
































 Механика
МеханикаПохожие презентации:










Практическое занятие "Кинематический анализ плоских стержневых конструкций"
1.
СТРОИТЕЛЬНАЯ МЕХАНИКАЦель курса: Изучение методов
статического и динамического
расчетов инженерных сооружений
04.08.2023
ПГУ, преподаватель Турищев Л.С.
1
2.
Тема практического занятияКинематический анализ
плоских стержневых
конструкций
Преподаватель, доцент кафедры
прикладной механики и графики
Турищев Леонид Степанович
04.08.2023
ПГУ, преподаватель Турищев Л.С.
2
3.
Цель практического занятия научитьсяопределять для плоских стержневых
систем (конструкций) кинематические и
статические признаки
04.08.2023
ПГУ, преподаватель Турищев Л.С.
3
4.
Указания к решению задач04.08.2023
ПГУ, преподаватель Турищев Л.С.
4
5.
Определение кинематических и статическихпризнаков плоских стержневых систем
основываются на двух процедурах:
-подсчете числа степеней свободы расчетной схемы
плоской стержневой системы
-анализе геометрической структуры расчетной схемы
плоской стержневой системы
Две указанные процедуры и составляют суть кинематического анализа плоских стержневых систем
04.08.2023
ПГУ, преподаватель Турищев Л.С.
5
6.
Алгоритм кинематического анализаплоской стержневой системы
Изобразить расчетную схему системы в виде
кинематической цепи
Подсчитать число Д, У, Ш, С, СО
Подсчитать W
Сделать вывод о кинематических и статических
свойствах системы, если W>0
04.08.2023
ПГУ, преподаватель Турищев Л.С.
6
7.
Алгоритм кинематического анализаплоской стержневой системы
Изобразить расчетную схему системы в виде
кинематической цепи
Подсчитать число Д, У, Ш, С, СО
Подсчитать W
Сделать вывод о кинематических и статических
свойствах системы, если W>0
Провести анализ геометрической структуры, если
W 0
04.08.2023
ПГУ, преподаватель Турищев Л.С.
7
8.
Алгоритм кинематического анализаплоской стержневой системы
Изобразить расчетную схему системы в виде
кинематической цепи
Подсчитать число Д, У, Ш, С, СО
Подсчитать W
Сделать вывод о кинематических и статических
свойствах системы, если W>0
Провести анализ геометрической структуры, если
W 0
Сделать вывод о кинематических и статических
свойствах системы с учетом результатов анализа её
геометрической структуры
04.08.2023
ПГУ, преподаватель Турищев Л.С.
8
9.
Образование кинематической цепизаключается в изображении расчетной схемы плоской
стержневой системы в виде совокупности дисков и узлов
с наложенными связями (шарниры, внутренние и
опорные стержни)
04.08.2023
ПГУ, преподаватель Турищев Л.С.
9
10.
Особенности образованиякинематической цепи
Так как одни и те же элементы стержневой системы
могут рассматриваться, как её части, приносящие
степени свободы (диски, узлы), так и как части их
уничтожающие (наложенные связи), то возможно
образование кинематической цепи различными способами
и, как следствие этого, получение для одной и той же
системы нескольких вариантов изображения цепи
04.08.2023
ПГУ, преподаватель Турищев Л.С.
10
11.
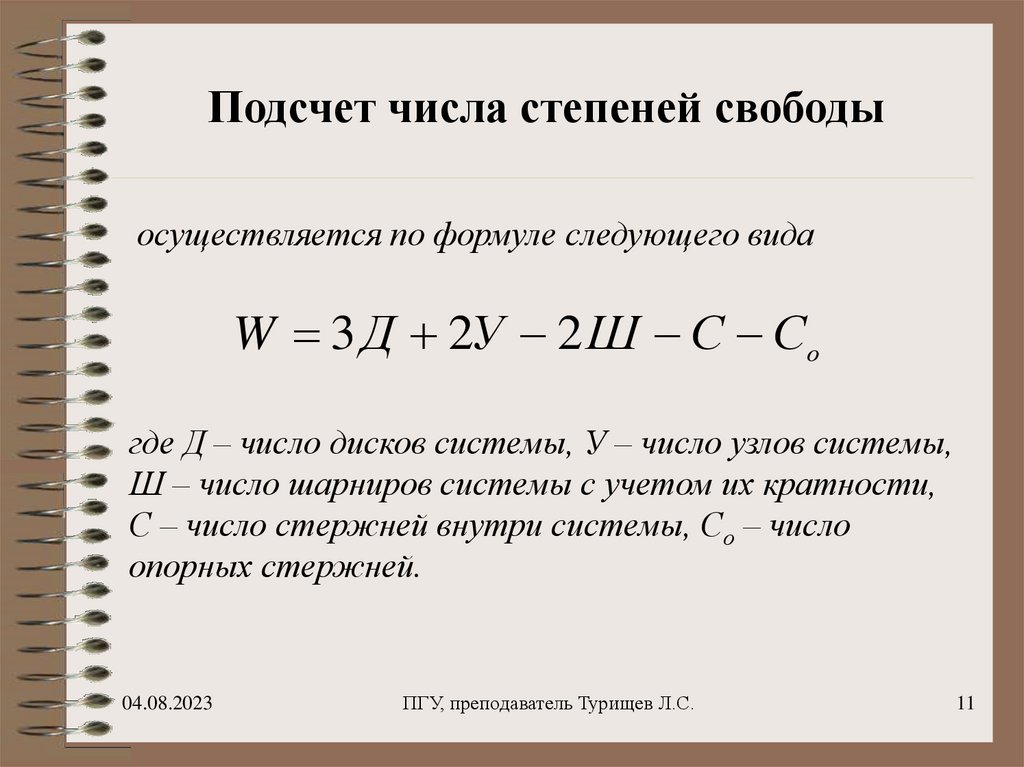
Подсчет числа степеней свободыосуществляется по формуле следующего вида
W 3 Д 2У 2 Ш С Со
где Д – число дисков системы, У – число узлов системы,
Ш – число шарниров системы с учетом их кратности,
С – число стержней внутри системы, Со – число
опорных стержней.
04.08.2023
ПГУ, преподаватель Турищев Л.С.
11
12.
Две особенности подсчета числастепеней свободы
1.Подсчет числа степеней свободы плоской стержневой
системы не зависит от способа образования
кинематической цепи
2.Подсчет числа шарниров осуществляется с учетом
степени их кратности
Степень кратности шарнира равняется числу
соединяемых дисков минус единица
04.08.2023
ПГУ, преподаватель Турищев Л.С.
12
13.
Исходы при подсчете числа степенейсвободы
При подсчете числа степеней свободы стержневой
системы возможны три исхода:
W 0
- система геометрически изменяемая
W 0
- система геометрически неизменяемая
с необходимым числом связей
W 0
- система геометрически неизменяемая
с избыточным числом связей
В случае, если W 0 подсчет числа степеней
дополняется анализом геометрической структуры
04.08.2023
ПГУ, преподаватель Турищев Л.С.
