


 Военное дело
Военное делоПохожие презентации:




")

 - основа системы радиолокационной разведки ВКС")


")
Общая характеристика радиолокационной системы РТВ
1.
Раздел 2. Средства радиолокации радиотехнических войск ПВОТЕМА № 2.1. Общая характеристика радиолокационной системы РТВ
Лекция 11 Принципы построения радиолокационной
системы РТВ
Доцент кафедры тактики и вооружения РТВ
Юрас Сергей Арсеньевич
2.
Вопросы лекции1. Принципы построения наземной системы радиолокационной разведки
воздушного пространства.
2. Классификация наземных радиолокационных средств разведки
воздушного пространства.
2
3.
Учебная литература:• Основы
построения
радиолокационных
станций
радиотехнических войск: учебник /В.Н. Тяпкин, А.Н. Фомин,
Е.Н.Гарин [и др.]; под общей ред. В.Н.Тяпкина.- М. : ИНФРА-М;
Красноярск: Сиб. федер. ун-т, 2018.
• А.Н.Лысый, С.А.Юрас. Двухкоординатная РЛС П-18. – Минск:
ВА РБ 2011.
• Трёхкоординатная РЛС 55Ж6./ Под редакцией В.И. Кардакова. –
Минск: Военная академия Республики Беларусь, 2005.
• А.В.
Павловский,
В.Н.
Скобей.
Двухкоординатная
радиолокационная станция П-37Р3. Минск, 2007.
3
4.
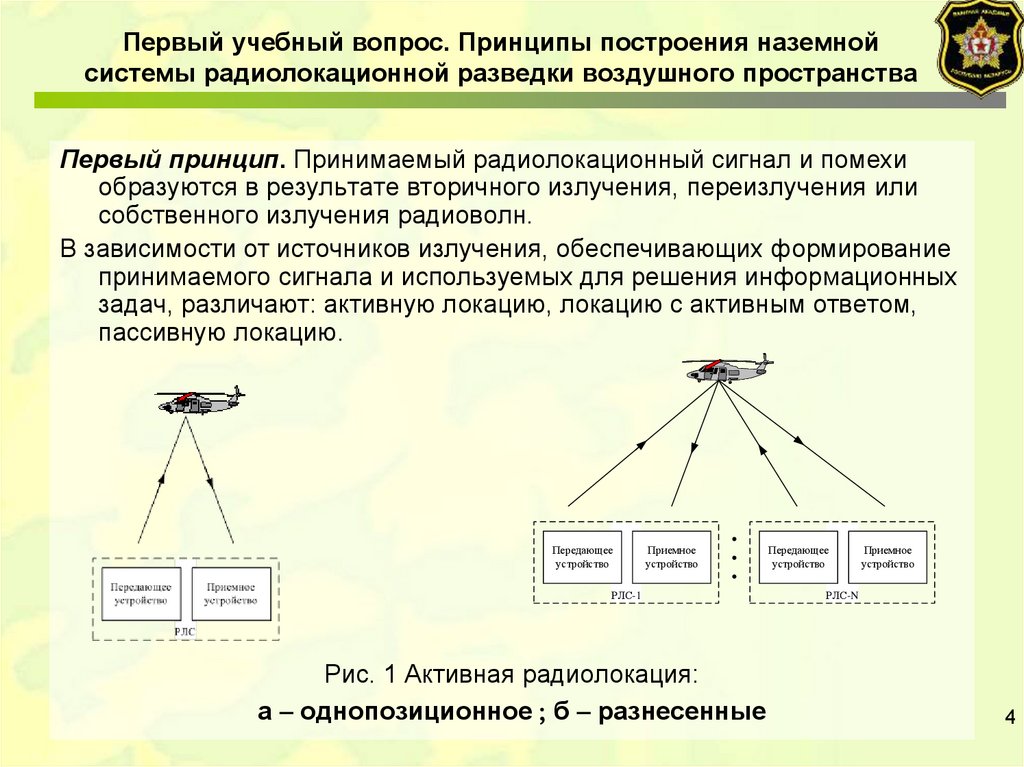
Первый учебный вопрос. Принципы построения наземнойсистемы радиолокационной разведки воздушного пространства
Первый принцип. Принимаемый радиолокационный сигнал и помехи
образуются в результате вторичного излучения, переизлучения или
собственного излучения радиоволн.
В зависимости от источников излучения, обеспечивающих формирование
принимаемого сигнала и используемых для решения информационных
задач, различают: активную локацию, локацию с активным ответом,
пассивную локацию.
