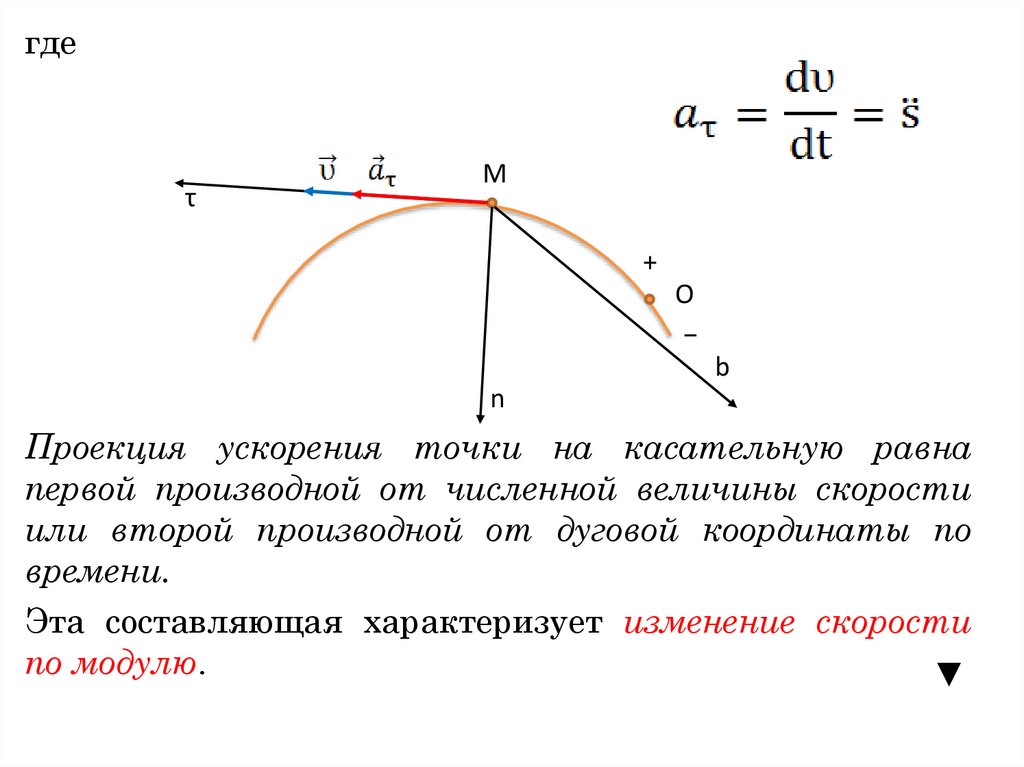
30.
гдеτ
М
+
О
−
b
n
Проекция ускорения точки на касательную равна
первой производной от численной величины скорости
или второй производной от дуговой координаты по
времени.
Эта составляющая характеризует изменение скорости
по модулю.
▼
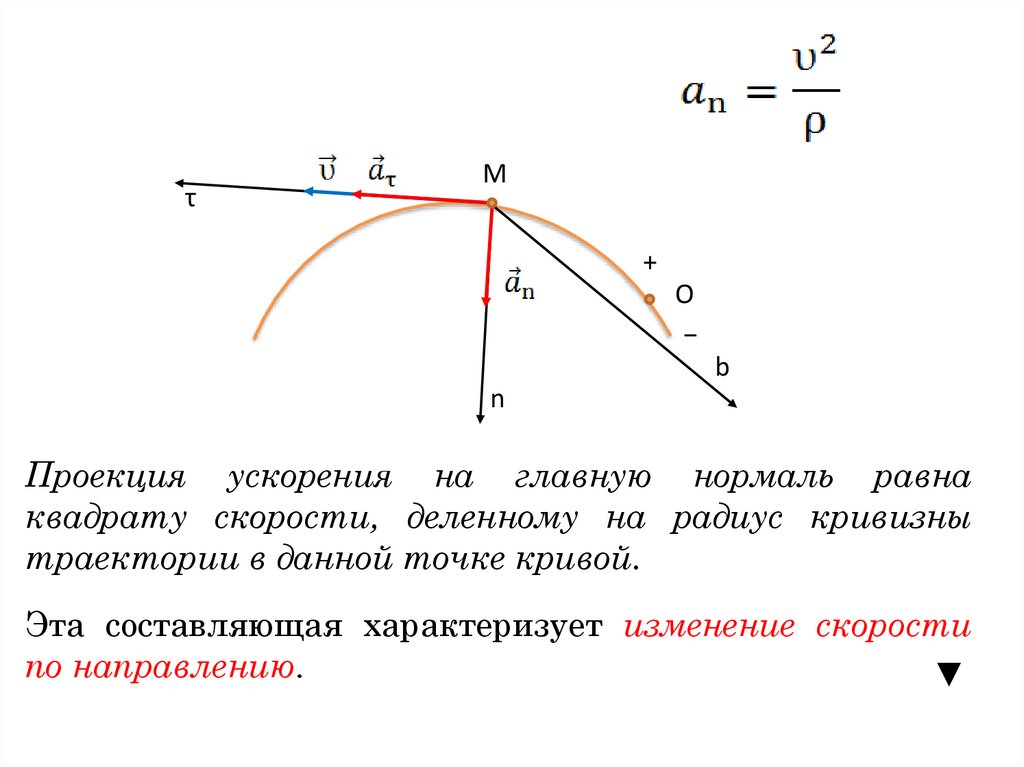
31.
