








 Военное дело
Военное делоПохожие презентации:







")


Основы построения СРЛ РТВ. Общие принципы построения подсистемы активной радиолокации РТВ
1.
Институт военного обученияВоенный учебный центр
Кафедра «Автоматизированных систем управления
РТВ ВКС»
Дисциплина
«Основы построения АСУ РТВ ВКС»
Лекция
Виды зондирующих сигналов, применяемых в
РЛС РТВ
Тема №4 «Основы построения СРЛ РТВ. Общие принципы построения
подсистемы активной радиолокации РТВ»
Занятие №2 «Виды зондирующих сигналов, применяемых в РЛС РТВ»
2.
Сибирский федеральный университетУчебные вопросы:
1. Виды
зондирующих
сигналов,
применяемых в РЛС РТВ.
2. Влияние структуры и параметров
зондирующего сигнала на тактикотехнические характеристики РЛС.
2
3.
Сибирский федеральный университетЛитература.
1. Ботов М.И. Вяхирев В.А.Теоретические основы РЛ
систем РТВ. Военая кафедра СФУ,2007стр153-169.
2. Теоретические основы радиолокации. Под редакцией
Ширмана Я.Д. Учебное пособие для вузов. М., Изд-во
«Советское радио». 1970. с.20-54
3
4.
Сибирский федеральный университетВопрос№1.
Виды зондирующих сигналов,
применяемых в РЛС РТВ
4
5.
Сибирский федеральный университетПод зондирующим радиолокационным сигналом (ЗС)
понимают радиоволну, излученную передающей
антенной РЛС в пространство с заданными
параметрами.
В общем случае ЗС может быть представлен в виде:
x(t) = X(t)·cоs(2 fot + (t) + o),
(1)
где X(t), (t) - законы амплитудной и фазовой
модуляции;
fo - несущая частота;
o - начальная фаза.
5
6.
Сибирский федеральный университетВыбор зондирующего сигнала является одной из
важнейших задач при проектировании РЛС любого назначения,
так как его форма и параметры в значительной мере
определяют
тактико-технические
характеристики
РЛС
(дальность обнаружения цели, защищенность от активных и
пассивных помех, потенциальную точность измерения
дальности, разрешающую способность по дальности и др.
В радиолокационных станциях применяются различные
виды зондирующих сигналов:
-непрерывные немодулированные;
-непрерывные амплитудно-модулированные;
-непрерывные частотно-модулированные;
-импульсные.
Выбор того или иного вида зондирующего сигнала зависит
от характера решаемых РЛС задач и условий ее
функционирования. В РЛС РТВ, как, впрочем, и в большинстве
РЛС иного назначения, применяются импульсные зондирующие
6
сигналы.
7.
Сибирский федеральный университетПо своей структуре зондирующие радиоимпульсы могут
быть:
-одиночными и групповыми (или последовательностями
радиоимпульсов);
-когерентными и некогерентными;
-простыми и сложными.
Одиночные импульсы применяются достаточно редко.
Обнаружение цели и измерение ее координат обычно
осуществляется на основе анализа группы отраженных от цели
радиоимпульсов - "пачки", содержащей М радиоимпульсов.
Радиоимпульсы называются некогерентными, если
начальная фаза высокочастотных колебаний от импульса к
импульсу является неизвестной величиной.
Радиоимпульсы называются когерентными (от лат.
"cohaerentia" - сцепление, связь), если начальная фаза
колебаний каждого радиоимпульса одинаковая или от
импульса к импульсу изменяется по определенному закону.
7
8.
Сибирский федеральный университетПростыми (или узкополосными) называются радиоимпульсы, у
которых произведение ширины спектра Пи и длительность импульса и
(база сигнала) составляет величину порядка единицы:
Пи. и 1 .
Сложным (или широкополосным) импульсным сигналом
называется сигнал , если его база
n = Пи. и >> 1 .
Достоинством узкополосных сигналов является относительная
простота их формирования и оптимальной обработки. Формирование
таких импульсов обеспечивается путем достаточно простой
импульсной модуляции генератора СВЧ, а квазиоптимальным
фильтром является УПЧ приемника с согласованной шириной полосы
пропускания ( fупч):
1,37
2 fупч
и
Такой квазиоптимальный фильтр по сравнению с оптимальным
дает проигрыш в отношении "сигнал/шум" по мощности всего в 1,2
раза.
8
9.
Сибирский федеральный университетОсновными параметрами зондирующих сигналов
являются:
1. Длина волны -
2. Импульсная мощность - PИ
3. Частота (период) повторения импульсов - FП ( TП )
4. Средняя за период повторения мощность- PС
5. Длительность импульса - u
6. Несущая частота колебаний- f о
7. Ширина спектра сигнала - П
u
9
10.
