













 Военное дело
Военное делоПохожие презентации:






 РЛС 35Н6. Система обработки сигналов РЛС 35Н6. Тема 5-2")



Виды зондирующих сигналов, применяемых в РЛС РТВ
1.
Сибирский федеральный университетТема№1.Основы теории
радиолокации.
Занятие№8.Виды зондирующих сигналов,
применяемых в РЛС РТВ.
Вид занятия – лекция.
2.
Цель занятия.1.Изучить виды импульсных сигналов,
применяемых в РЛС РТВ.
2.Изучить параметры зондирующих
сигналов, их влияние на защищенность
РЛС и точностные характеристики.
3.
Учебные вопросы:1.Виды импульсных сигналов,
применяемых в РЛС РТВ
2.Влияние структуры и параметров
зондирующего сигнала на тактикотехнические характеристики РЛС.
4.
Литература.1. Ботов М.И. Вяхирев В.А.Теоретическиеосновы РЛ систем РТВ. Военая кафедра
СФУ,2007стр153-169.
2. Теоретические основы радиолокации. Под редакцией
Ширмана Я.Д. Учебное пособие для вузов. М., Изд-во
«Советское радио». 1970. с.20-54
5.
Вопрс№Виды импульсных сигналов, применяемыхв РЛС РТВ.
Под зондирующим радиолокационным сигналом (ЗС)
понимают радиоволну, излученную передающей
антенной РЛС в пространство с заданными
параметрами.
В общем случае ЗС
представлен в виде:
может
быть
x(t) = X(t)·cоs(2 fot + (t) + o),
(1)
где X(t), (t) - законы амплитудной и фазовой
модуляции;
fo - несущая частота;
o - начальная фаза.
6.
Сибирский федеральный университетВыбор зондирующего сигнала является одной из
важнейших задач при проектировании РЛС любого назначения,
так как его форма и параметры в значительной мере определяют
тактико-технические характеристики РЛС (дальность
обнаружения цели, защищенность от активных и пассивных
помех, потенциальную точность измерения дальности,
разрешающую способность по дальности и др.
В радиолокационных станциях применяются различные
виды зондирующих сигналов:
-непрерывные немодулированные;
-непрерывные амплитудно-модулированные;
-непрерывные частотно-модулированные;
-импульсные.
Выбор того или иного вида зондирующего сигнала зависит от
характера решаемых РЛС задач и условий ее функционирования.
В РЛС РТВ, как, впрочем, и в большинстве РЛС иного
назначения, применяются импульсные зондирующие сигналы.
7.
Сибирский федеральный университетПо своей структуре зондирующие радиоимпульсы могут
быть: -одиночными и групповыми (или последовательностями
радиоимпульсов);
-когерентными и некогерентными;
-простыми и сложными.
Одиночные импульсы применяются достаточно редко.
Обнаружение цели и измерение ее координат обычно
осуществляется на основе анализа группы отраженных от цели
радиоимпульсов - "пачки", содержащей М радиоимпульсов.
Радиоимпульсы называются некогерентными, если
начальная фаза высокочастотных колебаний от импульса к
импульсу является неизвестной величиной.
Радиоимпульсы называются когерентными (от лат.
"cohaerentia" - сцепление, связь), если начальная фаза
колебаний каждого радиоимпульса одинаковая или от импульса
к импульсу изменяется по определенному закону.
8.
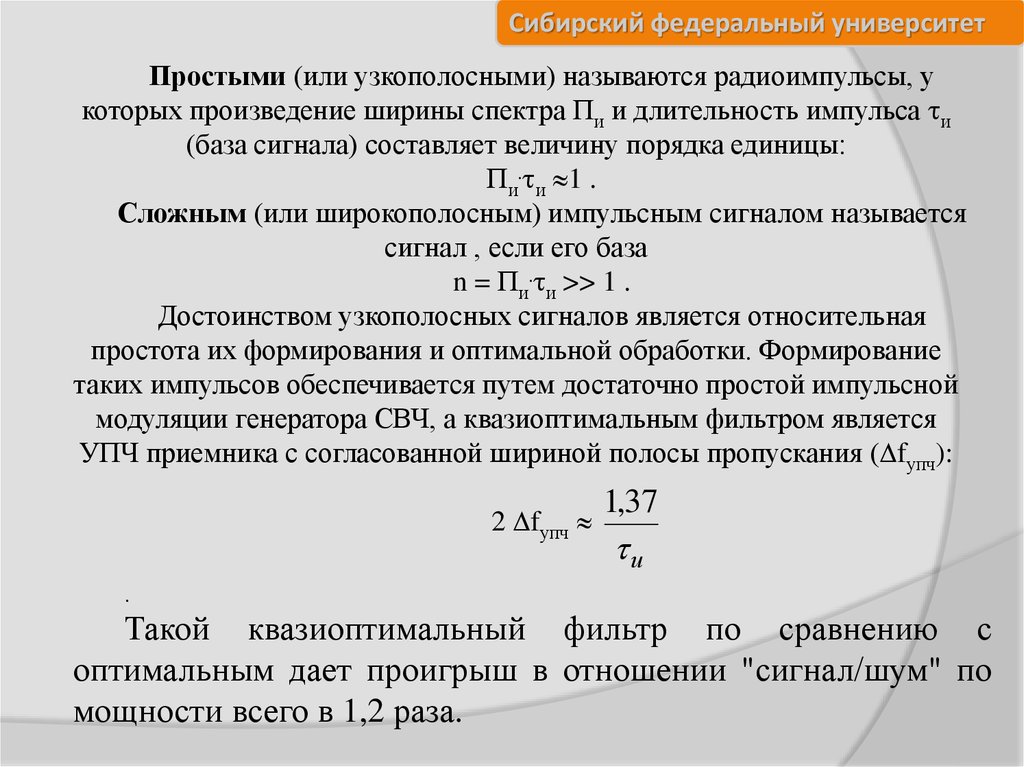
Сибирский федеральный университетПростыми (или узкополосными) называются радиоимпульсы, у
которых произведение ширины спектра Пи и длительность импульса и
(база сигнала) составляет величину порядка единицы:
Пи. и 1 .
Сложным (или широкополосным) импульсным сигналом называется
сигнал , если его база
n = Пи. и >> 1 .
Достоинством узкополосных сигналов является относительная
простота их формирования и оптимальной обработки. Формирование
таких импульсов обеспечивается путем достаточно простой импульсной
модуляции генератора СВЧ, а квазиоптимальным фильтром является
УПЧ приемника с согласованной шириной полосы пропускания ( fупч):
2 fупч
1,37
и
.
Такой квазиоптимальный фильтр по сравнению с
оптимальным дает проигрыш в отношении "сигнал/шум" по
мощности всего в 1,2 раза.
9.
Простые сигналы применялись впервых импульсных РЛС и находят
широкое применение и в настоящее
время ввиду простоты технической
реализации соответствующих
устройств генерирования и обработки.
Однако таким сигналам свойственны
существенные недостатки,
ограничивающие тактико-технические
характеристики РЛС, о чем будет
сказано ниже.
10.
В последние годы в радиолокации все шире стали применятьсясложные сигналы преимущественно двух видов:
1) радиоимпульсы с внутриимпульсной частотной модуляцией, в
частности с линейной частотной модуляцией (ЛЧМ) или с нелинейной
частотной модуляцией (НЧМ);
2) радиоимпульсы с фазовой манипуляцией (от лат. “manus” рука) при которой фаза колебаний внутри импульса через определенные
интервалы скачком изменяется на . Поскольку эти скачкообразные
изменения фазы происходят по определенному двоичному коду, такие
импульсы называются фазокодоманипулированными (ФКМ).
Естественно, по сравнению с простыми радиоимпульсами
формирование и обработка сложных радиоимпульсов представляет собой
более сложную задачу, но применение таких сигналов позволяет
существенно повысить качественные характеристики РЛС. Поэтому в
современных РЛС РТВ в основном применяются сложные зондирующие
сигналы.
Рассмотрим влияние характеристик, параметров и структур
зондирующих радиоимпульсов на ТТХ РЛС РТВ.
11.
Основными параметрами зондирующих сигналовявляются:
1.длина волны -
2.импульсная мощность- PИ
3.частота (период) повторения импульсов - FП ( TП )
4. средняя за период повторения мощность- PС
5. длительность импульса- u
6. несущая частота колебаний- f о
7.ширина спектра сигнала - П
u
12.
Несущая частота fo может быть различной взависимости от рабочего диапазона волн РЛС. Вся
радиолокационная
техника
основана
на
использовании радиоволн УКВ диапазона, имеющих
длину волны меньше 10 метров.
Важной
частотной
характеристикой
сигналов
является их спектр. -.
Энергетический спектр зондирующего сигнала
можно определить как распределение вдоль оси частот его
энергии.
Область частот, в пределах которой сосредоточена основная часть
всей энергии сигнала, называется шириной спектра Δfc(Пи). Обычно
ширина спектра определяется полосой частот, где сосредоточено
~90% энергии сигнала. Например, ширина спектра прямоугольного
видеоимпульса равна
(Δfc
= 1/
Пи=1/
13.
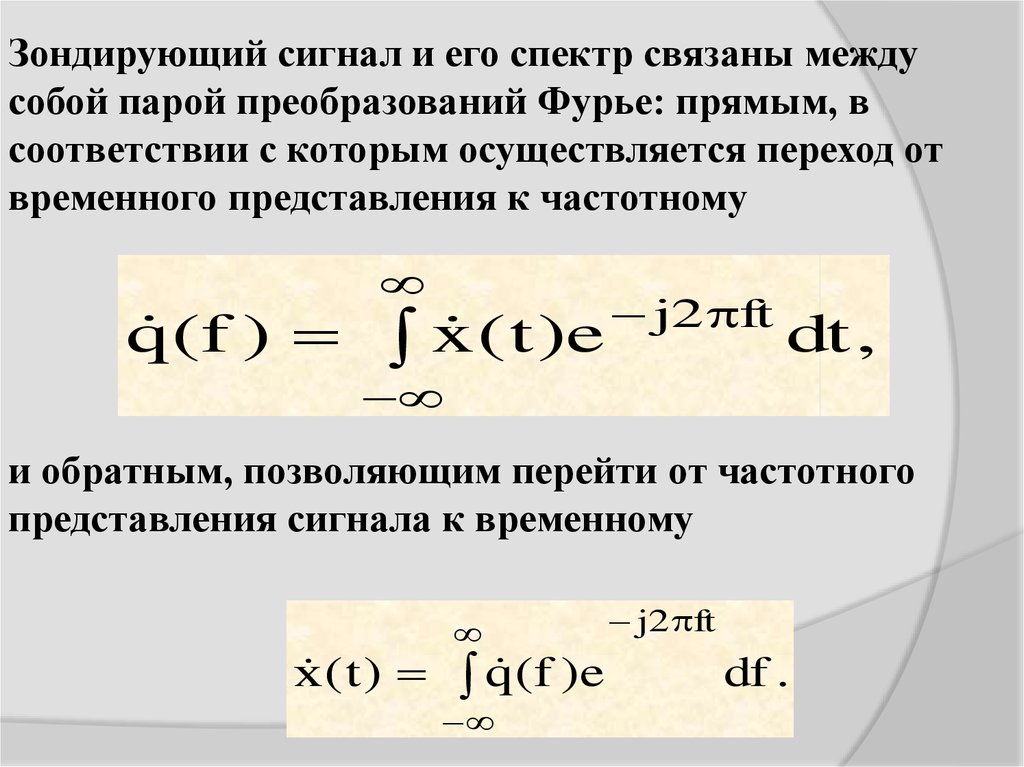
Зондирующий сигнал и его спектр связаны междусобой парой преобразований Фурье: прямым, в
соответствии с которым осуществляется переход от
временного представления к частотному
(f ) x
( t )e
q
j2 ft
dt ,
и обратным, позволяющим перейти от частотного
представления сигнала к временному
(f )e
(t) q
х
j2 ft
df .
14.
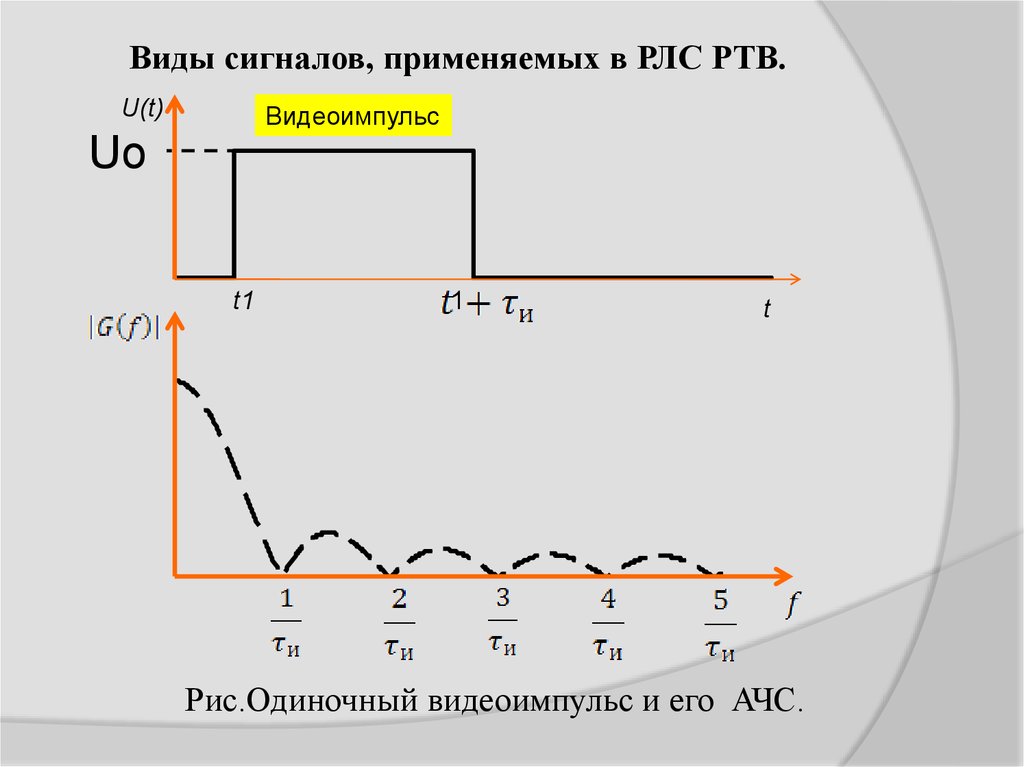
Виды сигналов, применяемых в РЛС РТВ.U(t)
Видеоимпульс
Uо
t1
1
t
Рис.Одиночный видеоимпульс и его АЧС.
