

































 Физика
ФизикаПохожие презентации:










Автоматика и управление. Тема 3. Временные характеристики ЛСС. Лекция 3. Типовые входные сигналы
1.
Автоматика и управлениеТема 3. Временные
характеристики ЛСС
Лекция 3. Типовые входные сигналы: единичный импульс и
единичная ступенчатая функция. Весовая функция одномерной ЛСС:
определение; интеграл Дюамеля; аналитическое представление; общие
свойства. Переходная функция одномерной ЛСС: определение;
аналитическое представление; общие свойства. Весовые и переходные
функции элементарных динамических звеньев.
2.
3.1. Типовые входные сигналы: единичный импульс иединичная ступенчатая функция
Помимо передаточной функции, динамические свойства ЛСС
описываются временными и частотными характеристиками.
Временной характеристикой называется изменяющийся во
времени выходной сигнал АС при воздействии на неё
изменяющимся во времени по определенному закону
входным сигналом.
Существует две временные характеристики АС: переходная и
весовая функции, которые являются реакциями ЛСС на
соответствующие типовые входные сигналы - единичную
ступенчатую и дельта-функцию.
Для частотных характеристик типовым является
гармонический входной сигнал.
3.
3.1.1. Единичная ступенчатая функцияЕдиничной ступенчатой функцией называется функция,
определяемая равенством:
0 , t 0
1( t )
1, t 0
x
1
L [ 1( t )] 1( t )e pt dt
1(t)
0
0
t
1 pt
1 1
L[1( t )] e dt e
0 .
p
p p
0
0
pt
4.
3.1.2. Единичный импульс (дельта-функция)0 ,
( t ) 1 / ,
0 ,
1/
t 0
0 t
t .
t
( )d 1 ( t ) .
t
0
0
Единичной дельта-функцией (t)
называют предел:
1
1
( t ) lim ( t ) ,
0
видно из графика
0 ( )d 1( t ) 1 ( t ) при 0
0
t
На практике функцией (t) аппроксимируют кратковременные
сигналы большой мощности
5.
,(t )
0 ,
t 0,
t 0.
(t)
Теорема Лопита́ля (также правило Бернулли —
Лопиталя) — метод нахождения пределов
функций, раскрывающий неопределённости
вида 0/0 и / . Обосновывающая метод
теорема утверждает, что при некоторых
условиях предел отношения функций равен
пределу отношения их производных.
0
t
1 pt
L[ (t )] L[lim
(
t
)]
lim
L
[
(
t
)
]
lim
(
t
)
e
dt
lim
e dt
0
0
0
0
0
0
применим
p
1 pt
1 e
pe p
lim
e lim
правило lim
1.
0
0
0
p
p
p
0
Лопиталя
pt
дельта-функцию можно определить как такую функцию
времени, изображение которой равно единице.
6.
Свойства дельта-функции:1.Фильтрующее свойство:
t
f ( ) ( T )d f (T ). где 0 T t.
0
f(t)
(t)
f(t)
Если дельта-функция ( -T) входит под
интеграл какой-либо функции в качестве
множителя, то результат интегрирования
равен значению подынтегральной функции в
точке расположения дельта-функции
2. Связь (t) с 1(t).
Хотя функции 1(t) и (t) не являются
дифференцируемыми в обычном
понимании этого слова, но в автоматике на
эти функции распространено понятие
производных:
( -T)
T
d 1( t )
(t )
,
dt
t
t 0.
7.
3.2. Весовая функция одномерной ЛСС: определение;интеграл Дюамеля; аналитическое представление;
общие свойства.
3.2.1. Определение весовой функции
Для одномерной ЛСС с одним входом весовой функцией
g(t) называется реакция системы на единичную дельтафункцию при нулевых начальных условиях:
g(t) = y(t), если x(t) = (t)
для технически реализуемых систем справедливо:
g(t) = 0 для t 0,
так как реакция системы не может опережать входной
сигнал по времени
Весовая g(t) и передаточная Ф(p) функции ЛСС
однозначно связаны равенствами:
L[g(t)] =G(p)= Ф(p) или g(t) = L-1[Ф(p)]
8.