τМ
+
О
−
b
n
Проекция ускорения на главную нормаль равна
квадрату скорости, деленному на радиус кривизны
траектории в данной точке кривой.
Эта составляющая характеризует изменение скорости
по направлению.
▼
32.
Векторускорения
точки
изображается
диагональю
параллелограмма, построенного на касательной и нормальной
составляющих.
τ
М
+
О
−
b
n
Так как эти составляющие взаимно перпендикулярны, то по
модулю
▼
33.
Равномерное движение точкиДвижение точки называется равномерным, если модуль ее
скорости не изменяется во время движения, то есть
Уравнение равномерного движения точки имеет вид:
▼
34.
Равнопеременное движение точкиРавнопеременным движением точки называется такое
движение, при котором касательное ускорение является
величиной постоянной, то есть
Уравнение равнопеременного движения точки имеет вид:
▼
35.
Еслито равнопеременное
равноускоренным.
движение
называется
то равнопеременное
равнозамедленным.
движение
называется
▼
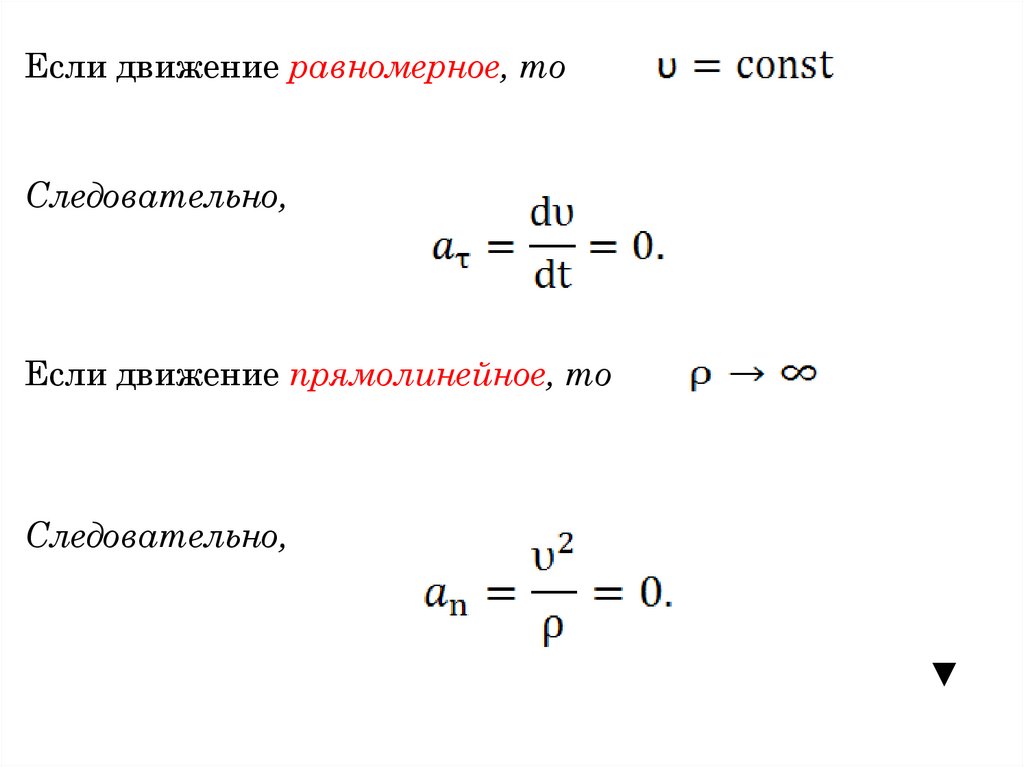
36.