15.
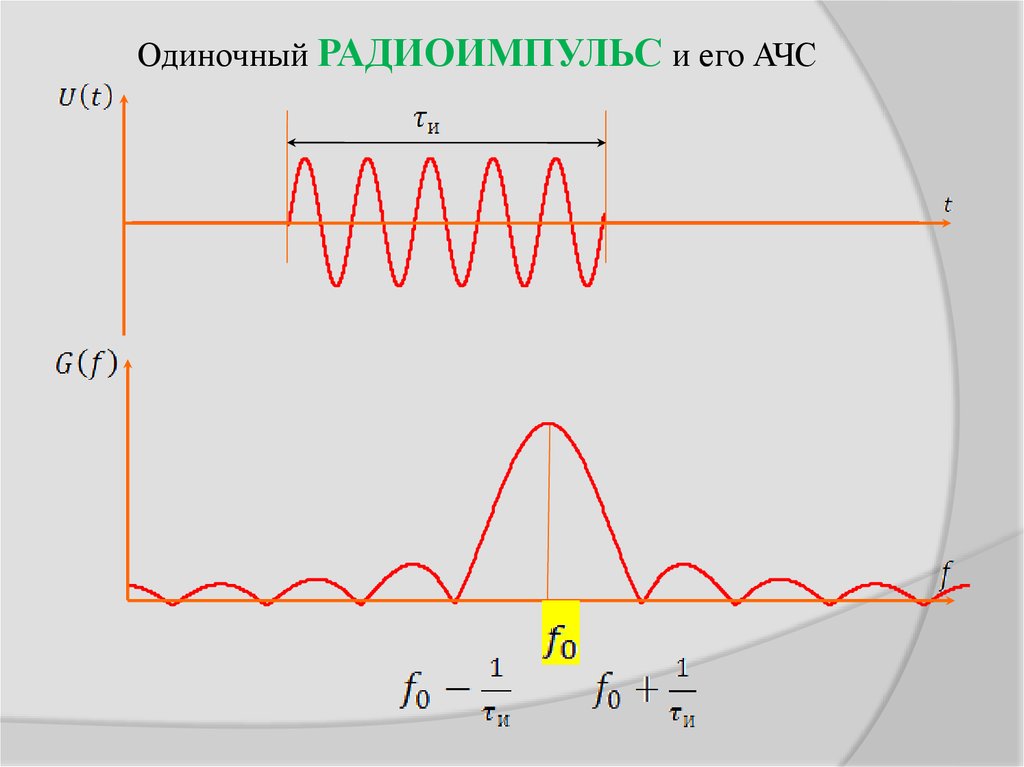
Одиночный РАДИОИМПУЛЬС и его АЧС16.
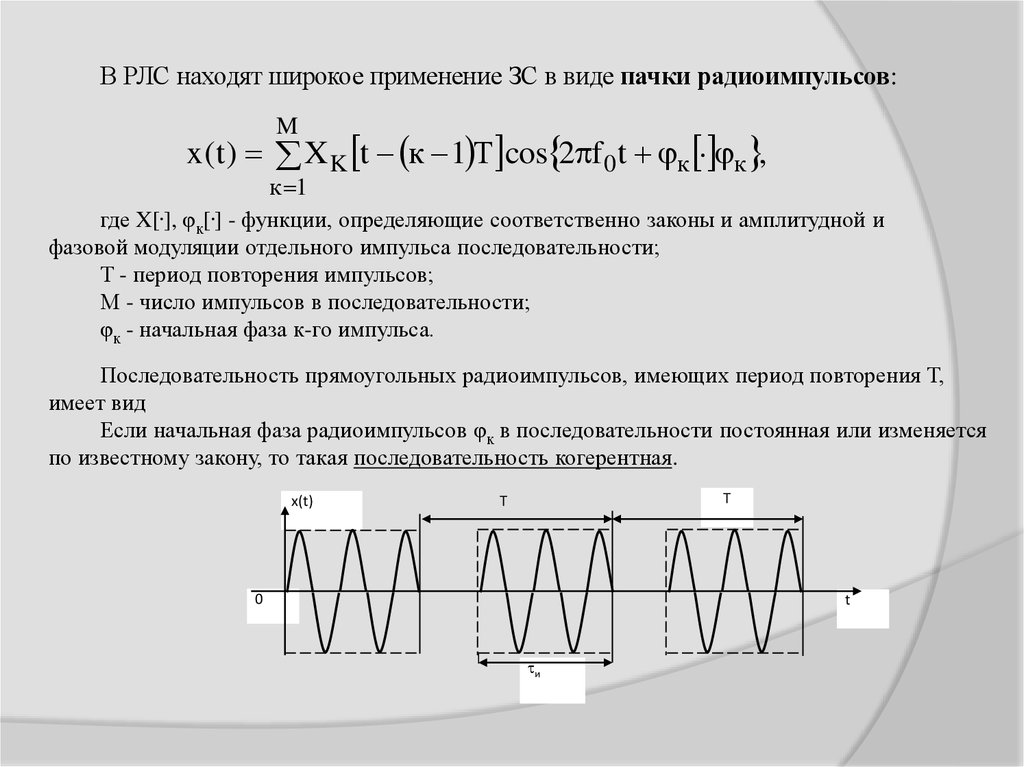
В РЛС находят широкое применение ЗС в виде пачки радиоимпульсов:M
x ( t ) X K t к 1 Т cos 2 f 0 t к
к ,
к 1
где X[.], φк[.] - функции, определяющие соответственно законы и амплитудной и
фазовой модуляции отдельного импульса последовательности;
Т - период повторения импульсов;
М - число импульсов в последовательности;
φк - начальная фаза к-го импульса.
Последовательность прямоугольных радиоимпульсов, имеющих период повторения T,
имеет вид
Если начальная фаза радиоимпульсов φк в последовательности постоянная или изменяется
по известному закону, то такая последовательность когерентная.
x(t)
T
Т
0
t
и
17.
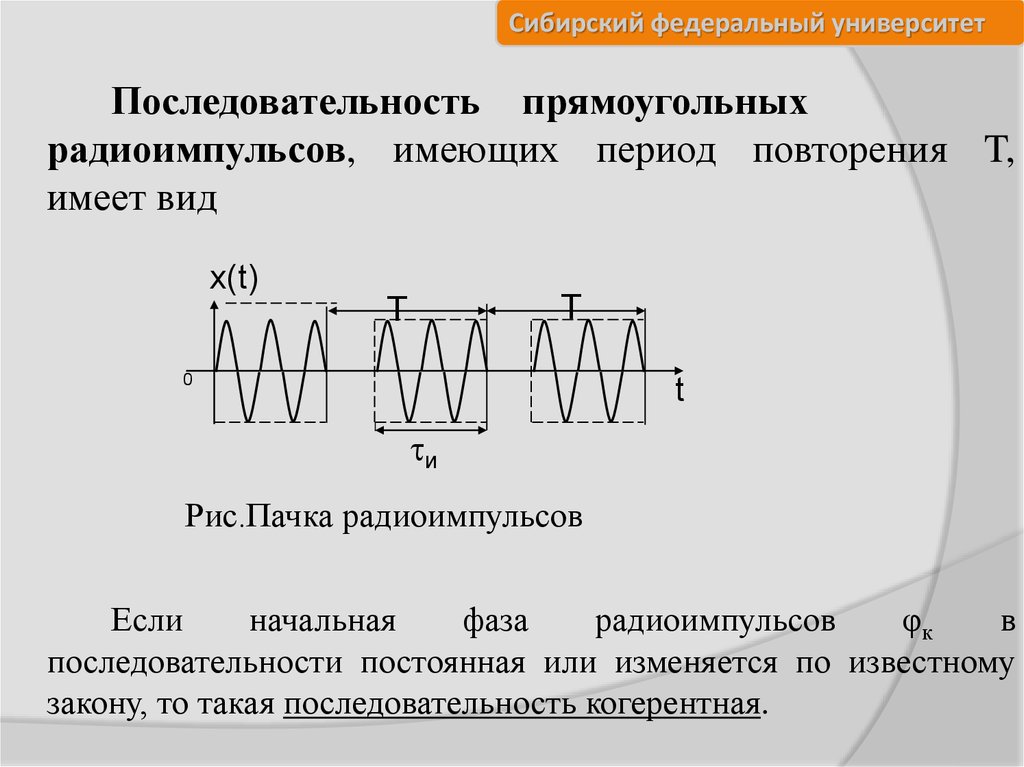
Сибирский федеральный университетПоследовательность прямоугольных
радиоимпульсов, имеющих период повторения T,
имеет вид
x(t)
Т
T
0
t
и
Рис.Пачка радиоимпульсов
Если
начальная
фаза
радиоимпульсов
φк
в
последовательности постоянная или изменяется по известному
закону, то такая последовательность когерентная.
18.
19.
20.
Сибирский федеральный университетf (t ) f0
f
t;
и
t 0
t и
ЛЧМ сигнал и его АЧС
21.
ФКМ радиоимпульс состоит из ряда примыкающих друг к другупрямоугольных парциальных радиоимпульсов, имеющих
одинаковую длительность
и частоту, а начальные фазы φ
0
изменяются по определенному закону.
Сигналы (ФКМ), которые составлены на основе двоичных
кодов: Баркера, М - кодов и т.д. При этом начальные фазы
парциальных импульсов выбираются равными O или π.
Обозначим фазу φ = 0 знаком «+», а φ = π знаком «-». Тогда
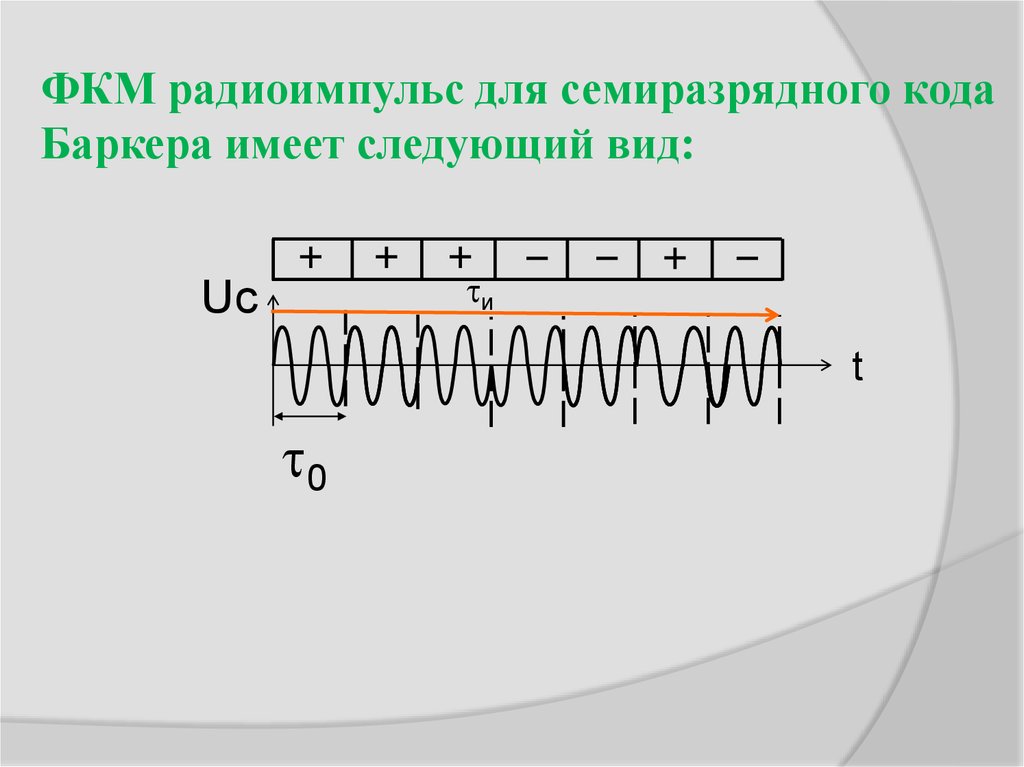
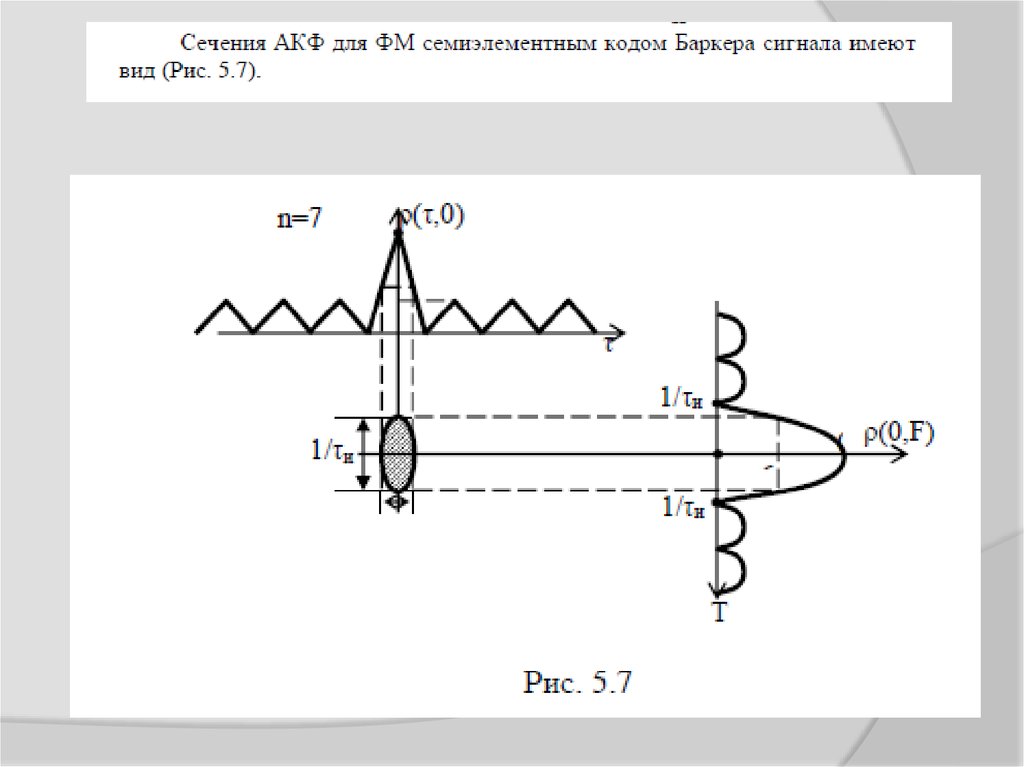
ФКМ радиоимпульс для семиразрядного кода Баркера имеет
следующий вид:
Коды Баркера могут иметь 2,3,4,5,7,11,13 дискрет.
