

 Интернет
ИнтернетПохожие презентации:










Control area
1.
CONTROL AREANETWORK
ЖЕЛІСІНІҢ
ӨНДІРІСКЕ
О Р Н АТ У
ЖОЛДАРЫН
Қ А РА С Т Ы Р У
2.
Жүйелік-техникалық жобалаусатысында can-шинасы бар
бағдарламалық-аппараттық
терминалды әзірлеу қажет болатын
жалпы қағидаттар әзірленетін
болады. Жобалау кезінде құрылғы
орындайтын негізгі функцияларды
анықтау, пайдаланылған
интерфейстерді сипаттау қажет.
3.
Жергілікті желі контроллерін (CAN) 1980 жылынеміс автомобиль фирмасы Роберт Бош
автомобиль қосымшалары үшін жасаған. Жаңа
интерфейсті дамытудың мақсаты
өткізгіштердің жалпы санын азайта отырып,
автомобильдің әртүрлі түйіндерінен дәйекті
интерфейс арқылы ақпарат берудің сенімділігін
арттыру болды. Can интерфейсі
автоматтандыру жүйелерінде, автомобиль
техникасында, медициналық жабдықта және
т.б. кеңінен қолданылды.
4.
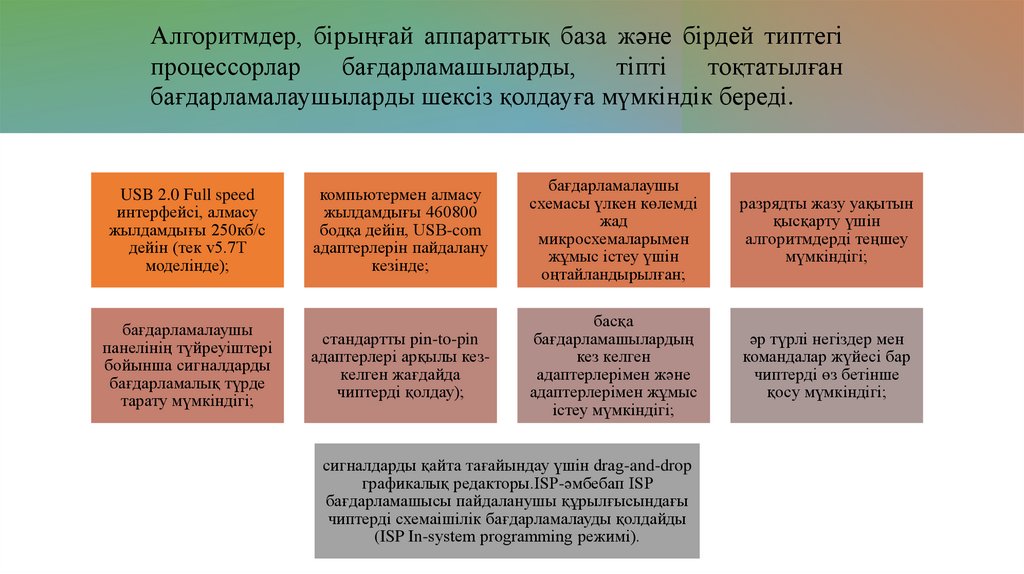
Алгоритмдер, бірыңғай аппараттық база және бірдей типтегіпроцессорлар
бағдарламашыларды,
тіпті
тоқтатылған
бағдарламалаушыларды шексіз қолдауға мүмкіндік береді.
USB 2.0 Full speed
интерфейсі, алмасу
жылдамдығы 250кб/с
дейін (тек v5.7T
моделінде);
бағдарламалаушы
панелінің түйреуіштері
бойынша сигналдарды
бағдарламалық түрде
тарату мүмкіндігі;
компьютермен алмасу
жылдамдығы 460800
бодқа дейін, USB-com
адаптерлерін пайдалану
кезінде;
бағдарламалаушы
схемасы үлкен көлемді
жад
микросхемаларымен
жұмыс істеу үшін
оңтайландырылған;
разрядты жазу уақытын
қысқарту үшін
алгоритмдерді теңшеу
мүмкіндігі;
стандартты pin-to-pin
адаптерлері арқылы кезкелген жағдайда
чиптерді қолдау);
басқа
бағдарламашылардың
кез келген
адаптерлерімен және
адаптерлерімен жұмыс
істеу мүмкіндігі;
әр түрлі негіздер мен
командалар жүйесі бар
чиптерді өз бетінше
қосу мүмкіндігі;
сигналдарды қайта тағайындау үшін drag-and-drop
графикалық редакторы.ISP-әмбебап ISP
бағдарламашысы пайдаланушы құрылғысындағы
чиптерді схемаішілік бағдарламалауды қолдайды
(ISP In-system programming режимі).
