








")



")







 равнодействующей")






 = F∙а; М > 0")
:")
:")






")
")

")
")
")





 Физика
ФизикаПохожие презентации:


")




")


Основные понятия и аксиомы статики
1. Тема 1.1. Основные понятия и аксиомы статики
ТЕМА 1.1. ОСНОВНЫЕ ПОНЯТИЯИ АКСИОМЫ СТАТИКИ
Лекция 1
2.
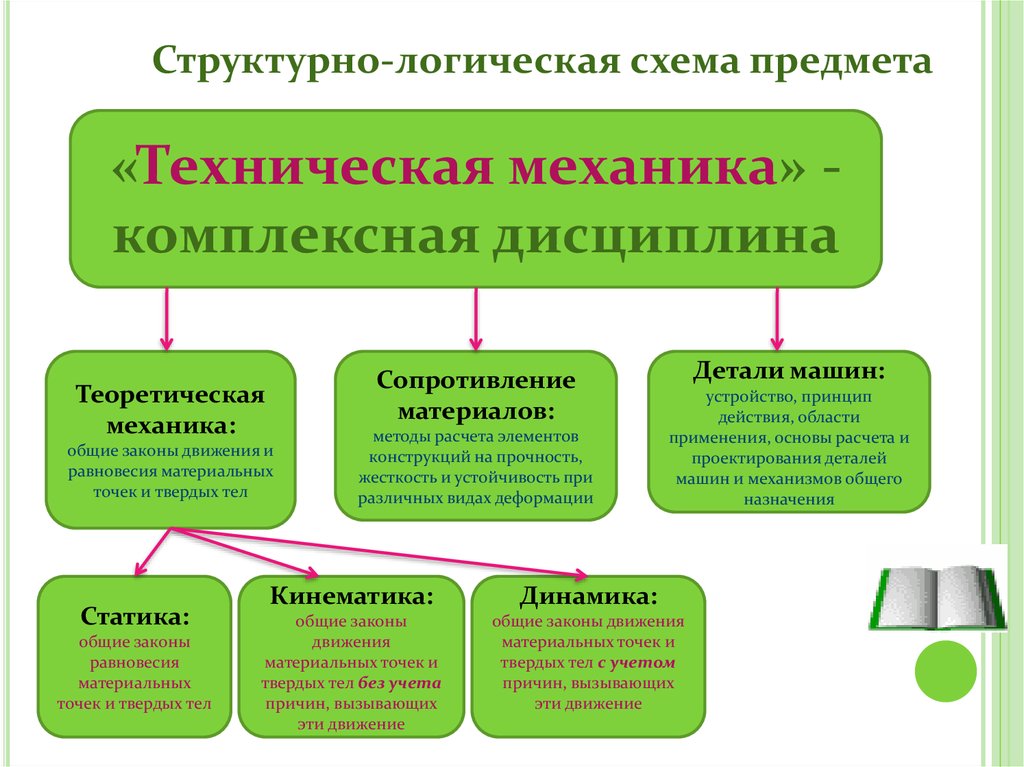
Структурно-логическая схема предмета«Техническая механика» комплексная дисциплина
Сопротивление
материалов:
Теоретическая
механика:
общие законы движения и
равновесия материальных
точек и твердых тел
Статика:
общие законы
равновесия
материальных
точек и твердых тел
методы расчета элементов
конструкций на прочность,
жесткость и устойчивость при
различных видах деформации
Детали машин:
устройство, принцип
действия, области
применения, основы расчета и
проектирования деталей
машин и механизмов общего
назначения
Кинематика:
Динамика:
общие законы
движения
материальных точек и
твердых тел без учета
причин, вызывающих
эти движение
общие законы движения
материальных точек и
твердых тел с учетом
причин, вызывающих
эти движение
3. Основные понятия статики
ОСНОВНЫЕ ПОНЯТИЯ СТАТИКИМатериальная точка – условно принятое
тело, размерами которого можно пренебречь
по сравнению с расстоянием, на котором оно
находится.
Абсолютно твердое тело– условно принятое
тело, которое не деформируется под
действием внешних сил.