22.
ФКМ радиоимпульс для семиразрядного кодаБаркера имеет следующий вид:
и
Uс
t
0
23.
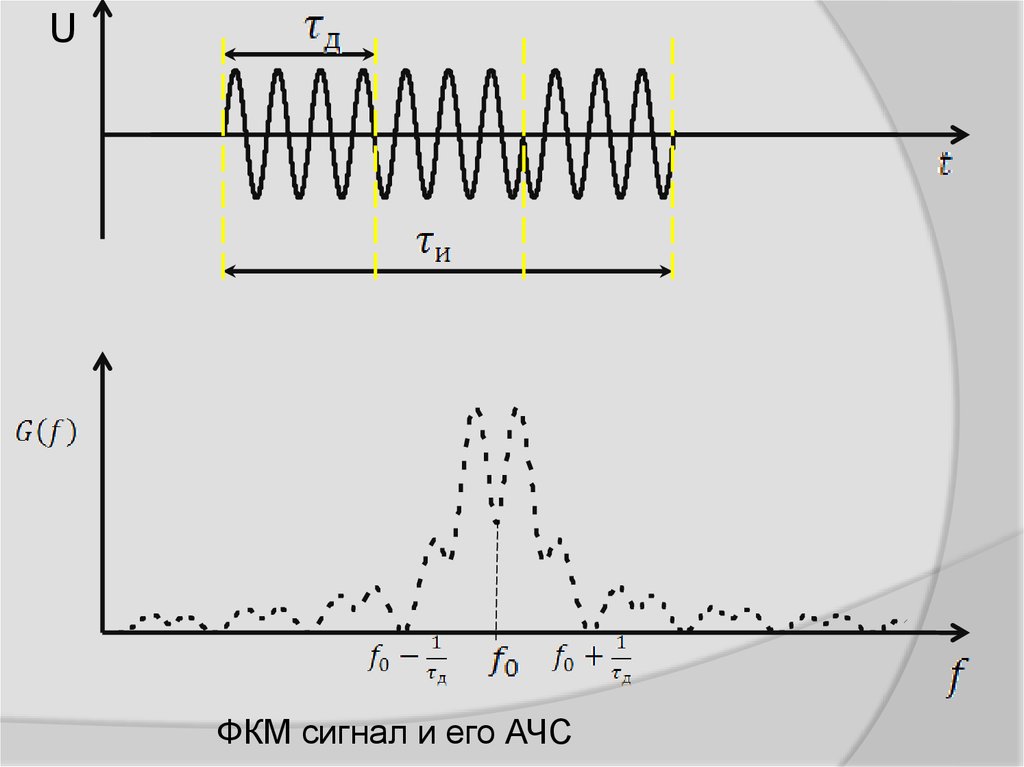
UФКМ сигнал и его АЧС
24.
Вопрос№2. Влияние структуры ипараметров зондирующего сигнала на
тактико- технические характеристики
РЛС.
25.
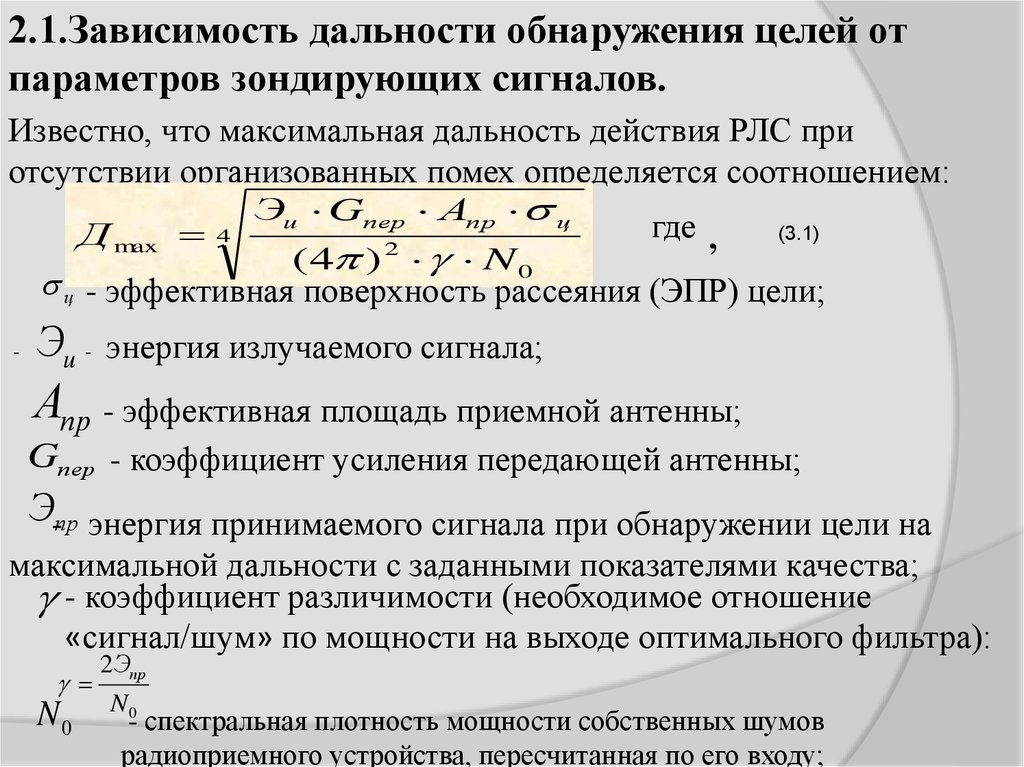
2.1.Зависимость дальности обнаружения целей отпараметров зондирующих сигналов.
Известно, что максимальная дальность действия РЛС при
отсутствии организованных помех определяется соотношением:
Д max
4
Эu Gпер Апр ц
( 4 ) N 0
2
где
,
(3.1)
ц - эффективная поверхность рассеяния (ЭПР) цели;
-
Эu -
энергия излучаемого сигнала;
Апр - эффективная площадь приемной антенны;
Gпер - коэффициент усиления передающей антенны;
Э-пр энергия принимаемого сигнала при обнаружении цели на
максимальной дальности с заданными показателями качества;
- коэффициент различимости (необходимое отношение
«сигнал/шум» по мощности на выходе оптимального фильтра):
N0
2Эпр
N0
- спектральная плотность мощности собственных шумов
радиоприемного устройства, пересчитанная по его входу;
26.
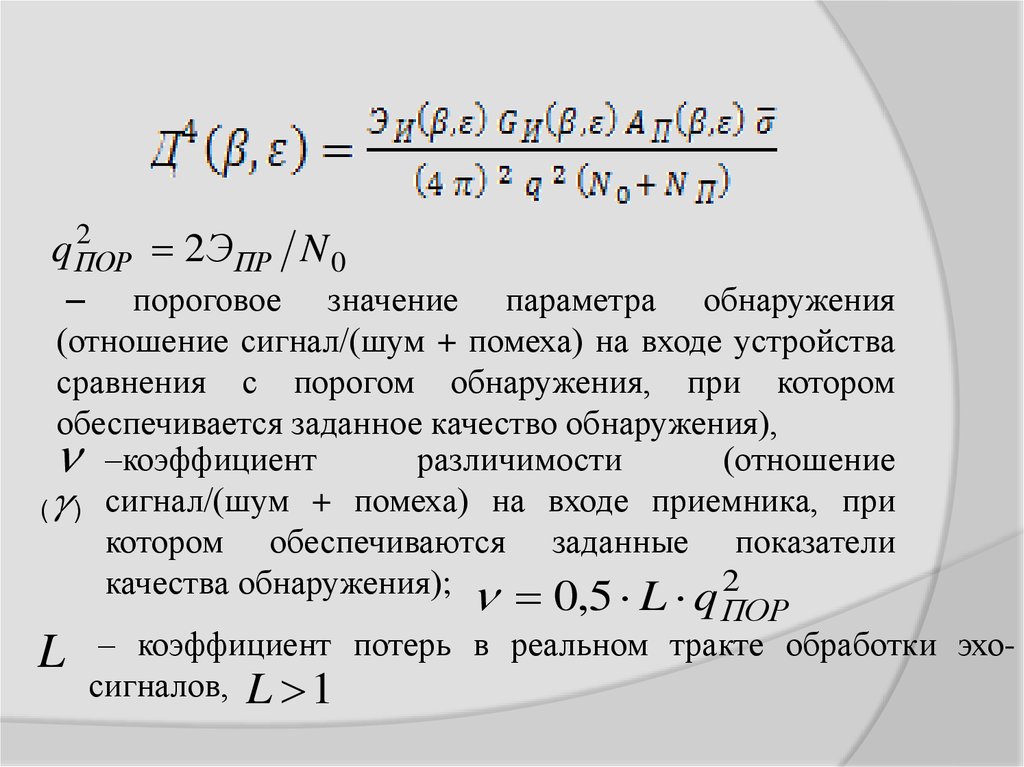
2q ПОР
2Э ПР N 0
– пороговое значение параметра обнаружения
(отношение сигнал/(шум + помеха) на входе устройства
сравнения с порогом обнаружения, при котором
обеспечивается заданное качество обнаружения),
различимости
(отношение
–коэффициент
( ) сигнал/(шум + помеха) на входе приемника, при
котором обеспечиваются заданные показатели
качества обнаружения); 0,5 L q 2
ПОР
L
– коэффициент потерь в реальном тракте обработки эхосигналов, L 1
27.
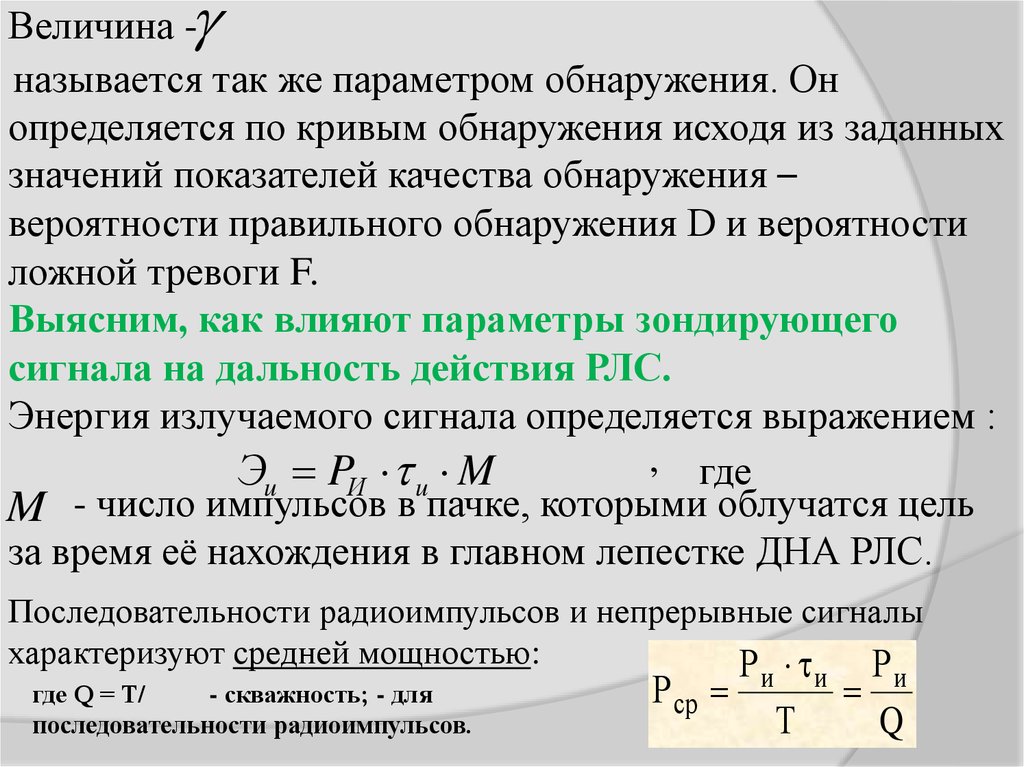
Величина называется так же параметром обнаружения. Онопределяется по кривым обнаружения исходя из заданных
значений показателей качества обнаружения –
вероятности правильного обнаружения D и вероятности
ложной тревоги F.
Выясним, как влияют параметры зондирующего
сигнала на дальность действия РЛС.
Энергия излучаемого сигнала определяется выражением :
, где
Эu PИ u M
M - число импульсов в пачке, которыми облучатся цель
за время её нахождения в главном лепестке ДНА РЛС.
Последовательности радиоимпульсов и непрерывные сигналы
характеризуют средней мощностью:
Р
Р
где Q = T/
- скважность; - для
последовательности радиоимпульсов.
Р ср
и
и
Т
и
Q
28.
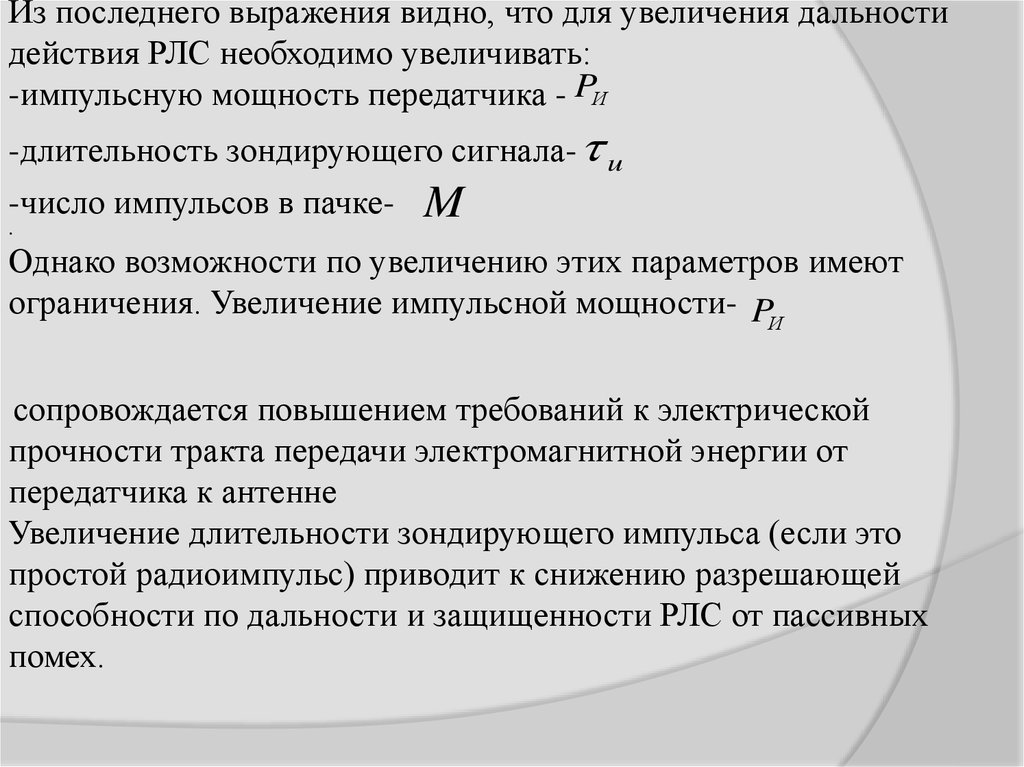
Из последнего выражения видно, что для увеличения дальностидействия РЛС необходимо увеличивать:
-импульсную мощность передатчика - PИ
-длительность зондирующего сигнала- u
-число импульсов в пачке.