Если движение равномерное, тоСледовательно,
Если движение прямолинейное, то
Следовательно,
▼
37.
1. Движение равномерное и прямолинейное.Следовательно,
М
▼
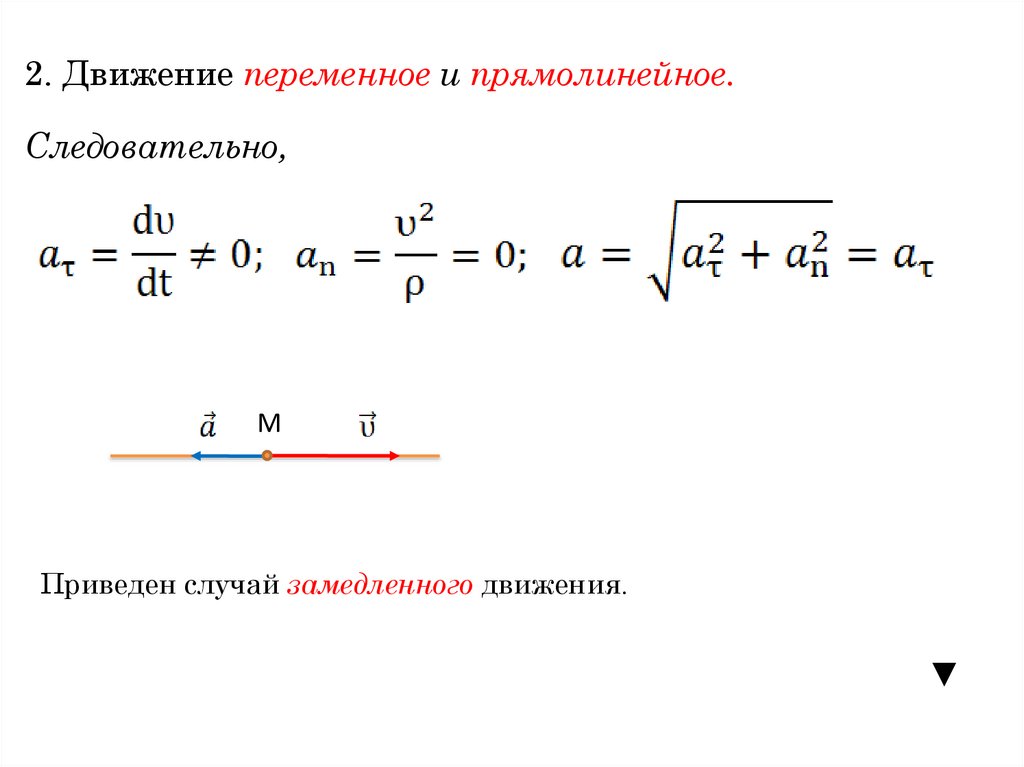
38.
2. Движение переменное и прямолинейное.Следовательно,
М
Приведен случай замедленного движения.
▼
39.