3.2.2. Интеграл ДюамеляВесовая функция g(t) однозначно определяет выходной
сигнал ЛСС y(t) для любого входного сигнала x(t) по равенству
вида:
t
t
y( t ) x ( )g( t )d x ( t )g( )d
0
интеграл Дюамеля
0
Значение выходного сигнала y(t) в любой текущий
момент времени t зависит от всех значений входного
сигнала x( ) на отрезке времени от 0 до t и от значений
весовой функции, определенных для данного отрезка
времени, на интервале от 0 до t.
Значение весовой функции g(t- ) в момент времени t-
определяет коэффициент (вес) с которым значение входного
сигнала x( ) в момент времени влияет на значение
выходного сигнала y(t) в момент времени t
9.
Применение интеграла Дюамеляосновано на принципе
суперпозиции для линейных систем
в которых отклик её на сумму
нескольких воздействий равен
сумме откликов от каждого из
слагаемых сигналов, сдвинутых во
времени.
10.
Интеграл Дюамеля устанавливает непосредственную связьмежду входным x(t) и выходным y(t) сигналами и потому
является интегральной формой оператора любой одномерной
ЛСС
1. В том случае, если система включается в произвольный
момент времени не равный нулю, т.е. t0 0, то интеграл
Дюамеля примет вид:
t
y( t ) x ( )g( t )d
или
t0
t t0
y( t ) g( t ) x ( t ) d .
0
2. Для установившегося режима соответствующего условию
t0=- , т.е. система включена бесконечно давно по отношению
к рассматриваемому времени, интеграл Дюамеля принимает
вид:
t
y( t ) x ( )g( t )d или
y( t ) g( t ) x ( t ) d .
0
11.
3.2.3. Переход от изображения весовой функциик ее оригиналу
Аналитическое представление весовой функции ЛСС можно
получить на основании интеграла Дюамеля, при известном
операторе системы (достаточно сложно), либо путем перехода
от изображения весовой функции G(p)=Ф(p) к ее оригиналу
g(t). Такой переход можно осуществить тремя методами:
1. Прямым, т.е. применяя операцию обратного
преобразования Лапласа
g (t ) L 1 G ( p ) L 1 Ф( p )
1
j
pt
G
(
p
)
e
dp .
2 j j
2. По таблицам соответствия изображений и оригиналов для
табличных значений функций G(p)
3. Применением теоремы разложения.
12.
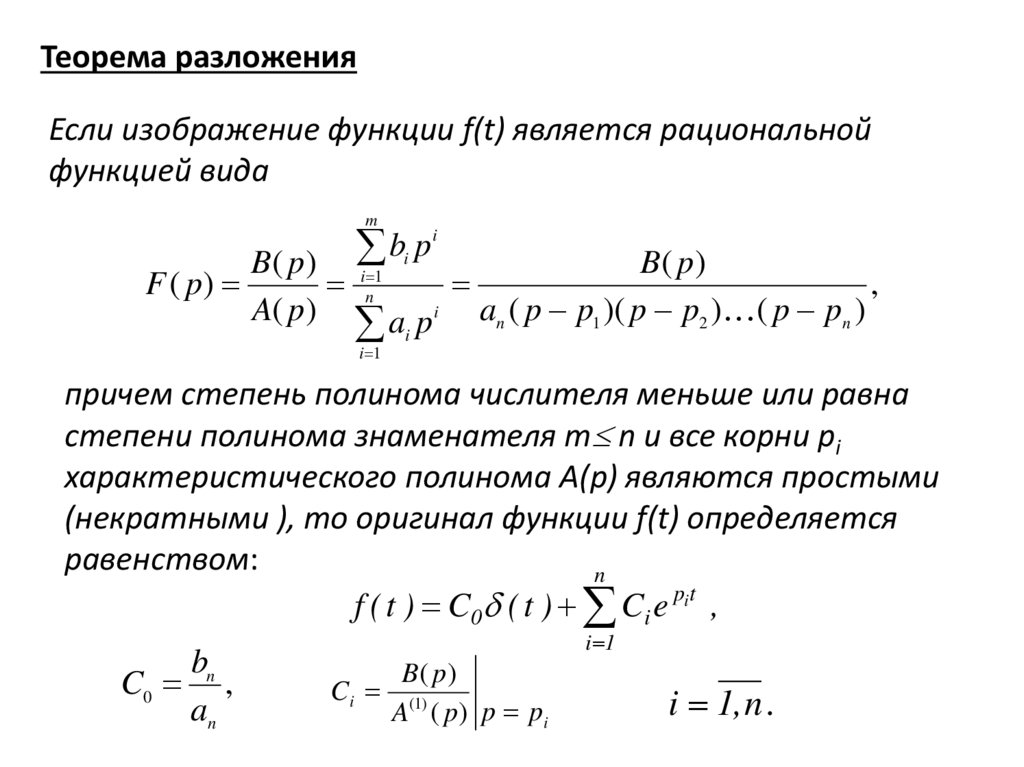
Теорема разложенияЕсли изображение функции f(t) является рациональной
функцией вида
m
F ( p)
i
b
p
i
B( p) i 1
B( p)
n
,
A( p)
a p i an ( p p1 )( p p2 ) ( p pn )
i 1
i
причем степень полинома числителя меньше или равна
степени полинома знаменателя m n и все корни pi
характеристического полинома А(p) являются простыми
(некратными ), то оригинал функции f(t) определяется
равенством:
n
f ( t ) C0 ( t ) Ci e pit ,
C0
bn
,
an
i 1
Ci
B( p)
A(1) ( p ) p pi
i 1, n .