M
Однако возможности по увеличению этих параметров имеют
ограничения. Увеличение импульсной мощности- PИ
сопровождается повышением требований к электрической
прочности тракта передачи электромагнитной энергии от
передатчика к антенне
Увеличение длительности зондирующего импульса (если это
простой радиоимпульс) приводит к снижению разрешающей
способности по дальности и защищенности РЛС от пассивных
помех.
29.
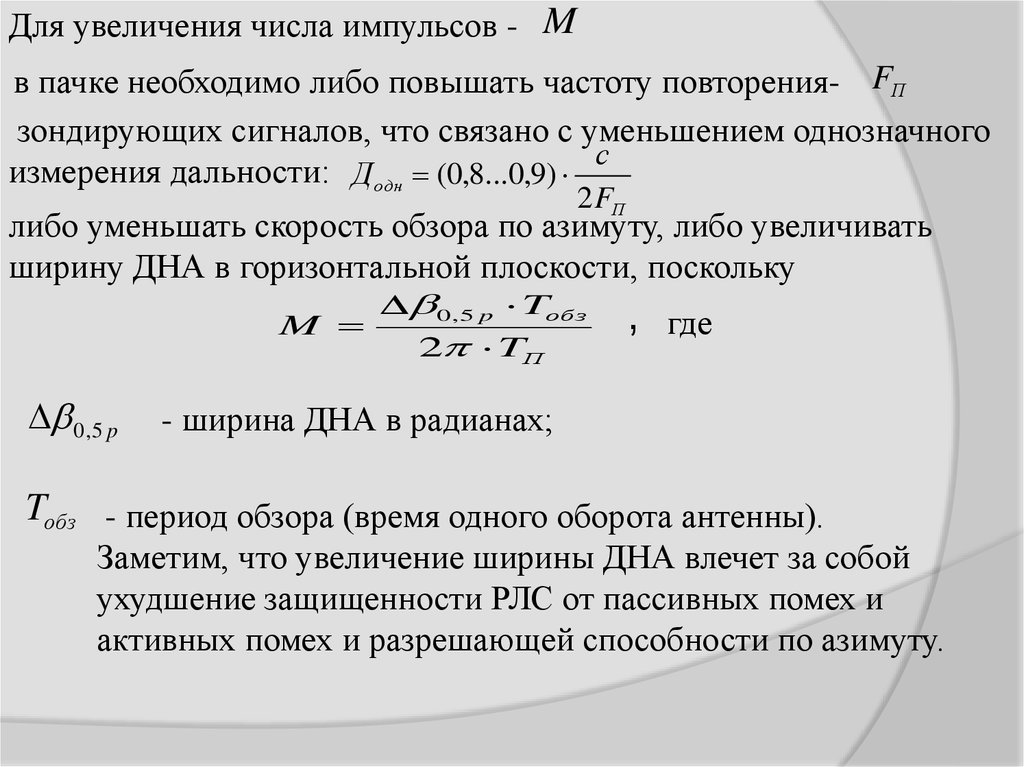
Для увеличения числа импульсов - Mв пачке необходимо либо повышать частоту повторения- FП
зондирующих сигналов, что связано с уменьшением однозначного
с
измерения дальности: Д одн (0,8...0,9)
2 FП
либо уменьшать скорость обзора по азимуту, либо увеличивать
ширину ДНА в горизонтальной плоскости, поскольку
0, 5 p Tобз
, где
M
2 TП
0 , 5 p
- ширина ДНА в радианах;
Tобз - период обзора (время одного оборота антенны).
Заметим, что увеличение ширины ДНА влечет за собой
ухудшение защищенности РЛС от пассивных помех и
активных помех и разрешающей способности по азимуту.
30.
Сибирский федеральный университетВыясним, как влияет длина волны на дальность
действия РЛС. Во-первых, необходимо учесть, что
в радиолокации чаще всего используется одна
антенна на передачу и прием, для которой
эффективная площадь и коэффициент усиления
связаны соотношением:
G = 4 .Aпр/ 2 .
Поэтому выражение (3.1) можно переписать
следующим образом:
Эи А ц
2
rmax 4
4 2 N o
,
(3.2)
31.
Сибирский федеральный университетНепосредственно из формулы (3.2) следует, что при Апр=const
увеличение длины волны приводит к уменьшению дальности.
Однако при изменении длины волны остальные величины,
входящие в формулу (3.2), не остаются постоянными. Так, от длины
волны зависит среднее значение ЭПР цели σц: в метровом диапазоне
волн она больше, чем в дециметровом и тем более в сантиметровом,
изменяется ширина ДНА 0,5р /Lа и соответственно количество
импульсов в пачке М.
Таким образом, с этой точки зрения, увеличение длины волны
приводит к увеличению дальности действия. Кроме того, на
дальность действия РЛС существенное влияния оказывает
затухание радиоволн, вызванное поглощением и рассеянием
электромагнитной энергии в тропосфере:
RmaxЗ = RmaxО.10-k ,
где k = 0,05.d.RmaxЗ; d- коэффициент затухания в дБ/км; Rmax O и
RmaxЗ - максимальная дальность без учета и с учетом затухания
соответственно.
32.
2.2. Влияние структур и параметровзондирующих радиоимпульсов на разрешающую
способность РЛС
Различают потенциальную и реальную разрешающие
способности.
Потенциальная разрешающая способность характеризует предельно
достижимое разрешение и определяется соотношением сигнал/шум и протяженностью сечения тела неопределенности (двумерной автокорреляционной функции) зондирующего сигнала РЛС по параметру разрешения.
Чем больше отношение сигнал/шум и меньше протяженность тела неопределенности по соответствующему параметру, тем при всех прочих равных
условиях выше потенциальная разрешающая способность РЛС.
Реальная разрешающая способность всегда хуже потенциальной.
К факторам, ухудшающим разрешающую способность, относятся:
-неоптимальность структуры радиолокационных приемников с точки
зрения решения задачи разрешения сигналов;
-ограничение сигналов из-за недостаточного динамического диапазона приемного тракта;
-ограниченная разрешающая способность устройств измерения координат
33.
Рассмотрим зависимость потенциальной разрешающейспособности РЛС от параметров зондирующих сигналов с
помощью анализа соответствующих двумерных
автокорреляционных функций.
Известные схемы оптимальной (согласованной) обработки
радиолокационных сигналов базируются на операции
вычисления корреляционного интеграла (модульного значения):
здесь U (t)– комплексная амплитуда зондирующего сигнала;
– комплексная амплитуда ожидаемого сигнала
с учетом запаздывания t и доплеровской добавки частоты Fд ;
знак минус в показателе степени экспоненты учитывает, что при радиальной
скорости Vr > 0 (удаляющаяся цель) частота отраженного сигнала менее
частоты зондирующего.
Величина принимаемого сигнала Y(t) является, в общем случае,
суммой комплексных амплитуд сигнала и помехи:
34.
Интеграл зависящий от сигнала и его модульное значение представляютсобой функции разностей ожидаемого tз и истинного tзо времени
запаздывания, ожидаемой Fд и истинной Fдо доплеровских частот:
После вычисления получаем
Функция ψ(τ,F) называется двумерной автокорреляционной функцией сигнала. Она зависит от своих разностных аргументов τ, F и не зависит от значений tз и Fд . Кроме того, функция ψ(τ,F) зависит от вида
комплексной огибающей когерентного сигнала U (t).
Функцию ρ(τ,F) называют нормированной двумерной
автокорреляционной функцией сигнала.
35.
1, F
2Э
*
j 2 F
G
f
G
f
F
e
df
И
-нормированная АКФ «2»
Функцию, зависящую от рассогласования истинных и измеряемых
параметров сигнала, называют функцией рассогласования или
автокорреляционной функцией (АКФ) сигнала. Математически
сказанное можно описать следующим образом:
, ~
( , ~ )
t , ~ X t , dt
X
где:
- автокорреляционная функция;
X t , ~ – комплексная амплитуда принятого сигнала;
t , – комплексная амплитуда ожидаемого сигнала.
X
,
36.
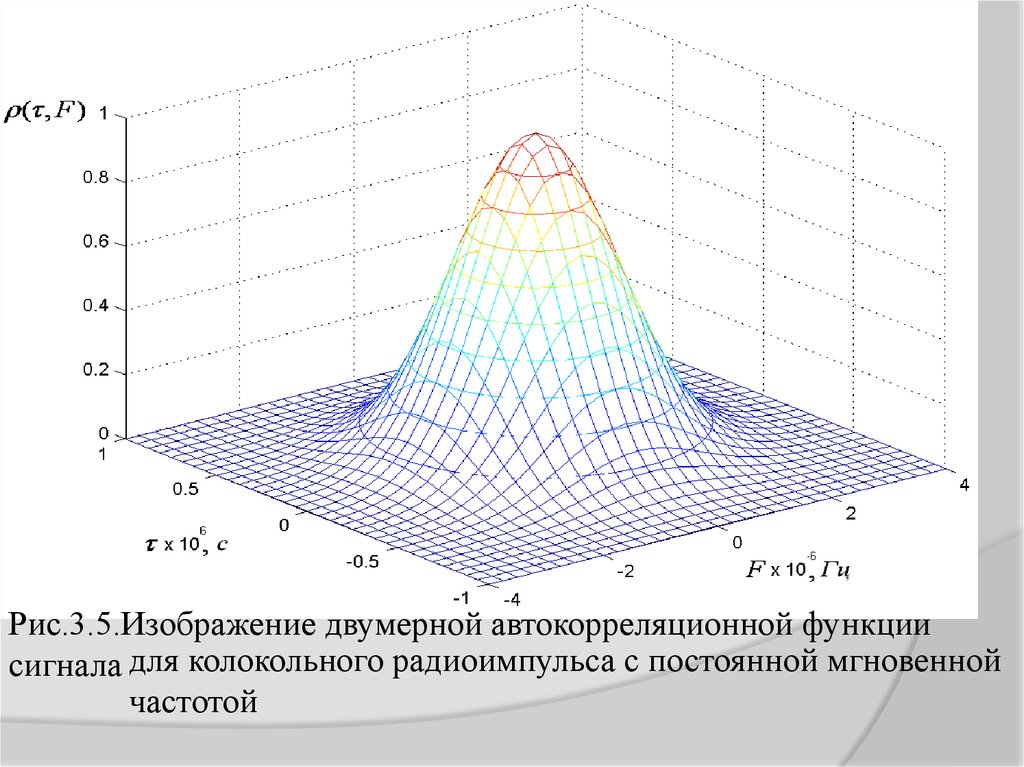
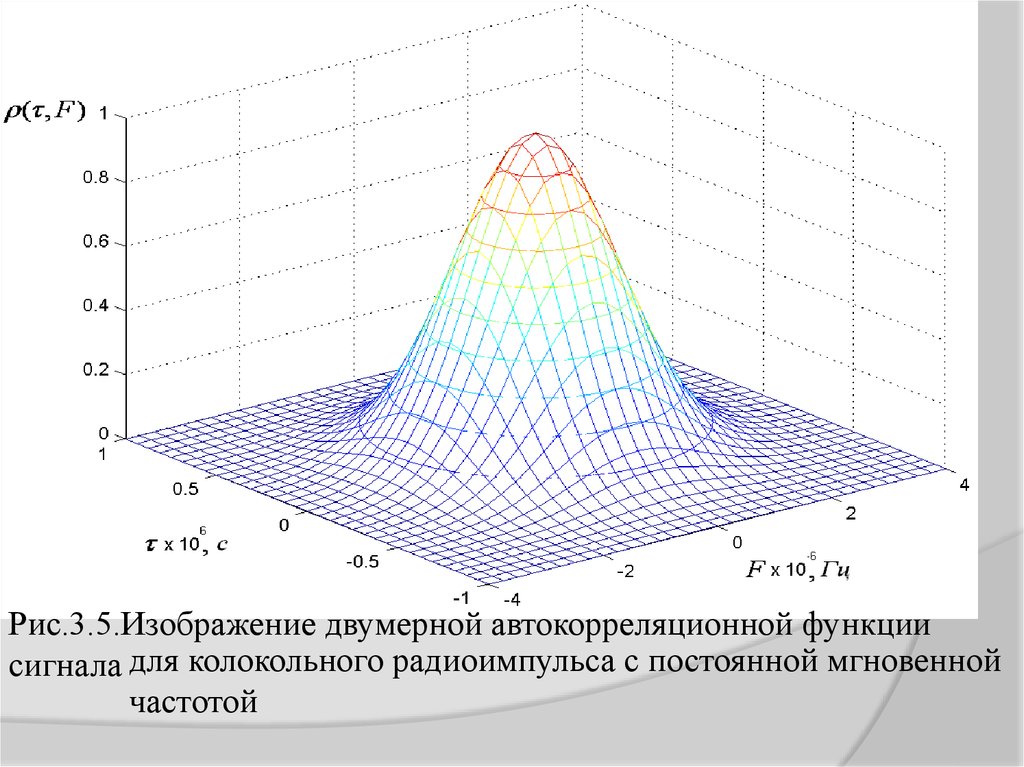
Рис.3.5.Изображение двумерной автокорреляционной функциисигнала для колокольного радиоимпульса с постоянной мгновенной
частотой
37.
1, F
2Э
*
j 2 F
G
f
G
f
F
e
df
И
(2.)