Сибирский федеральный университетНесущая частота fo может быть различной в зависимости
от рабочего диапазона волн РЛС. Вся радиолокационная
техника основана на использовании радиоволн УКВ
диапазона, имеющих длину волны меньше 10 метров.
Важной частотной характеристикой сигналов является их
спектр.
-.
Энергетический спектр зондирующего сигнала можно
определить как распределение вдоль оси частот его энергии.
Область частот, в пределах которой сосредоточена
основная часть всей энергии сигнала, называется шириной
спектра Δfc(Пи). Обычно ширина спектра определяется полосой
частот, где сосредоточено ~90% энергии сигнала. Например,
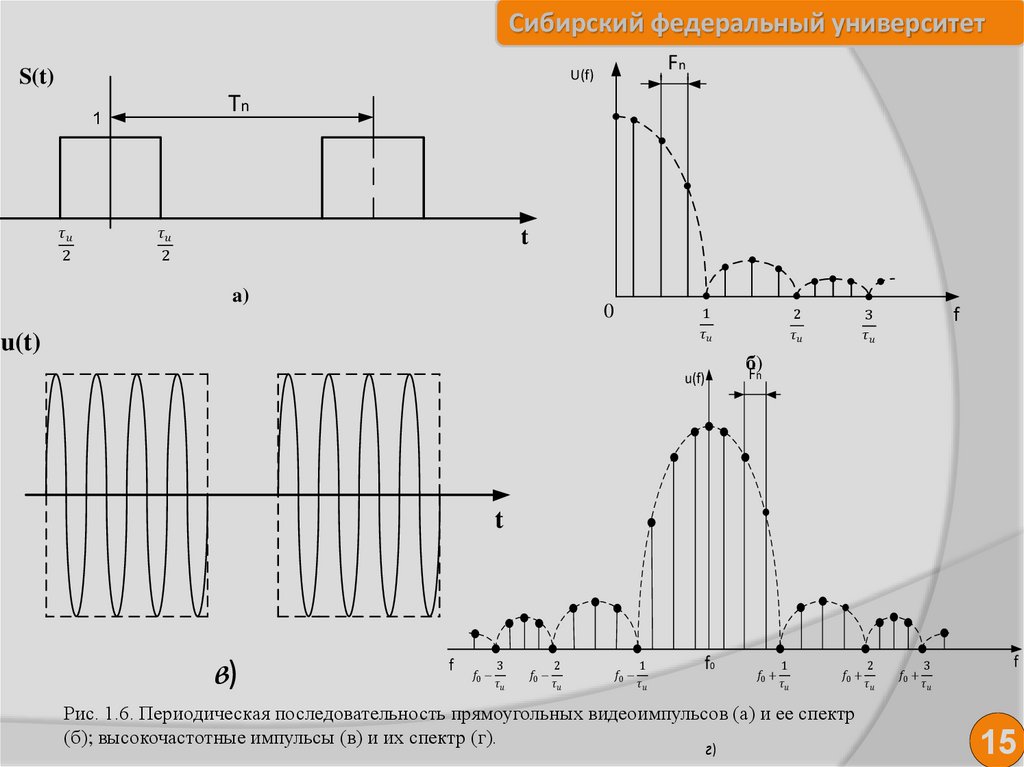
ширина спектра прямоугольного видеоимпульса равна
Пи = 1/τи (Δfc =1/τи)
10
11.
Сибирский федеральный университетВиды сигналов, применяемых в РЛС РТВ.
U(t)
Видеоимпульс
Uо
t1
1
t
Рис.Одиночный видеоимпульс и его АЧС.
11
12.