Передающее
устройство
Приемное
устройство
РЛС-1
Рис. 1 Активная радиолокация:
а однопозиционное б разнесенные
Передающее
устройство
Приемное
устройство
РЛС-N
4
5. Рис. 2. Локация с активным ответом Рис. 3. Пассивная локация
Приемноеустройство
РЛС
Рис. 2. Локация с активным ответом
Рис. 3. Пассивная локация
5
6.
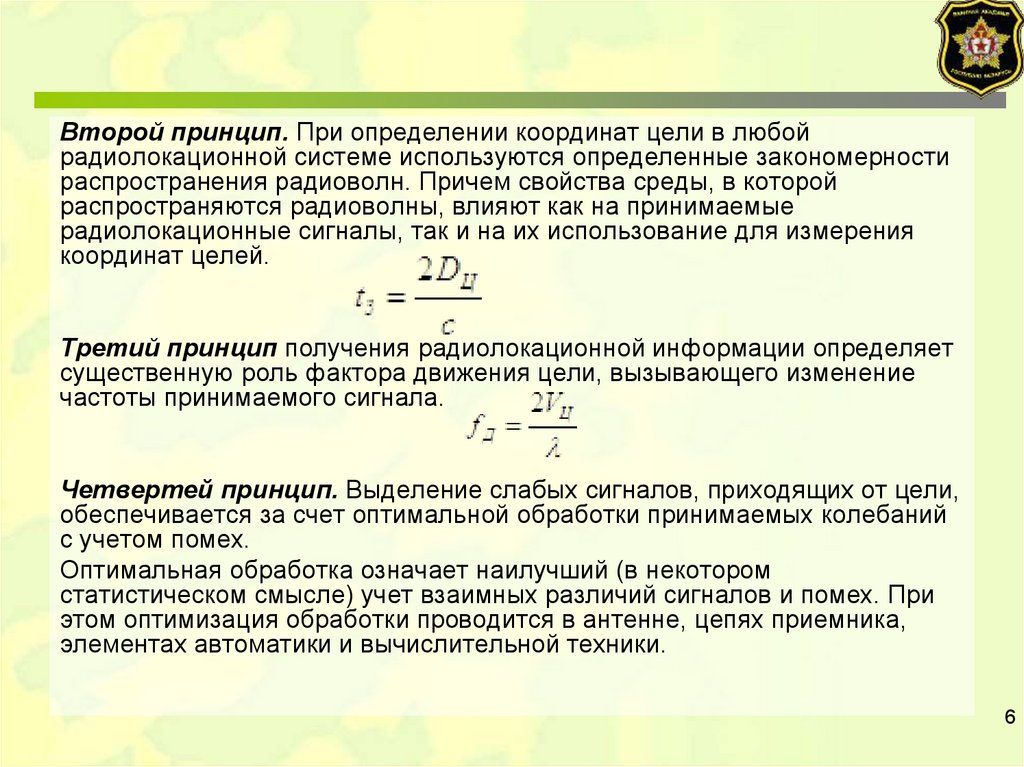
Второй принцип. При определении координат цели в любойрадиолокационной системе используются определенные закономерности
распространения радиоволн. Причем свойства среды, в которой
распространяются радиоволны, влияют как на принимаемые
радиолокационные сигналы, так и на их использование для измерения
координат целей.
Третий принцип получения радиолокационной информации определяет
существенную роль фактора движения цели, вызывающего изменение
частоты принимаемого сигнала.
Четвертей принцип. Выделение слабых сигналов, приходящих от цели,
обеспечивается за счет оптимальной обработки принимаемых колебаний
с учетом помех.
Оптимальная обработка означает наилучший (в некотором
статистическом смысле) учет взаимных различий сигналов и помех. При
этом оптимизация обработки проводится в антенне, цепях приемника,
элементах автоматики и вычислительной техники.
6
7.