13
14.
Анализ геометрической структурыСуть анализа
Рассмотрение
схем
соединения
элементов
кинематической цепи между собой и с диском
«земля»
Цель анализа
Поиск схем соединения элементов кинематической
цепи между собой и с диском «земля», приводящих к
образованию мгновенного центра вращения
04.08.2023
ПГУ, преподаватель Турищев Л.С.
14
15.
Основные схемы соединения элементовкинематической цепи между собой
Правильное соединение
Неправильное соединение
04.08.2023
ПГУ,ПГУ,
преподаватель
кафедра механики
Турищев Л.С.
15
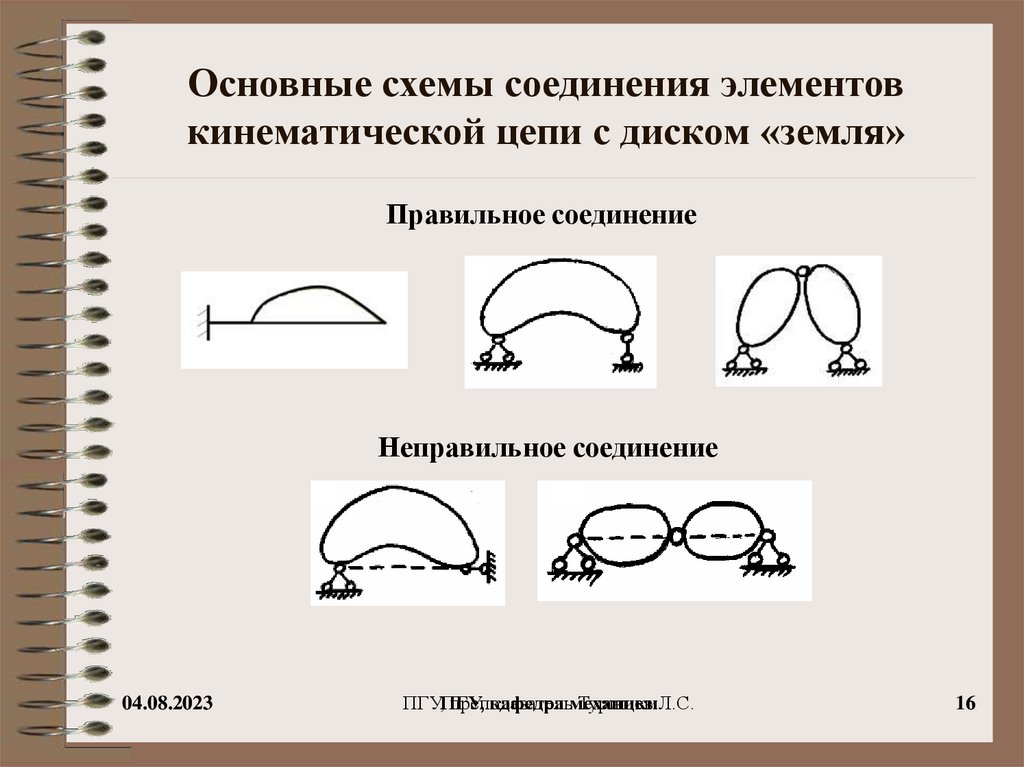
16.
Основные схемы соединения элементовкинематической цепи с диском «земля»
Правильное соединение
Неправильное соединение
04.08.2023
ПГУ,ПГУ,
преподаватель
кафедра механики
Турищев Л.С.
16
17.
Задача04.08.2023
ПГУ, преподаватель Турищев Л.С.
17
18.
ТребуетсяДля заданной стержневой системы дать заключение
о ее кинематических и статических признаках
04.08.2023
ПГУ, преподаватель Турищев Л.С.
18
19.
1-ый вариант образованиякинематической цепи и подсчета
числа степеней свободы
04.08.2023
ПГУ, преподаватель Турищев Л.С.
19
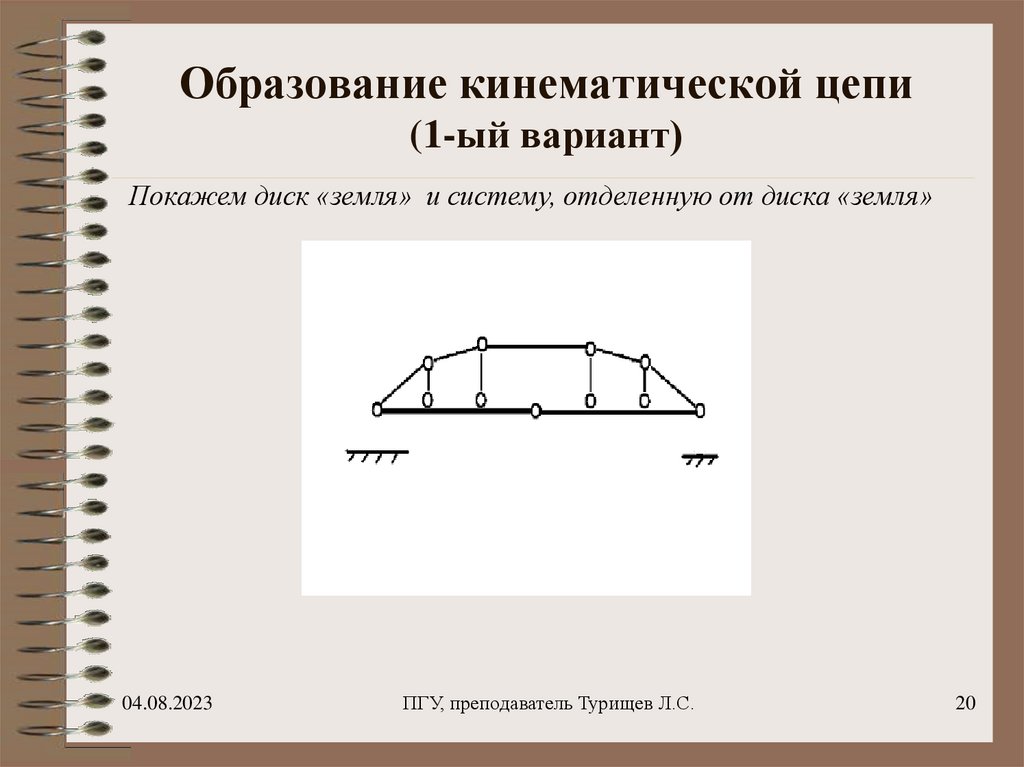
20.
Образование кинематической цепи(1-ый вариант)
Покажем диск «земля» и систему, отделенную от диска «земля»
04.08.2023
ПГУ, преподаватель Турищев Л.С.