3. Движение равномерное и криволинейное.Следовательно,
М
▼
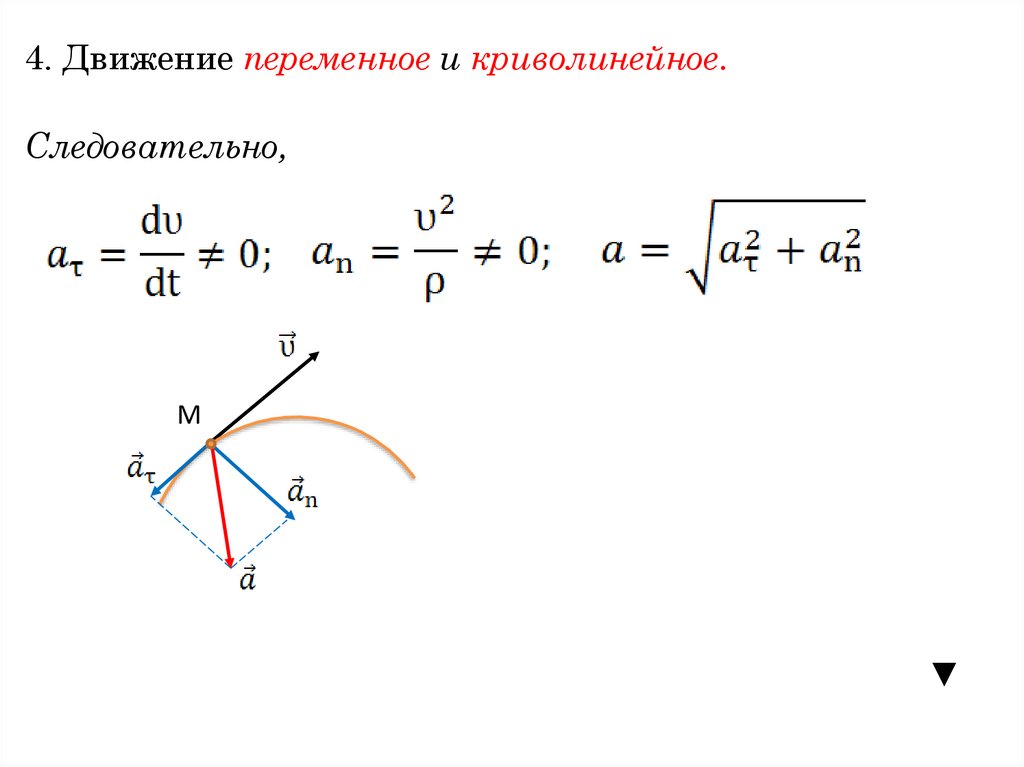
40.
4. Движение переменное и криволинейное.Следовательно,
М
▼
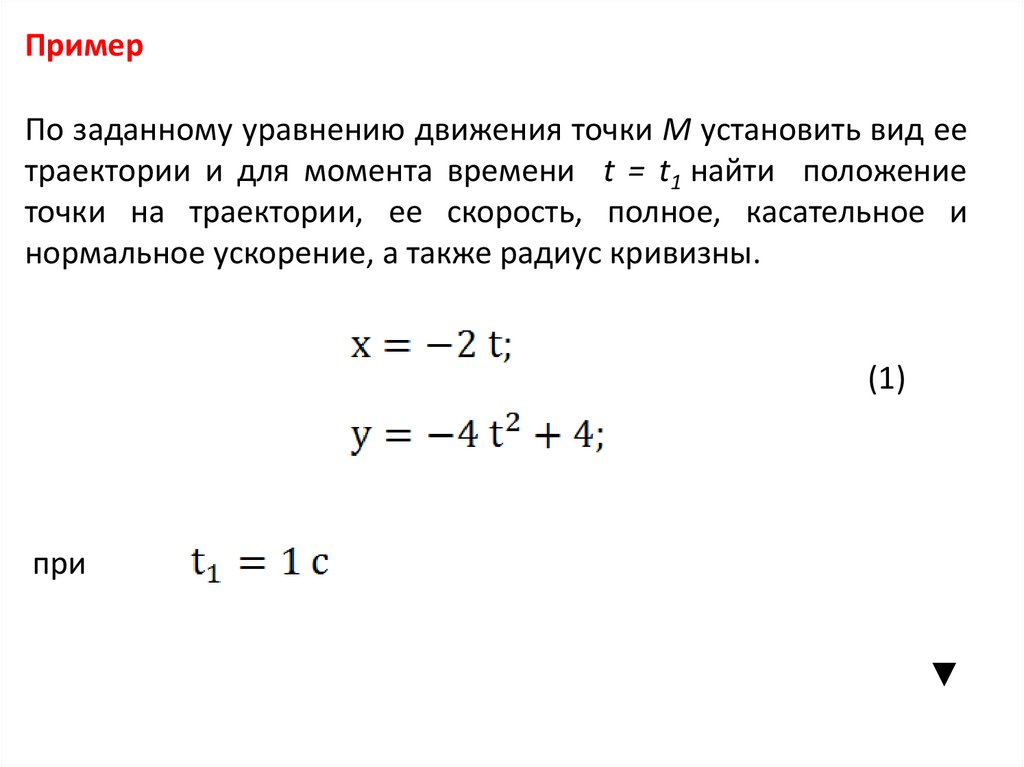
41.
