

















 Физика
ФизикаПохожие презентации:


")







Техническая механика. Основные понятия и аксиомы статики. Связи и их реакции
1.
Техническая механикаОсновные понятия и
аксиомы статики. Связи и
их реакции.
1. Основные понятия
2. Аксиомы статики
3. Связи и их реакции
2.
МЕХАНИКА – наука о механическомдвижении и взаимодействии тел.
Механическое движение – это
изменение с течением времени взаимного
положения в пространстве материальных
тел.
3.
Механика – одна из самых древних наук.Термин
«механика» ввел
выдающийся
философ древности Аристотель
4.
Первые основы учения о равновесии телсодержатся в трудах Архимеда
5.
Ученые-механики помогли в освоениикосмоса.
Русский ученый,
изобретатель К.Э.
Циолковский – заложил
теорию космических
полетов.
Ученый, академик С.П.
Королев – конструктор
космических кораблей
«Восток» и «Восход»
6.
По словам академика А.Ю. Ишлинского:Механика имеет отношение ко
всем явлениям природы и
творениям техники, ко всем
естественным научным
дисциплинам. Ни одно
явление природы не может
быть понято без уяснения его
механической стороны, ни
одно творение техники нельзя
создать, не принимая в расчет
те или иные механические
закономерности.
7.
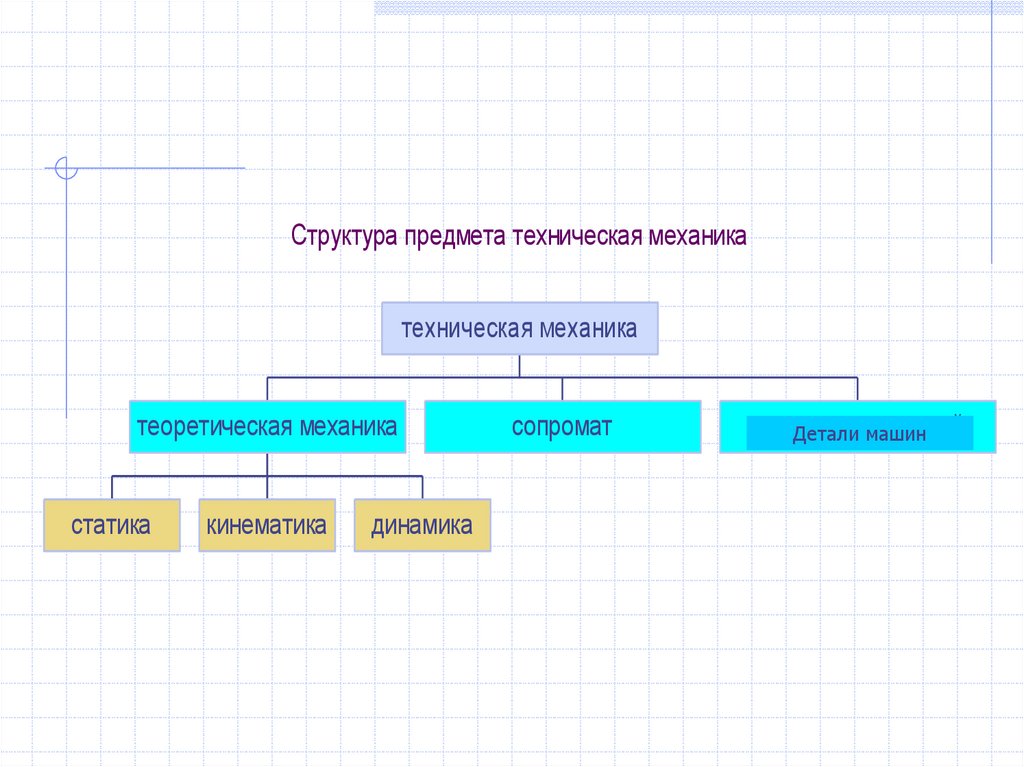
Структура предмета техническая механикатехническая механика
теоретическая механика
статика
кинематика
динамика
сопромат
статика
сооружений
Детали
машин
8.
Основные понятия статикиСтатика – часть теоретической механики,
изучает условия равновесия тел.