,
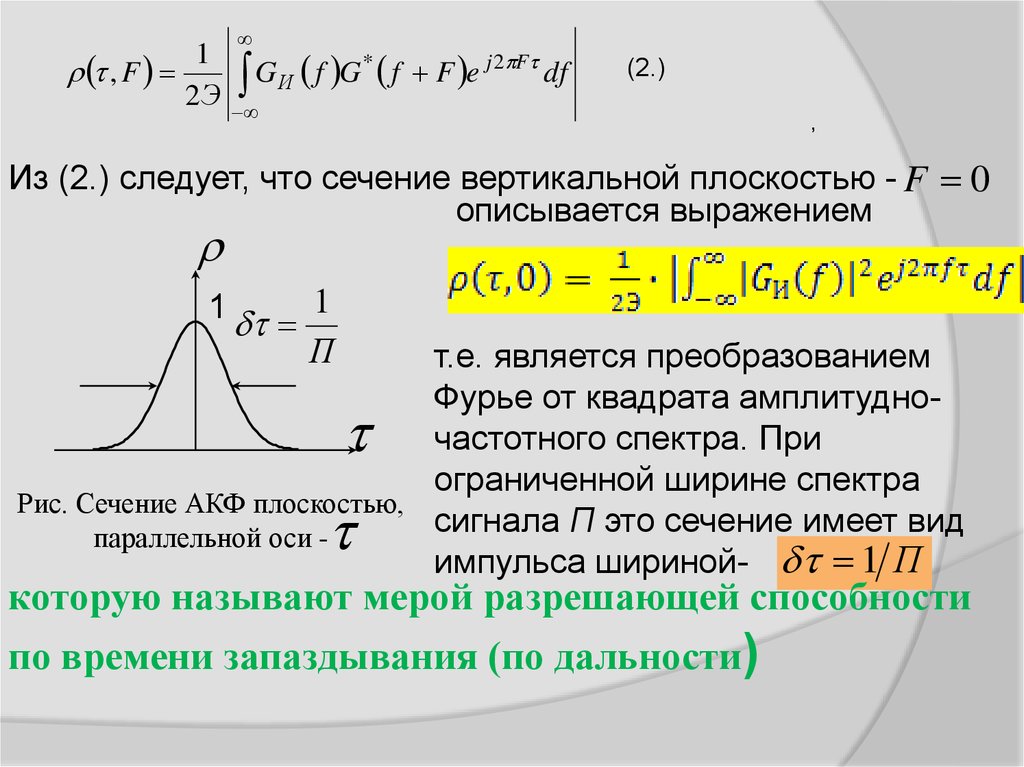
Из (2.) следует, что сечение вертикальной плоскостью - F 0
описывается выражением
1
1
П
т.е. является преобразованием
Фурье от квадрата амплитудночастотного спектра. При
ограниченной ширине спектра
Рис. Сечение АКФ плоскостью,
сигнала П это сечение имеет вид
параллельной оси импульса шириной- 1 П
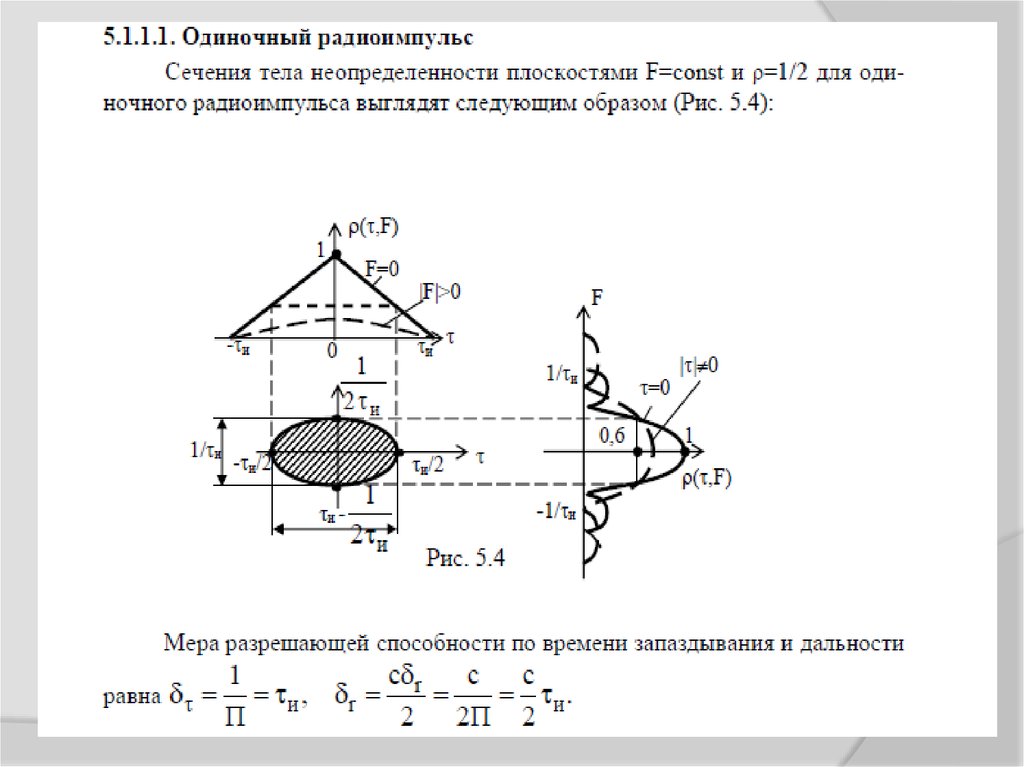
которую называют мерой разрешающей способности
по времени запаздывания (по дальности)
38.
Рассмотрим задачу разрешения сигналов по времени (дальности),анализируя сигналы на выходе оптимального фильтра.
Пусть отраженные от сосредоточенных вторичных излучателей
прямоугольные импульсы без внутриимпульсной модуляции обрабатываются
оптимально и сдвинуты во времени на
где ΔД = Д2 − Д1 – расстояние между вторичными излучателями. На
рис. 3.7 показаны огибающие выходных импульсов оптимального фильтра.
39.
Величина минимального интервала Δt определяетсявозможностью раздельного наблюдения смежных импульсов.
В рассматриваемом случае в качестве условной разрешающей
способности по времени можно принять значение и Δt = τ, при
котором максимуму огибающей сигнала, отраженного от
одной цели, соответствует нулевое значение огибающей импульса от другой. Соответственно мерой разрешающей
способности по дальности называют
Таким образом, потенциальная разрешающая способность
РЛС по дальности определяется по выражению
и зависит от ширины спектра сигнала.
40.
Потенциальная разрешающая способность по угловымкоординатам определяется шириной ДНА в
соответствующей плоскости по уровню половинной мощности
min δΘ =0,5Р
Для увеличения потенциальной разрешающей способности
необходимо, как и при измерении угловых координат,
увеличивать отношение сигнал/шум γ на входе
измерительного устройства (повышать энергию зондирующего
и, следовательно, отраженного сигналов), а также уменьшать
угловые размеры ДНА. Последнее, при неизменных размерах
антенны, достигается уменьшением длины волны λ
(повышением несущей частоты) зондирующего сигнала.
Обобщенной мерой разрешающей способности импульсной
РЛС по дальности и угловым координатам является
импульсный объем, в пределах которого цели не разрешаются.
41.
Сибирский федеральный университетТаким образом
Разрешающая способность по дальности составляет
R c/2Пи, При использовании в качестве зондирующего сигнала
когерентной пачки разрешающая способность по дальности
определяется шириной спектра одиночного импульса
(длительностью импульса на выходе приемного тракта :
а по угловым координатам min 0,5p. Поэтому влияние
параметров зондирующего сигнала в данном случае такое же, как и
при измерении соответствующих координат.
Разрешение по скорости возможно при использовании
когерентной пачки импульсов, поскольку она имеет дискретный
спектр. Т.е.разрешающая способность по частоте определяется
длительностью пачки
При этом разрешающая способность по скорости - это
фактически разрешающая способность по частоте: Fmin 1/М.Тп , т.е.
тем выше, чем больше длительность пачки М.Тп.
42.
Повышение разрешающей способности по дальности иугловым координатам приводит к уменьшению разрешаемого
объема, а следовательно, к уменьшению среднего значения ЭПР
источника пассивной помехи.
Разрешающая способность по скорости позволяет выделять
полезный сигнал на фоне пассивной помехи за счет разности
радиальных скоростей на основе использования эффекта Доплера.
При учете влияния параметров зондирующих сигналов на
разрешающую способность по скорости, речь должна идти о
необходимости одновременного разрешения по дальности и
скорости.
Таким образом, к двумерной автокорреляционной функции сигнала
должны быть предъявлены требования быть узкой и по оси времени
(
) и по оси частот ( F )
, что является преодолением известного в теории радиолокации
принципа неопределенности.
43.
2.3. ЗАВИСИМОСТЬ ТОЧНОСТИ ИЗМЕРЕНИЯКООРДИНАТ ЦЕЛЕЙ ОТ ПАРАМЕТРОВ
ЗОНДИРУЮЩИХ СИГНАЛОВ
Точность измерения координат целей является одной из
важнейших характеристик РЛС, определяющих её
возможности при решении задач целеуказания активным родам
войск ПВО и ВВС и наведения истребителей.
Ошибка измерения представляет собой разность между
истинным и измеренным значениями параметра:
ист
Δx = x − xˆ,
где ˆx – измеренное значение (оценка) параметра.
44.
Ошибки измерениядальности
,
Как известно из курса теоретических основ радиолокации,
потенциальная точность измерения дальности (т.е. предельно
достижимая средняя квадратическая ошибка при использовании
колоколообразного сигнала) определяется соотношением:
Rпот =
с
2 П эф q M
где Пэф- эффективная ширина спектра зондирующего сигнала,
Пэф (1,01 - 1,57). Пи ; q2 - отношение "сигнал/шум" на выходе
оптимального
фильтра
(или
на
входе
измерительного
устройства)(параметр обнаружения) q2=2.Эпр/ Nо.
Отсюда видно, что для повышения потенциальной точности
измерения дальности необходимо, как и для увеличения дальности
действия, увеличивать энергию принимаемого сигнала и снижать
спектральную плотность мощности шума приемника.
Кроме того, для повышения потенциальной точности измерения дальности до цели
(уменьшения Дпот σ )необходимо увеличивать ширину спектра зондирующего сигнала.
45.
Так как для повышения точности измерения дальностинеобходимо увеличивать ширину спектра сигнала, то в случае
,
применения простых радиоимпульсов требуется их укорочение, что
приведёт к снижению энергии сигнала.
Таким образом, при использовании простых радиоимпульсов
возникает противоречие, разрешение которого оказывается
возможным на основе применения сложных сигналов.
Ошибки измерения угловых координат
Потенциальная точность измерения угловых координат
определяется соотношением:
k 0,5 p
пот = q M
где 0,5p - ширина ДНА в соответствующей плоскости; k коэффициент, учитывающий форму ДНА и способ измерения
угловой координаты (К 1).
46.
Сибирский федеральный университетИзвестно,
что
форма
сечения
автокорреляционной функции вертикальной
плоскостью, параллельной оси
(плоскостью F = const), соответствует форме
огибающей сигнала на выходе согласованного
фильтра, расстроенного по частоте относительно
частоты сигнала на величину F, а форма сечения
функции ( ,F) плоскостью F = 0 совпадает с
формой
огибающей
сигнала
на
выходе
согласованного фильтра, настроенного на частоту
обрабатываемого сигнала. По виду функции (3.5)
можно судить о потенциальных возможностях
сигнала как по точности измерения дальности так
и разрешающей способности по дальности.
47.
Рис.3.5.Изображение двумерной автокорреляционной функциисигнала для колокольного радиоимпульса с постоянной мгновенной
частотой
48.
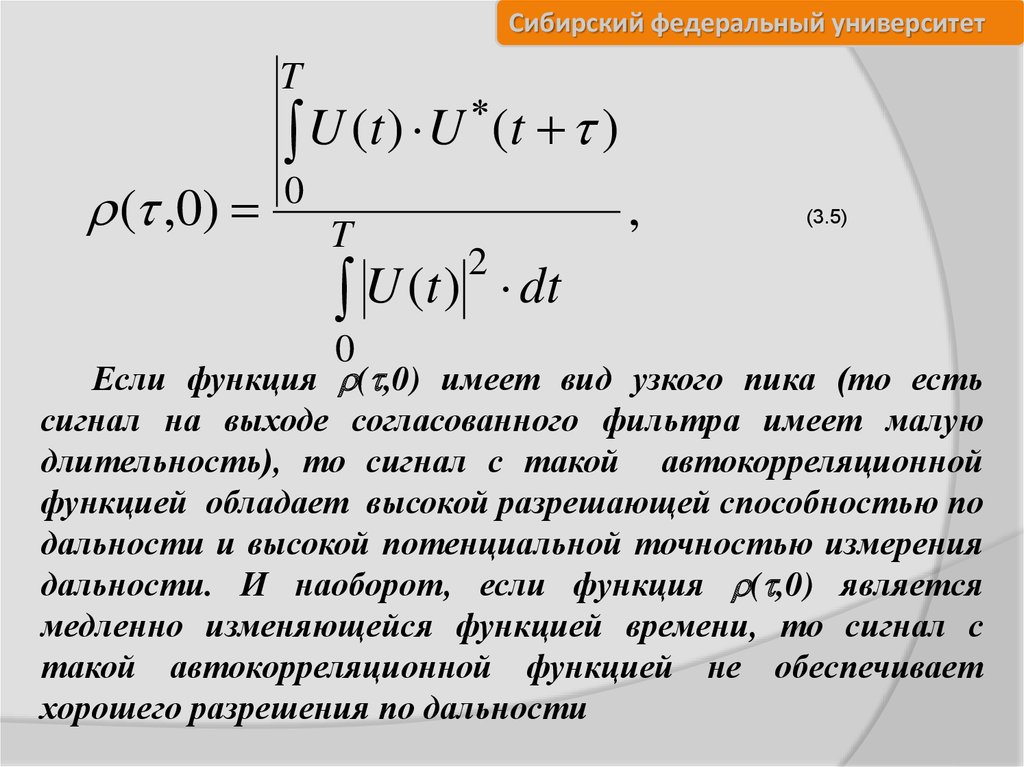
Сибирский федеральный университетT
( ,0)
U (t ) U
(t )
0
T
U (t )
0
,
2
(3.5)
dt
Если функция ( ,0) имеет вид узкого пика (то есть
сигнал на выходе согласованного фильтра имеет малую
длительность), то сигнал с такой автокорреляционной
функцией обладает высокой разрешающей способностью по
дальности и высокой потенциальной точностью измерения
дальности. И наоборот, если функция ( ,0) является
медленно изменяющейся функцией времени, то сигнал с
такой автокорреляционной функцией не обеспечивает
хорошего разрешения по дальности
49.