13.
Положим, что F(p) = Ф(p), тогда f(t) = g(t), следовательно:n
g(t)=C0 (t)+ Сi e i
pt
,для t 0,
i 1
для t 0.
g(t)=0,
1. Для t > 0 весовая функция ЛСС является линейной
комбинацией единичного импульса (t) и экспонент,
показателями которых являются полюса p передаточной функции
Ф(p).
2. Коэффициенты Ci для i = 0 , n , определяются параметрами
системы, причем:
bn
а) если m = n, то bn 0 и C0 = 0
an
б) если m < n, то bn= 0 и C0 = bn 0
an
14.
Если характеристическое уравнение АС содержит кратные корни,то получение оригинала весовой функции g(t) по теореме
разложения не правомерно. В этом случае необходимо
разложить передаточную функцию АС на простые дроби и
выполнить переход к оригиналу по таблицам.
k
mi
Ф( p ) C0
i 1 j 1
Cij
( p pi )
j
,
15.
3.2.4. Общие свойства весовых функций ЛCCПо передаточной функции ЛСС можно определить
начальное и конечное значения ее весовой функции.
Начальным значением g(+0) весовой функции g(t)
называется ее предел справа при t стремящемся к нулю:
g( 0 ) lim g( t ) .
t 0
Величина g(+0) определяется с помощью теоремы о
начальном значении.
Теорема о начальном значении.
Для кусочно–непрерывной функции x(t), имеющей
изображение Х(p), справедливо
lim
( x) lim
pX ( p ) .
t 0
p
равенство
Начальное значение весовой функции АС может принимать
три различных значения:
bn 1
,
an
, 0.
16.
Конечным значением g( ) весовой функции g(t) называетсяпредел, к которому она стремится при бесконечном
увеличении времени:
g( ) lim g( t ) .
t
Величина g( ) определяется с помощью теоремы о конечном
значении.
Теорема о конечном значении. x( ) lim x( t ) lim p X ( p ) .
t
p 0
у всех ЛСС, для которых выполняется условие Re[pi]<0, i= 1, n ,
конечное значение весовой функции равно нулю
g
g
g
m=n
bn 1
аn
t
m=n-1
m=n-2
t
t
17.
3.3. Переходная функция одномерной ЛСС:определение, аналитическое представление, общие
свойства
3.3.1. Определение переходной функции
Для одномерной ЛСС с одним входом переходной функцией
h(t) называется реакция системы на единичную
ступенчатую функцию при нулевых начальных условиях:
h(t) = y(t), если x(t) = 1(t)
h(t)=0 для t≤0, т.к., реакция системы не может опережать
входной сигнал по времени
Для ЛС АС переходная h(t) и передаточная Ф(р) функции
однозначно связаны равенствами:
Ф( p )
L [ h( t )]
H( p )
p
Ф( p )
1
h( t ) L 1
L
[ H ( p )].
p
18.
Действительно, для ЛСС справедливовыражение: Y(p) = X(p)Ф(p).