Равновесие – состояние покоя или
равномерного прямолинейного движения.
Абсолютно твердое тело –
недеформируемое абстрактное тело.
Материальная точка – точка имеющая
массу и малые размеры.
9.
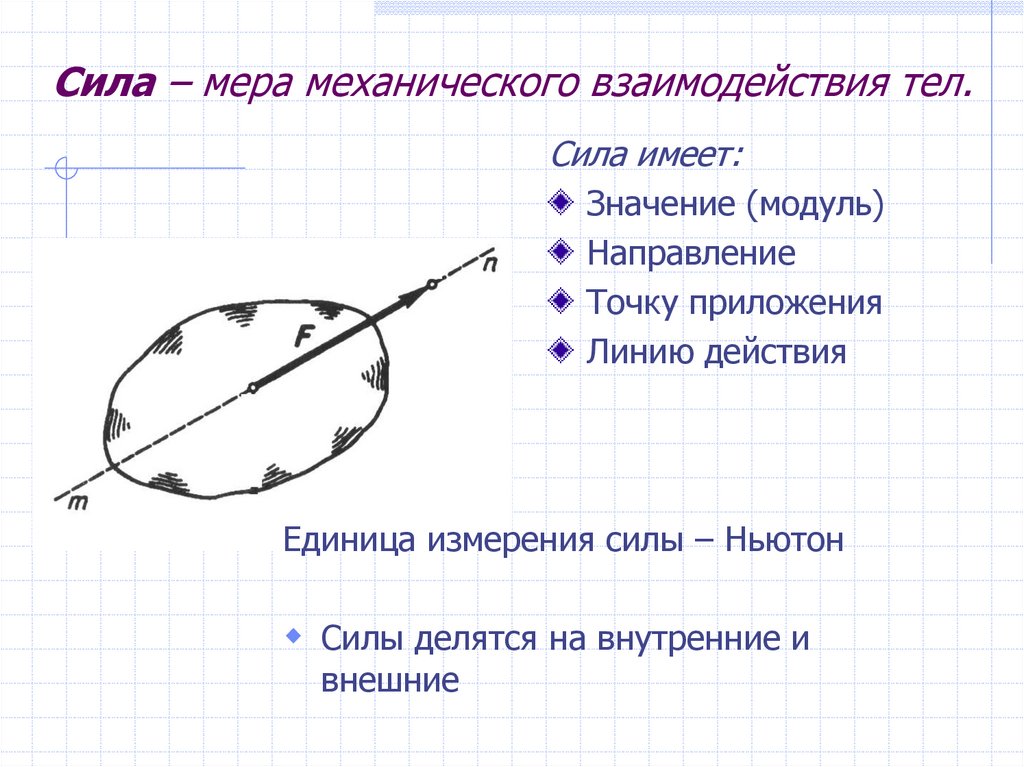
Сила – мера механического взаимодействия тел.Сила имеет:
Значение (модуль)
Направление
Точку приложения
Линию действия
Единица измерения силы – Ньютон
Силы делятся на внутренние и
внешние
10.
2.Основные аксиомы статики
сформулированы английским ученым
Исааком Ньютоном
11.
Аксиома №1– аксиома инерции(первый закон Ньютона)
Всякое тело находится в
равновесии, пока какие-нибудь
силы не выведут его из этого
состояния.
12.
Аксиома №2– аксиома взаимодействия(третий закон Ньютона)
Силы взаимодействия двух тел всегда
равны по модулю, направлены по
одной прямой в противоположные
стороны.
13.
Аксиома №3– условие равновесияДля равновесия свободного твердого
тела, которое находится под
действием двух сил, необходимо и
достаточно, чтобы эти силы
равнялись по модулю и были
направлены по одной прямой в
противоположные стороны.
14.
Аксиома №4Равновесие твердого тела не
нарушится, если к нему приложить
или удалить уравновешенную
систему сил.
15.
Следствие из аксиом №3 и 4Механическое состояние твердого
тела не нарушится, если силу
перенести вдоль линии её действия.
16.
Аксиома №5– аксиомапараллелограмма
Если две силы
приложены к телу в
одной точке, то чтобы
найти их
равнодействующую
нужно построить на
этих силах
параллелограмм, его
диагональ и будет
равнодействующей
силой.
17.