20
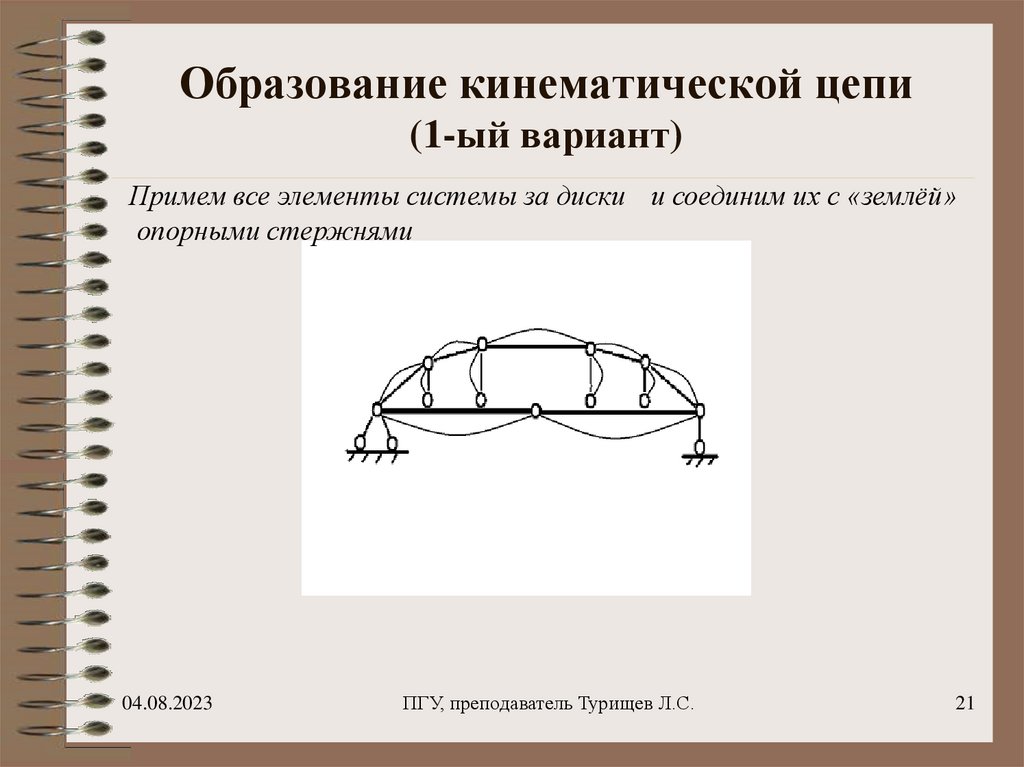
21.
Образование кинематической цепи(1-ый вариант)
Примем все элементы системы за диски и соединим их с «землёй»
опорными стержнями
04.08.2023
ПГУ, преподаватель Турищев Л.С.
21
22.
Образование кинематической цепи(1-ый вариант)
Полученное изображение системы и является 1-ым вариантом
кинематической цепи
04.08.2023
ПГУ, преподаватель Турищев Л.С.
22
23.
Подсчет элементов для 1-го вариантакинематической цепи
Рассмотрим кинематическую цепь без опорных стержней
04.08.2023
ПГУ, преподаватель Турищев Л.С.
23
24.
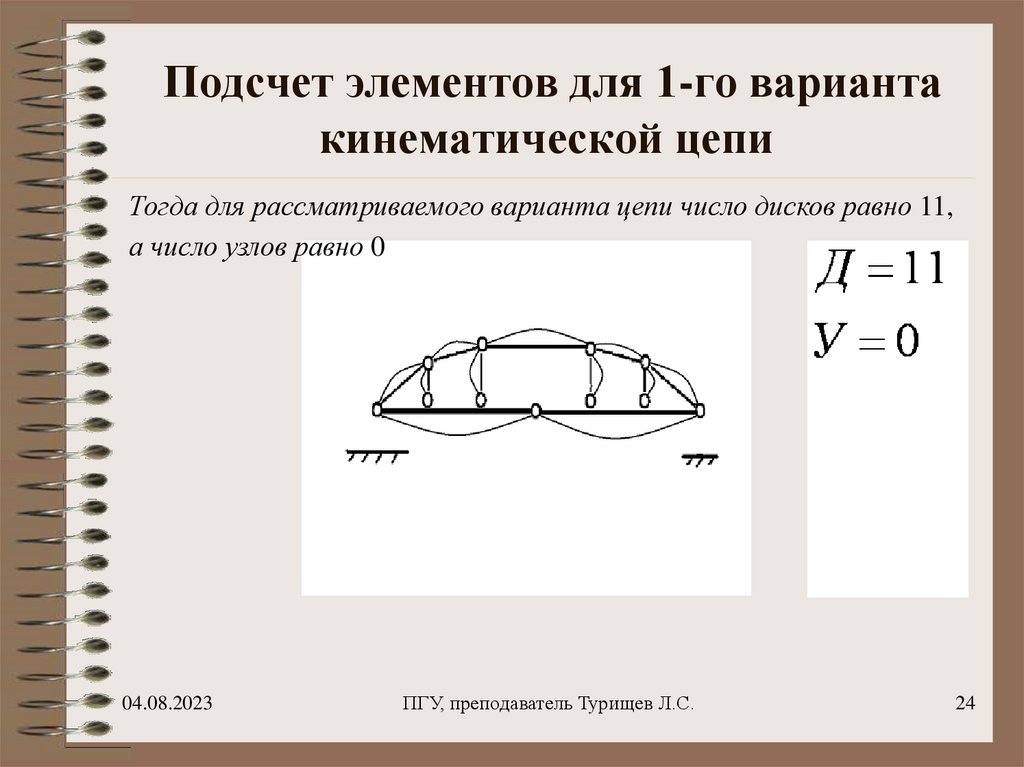
Подсчет элементов для 1-го вариантакинематической цепи
Тогда для рассматриваемого варианта цепи число дисков равно 11,
а число узлов равно 0
04.08.2023
ПГУ, преподаватель Турищев Л.С.
24
25.
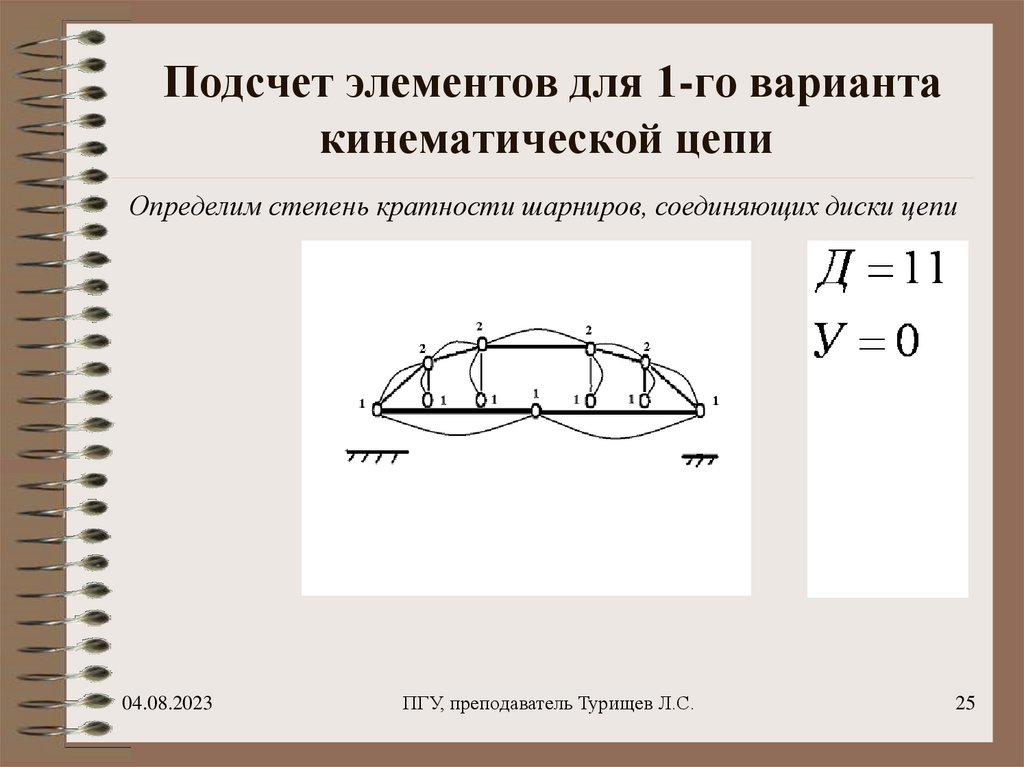
Подсчет элементов для 1-го вариантакинематической цепи
Определим степень кратности шарниров, соединяющих диски цепи
04.08.2023
ПГУ, преподаватель Турищев Л.С.