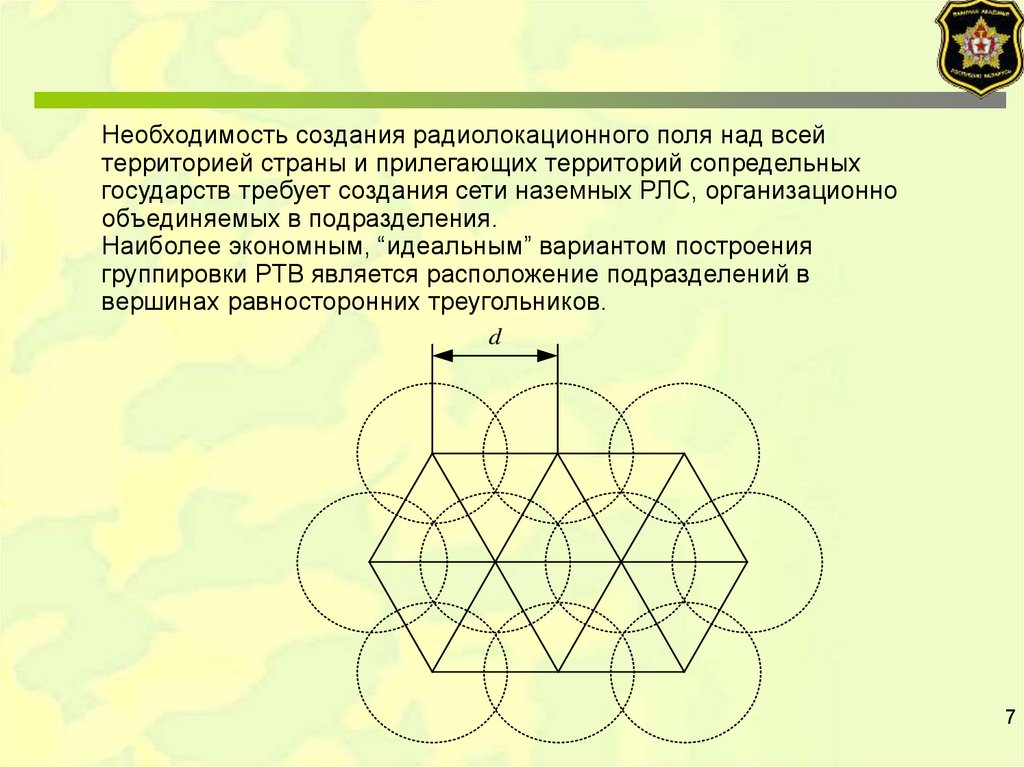
Необходимость создания радиолокационного поля над всейтерриторией страны и прилегающих территорий сопредельных
государств требует создания сети наземных РЛС, организационно
объединяемых в подразделения.
Наиболее экономным, “идеальным” вариантом построения
группировки РТВ является расположение подразделений в
вершинах равносторонних треугольников.
d
7
8.
Практически расстояние выбирают гораздо меньшим,обеспечивая повышение кратности (коэффициента)
перекрытия, определяемое количеством подразделений
группировки, информационные зоны которых совпадают в
заданной точке воздушного пространства.
Перекрытие обеспечивает:
- повышение помехоустойчивости группировки, особенно при
создании поля РЛС работающих в различных частотных
диапазонах;
- создание сплошного дежурного поля частью РЛС (для экономии
ресурса и скрытия полной структуры группировки);
- повышение живучести и боеготовности группировки РТВ (при
выходе из строя отдельных РЛС или выполнения на них
технического обслуживания);
- возможность перехода к реальным, т.е. неидеальным сетям
подразделений без существенных потерь поля;
- повышение результирующей вероятности обнаружения цели.
8
9.
1112
11
12
21
11
12
11
РЛС 1
1
22
12
2
21
21
22
22
2
1
12
11
21
До обработки
22
После обработки
22
РЛС 2
21
Этапы обработки РЛИ
9
10.
2. Классификация наземных радиолокационных средствразведки воздушного пространства
Наиболее полную характеристику РЛС дает классификация, в основу
которой положены как тактические, так и технические признаки в
соответствии с целевым назначением.
К тактическим признакам относятся:
- целевое назначение РЛС;
- количество измеряемых координат;
- подвижность и др.
Наиболее существенными техническими признаками являются:
- метод дальнометрии или вид зондирующих сигналов;
- диапазон рабочих волн (частот);
- число независимых радиолокационных каналов.
10
11.