Понятия:Совокупность приложенных к телу сил называется
системой сил.
Система сил уравновешена, если при
приложении или удалении её равновесие тела не
нарушается.
Если одна сила эквивалентна системе сил, то её
называют равнодействующей.
Если сила уравновешивает систему сил, то её
называют уравновешивающей.
18.
3.Связи – это ограничения, которые наложены на
тело в пространстве,не дающие ему
перемещаться в том или ином направлении.
Сила, с которой тело действует на связь
называется давлением, а сила, с которой связь
действует на тело, называется реакцией.
19.
Правило определения направленияреакции связи:
Направление реакции всегда
противоположно направлению
перемещения, которое
ограничивается данной связью.
20.
Принцип освобождения отсвязей:
Всякое несвободное тело можно
рассматривать как свободное,
если отбросить связи и заменить
их реакциями.
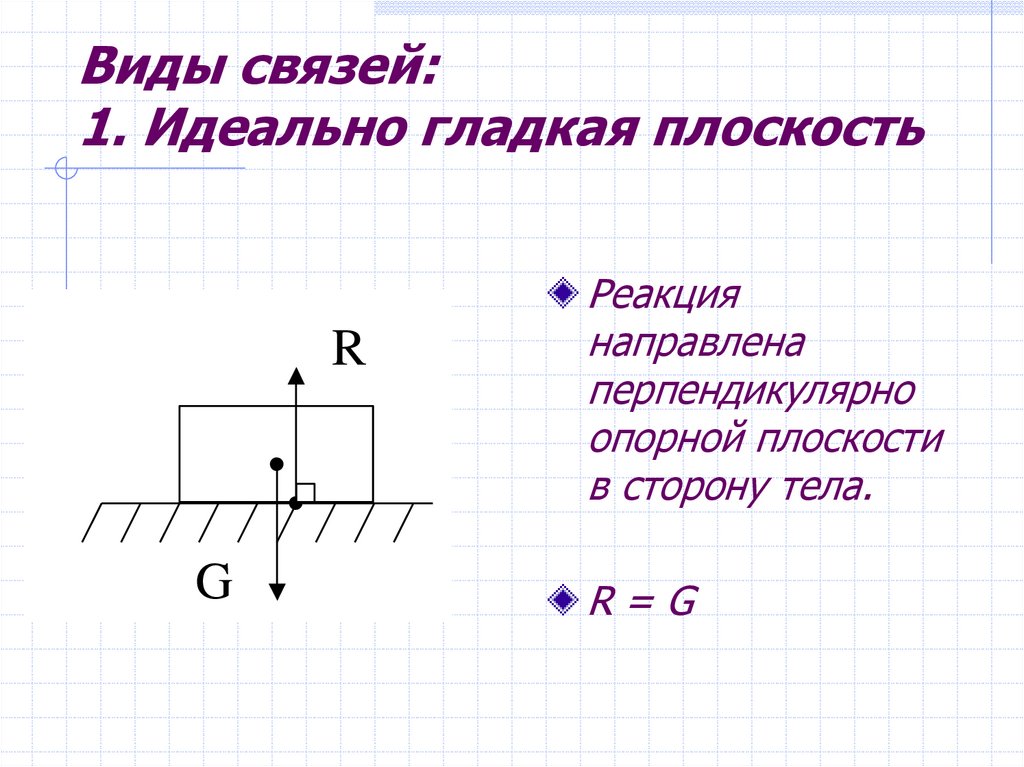
21.
Виды связей:1. Идеально гладкая плоскость
R
G
Реакция
направлена
перпендикулярно
опорной плоскости
в сторону тела.
R=G
22.