25
26.
Подсчет элементов для 1-го вариантакинематической цепи
Тогда общее число шарниров, соединяющих диски цепи, равно 15
04.08.2023
ПГУ, преподаватель Турищев Л.С.
26
27.
Подсчет элементов для 1-го вариантакинематической цепи
Так как все элементы системы приняты за диски, то стержней нет
04.08.2023
ПГУ, преподаватель Турищев Л.С.
27
28.
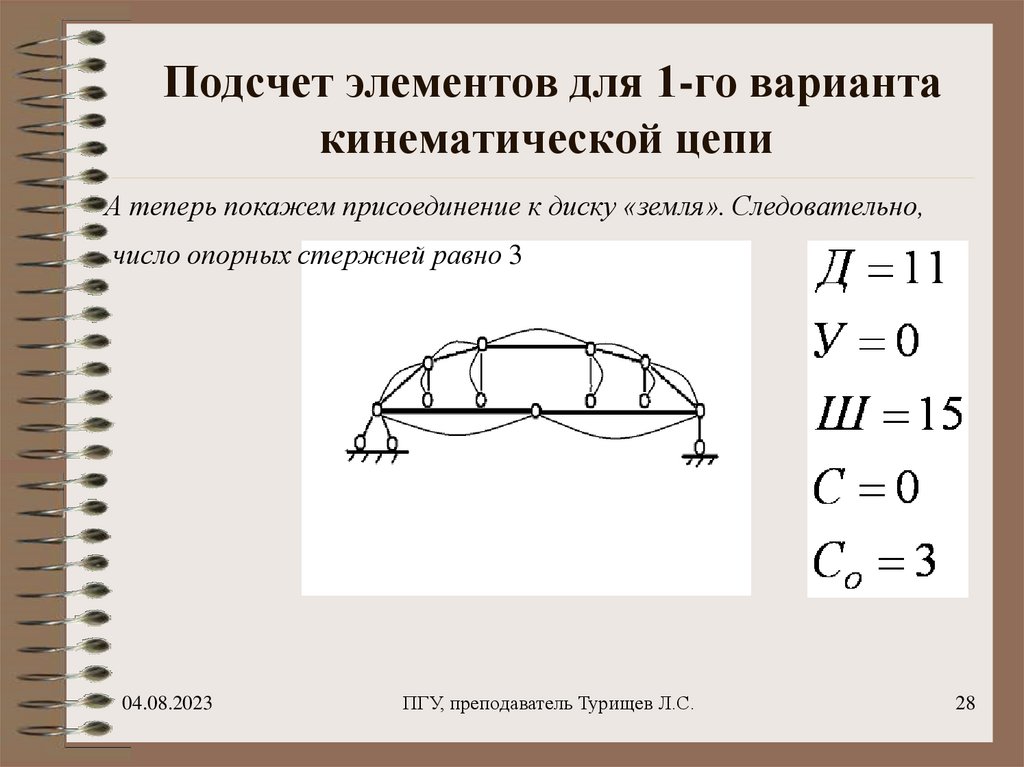
Подсчет элементов для 1-го вариантакинематической цепи
А теперь покажем присоединение к диску «земля». Следовательно,
число опорных стержней равно 3
04.08.2023
ПГУ, преподаватель Турищев Л.С.
28
29.
Подсчет числа степеней свободы для1-го варианта кинематической цепи
Согласно формуле
04.08.2023
получим
ПГУ, преподаватель Турищев Л.С.
29
30.
2-ой вариант образованиякинематической цепи и подсчета
числа степеней свободы
04.08.2023
ПГУ, преподаватель Турищев Л.С.
30
31.
Образование кинематической цепи(2-ой вариант)
Покажем диск «земля» и два нижних элемента системы
04.08.2023
ПГУ, преподаватель Турищев Л.С.
31
32.
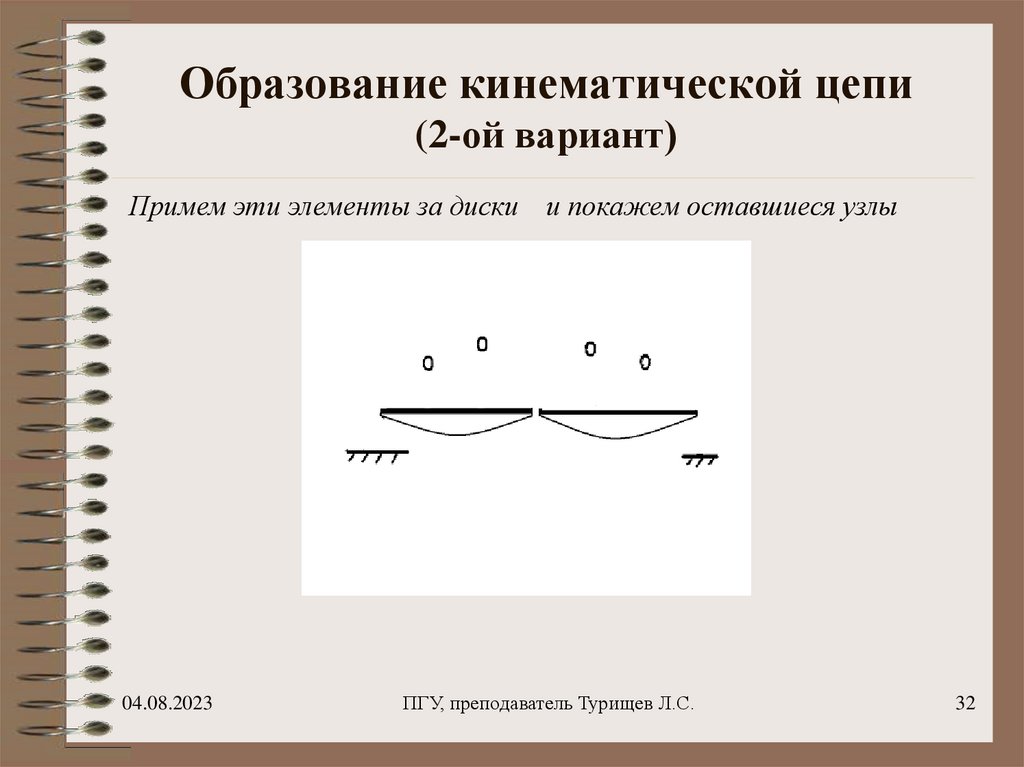
Образование кинематической цепи(2-ой вариант)
Примем эти элементы за диски и покажем оставшиеся узлы
04.08.2023
ПГУ, преподаватель Турищев Л.С.