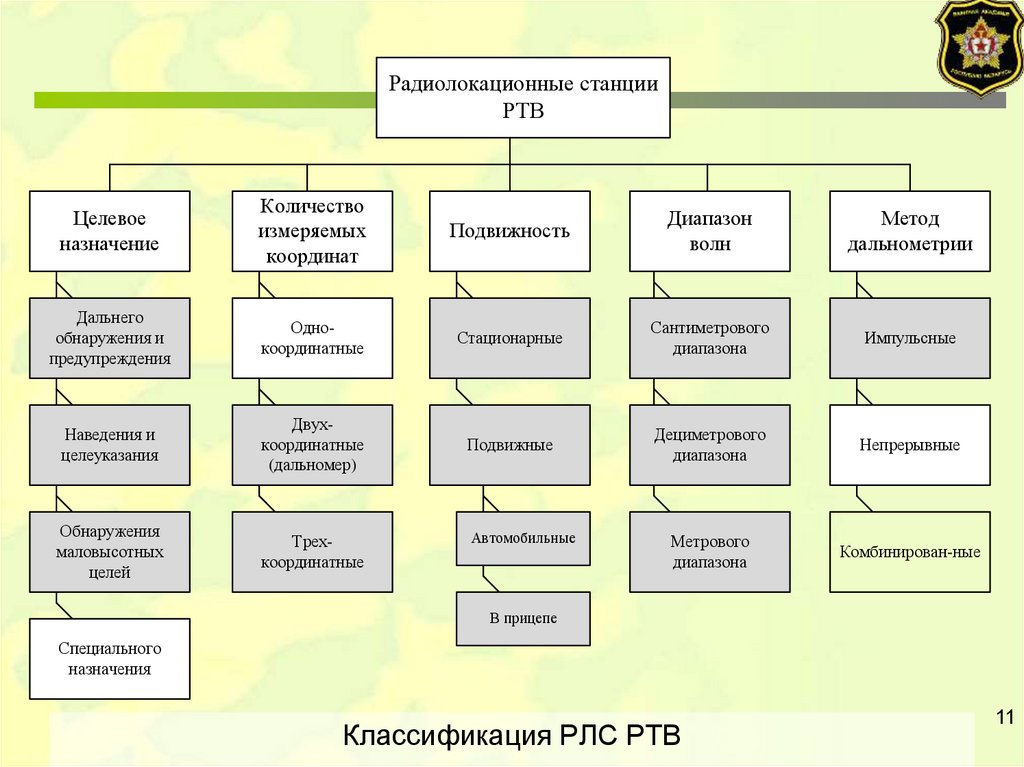
Радиолокационные станцииРТВ
Целевое
назначение
Количество
измеряемых
координат
Подвижность
Диапазон
волн
Метод
дальнометрии
Дальнего
обнаружения и
предупреждения
Однокоординатные
Стационарные
Сантиметрового
диапазона
Импульсные
Наведения и
целеуказания
Двухкоординатные
(дальномер)
Подвижные
Дециметрового
диапазона
Непрерывные
Обнаружения
маловысотных
целей
Трехкоординатные
Метрового
диапазона
Комбинирован-ные
Автомобильные
В прицепе
Специального
назначения
Классификация РЛС РТВ
11
12.
РЛС дальнего обнаружения и предупреждения (РЛС дежурного режима)предназначены для ведения радиолокационной разведки воздушного
противника на максимальном удалении от обороняемых объектов,
предупреждения о нем и целеуказания средствам обнаружения с меньшей
дальностью действия. Обладая наибольшими возможностями обнаружения
по дальности и высоте, такие РЛС имеют относительно низкие точностные
характеристики.
РЛС наведения и целеуказания (РЛС боевого режима) являются основным
информационным звеном в системе наведения истребителей на
воздушные цели. Поскольку для решения задачи наведения необходима
информация о пространственном положении цели, такие РЛС должны
измерять три координаты: азимут, дальность и высоту. Кроме того, они
должны обладать точностными характеристиками, обеспечивающими
успешное решение подобной задачи. Точностные характеристики должны
обеспечивать беспоисковый захват целей станцией наведения ракет.
12
13.
РЛС обнаружения МВЦ предназначены для разведки воздушногопротивника, действующего на малых высотах. Отличительной
особенностью такой РЛС является то, что диаграмма направленности
(ДН) ее антенны, с целью реализации предельных возможностей по
обнаружению МВЦ, максимально прижимается к земле. РЛС МВЦ
работают в сантиметровом или в дециметровом диапазоне волн и иметь
специальную аппаратуру подавления интенсивных отражений от земной
поверхности. РЛС обнаружения МВЦ сравнительно маломощны, а потому
более компактны и мобильны.
К РЛС специального назначения относятся РЛС с повышенными
точностными характеристиками, РЛС закрытия мертвых воронок, РЛС с
активным ответом, пассивные РЛС и др.
13
14.
В зависимости от числа независимых радиолокационных каналов РЛСподразделяют на одноканальные и многоканальные. Последние, в свою очередь, могут
быть:
- частотно-многоканальными;
- пространственно-многоканальными;
- пространственно-частотно-многоканальными.
В частотно-многоканальных РЛС используется несколько приемопередатчиков,
работающих на разных частотах, но в пределах одной и той же ДН антенны. Цель
получается одновременно на нескольких частотах, а выходные сигналы каналов
обрабатываются совместно.
В пространственно-многоканальных РЛС антенна имеет парциальную диаграмму
направленности. Сигналы излучаются и принимаются на одной частоте. При этом
передатчик может быть общим для всех парциальных каналов. Число приемных
каналов должно соответствовать количеству парциальных лепестков.
В пространственно-частотно-многоканальных РЛС в пределах каждого
парциального лепестка сигналы излучаются и принимаются на своей частоте.
Достоинством многоканальных РЛС является повышенная помехозащищенность и
большая дальность действия, которая обеспечивается увеличением суммарной
излучаемой мощности при допустимых значениях пиковой мощности в каждом из
каналов. К недостаткам относится большая сложность (прежде всего антенных
систем).
14