все тела в механике
считаются
абсолютно
твердыми – не
разрушаются и не
деформируются!
4.
Равновесие – это покой по отношению квыбранной системе отсчета !
Механическое движение
относительно
Покой и движение – понятия относительные!
Для описания движения тела нужно указать,
по отношению к какому телу рассматривается
движение - это тело называют телом отсчета
Система координат, связанная с телом
отсчета, и часы для отсчета времени образуют
систему отсчета, позволяющую определять
положение движущегося тела в любой момент
времени
5. Положение тела в пространстве
ПОЛОЖЕНИЕ ТЕЛА В ПРОСТРАНСТВЕ.
А
0
Х1
А ( Х1,t)
Y1
.
А
0
Х1
A (Х1, Y1, t)
Z1
.
А
Х1
Y1
A(Х1, Y1, Z1, t)
6. Характеристики силы
ХАРАКТЕРИСТИКИ СИЛЫСила – это мера механического
взаимодействия материальных тел между
собой.
F
α
С
Л. д. с.
1. Величина (модуль)
2. Точка приложения (т.С)
3. Линия действия (л.д.с.)
4. Направление (угол α)
7.
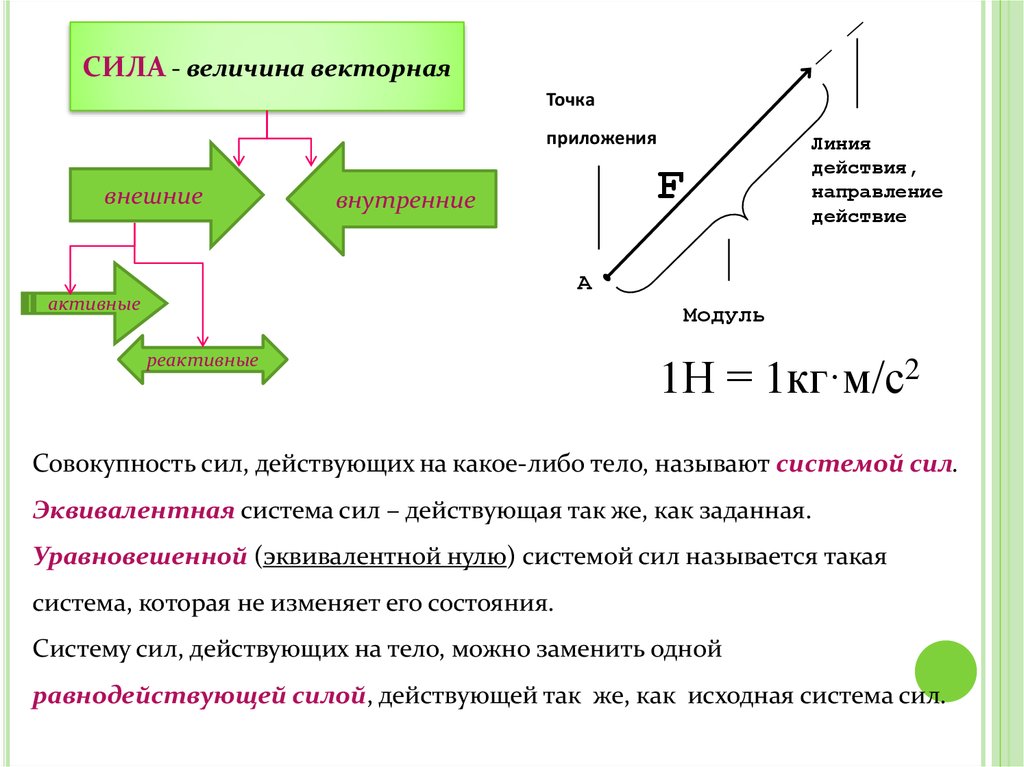
СИЛА - величина векторнаяТочка
приложения
внешние
F
внутренние
Линия
действия,
направление
действие
А
активные
Модуль
реактивные
1Н = 1кг·м/с2
Совокупность сил, действующих на какое-либо тело, называют системой сил.
Эквивалентная система сил – действующая так же, как заданная.
Уравновешенной (эквивалентной нулю) системой сил называется такая
система, которая не изменяет его состояния.