32
33.
Образование кинематической цепи(2-ой вариант)
Покажем шарнирное соединение дисков и стержневое соединение узлов
и дисков
04.08.2023
ПГУ, преподаватель Турищев Л.С.
33
34.
Образование кинематической цепи(2-ой вариант)
Соединим полученную систему с диском «земля»
04.08.2023
ПГУ, преподаватель Турищев Л.С.
34
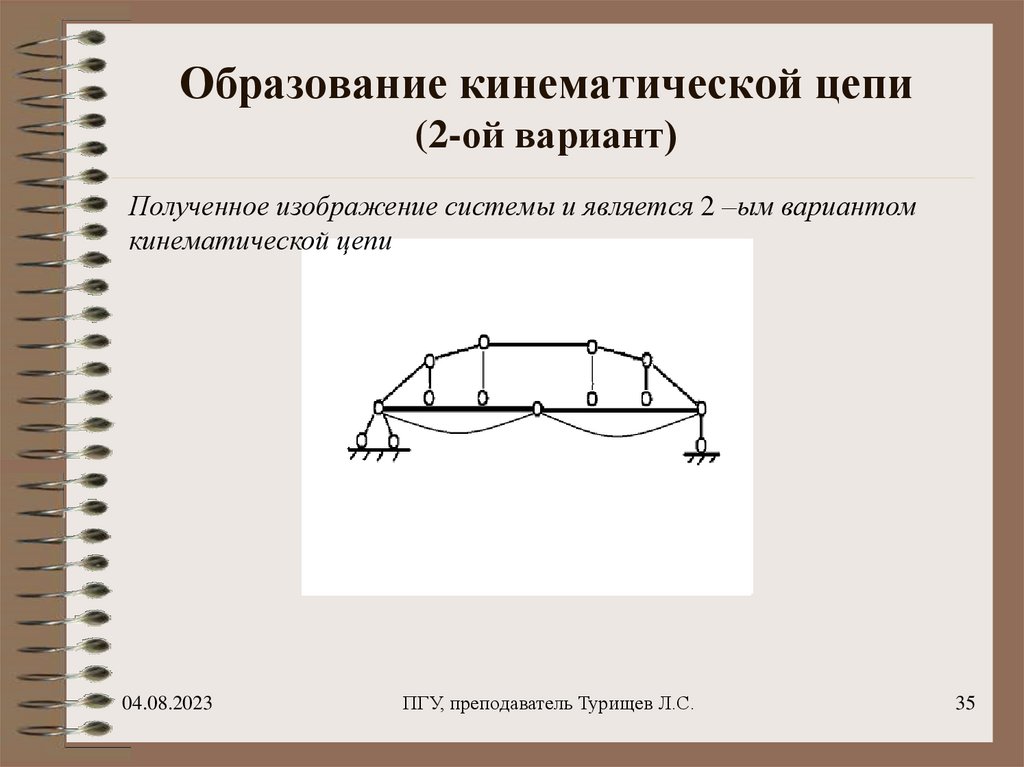
35.
Образование кинематической цепи(2-ой вариант)
Полученное изображение системы и является 2 –ым вариантом
кинематической цепи
04.08.2023
ПГУ, преподаватель Турищев Л.С.
35
36.
Подсчет элементов для 2-го вариантакинематической цепи
Рассмотрим кинематическую цепь без опорных стержней
04.08.2023
ПГУ, преподаватель Турищев Л.С.
36
37.
Подсчет элементов для 2-го вариантакинематической цепи
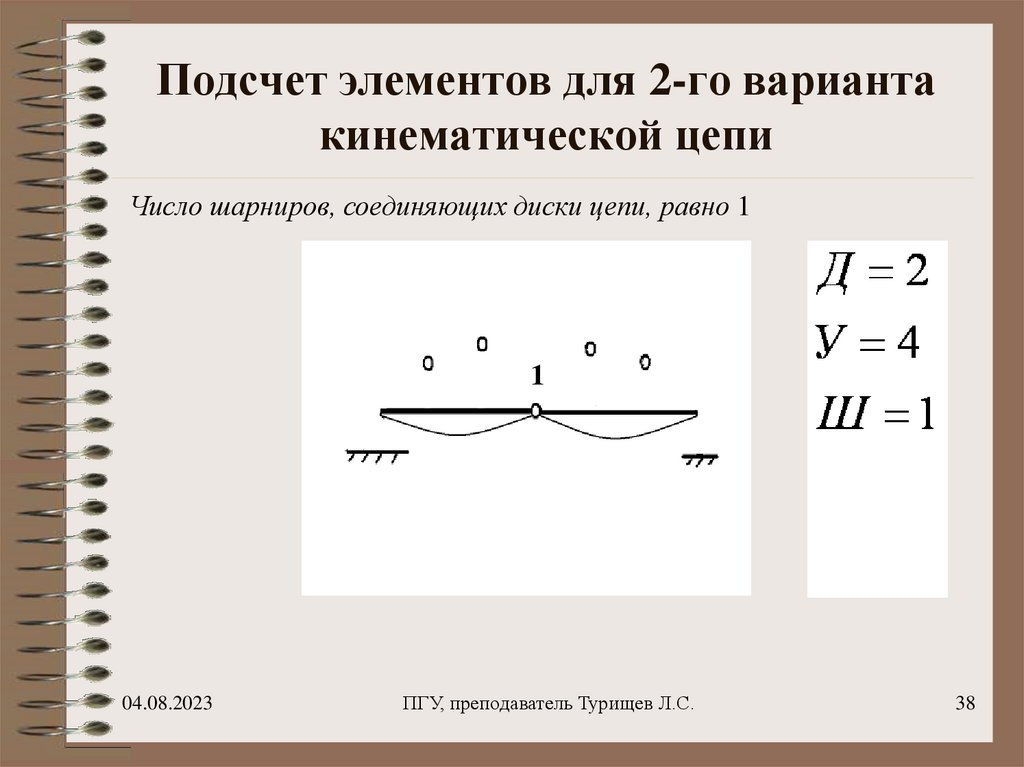
Тогда для рассматриваемого варианта цепи число дисков равно 2,
а число узлов равно 4
04.08.2023
ПГУ, преподаватель Турищев Л.С.
37
38.
Подсчет элементов для 2-го вариантакинематической цепи
Число шарниров, соединяющих диски цепи, равно 1
1
04.08.2023
ПГУ, преподаватель Турищев Л.С.
38
39.