5.
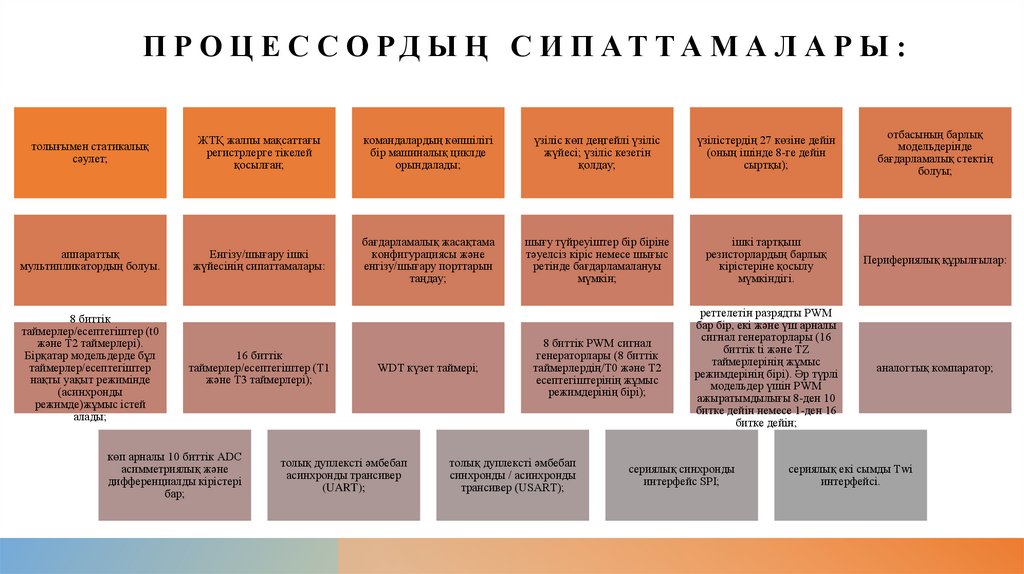
П Р О Ц Е С С О РД Ы Ң С И П АТ Т А М А Л А Р Ы :толығымен статикалық
сәулет;
ЖТҚ жалпы мақсаттағы
регистрлерге тікелей
қосылған;
командалардың көпшілігі
бір машиналық циклде
орындалады;
үзіліс көп деңгейлі үзіліс
жүйесі; үзіліс кезегін
қолдау;
үзілістердің 27 көзіне дейін
(оның ішінде 8-ге дейін
сыртқы);
отбасының барлық
модельдерінде
бағдарламалық стектің
болуы;
аппараттық
мультипликатордың болуы.
Енгізу/шығару ішкі
жүйесінің сипаттамалары:
бағдарламалық жасақтама
конфигурациясы және
енгізу/шығару порттарын
таңдау;
шығу түйреуіштер бір біріне
тәуелсіз кіріс немесе шығыс
ретінде бағдарламалануы
мүмкін;
ішкі тартқыш
резисторлардың барлық
кірістеріне қосылу
мүмкіндігі.
Перифериялық құрылғылар:
8 биттік PWM сигнал
генераторлары (8 биттік
таймерлердің/T0 және T2
есептегіштерінің жұмыс
режимдерінің бірі);
реттелетін разрядты PWM
бар бір, екі және үш арналы
сигнал генераторлары (16
биттік ti және TZ
таймерлерінің жұмыс
режимдерінің бірі). Әр түрлі
модельдер үшін PWM
ажыратымдылығы 8-ден 10
битке дейін немесе 1-ден 16
битке дейін;
аналогтық компаратор;
8 биттік
таймерлер/есептегіштер (t0
және T2 таймерлері).
Бірқатар модельдерде бұл
таймерлер/есептегіштер
нақты уақыт режимінде
(асинхронды
режимде)жұмыс істей
алады;
16 биттік
таймерлер/есептегіштер (T1
және T3 таймерлері);
көп арналы 10 биттік ADC
асимметриялық және
дифференциалды кірістері
бар;
WDT күзет таймері;
толық дуплексті әмбебап
асинхронды трансивер
(UART);
толық дуплексті әмбебап
синхронды / асинхронды
трансивер (USART);
сериялық синхронды
интерфейс SPI;
сериялық екі сымды Twi
интерфейсі.
6.
CAN-bus интерфейсі қиын жағдайларда (қатты кедергілер) жұмыс істеген кездеде деректерді зақымданудан қорғаудың жоғары деңгейін қамтамасыз етеді, бұл
ретте деректерді берудің жеткілікті үлкен жылдамдығына (1 Мбит/с дейін) қол
жеткізіледі.