Систему сил, действующих на тело, можно заменить одной
равнодействующей силой, действующей так же, как исходная система сил.
8. Аксиомы статики
АКСИОМЫ СТАТИКИИсаак Ньютон (Isaac Newton) - английский физик,
математик, механик и астроном, один из
создателей классической физики. Автор
фундаментального труда "Математические начала
натуральной философии", в котором он изложил
закон всемирного тяготения и три закона механики,
ставшие основой классической механики.
И. Ньютон заложил фундамент теории цвета и
физической оптики, разработал дифференциальное и
интегральное исчисления, создал многие другие
математические и физические теории, не
потерявшие актуальность и в настоящее время.
Сложно переоценить вклад этого гения в развитие
естественных наук.
Как мы уже знаем, статика изучает условия, при которых тело или
материальная точка находятся в равновесии.
При решении задач статики принимают без доказательств
некоторые положения, подтвержденные опытным путем, которые
называют аксиомами статики. Основные аксиомы статики были
сформулированы английским ученым И. Ньютоном (1642-1727), и
поэтому названы его именем.
9. Первая аксиома
ПЕРВАЯ АКСИОМАПод действием уравновешенной системы сил
абсолютно твердое тело или материальная
точка находятся в равновесии или движутся
равномерно и прямолинейно (закон инерции)
10. Вторая аксиома
ВТОРАЯ АКСИОМАДве силы, равные по
модулю и направленные
по одной прямой в
разные стороны,
уравновешиваются
F1 F2
11. Третья аксиома
ТРЕТЬЯ АКСИОМАНе нарушая механического
состояния тела, можно
добавить или убрать
уравновешенную систему сил
(принцип отбрасывания
системы сил, эквивалентной
нулю)
F4
F1 F5
F3
F5
F1
F2
12. Четвертая аксиома (правило параллелограмма сил)
ЧЕТВЕРТАЯ АКСИОМА (ПРАВИЛО ПАРАЛЛЕЛОГРАММА СИЛ)Равнодействующая двух сил, приложенных в одной точке,
приложена в той точке и является диагональю
параллелограмма, построенного на этих силах как
сторонах.
Вместо параллелограмма можно построить треугольник
сил: силы вычерчивают одну за другой в любом порядке;
равнодействующая двух сил соединяет начало первой
силы с концом второй.
F
5
A
F
α
α
F2
Σ
13. Пятая аксиома
ПЯТАЯ АКСИОМАПри взаимодействии тел всякому
действию соответствует равное и
противоположно направленное
противодействие.
Силы действующие и
противодействующие всегда
приложены к разным телам,
поэтому они не
уравновешиваются.
Силы, с которыми два тела
действуют друг на друга, всегда
равны по модулю и направлены
вдоль одной прямой в разные
стороны.
F2
F1
14. Следствие из второй и третьей аксиом
СЛЕДСТВИЕ ИЗ ВТОРОЙ И ТРЕТЬЕЙ АКСИОМСилу, действующую на твердое тело, можно
перемещать вдоль линии ее действия .