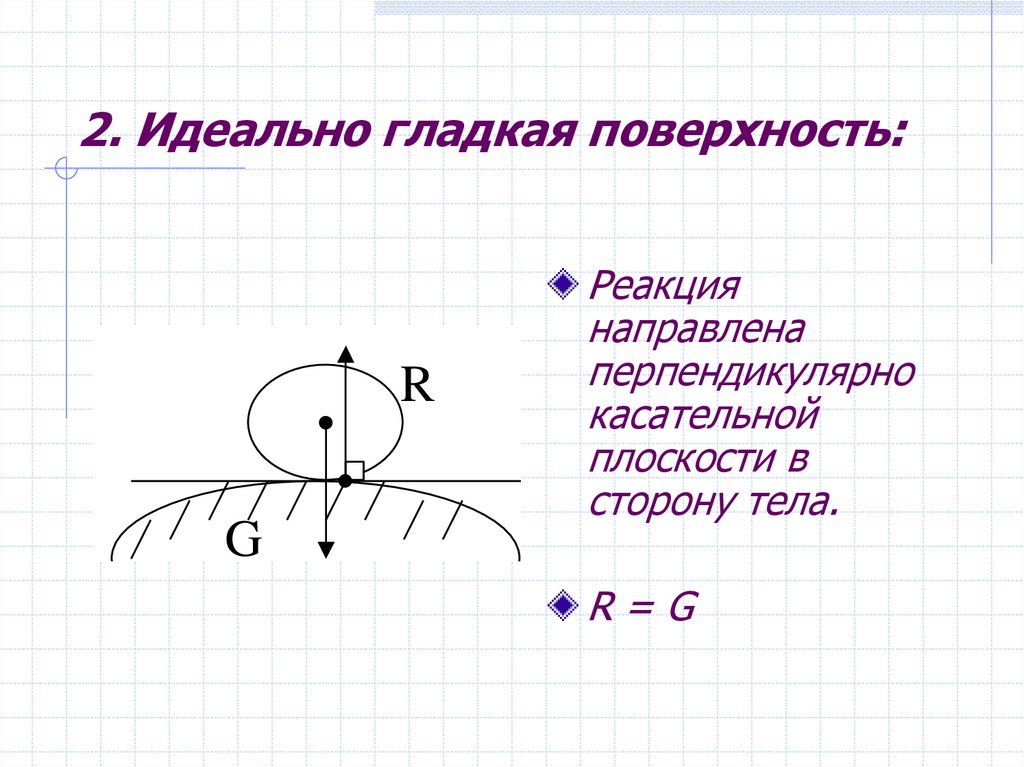
2. Идеально гладкая поверхность:R
G
Реакция
направлена
перпендикулярно
касательной
плоскости в
сторону тела.
R=G
23.
3. Опирание на реброR
G
Реакция
направлена
перпендикулярно
к поверхности
самого тела.
R
24.
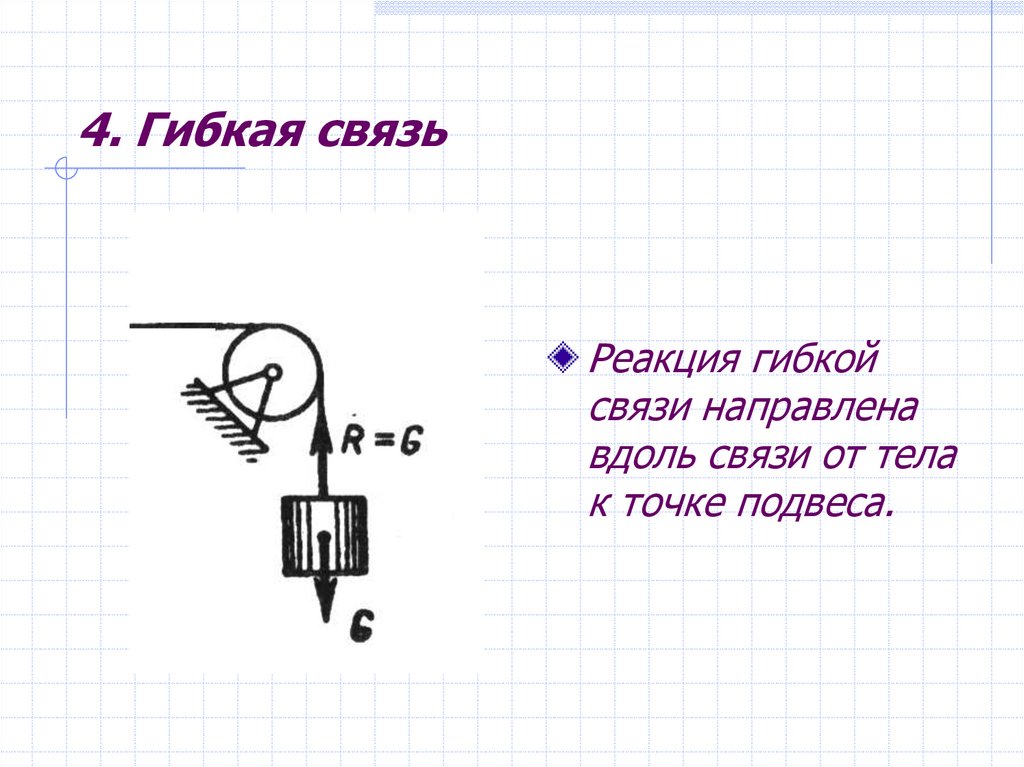
4. Гибкая связьРеакция гибкой
связи направлена
вдоль связи от тела
к точке подвеса.