Желінің жоғары дәрежесі мен сенімділігі қателерді анықтау мен түзетудің дамыған
механизмдерінің, ақаулы түйіндердің өзін-өзі оқшаулауының, электромагниттік
кедергілердің жоғары деңгейіне сезімталдықтың арқасында желілердің кең
ауқымын қамтамасыз етеді.
CAN-bus шинасы-бұл құрылғылар қосылатын желілік құрылымы бар екі сымды
интерфейс. Желінің ұштарында 1.4-суретке сәйкес 120 Ом кедергісі бар
резисторлар (Терминаторлар) орнатылған. Сигнал екі жол арқылы беріледі
can_high (CANH) және can_low (CANL). Логикалық 0 can_high-те сигнал can_lowқа қарағанда жоғары болған кезде тіркеледі. Керісінше жағдайда логикалық бірлік.
7.
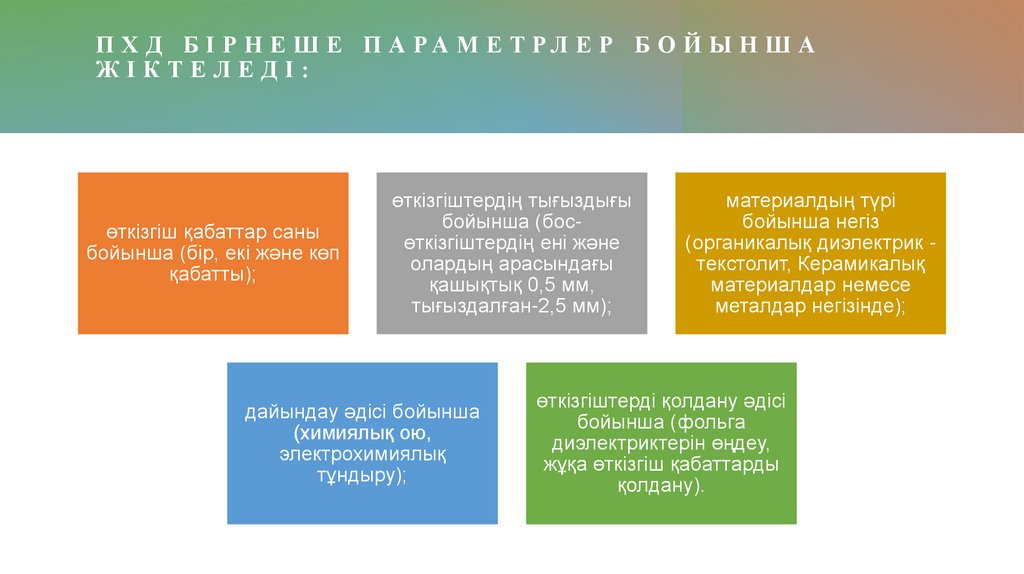
П Х Д Б І Р Н Е Ш Е П А РА М Е Т РЛ Е Р Б О Й Ы Н Ш АЖІКТЕЛЕДІ:
өткізгіш қабаттар саны
бойынша (бір, екі және көп
қабатты);
өткізгіштердің тығыздығы
бойынша (босөткізгіштердің ені және
олардың арасындағы
қашықтық 0,5 мм,
тығыздалған-2,5 мм);
дайындау әдісі бойынша
(химиялық ою,
электрохимиялық
тұндыру);
материалдың түрі
бойынша негіз
(органикалық диэлектрик текстолит, Керамикалық
материалдар немесе
металдар негізінде);
өткізгіштерді қолдану әдісі
бойынша (фольга
диэлектриктерін өңдеу,
жұқа өткізгіш қабаттарды
қолдану).
8.
Can спецификациясының алдыңғы нұсқаларында LLC және Mac ішкідеңгейлерінің функциялары, деректер деңгейі, объект деңгейі және
арна деңгейі ретінде белгіленген деңгейлерде сипатталған.
Кіші деңгейдегі ЖШҚ аймағы:
деректерді беру және
деректерді қашықтан
сұрау үшін сервисті
қамтамасыз ету;
ЖШС-нің ішкі
деңгейінде қандай
хабарламалар
қабылдануы керек
екендігі туралы шешім;
қалпына келтіруді
басқару құралдарымен
қамтамасыз ету және
шамадан тыс жүктеме
туралы хабарлау.
9.