F1
В
F
A
F
F1 F
15. Самостоятельная работа обучающихся —
САМОСТОЯТЕЛЬНАЯ РАБОТА ОБУЧАЮЩИХСЯ —подготовка электронной презентации на тему
«Великие ученые-механики»
16. Тема 1.2. Плоская система сходящихся сил (ПССС)
ТЕМА 1.2. ПЛОСКАЯ СИСТЕМАСХОДЯЩИХСЯ СИЛ (ПССС)
Лекция 2
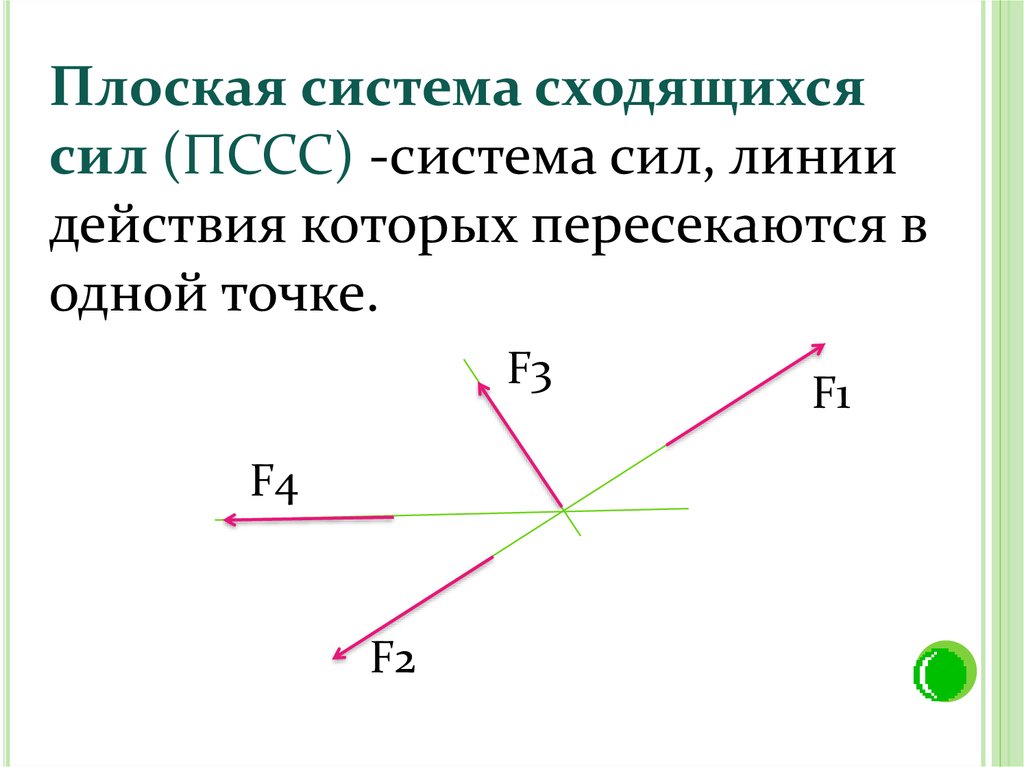
17.
Плоская система сходящихсясил (ПССС) -система сил, линии
действия которых пересекаются в
одной точке.
F3
F4
F2
F1
18. Геометрический способ определения равнодействующей ПССС
ГЕОМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯРАВНОДЕЙСТВУЮЩЕЙ ПССС
F3
F1
F4
F4
F2
F2
FΣ
F1
F3
19. Условие равновесия ПССС
УСЛОВИЕ РАВНОВЕСИЯ ПСССЕсли ПССС находится
в равновесии, то
многоугольник сил этой
системы должен быть
замкнут.
20. Пример
ПРИМЕРТеорема синусов
a
b
c
sin sin sin
30
0
А
F
R1
R2
sin 750 sin 600 sin 450
45 0
F=10 кН
F
R1
sin 750 sin 600
F sin 600
R1
sin 750
F
R2
sin 750 sin 450
F sin 450
R2
sin 750
21. Проекция силы на ось
ПРОЕКЦИЯ СИЛЫ НА ОСЬF
α
0
x
Fx F cos
Величина проекции силы на ось равна произведению
модуля силы на косинус угла между вектором силы и
положительным направлением оси.
22. проекция имеет знак: положительный при одинаковом направлении вектора силы и оси и отрицательный при направлении в сторону
ПРОЕКЦИЯ ИМЕЕТ ЗНАК: ПОЛОЖИТЕЛЬНЫЙ ПРИ ОДИНАКОВОМНАПРАВЛЕНИИ ВЕКТОРА СИЛЫ И ОСИ И ОТРИЦАТЕЛЬНЫЙ
ПРИ НАПРАВЛЕНИИ В СТОРОНУ ОТРИЦАТЕЛЬНОЙ ПОЛУОСИ
23. Проекция силы на две взаимно перпендикулярные оси
ПРОЕКЦИЯ СИЛЫ НА ДВЕ ВЗАИМНОПЕРПЕНДИКУЛЯРНЫЕ ОСИ
24. Аналитический способ определения равнодействующей ПССС
АНАЛИТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯРАВНОДЕЙСТВУЮЩЕЙ ПССС
25. Модуль (величина) равнодействующей
МОДУЛЬ (ВЕЛИЧИНА) РАВНОДЕЙСТВУЮЩЕЙНаправление вектора равнодействующей можно
определить по величинам и знакам косинусов углов,
образуемых равнодействующей с осями координат
26. Условия равновесия в аналитической форме
УСЛОВИЯРАВНОВЕСИЯ В АНАЛИТИЧЕСКОЙ ФОРМЕ
Исходя из того, что равнодействующая равна нулю
Плоская система сходящихся сил находится в
равновесии, если алгебраическая сумма проекций
всех сил системы на любую ось равна нулю.