Пусть x(t) = 1(t), тогда y(t) = h(t),
а следовательно:
Y(p) = L[h(t)] = H(p).
Известно, что
1
X(p) = L[1(t)] =
p
следовательно,
1
Y(p) = X(p)Ф(p) =
p
Ф(p) = H(p)
19.
Переходная и весовая функции ЛС АС однозначно связаныравенствами
t
h( t ) g ( )d
0
dh( t )
g( t ).
dt
Переходная функция ЛСС равна интегралу от весовой функции
и, так же как и весовая функция, являясь динамической
характеристикой, определяет оператор АС
20.
3.3.2. Аналитическое представление переходной функцииАналитическое представление переходной функции можно
получить на основании интеграла Дюамеля либо путем
перехода от изображения переходной функции H(p) = Ф(p)/p к
ее оригиналу h(t). Такой переход выполняется либо по
таблицам, либо применением теоремы разложения
В результате применения теоремы разложения для
технически реализуемых ЛСС (m < n) с передаточной функцией
рационального вида Ф(p) =B(p)/A(p) в случае, если все полюса
pi передаточной функции являются простыми (некратными),
переходная функция определяется равенствами:
h(t ) C~ 1(t ) n C~ e p t , t 0,
0
i
i
1
h(t ) 0, t 0.
i
в ~
B( p)
Ci
~
C0 Ф(0) 0 , Ci
a0
pA(1) ( p) p pi pi
21.
1 Для t>0 h(t) является линейной комбинацией постоянной~
составляющей C 0 и экспонент, показателями которых
являются полюса передаточной функции pi
~
~
2. Коэффициенты C 0 и C i определяются параметрами
передаточной функции ЛСС аi, вi, i=0,1,2,….
22.
3.3.3. Общие свойства переходных функцийПо передаточной функции ЛСС можно определить начальное и
конечное значения переходной функции данной системы.
Начальным значением h(0+) переходной функции h(t)
называется ее предел справа при t стремящемся к нулю:
h(0 ) lim h(t).
t 0
На основании теоремы о начальном значении, величина
h(0+) определяется равенством:
Ф( p )
h(0 ) lim
pH(p) lim
p
lim
Ф( p )
p
p
p
p
Для Ф(p) рационального вида, равенство принимает вид:
m
вi p i
m
в
p
h( 0 ) lim i n0
m n
p
p
a p i an p
i
i 0
23.
Следствия:вm p m
вn
.
1. Если m=n то h(0+)=
n
p a
an p
2. Если m n-1
n
в n 1 p n 1
0.
то h(0+)=
n
p
an p
в зависимости от соотношения степеней полиномов числителя и
знаменателя, начальное значение переходной функции ЛСС может
принимать два значения: вn/an и 0
Конечным значением h( ) переходной функции h(t)
называется предел, к которому она стремится при
неограниченном увеличении времени:
h( ) = lim h(t)
t
На основании теоремы о конечном значении находим:
h( ) =
Ф( p )
lim
pH
(
p
)
lim
p
lim Ф( p )
p 0
p 0
p 0
p
=Ф(0)=
в0
a0
= const
24.
hh
h( )
h( )
в0
h( ) =
a0
вn
an
0
0
t
m=n
m<n
t
25.
3.4. Весовые и переходные функции элементарныхдинамических звеньев
Усилительное звено
Оператор усилительного звена имеет вид:
a0 y(t) = в0 x(t) или y(t) =Kx(t)
K = в0 /а0 - коэффициент усиления звена
Y( p )
=K
W(p) =
X( p )
y(t) = g(t) =K (t)
y(t) = h(t) =K1(t)
h(t)
g(t)
K
K (t)
0
0
t,c
t,c
26.
Интегрирующее звеноa1y(1)(t) = в0 x(t)
t
y(1)(t) =Kx(t)
либо y(t) = K x ( )d
0
K
W(p)=
p
K = в0 /а0 - коэффициент усиления звена
h(1)(t) = K 1(t)
t
h(t) = K 1 ( )d = Kt
0
g(1)(t) = K (t)
t
g(t) = K ( )d = K 1(t)
0
h(t)
g(t)
g(+0)=K ,
h(+0)=0,
h( )= .
0
g( )=K .
K
tga=K
t,c
0
t,c
27.