Подсчет элементов для 2-го вариантакинематической цепи
А число стержней, соединяющих диски и узлы цепи, равно 9
04.08.2023
ПГУ, преподаватель Турищев Л.С.
39
40.
Подсчет элементов для 2-го вариантакинематической цепи
А теперь покажем присоединение к диску «земля». Следовательно,
число опорных стержней равно 3
04.08.2023
ПГУ, преподаватель Турищев Л.С.
40
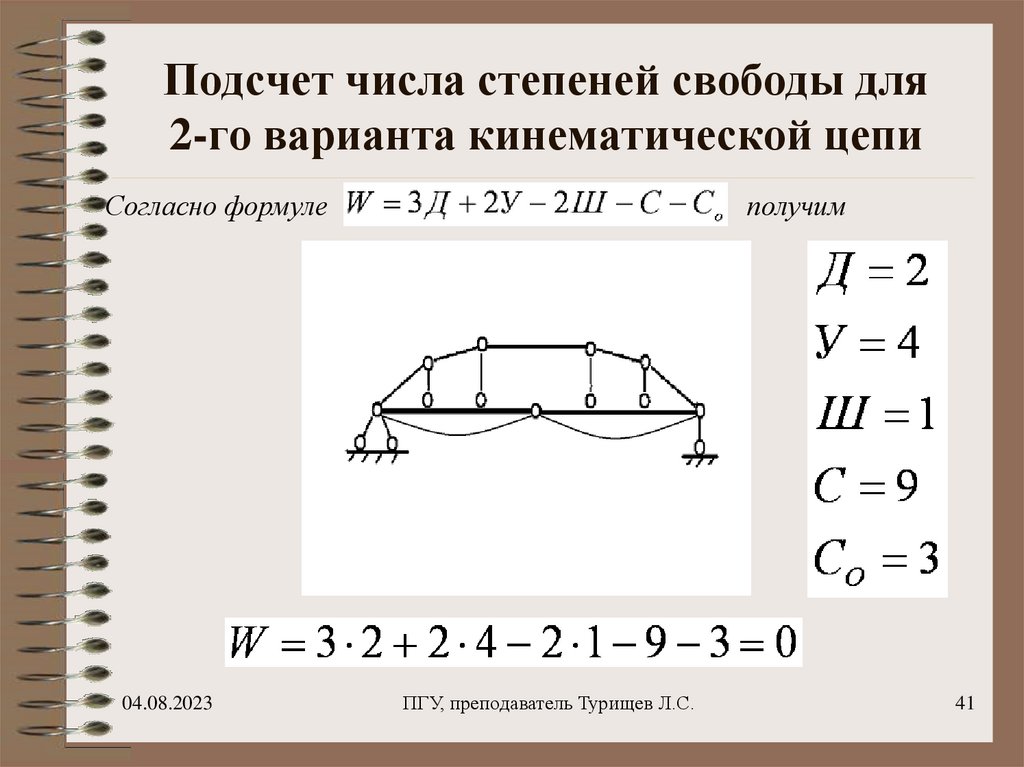
41.
Подсчет числа степеней свободы для2-го варианта кинематической цепи
Согласно формуле
04.08.2023
получим
ПГУ, преподаватель Турищев Л.С.
41
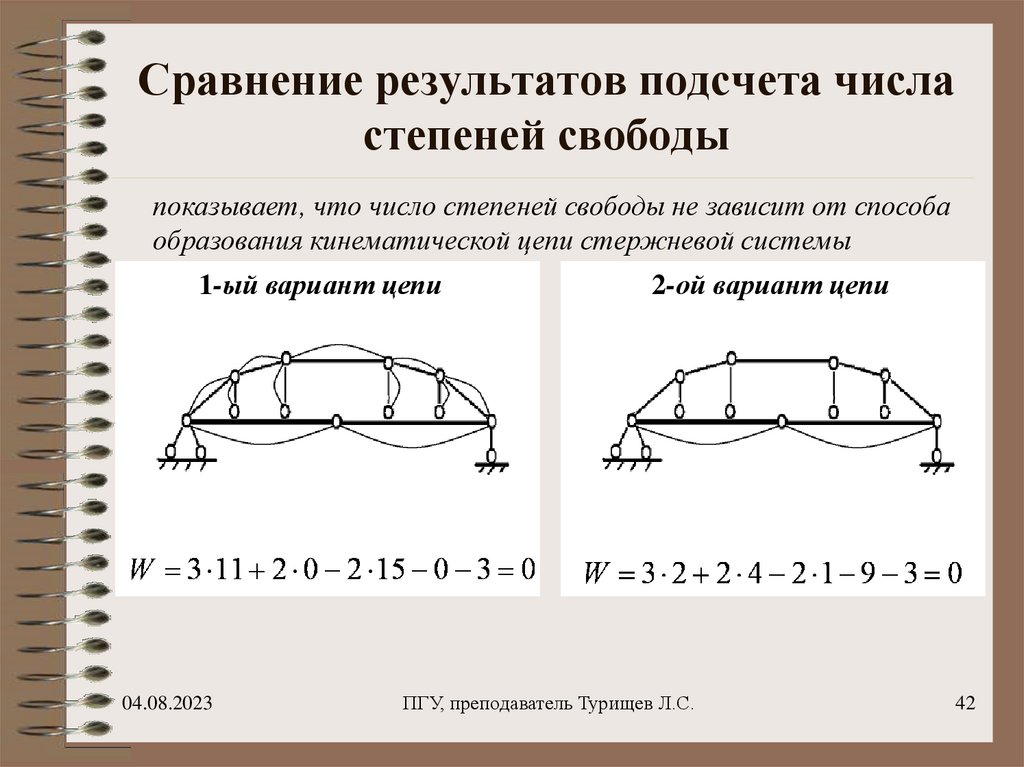
42.
Сравнение результатов подсчета числастепеней свободы
показывает, что число степеней свободы не зависит от способа
образования кинематической цепи стержневой системы
1-ый вариант цепи
04.08.2023
2-ой вариант цепи
ПГУ, преподаватель Турищев Л.С.
42
43.
Заключение о полученном результатеподсчета числа степеней свободы
Так как W = 0, то необходимо провести анализ геометрической
структуры стержневой системы
1-ый вариант цепи
04.08.2023
2-ой вариант цепи
ПГУ, преподаватель Турищев Л.С.
43
44.