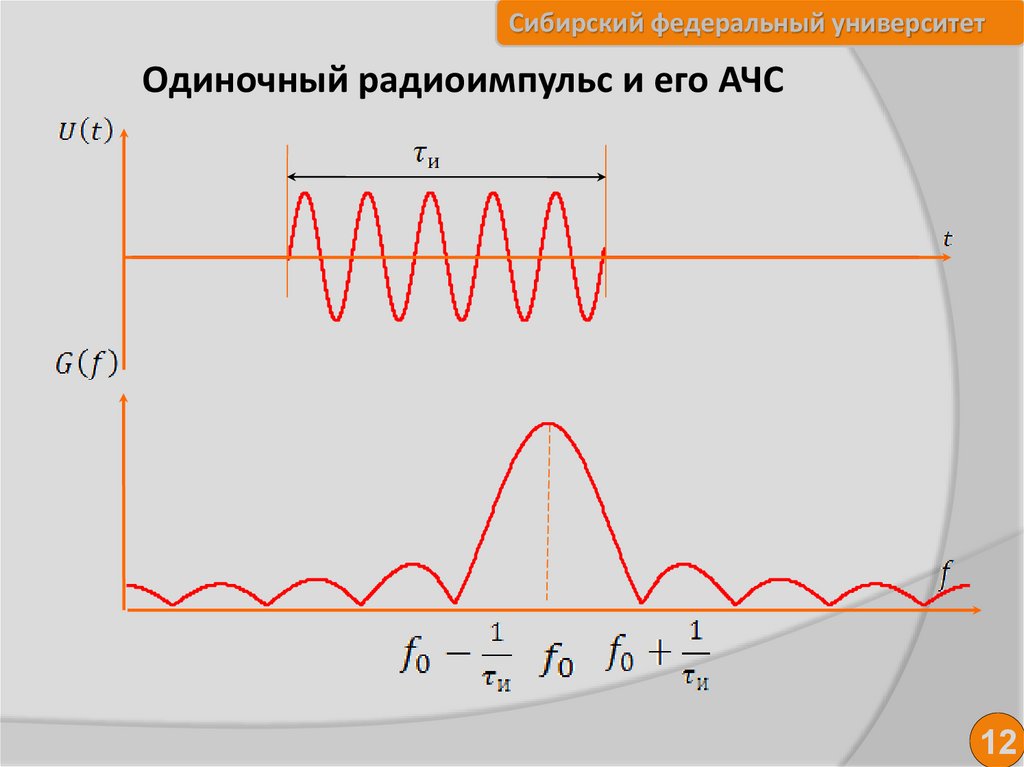
Сибирский федеральный университетОдиночный радиоимпульс и его АЧС
12
13.
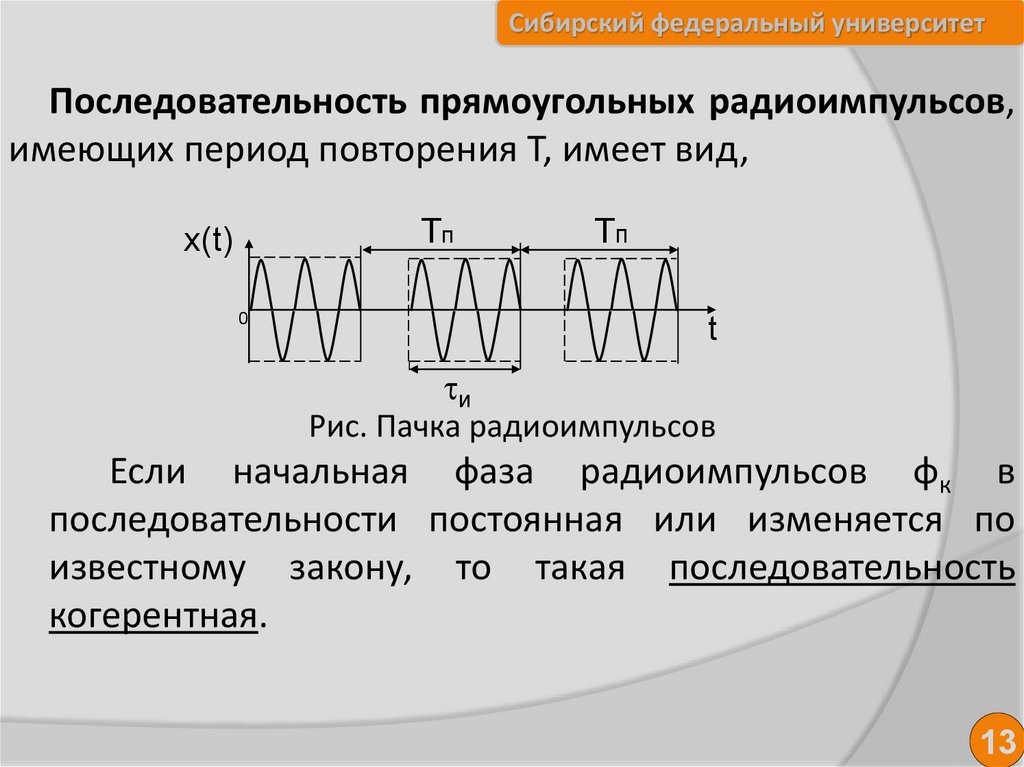
Сибирский федеральный университетПоследовательность прямоугольных радиоимпульсов,
имеющих период повторения T, имеет вид,
Тп
x(t)
0
Tп
t
и
Рис. Пачка радиоимпульсов
Если начальная фаза радиоимпульсов φк в
последовательности постоянная или изменяется по
известному закону, то такая последовательность
когерентная.
13
14.
Сибирский федеральный университетРезультирующей АЧС прямоугольной пачки радиоимпульсов получим путем
графического перемножения функций S1н(ω) и А(ω).
1
2
3
4
т
1
а)