Апериодическое звеноa1 y(1)(t)+а0 y(t) = в0 x(t)
Ty(1)(t)+y(t) = Kx(t)
K = в0 /а0 - коэффициент усиления; T = а1 /а0 - постоянная времени звена
K
,
W(p) =
Tp 1
G
.
H(p) = K
p( p a )
h
1
K
.
H(p) = W(p)
p p( Tp 1 )
а = 1/T
t=T
g
h(t) = K(1-e-t/T)
K - Tt
g(t)
e
T
K
h
t1
K/Т
h( )
t2
lim h(t ) lim K (1 e t / T ) K .
t
t
t=T
h
t,c
t1
t2
28.
htga =
t
h
tga
t t t1
t
h
tga
.
t1
K T
e ,
T
h h( ) h( t1
t
t
1
1
) K K ( 1 e T ) Ke T .
Ke t
t
T.
K t / T
e
T
1/ T
1
29.
Инерционное звено второго порядкаa2y(2)(t)+а1y(1)(t)+а0y(t) = в0 x(t)
T2y(2)(t)+2T y(1)(t)+y(t)=Kx(t)
K = в0 /а0 - коэффициент усиления звена
T = a 2 / a0
- постоянная времени
= а1 /2 a0 a 2 - коэффициент демпфирования
K
W(p) = 2 2
T p 2 Tp 1
K 2
,
W(p) = 2
2
p 2 p
= 1/T - собственная частота колебаний звена
В(p) = K 2,
P1 = (- + 2 1 )
А(p) = p2+2 p+ 2
p2= (- - 2 1 )
30.
Звено второго порядка (0< <1)h
t
t
e T
1
h( t ) K 1
sin
1 2 t
T
1 2
arctg
1 2
g
t
g( t )
K
T 1 2
e
t
1
T sin
1 2t
T
31.
Звено второго порядка ( =1)K
K
W(p) = 2 2
T p 2 Tp 1 (Tp 1) 2
h
t
t
h( t ) K 1 1 e T
T
t
g
t
Kt
g( t ) 2 e T
T
t
32.
Звено второго порядка ( >1) когда > 1 - корни p1,p2 действительныеK
K
W(p) = 2 2
T p 2 Tp 1
(T1 p 1)(T2 1)
t
t
T1
T2
T1
h( t ) K 1
e
e T2
T1 T2
T1 T2
h
t
t
t
K T1
T2
g( t )
e
e
T1 T2
g
t
33.
Звено второго порядка ( =0)K
K
2 2
W(p) = 2 2
T p 2 Tp 1 T p 1
h
t
h( t ) K 1 sin
T 2
K
t
g
t
K
t
g ( t ) sin
T
T
34.
Звено постоянного запаздыванияa0 y(t) = в0 x(t- )
y(t) = Kx(t- )
K = в0 /а0 - коэффициент усиления звена, - постоянная
запаздывания
W(p) = Ke-p
h( t ) K 1( t ) ,
h( t ) 0 , t ;
t ,
g ( t ) K ( t ) ,
g( t ) 0 , t .
t ,
h
h
K
0
t
0
t
35.
Дифференцирующие и форсирующие звеньяa0 y(t) = в1 x(1)(t)
y(t) = Kx(1)(t)
K = в1 /а0 - коэффициент усиления звена
h(t) = K 1(1)(t) = K (t)
W(p) = Kp
g(t) = K (1)(t)
Форсирующее звено первого порядка
a0 y(t) = в1 x(1)(t)+в0 x(t)
y(t) = KTx(1)(t)+Kx(t) = K[Tx(1)(t)+x(t)]
W(p) = K(Tp+1)
h(t) = KT 1(1)(t)+K 1(t) = KT (t)+K 1(t)
g(t) = KT (1)(t)+K (t)
36.
Форсирующее звено второго порядкаа0 y(t) = в2 x(2)(t)+в1 x(1)(t)+в0 x(t)
y(t) = KT2x(2)(t)+2KT x(1)(t)+Kx(t) = K[T2x(2)(t)+2T x(1)(t)+x(t)]
W(p) = K(T2p2+2T p+1)
h(t) = KT 21(2)(t)+2KT 1(t)+K 1(t) = KT 2 (1)(t)+2KT (t)+K 1(t)
g(t) = KT 2 (2) (t)+2KT (1)(t)+K (t)