27. Система уравнений равновесия ПССС:
СИСТЕМА УРАВНЕНИЙ РАВНОВЕСИЯ ПССС:В задачах координатные оси выбирают так,
чтобы решение было наиболее простым.
Желательно, чтобы хотя бы одна неизвестная
сила совпадала с осью координат.
28. Пример 1. Определить величины и знаки проекций
ПРИМЕР 1. ОПРЕДЕЛИТЬ ВЕЛИЧИНЫ И ЗНАКИПРОЕКЦИЙ
ПРИМЕР 2. ОПРЕДЕЛИТЬ
ВЕЛИЧИНУ И НАПРАВЛЕНИЕ
РАВНОДЕЙСТВУЮЩЕЙ ПЛОСКОЙ
СИСТЕМЫ СХОДЯЩИХСЯ СИЛ
АНАЛИТИЧЕСКИМ СПОСОБОМ.
29. Самостоятельная работа обучающихся —
САМОСТОЯТЕЛЬНАЯ РАБОТА ОБУЧАЮЩИХСЯ —выполнение расчетно-графической работы по
теме «Плоская система сходящихся сил»
30. Тема 1.3. Пара сил и момент силы относительно точки
ТЕМА 1.3. ПАРА СИЛ ИМОМЕНТ СИЛЫ
ОТНОСИТЕЛЬНО ТОЧКИ
Лекция 3
31. Пара сил -
ПАРА СИЛ -система двух
сил, равных по
модулю, параллельных и
направленных в
противоположные стороны.
пара сил вызывает вращение
тела и ее действие на тело
оценивается моментом.
силы, входящие в пару, не
уравновешиваются. Их
действие на тело не может
быть заменено одной силой
(равнодействующей).
32. M(F;F/ ) = F∙а; М > 0
/M(F;F )
= F∙а; М > 0
Момент
пары сил
численно равен
произведению модуля
силы на расстояние между
линиями действия сил
(плечо пары)
33. Свойства пар (без доказательств):
СВОЙСТВА ПАР(БЕЗ ДОКАЗАТЕЛЬСТВ):
Пару сил
можно
перемещать в плоскости
ее действия.
Эквивалентность пар.
Две пары, моменты
которых равны,
эквивалентны.
34. Свойства пар (без доказательств):
СВОЙСТВА ПАР(БЕЗ ДОКАЗАТЕЛЬСТВ):
Сложение пар сил.
Систему пар сил можно
заменить
равнодействующей парой.
+
М∑=F1a1 +F2a2+F3a3+…+Fnan;
М∑ =∑mk
Равновесие пар. Для
равновесия пар
необходимо и достаточно,
чтобы алгебраическая
сумма моментов пар
системы равнялась нулю
-
М∑=0;
∑mk=0
35. Момент силы относительно точки
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИСила, не проходящая через точку
крепления тела, вызывает
вращение тела относительно
точки, поэтому действие такой
силы на тело оценивается
моментом.
Момент силы относительно
точки численно равен
произведению модуля силы на
расстояние от точки до линий
действия силы. Перпендикуляр,
опущенный из точки на линию
действия силы, называется
плечом силы.
mо(F ) = F∙а, Н∙м
Момент силы
относительно точки
равен нулю, если
линия действия силы
проходит через точку,
т. к. в этом случае
расстояние от точки до
силы равно нулю.
36. Примеры решения задач
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧПример 1. Дана пара сил |F1 | = |F2| = 42 кН; плечо 2 м.
Заменить заданную пару сил эквивалентной парой с
плечом 0,7 м.
Пример 2. Дана система пар сил.
Определить момент результирующей
пары.
Пример 3. Рассчитать сумму моментов
сил относительно точки О.
37. Самостоятельная работа обучающихся —
САМОСТОЯТЕЛЬНАЯ РАБОТА ОБУЧАЮЩИХСЯ —решение задач по теме «Пара сил и момент силы
относительно точки»
38.