Анализ геометрической структурыПримем элемент системы за диск, который обозначим буквой А
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
44
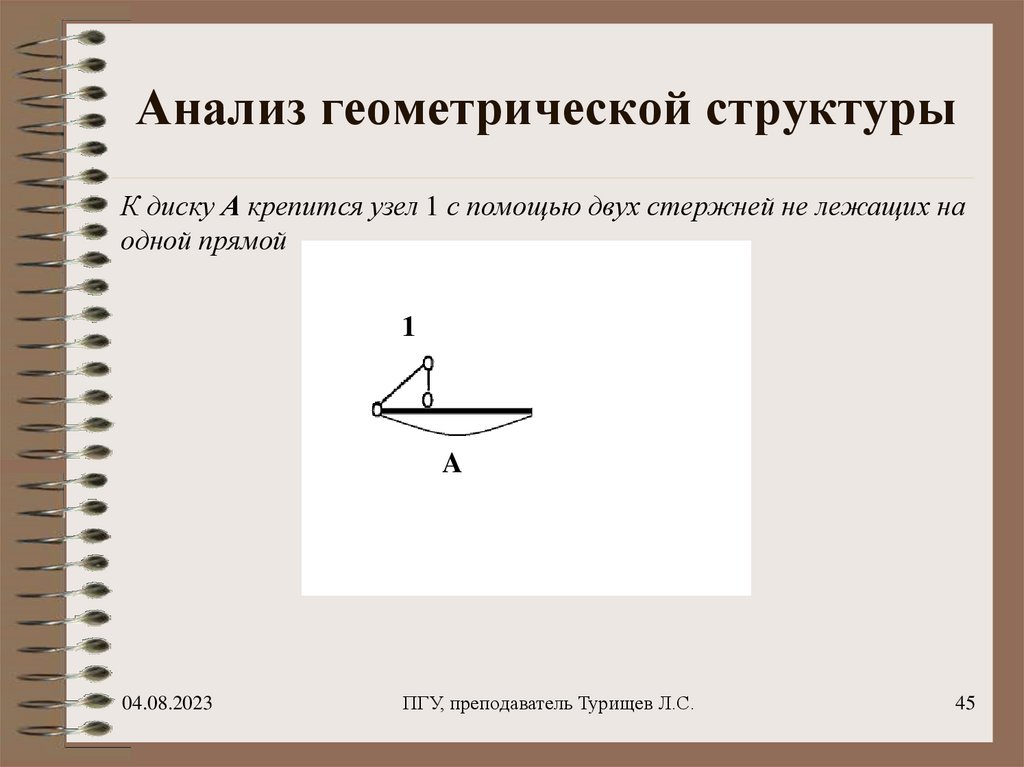
45.
Анализ геометрической структурыК диску А крепится узел 1 с помощью двух стержней не лежащих на
одной прямой
1
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
45
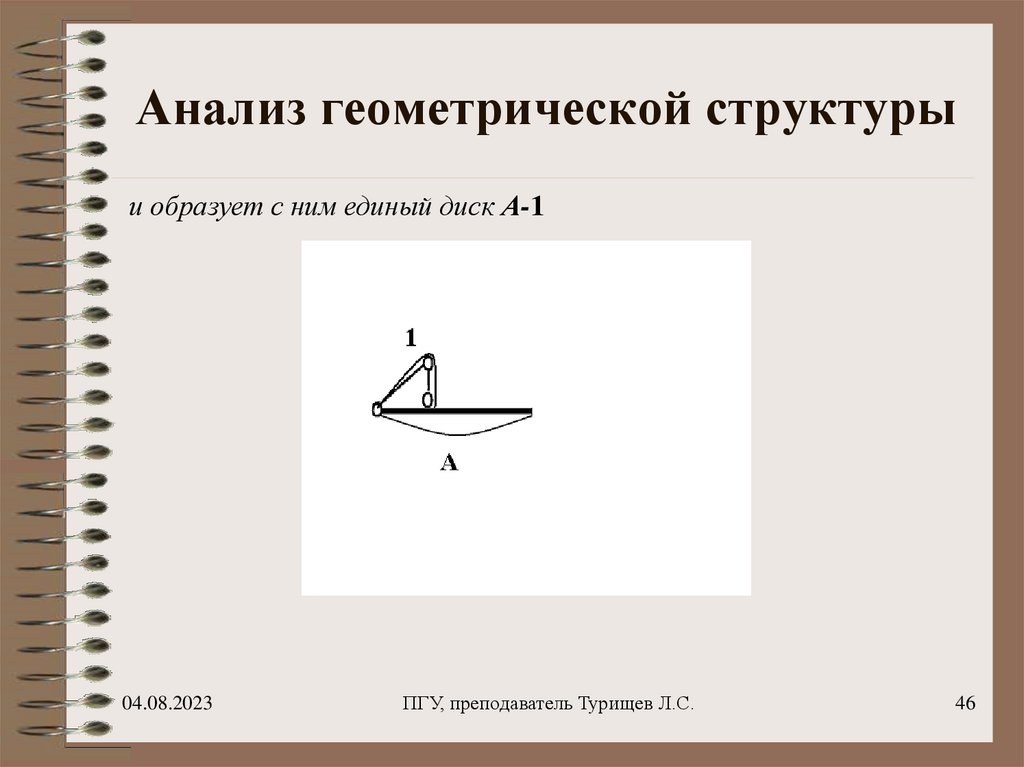
46.
Анализ геометрической структурыи образует с ним единый диск А-1
1
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
46
47.
Анализ геометрической структурыК диску А-1 крепится узел 2 с помощью двух стержней не лежащих на
одной прямой
1
2
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
47
48.
Анализ геометрической структурыи образует с ним единый диск А-1-2
1
2
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
48
49.
Анализ геометрической структурыРассуждая аналогично, получим справа второй диск В-3-4
1
2
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
49
50.
Анализ геометрической структурыИмеем два диска, соединенные шарниром и стержнем, которые не
лежат на одной прямой,
1
2
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
50
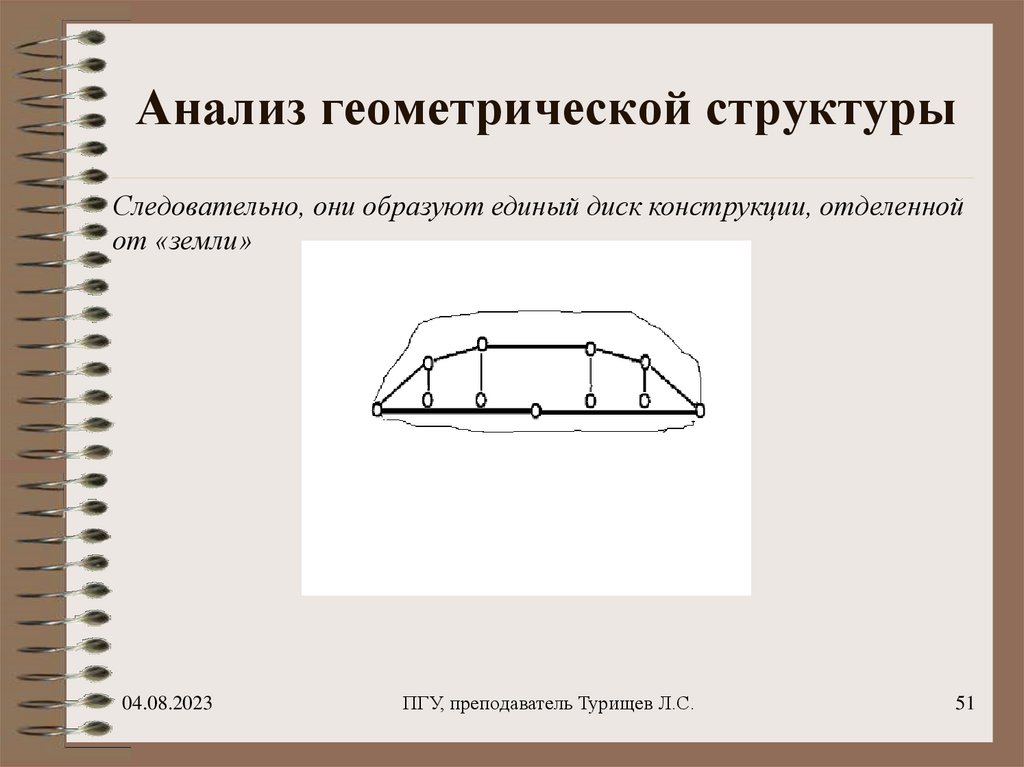
51.