ПримерПо заданному уравнению движения точки М установить вид ее
траектории и для момента времени t = t1 найти положение
точки на траектории, ее скорость, полное, касательное и
нормальное ускорение, а также радиус кривизны.
(1)
при
▼
42.
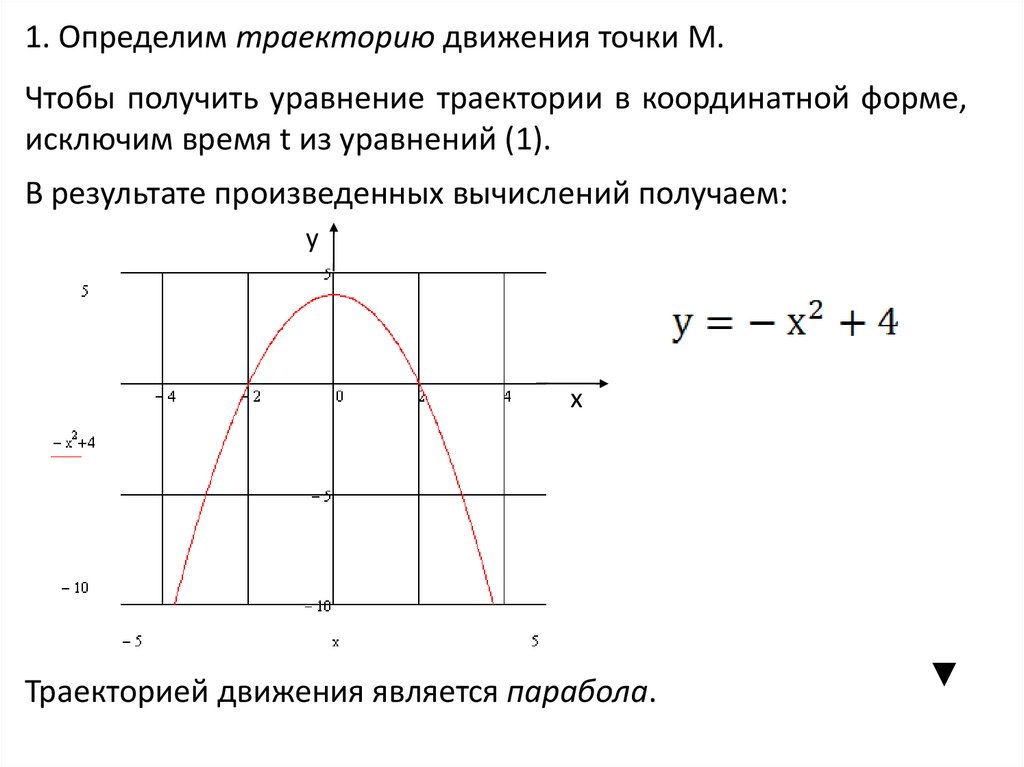
1. Определим траекторию движения точки М.Чтобы получить уравнение траектории в координатной форме,
исключим время t из уравнений (1).
В результате произведенных вычислений получаем:
y
x