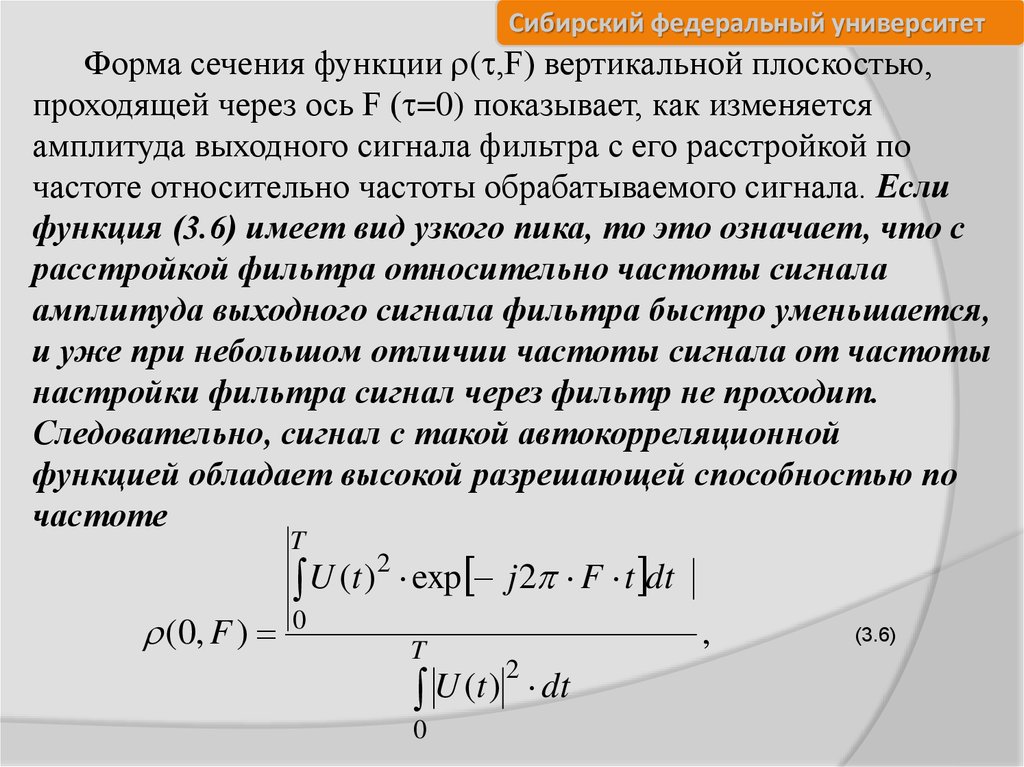
Сибирский федеральный университетФорма сечения функции ( ,F) вертикальной плоскостью,
проходящей через ось F ( =0) показывает, как изменяется
амплитуда выходного сигнала фильтра с его расстройкой по
частоте относительно частоты обрабатываемого сигнала. Если
функция (3.6) имеет вид узкого пика, то это означает, что с
расстройкой фильтра относительно частоты сигнала
амплитуда выходного сигнала фильтра быстро уменьшается,
и уже при небольшом отличии частоты сигнала от частоты
настройки фильтра сигнал через фильтр не проходит.
Следовательно, сигнал с такой автокорреляционной
функцией обладает высокой разрешающей способностью по
частоте
T
(0, F )
2
U
(
t
)
exp j 2 F t dt
0
T
,
2
U (t ) dt
0
(3.6)
50.
fU
Сибирский федеральный университет
m
U
и
f
m
(t )
f (t )
0
а)
F
д
0
и
t
F
д1
0
F
2
б)
д2
F
д1
и
F
д
1
в)
0,5
и
и
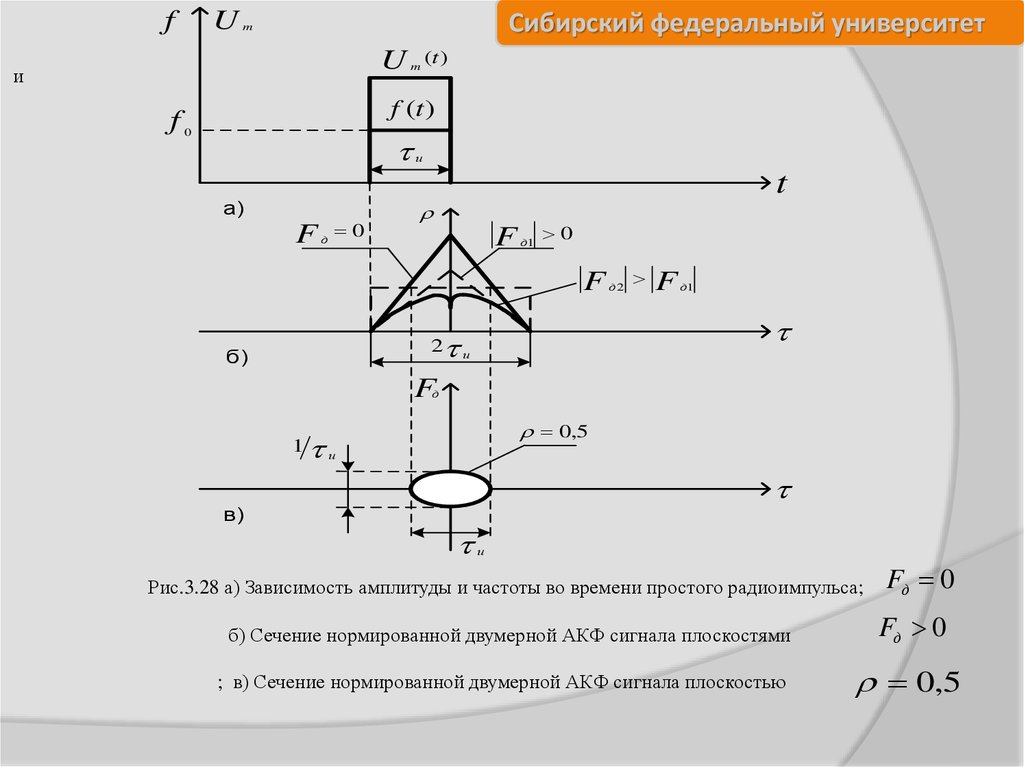
Рис.3.28 а) Зависимость амплитуды и частоты во времени простого радиоимпульса;
б) Сечение нормированной двумерной АКФ сигнала плоскостями
; в) Сечение нормированной двумерной АКФ сигнала плоскостью
Fд 0
Fд 0
0,5
51.
52.
Сибирский федеральный университетτ
F
Рис. 4. 35. Тело неопределённости
одиночного радиоимпульса
53.
Сибирский федеральный университет.
Такой сигнал обладает следующими достоинствами:
1.достигается наибольшая простота технической реализации устройств
формирования и обработки;
2.отсутствие боковых лепестков по оси
за счет чего при одинаковых с другими сигналами энергиях обеспечивается
наименьшая вероятность ложных тревог;
3.при малых значениях u
высокое разрешение сочетается с однозначной
селекцией целей по дальности;
4.при больших значениях u большая дальность обнаружения сочетается с
высоким разрешением и селекцией целей по доплеровской частоте (скорости).
Основные недостатки:
-нельзя одновременно получить высокое разрешение по дальности и скорости,
высокое разрешение по дальности и большую дальность обнаружения;
-плохая скрытность из-за сравнительно высокой спектральной плотности
мощности при одинаковых с другими сигналами значениях длительности
и пиковых мощностей
u
PИ
54.
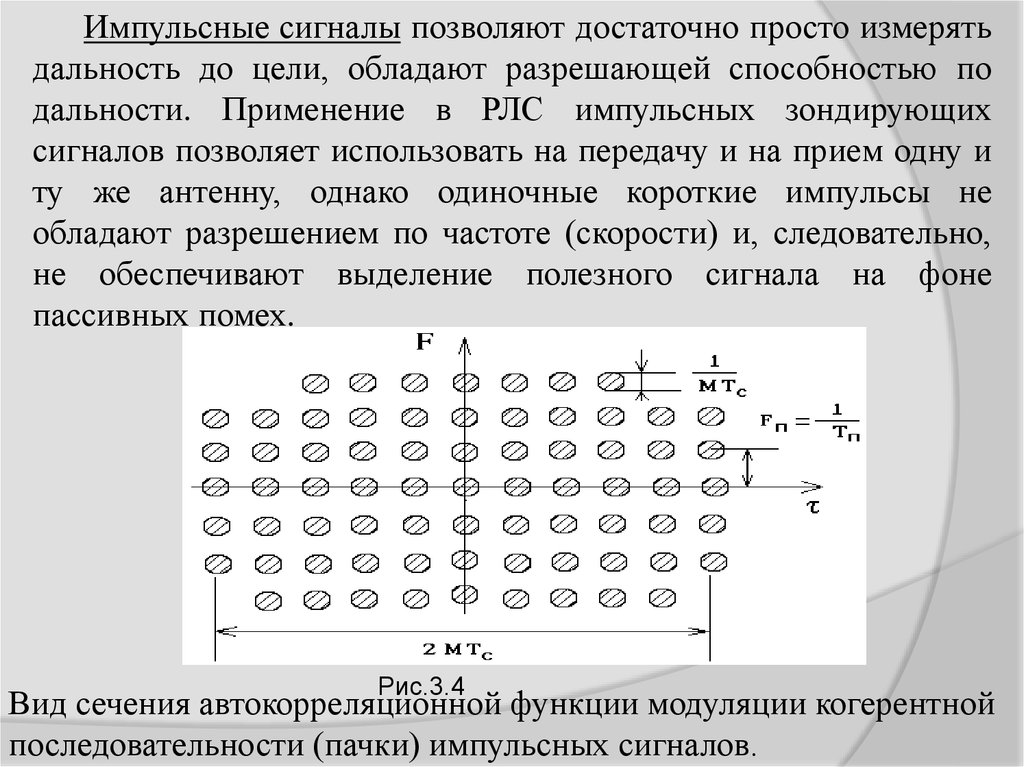
Хорошей разрешающей способностью одновременнопо дальности и скорости обладает когерентная
последовательность (пачка) импульсных сигналов.
Вид сечения автокорреляционной функции модуляции
такого сигнала горизонтальной плоскостью ( ,F) = 0,5
показан на рис.3.4.
В виду периодичности импульсов в пачке
автокорреляционная функция модуляции пачки также
имеет периодическую структуру по обеим осям ( и F),
причем период функции по оси равен периоду
следования импульсов Тп, а по оси частот F - частоте
следования импульсов Fп=1/Тп. Длительность одиночных
пиков по оси t обратно пропорциональна ширине спектра
одиночного импульса fи, а по оси F - обратно
пропорциональна длительности пачки Тпач = М.Тп, где М число импульсов в пачке.
55.
При применении когерентных пачек радиоимпульсоввозможны различные варианты построения
когерентно-импульсных РЛС:
-истинно когерентные РЛС (излучаются
когерентные последовательности радиоимпульсов);
-псевдокогерентные с эквивалентной внутренней
когерентностью (применяется когерентный
гетеродин, запоминающий фазу зондирующего сигнала
на период Тп);
-псевдокогерентные с внешней когерентностью
(используются сигналы, отраженные от
неподвижных объектов, в одном элементе разрешения
с движущейся целью).
56.
Импульсные сигналы позволяют достаточно просто измерятьдальность до цели, обладают разрешающей способностью по
дальности. Применение в РЛС импульсных зондирующих
сигналов позволяет использовать на передачу и на прием одну и
ту же антенну, однако одиночные короткие импульсы не
обладают разрешением по частоте (скорости) и, следовательно,
не обеспечивают выделение полезного сигнала на фоне
пассивных помех.
Рис.3.4
Вид сечения автокорреляционной функции модуляции когерентной
последовательности (пачки) импульсных сигналов.
57.
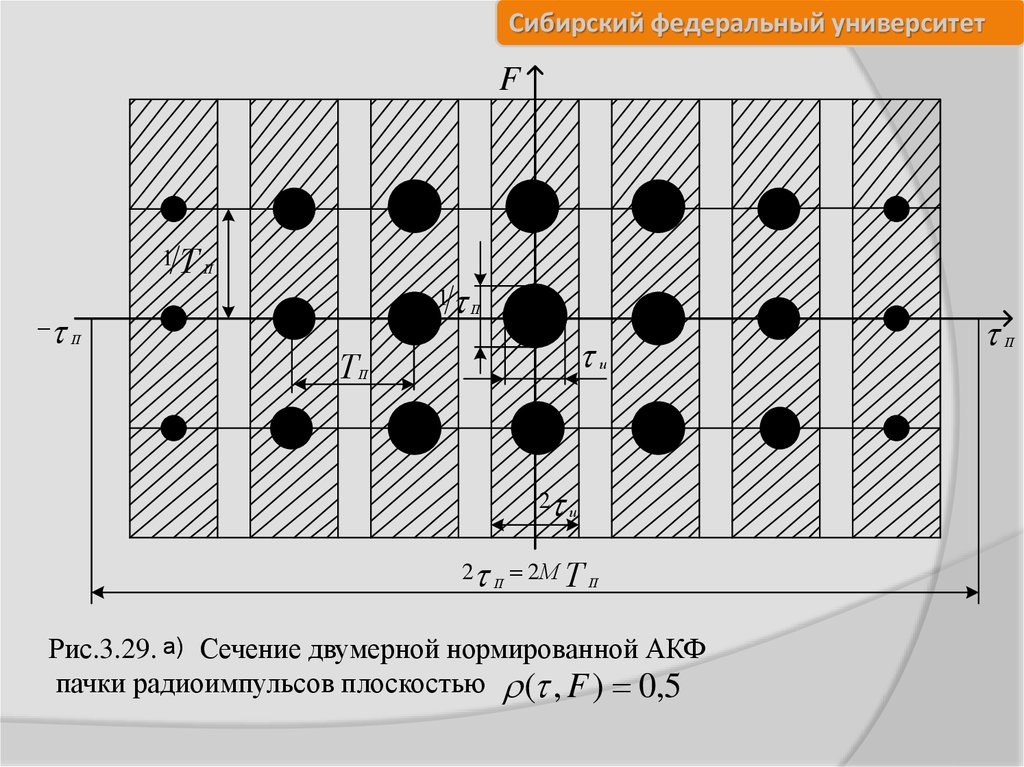
Сибирский федеральный университетF
1ТП
П
1 П
Т
П
и
2 и
2 П 2М Т П
Рис.3.29. а) Сечение двумерной нормированной АКФ
пачки радиоимпульсов плоскостью ( , F ) 0,5
П
58.