РЕАКЦИИ СВЯЗЕЙОсновные понятия:
Свободное тело - тело, перемещение
которого ничем не ограничено.
Несвободное тело – тело, перемещение
которого ограничено другими телами.
Связь – тело, ограничивающее
перемещение других тел.
Реакция связи – сила, с которой связь
действует на тела.
39.
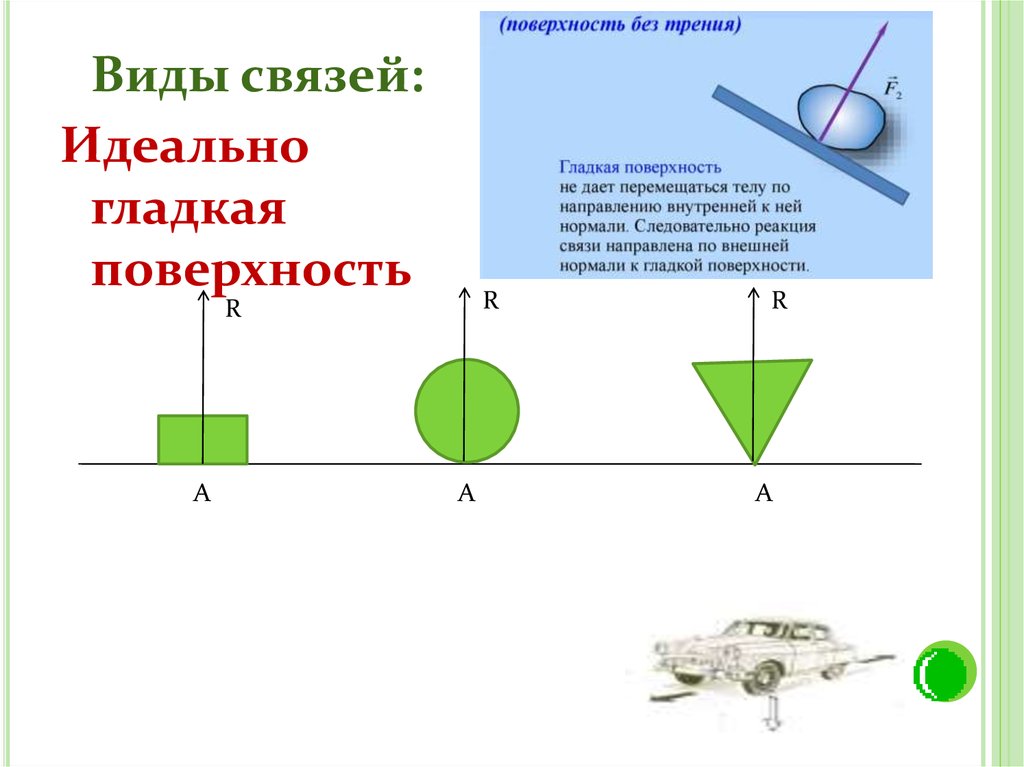
Виды связей:Идеально
гладкая
поверхность
R
R
А
А
R
А
40.
Виды связей:Точечная опора
RА
RВ
А
В
41.