Траекторией движения является парабола.
▼
43.
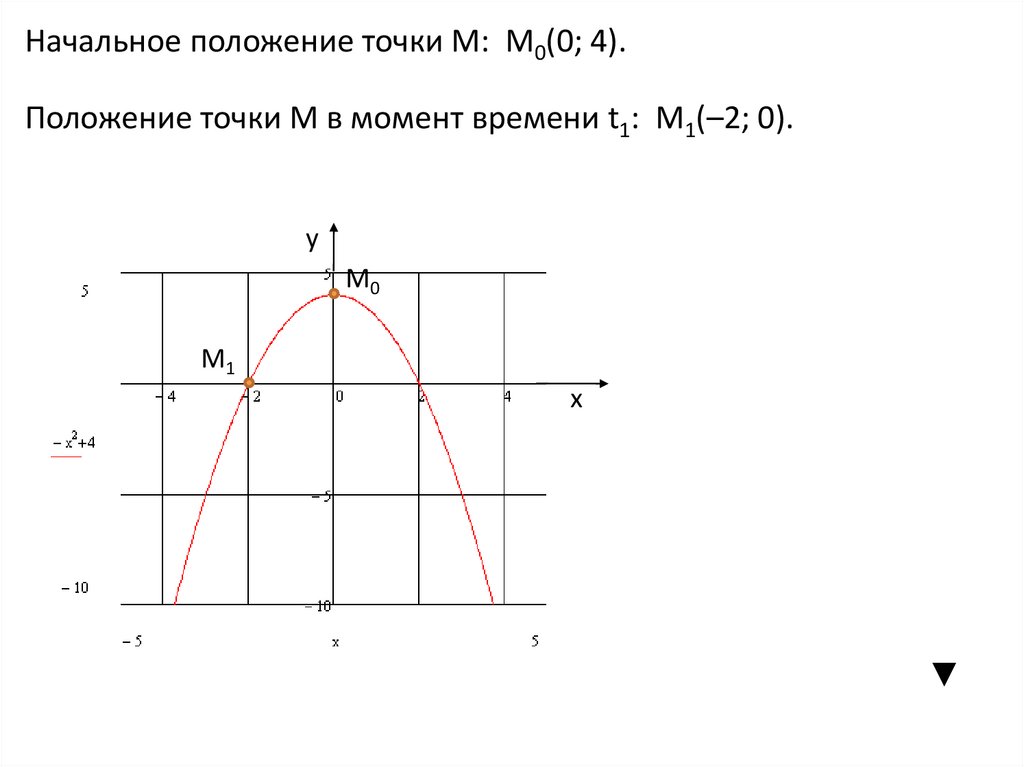
Начальное положение точки М: М0(0; 4).Положение точки М в момент времени t1: М1(–2; 0).
y
М0
М1
x
▼
44.
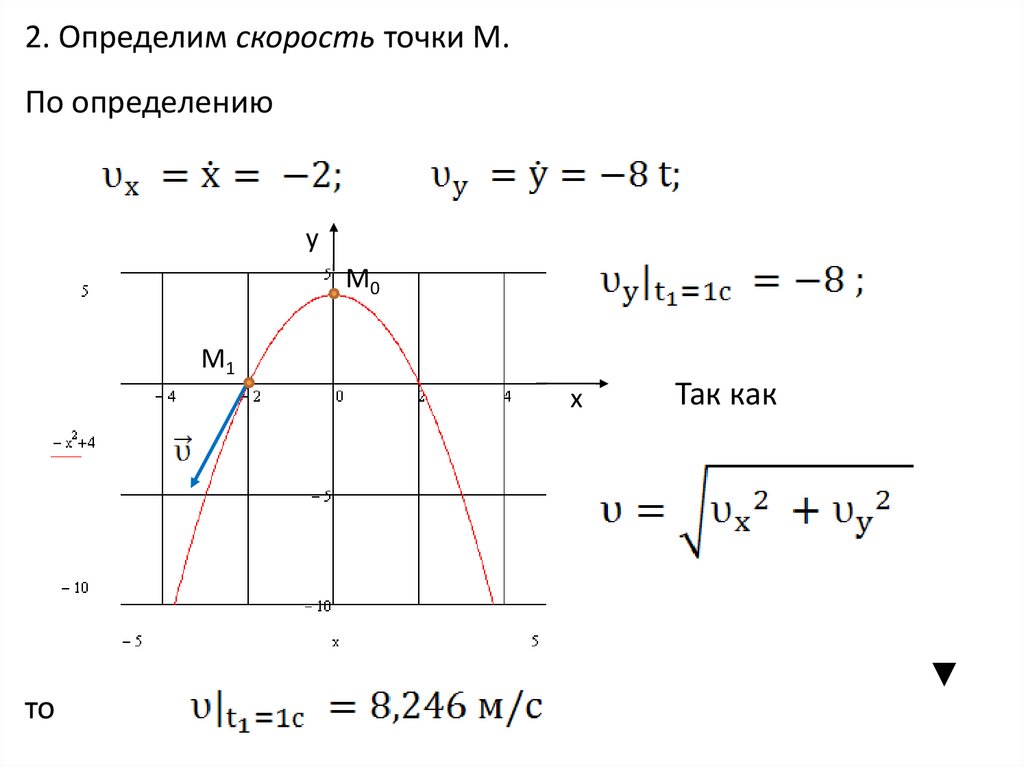
2. Определим скорость точки М.По определению
y
М0
М1
x
то
Так как
▼
45.
3. Определим ускорение точки М.По определению
y
М0
Так как
М1
x
то
▼
46.
4. Определим радиус кривизны траектории в точке М.По определению
Так как
где
или
Окончательно получаем:
▼