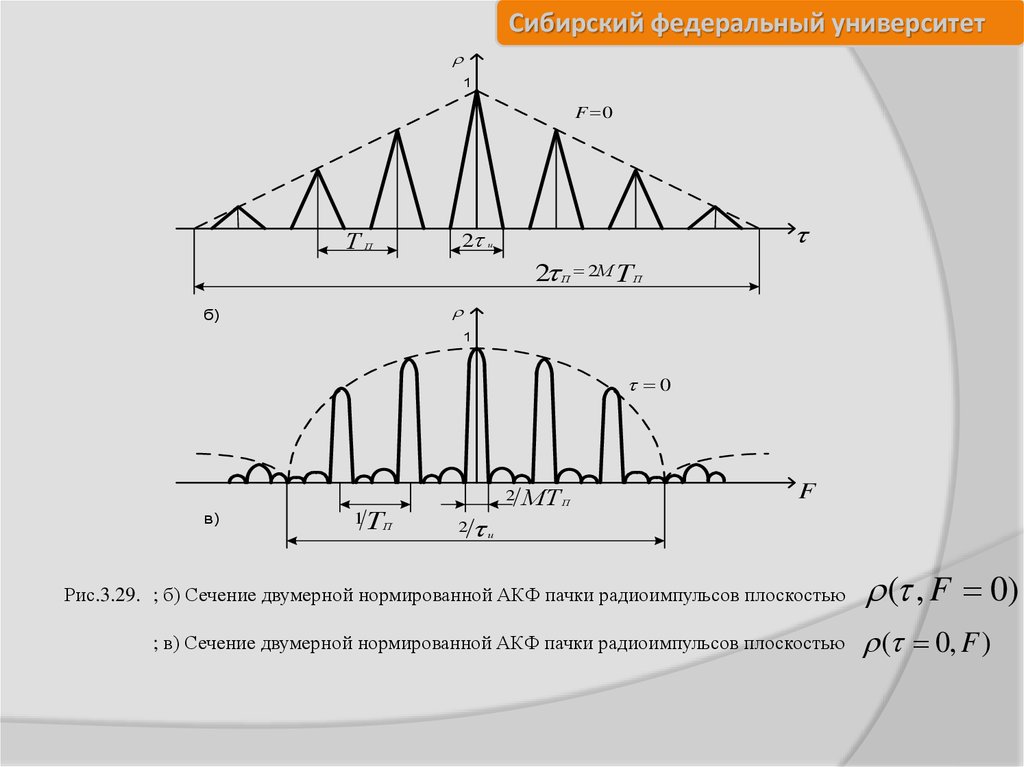
Сибирский федеральный университет1
F 0
Т
П
2
и
2
П
2М Т П
б)
1
0
2
в)
1 ТП
2
МТ
П
F
и
Рис.3.29. ; б) Сечение двумерной нормированной АКФ пачки радиоимпульсов плоскостью
; в) Сечение двумерной нормированной АКФ пачки радиоимпульсов плоскостью
( , F 0)
( 0, F )
59.
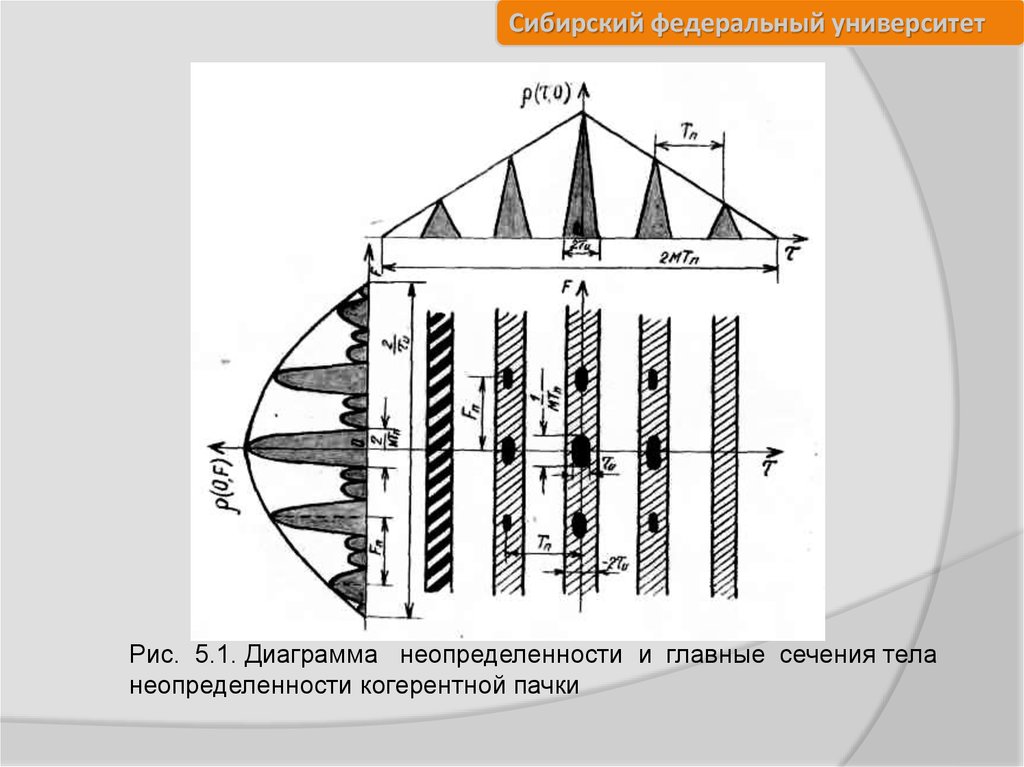
Сибирский федеральный университетРис. 5.1. Диаграмма неопределенности и главные сечения тела
неопределенности когерентной пачки
60.
Сибирский федеральный университетτ
F
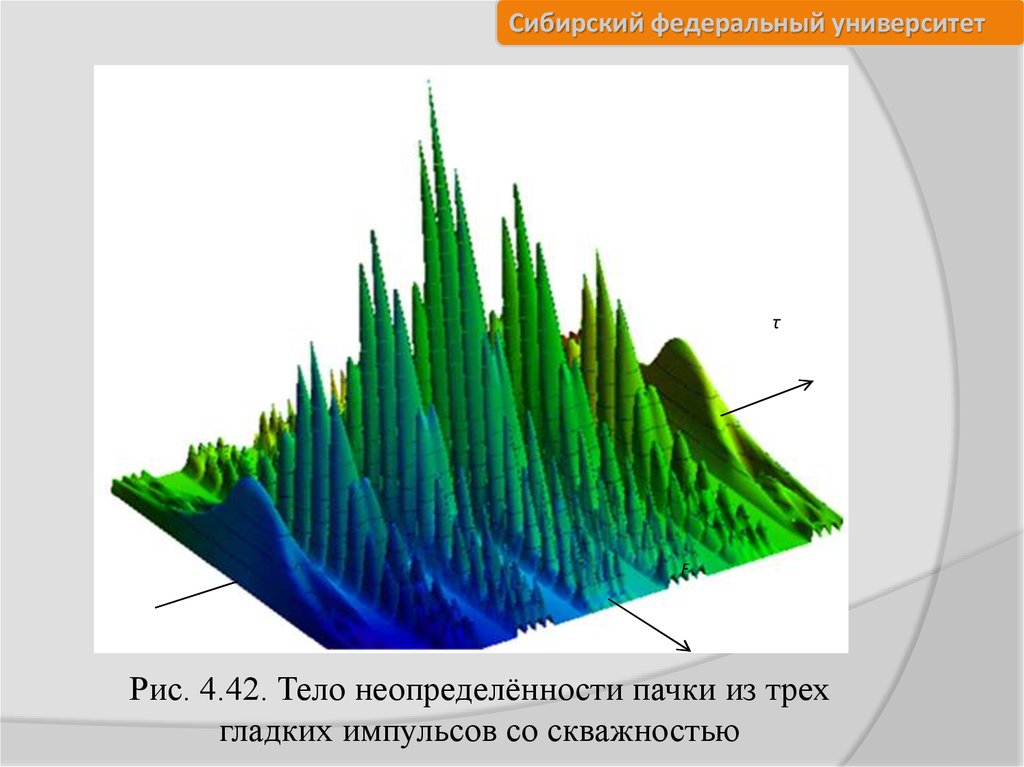
Рис. 4.42. Тело неопределённости пачки из трех
гладких импульсов со скважностью
61.
62.
Зондирующий сигнал и его спектр связаны междусобой парой преобразований Фурье: прямым, в
соответствии с которым осуществляется переход от
временного представления к частотному
(f ) x
( t )e
q
j2 ft
dt ,
и обратным, позволяющим перейти от частотного
представления сигнала к временному
(f )e
(t) q
х
j2 ft
df .
63.
При выборе достаточно больших ширины спектраодиночного импульса и длительности пачки можно обеспечить
высокую разрешающую способность по дальности и скорости
одновременно. Это свойство периодического импульсного сигнала
в сочетании с простотой его формирования и обработки является
его важным достоинством.
Периодичность автокорреляционной функции модуляции пачки
импульсов является недостатком такого сигнала, так как приводит к
неоднозначности измерения дальности и скорости цели, причем
устранить эту неоднозначность одновременно по обоим параметрам
не удается. Если для устранения неоднозначности измерения
дальности выбрать период следования импульсов большим, так,
чтобы он превышал время запаздывания сигнала от самой
удаленной цели (Тз>2Дмакс/с), то при этом будет существенно
проявляться неоднозначность измерения скорости.
64.
Если же, наоборот, выбрать высокой частоту следования, такчтобы она превышала максимально возможную доплеровскую
частоту сигнала Fп >FДмакс= 2.Vмакс/ , где Vмакс - максимально
возможная скорость движения цели, то при этом возникает
неоднозначность измерения дальности.
На практике в большинстве РЛС РТВ радиальную скорость цели
по параметрам отраженных сигналов не измеряют, поэтому период
следования импульсов в подавляющем большинстве случаев
выбирают из условия обеспечения однозначности измерения
дальности цели. Однако отказ от измерения радиальной скорости
цели
не
исключает
вредного
влияния
периодичности
автокорреляционной функции модуляции. Оно проявляется в
эффекте слепых скоростей, наглядное представление и котором
можно получить из рассмотрения структуры спектров полезного
сигнала и пассивной помехи при облучении цели и мешающих
отражателей пачкой когерентных радиоимпульсов.
65.
2.4.Влияние структур и параметров зондирующихрадиоимпульсов на защищенность РЛС от пассивных
помех
Пассивная помеха представляет собой отражения
зондирующего сигнала от объектов, не являющихся
радиолокационными целями. Поэтому пассивная помеха
(рассматриваемая в одном элементе разрешения РЛС) по своей
форме подобна полезному сигналу, что затрудняет выделение
сигнала из помехи. Увеличение энергии зондирующего, а
значит и принимаемого сигнала не может решить проблемы,
так как при этом во столько же раз возрастает и энергия
(мощность) пассивной помехи.
В обзорных РЛС для выделения сигнала на фоне пассивной
помехи можно использовать следующие отличия между
характеристиками пассивных помех и полезных сигналов:
пространственных; поляризационных; спектральных и др.
66.
Сибирский федеральный университетПовышение помехозащищенности РЛС в условиях
воздействия
маскирующих
пассивных
помех
(как
преднамеренных, так и непреднамеренных) при использовании
скоростной селекции достигается следующими методами:
повышением разрешающей способности по дальности и
скорости;
применением аппаратуры защиты от пассивных помех.
Сложная задача повышения защищенности пеpспективных РЛС
от пассивных помех до уpовня тpебуемой может быть pешена
лишь с помощью комплекса меpопpиятий, пpедусматpиваемых
пpи их пpоектиpовании (выбоpе пpинципов постpоения и
паpаметpов РЛС) и обеспечивающих:
-уменьшение мощности помехи на входе пpиемника;
-сужение спектpа флюктуаций помехи;
-оптимизацию системы обpаботки сигналов на фоне
пассивных помех.
67.
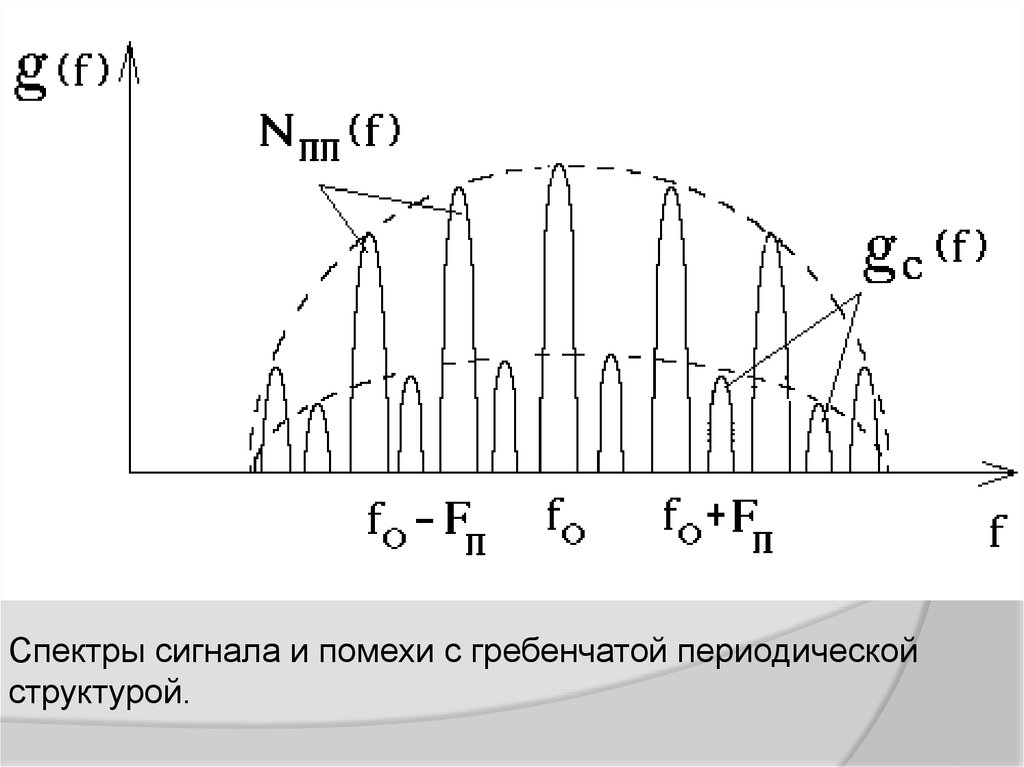
Спектры сигнала и помехи имеют гребенчатуюпериодическую структуру с интервалом между соседними
гребнями, равными Fп. Ширина отдельных гребней обратно
пропорциональна длительности пачки. Общая ширина спектра
определяется шириной спектра одиночного импульса в пачке
(рис.3.5).
При различии доплеровских частот сигнала и помехи и
малой ширине гребня спектра (большая длительность пачки)
возможно путем частотной селекции выделение полезного
сигнала на фоне одновременно с ним принятой пассивной
помехи. Однако возможны такие значения радиальной скорости
движения цели, при которых разность доплеровских смещений
частоты сигнала и помехи будет кратна частоте следования РЛС
(FДс - FДп = к.Fп, где к = 0,1,2,...).