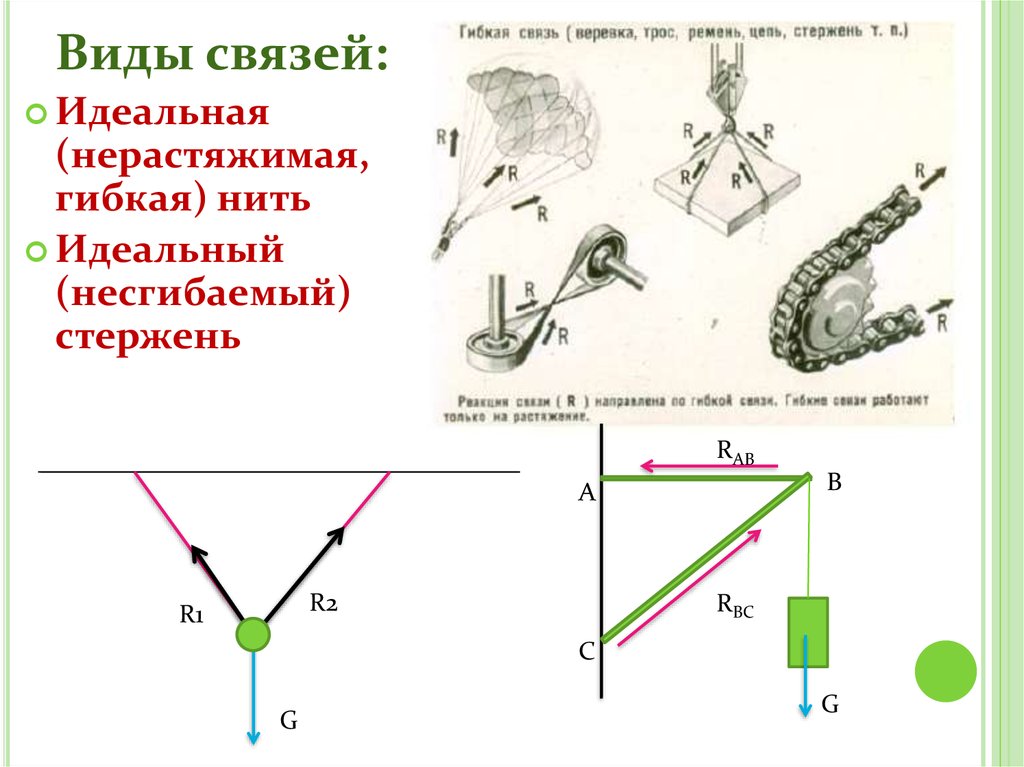
Виды связей:Идеальная
(нерастяжимая,
гибкая) нить
Идеальный
(несгибаемый)
стержень
RAB
B
A
R2
R1
RBC
C
G
G
42. Шарнирная опора
ШАРНИРНАЯ ОПОРАШарнирно-подвижная опора
Цилиндрический шарнир
y
F
RAy
A
α
43. Шарнирная опора
ШАРНИРНАЯ ОПОРАШарнирно-неподвижная опора
Шаровой шарнир
y
F
RAy
A
α
RBy
RBx
B
x
44. Защемление (жесткая заделка)
ЗАЩЕМЛЕНИЕ (ЖЕСТКАЯ ЗАДЕЛКА)45. Тема 1.4. Плоская система произвольно расположенных сил (ПСПРС)
ТЕМА 1.4. ПЛОСКАЯ СИСТЕМАПРОИЗВОЛЬНО
РАСПОЛОЖЕННЫХ СИЛ (ПСПРС)
Лекция 4
46. Теорема Пуансо о параллельном переносе сил
ТЕОРЕМА ПУАНСО О ПАРАЛЛЕЛЬНОМ ПЕРЕНОСЕ СИЛСилу можно перенести параллельно линии ее
действия, при этом нужно добавить пару сил с
моментом, равным произведению модуля силы на
расстояние, на которое перенесена сила
47. Приведение к точке плоской системы произвольно расположенных сил (ПСПРС)
ПРИВЕДЕНИЕ К ТОЧКЕ ПЛОСКОЙ СИСТЕМЫПРОИЗВОЛЬНО РАСПОЛОЖЕННЫХ СИЛ (ПСПРС)
О – точка приведения.
m1, m2, m3, m4 – присоединенные пары.