C A N И Н Т Е Р Ф Е Й С І Б А Р Қ Ұ Р Ы Л Ғ Ы Л А Р А Д А М Ө М І Р І Н І Ң Ә Р Т Ү РЛ ІА С П Е К Т І Л Е Р І Н Е Қ А Т Ы С Т Ы К Ө П Т Е Г Е Н Қ О Л Д А Н Б А Л А Р Д А
Қ О Л Д А Н Ы Л А Д Ы . О Л А Р Д Ы Ң І Ш І Н Д Е Н Е Г І З Г І Л Е Р І Н А Ж Ы Р А Т У Ғ А
Б О Л А Д Ы :
көлік - CAN бастапқыда ішкі
автомобиль желілерінде пайдалануға
арналған;
өндіріс - CAN өндірістік өнеркәсіптің
әртүрлі салаларында қолданылады,
негізінен кіріктірілген басқару
құрылғыларын басқару үшін, сонымен
қатар зауыттық автоматтандыру,
процестерді автоматтандыру және
энергия өндірісі үшін қолданылады;
ауыл шаруашылығы - CAN
стационарлық ауылшаруашылық
жабдықтарында, сондай-ақ
ауылшаруашылық және орман
шаруашылығы көліктерінде
қолданылады;
құрылыс-CAN жол талғамайтын көлікте
ішкі желі ретінде қолданылады
(мысалы, жол салу үшін), ғимараттарды
автоматтандыру үшін, мысалы,
лифттерді басқару үшін, автоматты
есіктерді кіріктірілген бақылау үшін,
жылыту, желдету және кондиционерлеу
жүйелерін бақылау үшін;
медицина-CAN операциялық
бөлмелерде және қарқынды
станцияларда медициналық құрылғылар
мен жабдықтарда кіріктірілген желі
ретінде қолданылады.
10.
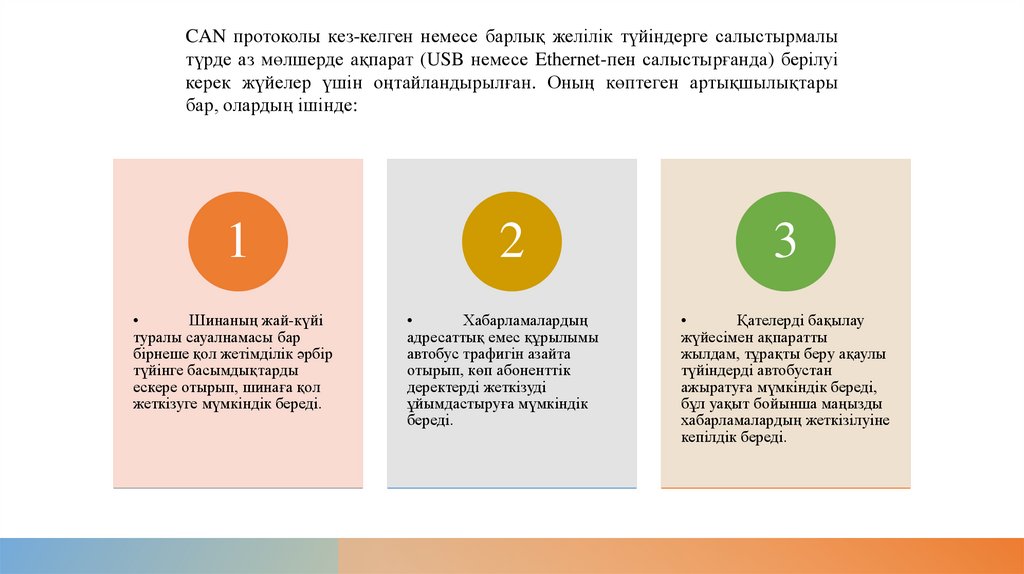
CAN протоколы кез-келген немесе барлық желілік түйіндерге салыстырмалытүрде аз мөлшерде ақпарат (USB немесе Ethernet-пен салыстырғанда) берілуі
керек жүйелер үшін оңтайландырылған. Оның көптеген артықшылықтары
бар, олардың ішінде:
1
2
3
Шинаның жай-күйі
туралы сауалнамасы бар
бірнеше қол жетімділік әрбір
түйінге басымдықтарды
ескере отырып, шинаға қол
жеткізуге мүмкіндік береді.
Хабарламалардың
адресаттық емес құрылымы
автобус трафигін азайта
отырып, көп абоненттік
деректерді жеткізуді
ұйымдастыруға мүмкіндік
береді.
Қателерді бақылау
жүйесімен ақпаратты
жылдам, тұрақты беру ақаулы
түйіндерді автобустан
ажыратуға мүмкіндік береді,
бұл уақыт бойынша маңызды
хабарламалардың жеткізілуіне
кепілдік береді.