25.
5. Шарнир –это подвижное соединениедвух тел, допускающее вращение вокруг
общей оси.
26.
Шарнирно неподвижнаяопора
Реакцию раскладывают
на две составляющие
по оси У и Х.
Шарнирно подвижная
опора
Реакция направлена
вертикально вверх,
перпендикулярно
плоскости.
27.
Идеально гладкий подпятникRz
Ry
Rx
Является
сочетанием
шарнира и опорной
плоскости, поэтому
его реакция
раскладывается на
три составляющие
по осям х, у и z.
28.
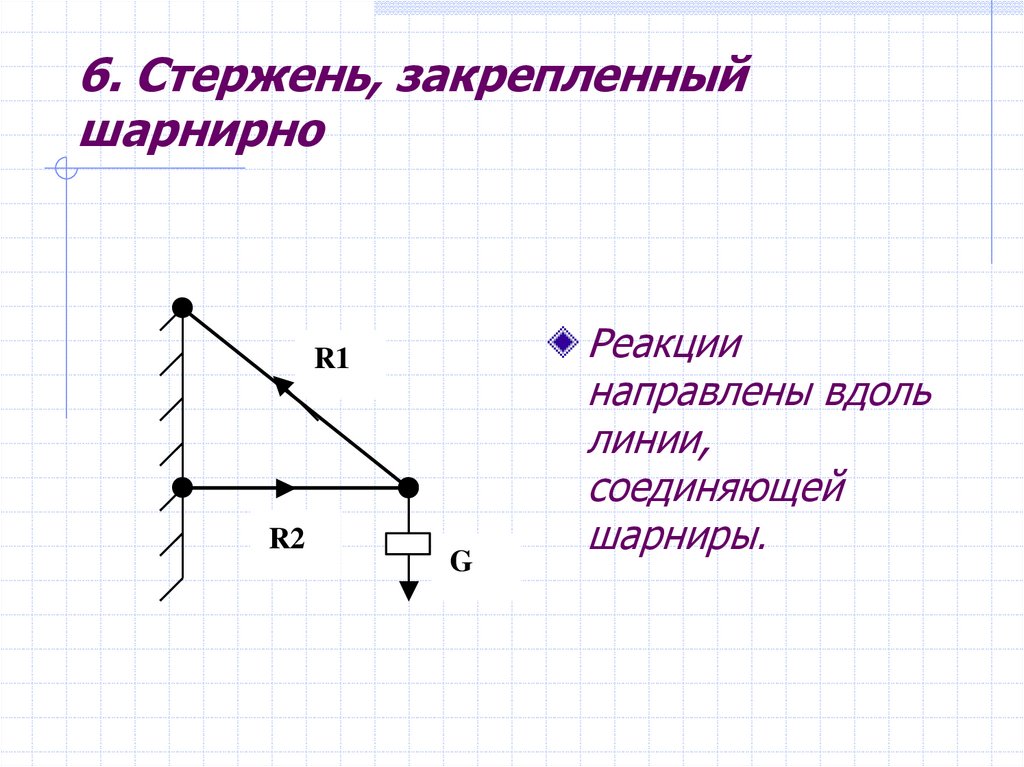
6. Стержень, закрепленныйшарнирно
R1
R2
G
Реакции
направлены вдоль
линии,
соединяющей
шарниры.
29.
7. Жесткая заделка- жестко защемляетконец балки, не допуская перемещений и вращений.
Реакция
раскладывается на
две составляющие
(по оси х и у) и
добавляется
реактивный
момент.