Анализ геометрической структурыСледовательно, они образуют единый диск конструкции, отделенной
от «земли»
1
2
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
51
52.
Анализ геометрической структурыИмеем диск конструкции и диск «земля»,
1
2
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
52
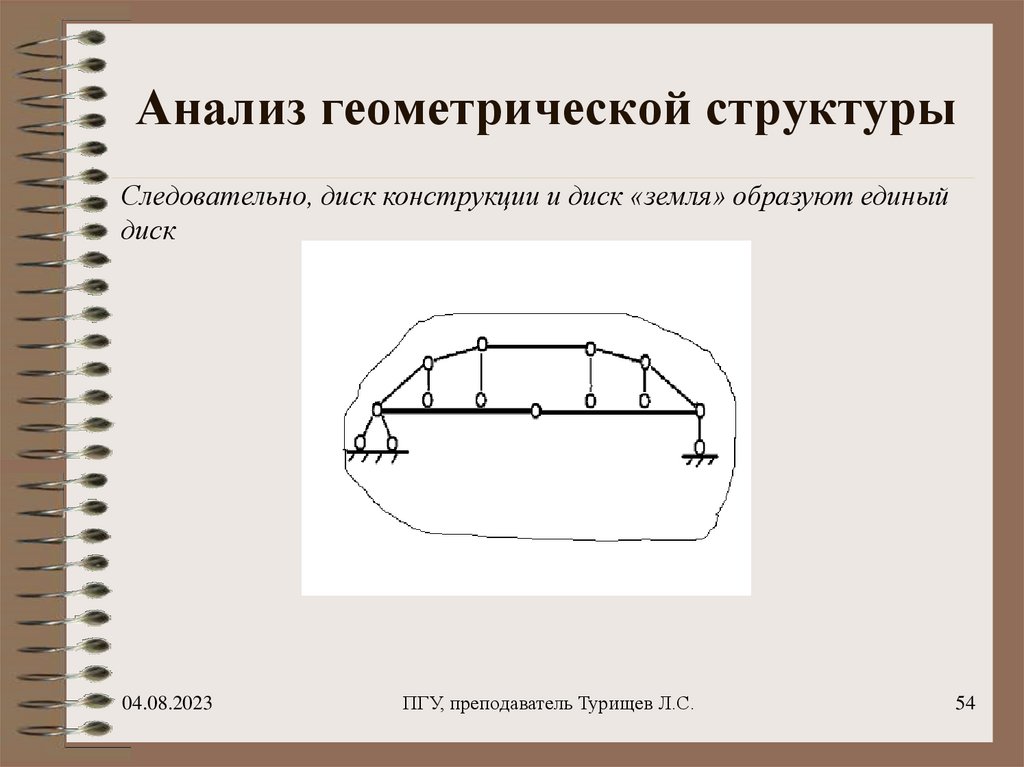
53.
Анализ геометрической структурыИмеем диск конструкции и диск «земля», соединяющиеся между собой
тремя опорными стержнями, которые не параллельны друг другу и не
пересекаются в одной точке
1
2
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
53
54.
Анализ геометрической структурыСледовательно, диск конструкции и диск «земля» образуют единый
диск
1
2
A
04.08.2023
ПГУ, преподаватель Турищев Л.С.
54
55.
Вывод о кинематических и статическихпризнаках стержневой системы
W=0
1.Система геометрически неизменяемая с необходимым
числом связей.
2.Система статически определимая.
04.08.2023
ПГУ, преподаватель Турищев Л.С.
55
56.
Задачи для самостоятельногорешения
04.08.2023
ПГУ, преподаватель Турищев Л.С.
56
57.
Задача №104.08.2023
ПГУ, преподаватель Турищев Л.С.
57
58.
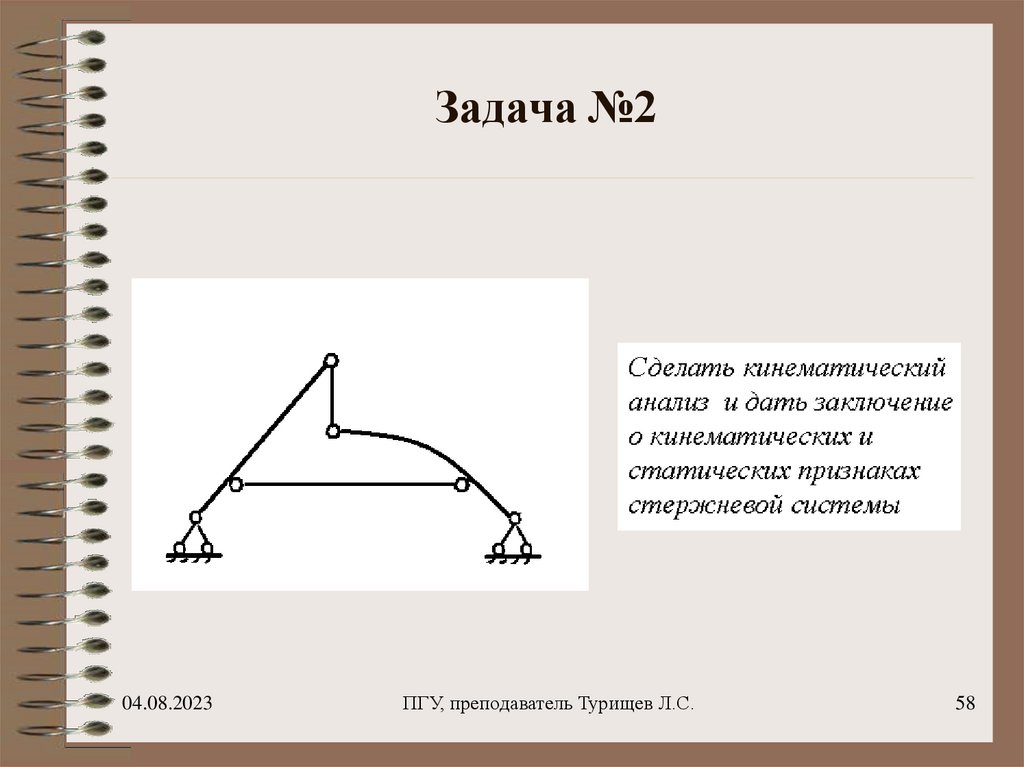
Задача №204.08.2023
ПГУ, преподаватель Турищев Л.С.
58
59.
Задача №304.08.2023
ПГУ, преподаватель Турищев Л.С.
59