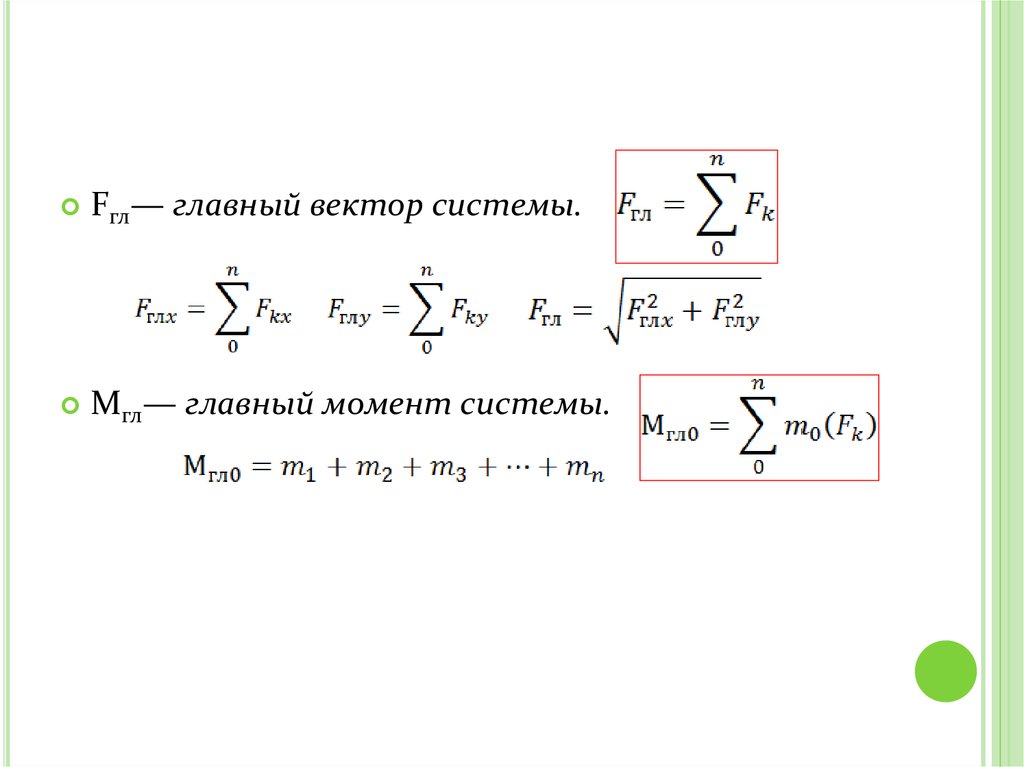
Fгл— главный вектор системы.
Мгл— главный момент системы.
48.
Fгл— главный вектор системы.Мгл— главный момент системы.
49. Условие равновесия произвольной плоской системы сил (ПСПРС)
УСЛОВИЕ РАВНОВЕСИЯ ПРОИЗВОЛЬНОЙ ПЛОСКОЙСИСТЕМЫ СИЛ (ПСПРС)
где А и В — разные точки приведения
Для того чтобы твердое тело под действием
произвольной плоской системы сил находилось в
равновесии, необходимо и достаточно, чтобы
алгебраическая сумма проекций всех сил системы на
любую ось равнялась нулю и алгебраическая сумма
моментов всех сил системы относительно любой
точки в плоскости действия сил равнялась нулю.
50. Условие равновесия произвольной плоской системы сил (ПСПРС)
УСЛОВИЕ РАВНОВЕСИЯ ПРОИЗВОЛЬНОЙ ПЛОСКОЙСИСТЕМЫ СИЛ (ПСПРС)
Первая форма
уравнений равновесия
Вторая форма
уравнений равновесия
Третья форма
уравнений равновесия
51. Тема 1.4. Балочные системы
ТЕМА 1.4. БАЛОЧНЫЕСИСТЕМЫ
Лекция 5
52. Виды нагрузок
ВИДЫ НАГРУЗОКВиды
q
-
l/2
нагрузок по
способу приложения
сосредоточенные
распределенные
Q
Равнодействующая
распределенной
нагрузки
q — интенсивность
нагрузки, кН/м;
l — длина стержня, м
53. Разновидности балочных систем
РАЗНОВИДНОСТИ БАЛОЧНЫХ СИСТЕМБалка
– конструктивная деталь в
виде прямого бруса, закрепленная
на опорах и изгибаемая
приложенными к ней силами.
54. Разновидности балочных систем
РАЗНОВИДНОСТИ БАЛОЧНЫХ СИСТЕМy
Балка с жесткой заделкой
(защемлением)
RAy
Заделку заменяют двумя
составляющими силы RAx и RAy и
парой с моментом mR.
A
RAx
x
mR
Каждое
уравнение имеет
одну
неизвестную
величину
проверка
55. Разновидности балочных систем
РАЗНОВИДНОСТИ БАЛОЧНЫХ СИСТЕМДвухопорная
балка
y
RAy
F
α
RBy
B
A
Каждое
уравнение имеет
одну
неизвестную
величину
RBx
проверка
x