68.
S fN ПП f
SС f
f
f З FП
fЗ
f З FП
Рис.3.5. Разделение спектров сигнала
и пассивной помехи
69.
Приэтом
спектры
сигнала
и
помехи
перекрываются и обнаружение сигнала на фоне
интенсивной
пассивной
помехи
становится
невозможным. Этот эффект и носит название эффекта
"слепых" скоростей.
С
указанным
недостатком
импульсных
периодических сигналов приходится мириться. Для
ослабления
эффекта
"слепых"
скоростей
в
когерентно-импульсных РЛС применяют сигналы с
переменной частотой посылок.
70.
Одновременная работа РЛС на нескольких несущихчастотах может быть использована также для борьбы
со "слепыми" скоростями при работе в пассивных
помехах. При этом частоты должны быть выбраны так,
чтобы соответствующие им слепые скорости
VРсл = k. i/2.Tп , (к = 1, 2, ...)
не совпадали в диапазоне возможных скоростей
полета
воздушных
объектов.
Естественно,
использование в РЛС большого числа частотных
каналов вызовет ее существенное усложнение. При
использовании двухчастотного сигнала выигрыш в
пороговом сигнале по сравнению с одночастотным
близок к максимально возможному.
71.
Спектры сигнала и помехи с гребенчатой периодическойструктурой.
72.
Таким образом, для выделения полезного сигнала на фонепассивной помехи путем частотной (скоростной) селекции
необходимо применять сигналы большой длительности с
таким расчетом, чтобы ширина пика функции r(0,F) была
меньше разности доплеровских смещений частот сигнала и
пассивной помехи. Длинные сигналы приемлемы и с точки
зрения их выделения на фоне АШП, так как при длинном
сигнале можно получить требуемую энергию и при невысокой
импульсной мощности.
Следовательно, для повышения точности измерения
угловой координаты необходимо, как и в предыдущих случаях,
увеличивать отношение "сигнал/шум«- q »на выходе
оптимального фильтра, а кроме того, сужать диаграмму
направленности антенны. При фиксированных размерах
антенны это достигается уменьшением длины волны.
73.
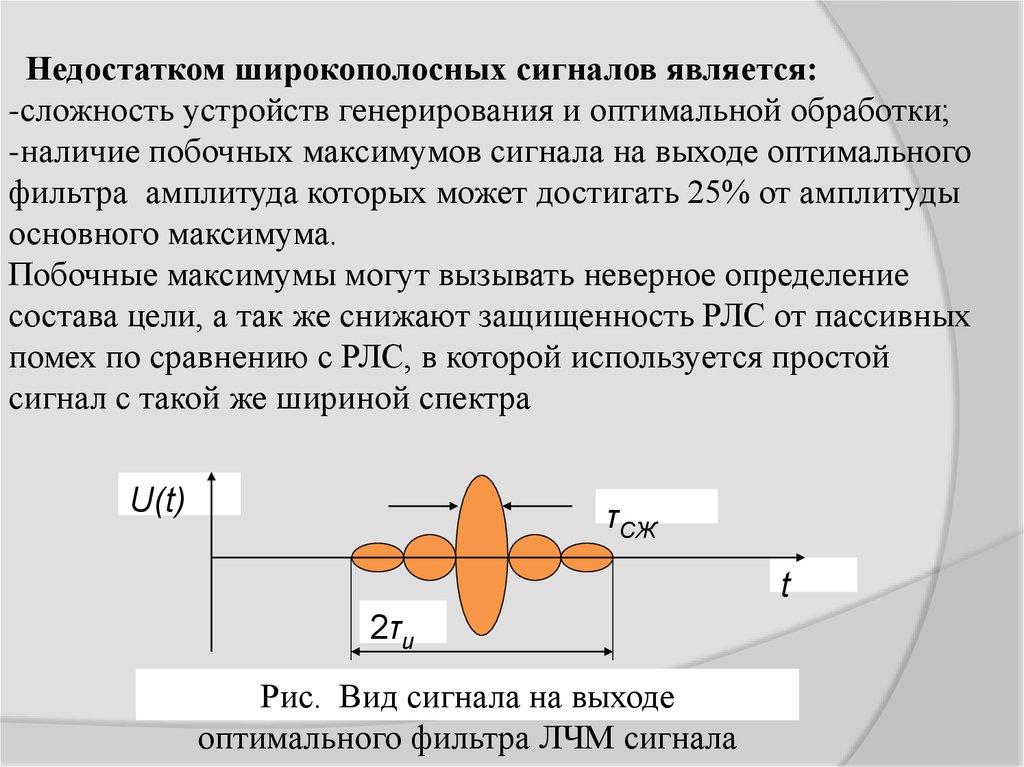
Недостатком широкополосных сигналов является:-сложность устройств генерирования и оптимальной обработки;
-наличие побочных максимумов сигнала на выходе оптимального
фильтра амплитуда которых может достигать 25% от амплитуды
основного максимума.
Побочные максимумы могут вызывать неверное определение
состава цели, а так же снижают защищенность РЛС от пассивных
помех по сравнению с РЛС, в которой используется простой
сигнал с такой же шириной спектра
U(t)
τСЖ
t
2τи
Рис. Вид сигнала на выходе
оптимального фильтра ЛЧМ сигнала
74.
Действительно,боковые
пики
сигнала
от
отражателей, расположенных в соседних с целью
разрешаемых объемах, складываясь в окрестности
полезного сигнала с основным пиком помехи,
увеличивают ее суммарную мощность и тем самым
ухудшают отношение сигнал/помеха. Устраняют
боковые пики с помощью весовой обработки
(сглаживания) спектра в приемнике, что ведет к
энергетическим потерям 2-3 дБ.
С этой точки зрения в РЛС с небольшой дальностью
обнаружения, где не требуется большой потенциал
целесообразно применять не сложно модулированные
сигналы, а короткие простые импульсы, которые на
выходе оптимального фильтра не образуют побочных
максимумов.
75.
76.
77.
Сибирский федеральный университетτ
F
Рис.4.39. Тело неопределённости ЛЧМ
радиоимпульса
78.
79.
80.
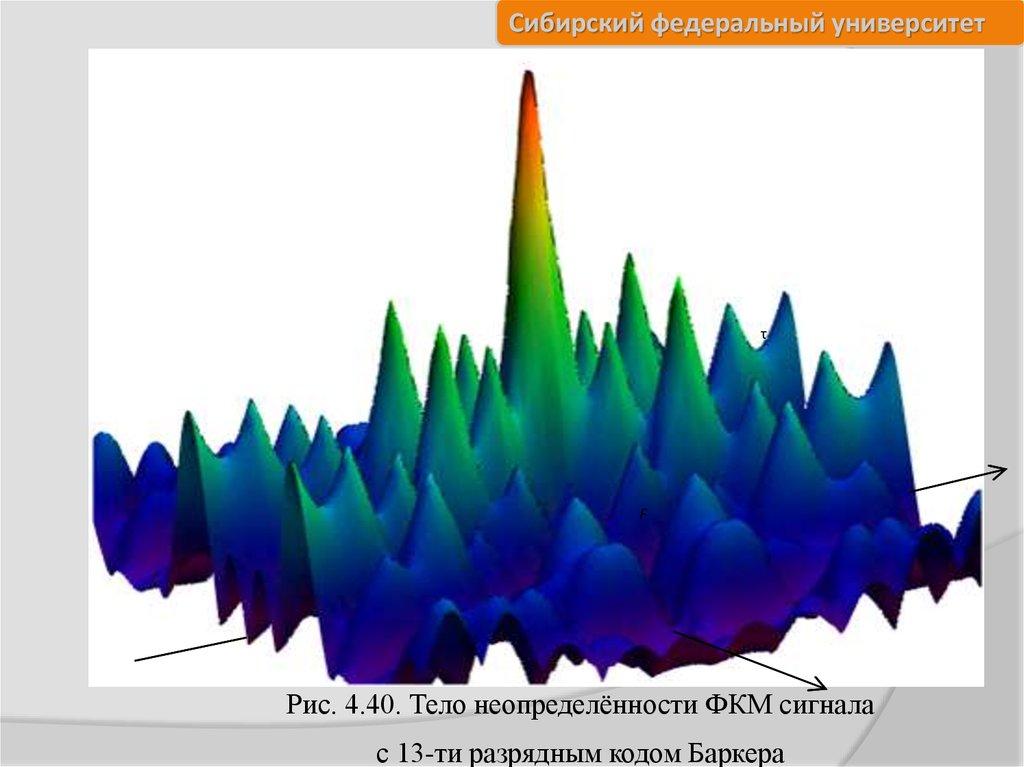
Сибирский федеральный университетτ
F
Рис. 4.40. Тело неопределённости ФКМ сигнала
с 13-ти разрядным кодом Баркера
81.
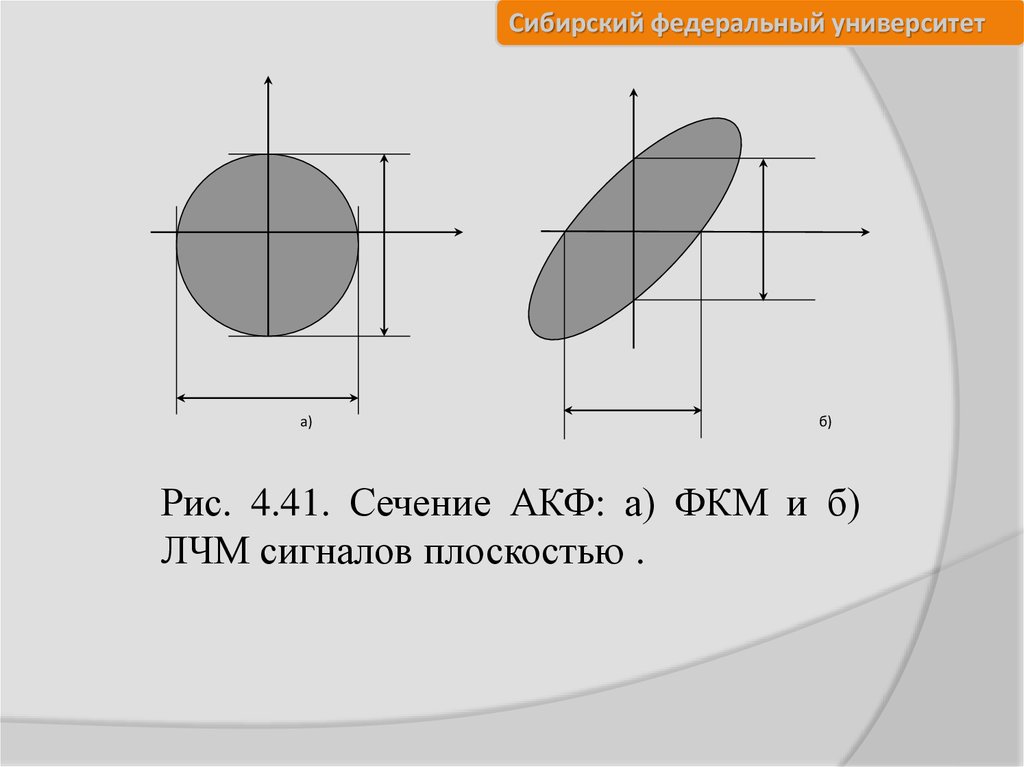
Сибирский федеральный университета)
б)
Рис. 4.41. Сечение АКФ: а) ФКМ и б)
ЛЧМ сигналов плоскостью .
82.
2.5.Влияние параметров зондирующего сигналана защищенность РЛС от активных шумовых
помех
Из теории обнаружения известно, что вероятность
правильного обнаружения сигнала D при фиксированной
вероятности ложной тревоги F на фоне внешних шумовых
помех или внутренних шумов приемника (а, следовательно,
дальность обнаружения цели с заданной вероятностью при
воздействии шумовых помех) не зависит от формы сигнала и
определяется лишь отношением удвоенной энергии
принятого сигнала Эпр к спектральной плотности
шума Nо, то есть параметром обнаружения q2.
Таким образом, при Nо = const, с точки зрения обеспечения
защищенности РЛС от шумовых помех, любые сигналы
равноценны, необходимо лишь обеспечить большую энергию
принимаемого сигнала.
83.
Выводы.Проведенный выше анализ показывает, что структуры и
параметры зондирующих сигналов оказывают существенное
влияние на тактико-технические характеристики РЛС, причем
это влияние на различные характеристики неоднозначно.
•Для повышения дальности действия РЛС, точности измерения
координат и скорости необходимо увеличивать энергию
принимаемого сигнала, для чего при фиксированной
импульсной мощности требуется увеличивать его длительность
и длительность пачки эхо-сигналов.
•Для повышения разрешающей способности по дальности
следует увеличивать ширину спектра радиоимпульса, а по
скорости – его длительность. Одновременное разрешение по
дальности и по скорости (по частоте Доплера) возможно на
основе применения широкополосных (сложных)
радиоимпульсов.
84.
•Помехозащищенность РЛС от активныхпомех зависит от энергии принимаемых
сигналов, для чего необходимо использовать
широкополосные сигналы, а так же от
возможности РЛС оперативно изменять
такие параметры сигнала, как несущая
частота и поляризация.
•Для обеспечения помехозащищенности РЛС
от пассивных помех на основе применения
систем СДЦ необходимо использование
когерентной последовательности
радиоимпульсов.
85.
ЗАКЛЮЧЕНИЕ1. Для решения задач РЛ применяются различные виды ЗС:
импульсные, непрерывные, с внутриимпульсной
модуляцией и без таковой, одиночные и пачечные.
2.Конкретный вид используемого сигнала определяется
требованиями к качеству решения задач РЛ и,
соответственно, требованиями к характеристикам РЛС.
3. К основным характеристикам зондирующих сигналов
относятся: закон модуляции, длительность, мощность и
энергия, АКФ, время корреляции, энергетический
спектр, ширина спектра, которые и определяют ТТХ
РЛС.
4.Эти характеристики различны для конкретных видов ЗС и
во многом будут определять структуру устройств
обработки радиолокационных сигналов.
5. Основными широкополосными сигналами,
применяемыми в РЛС являются ЛЧМ и ФКМ
радиоимпульсы.
86.
Вопросы на групповое занятие.1)Виды помех и способы их создания.
2)Классификация помех?
3).Анализ защищённости РЛС от шумовых
помех.
4).Технические методы защиты от АП.
Раскрыть суть защиты методом силовой
борьбы?
5).Защита от АШП с помощью метода
частотной селекции?
6).Метод поляризационной селекции.Как с
помощью данного метода осуществляется
защита от АП ?