

 Физика
ФизикаПохожие презентации:



")


")



Доплеровские лаги
1.
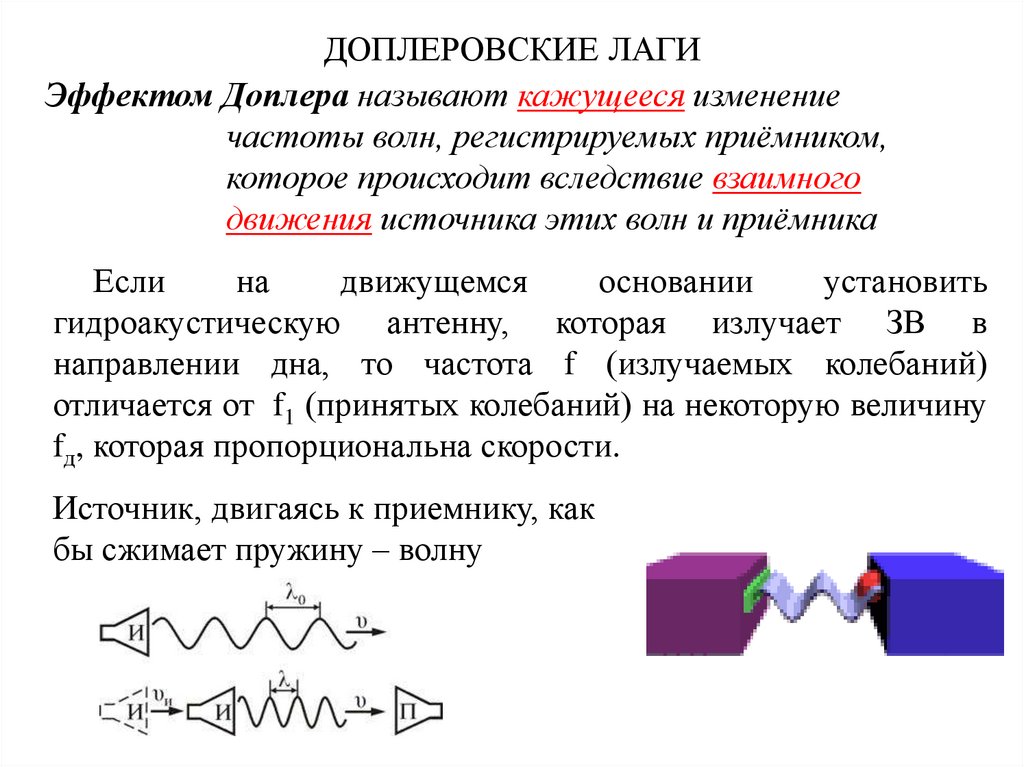
ДОПЛЕРОВСКИЕ ЛАГИЭффектом Доплера называют кажущееся изменение
частоты волн, регистрируемых приёмником,
которое происходит вследствие взаимного
движения источника этих волн и приёмника
Если
на
движущемся
основании
установить
гидроакустическую антенну, которая излучает ЗВ в
направлении дна, то частота f (излучаемых колебаний)
отличается от f1 (принятых колебаний) на некоторую величину
fд, которая пропорциональна скорости.
Источник, двигаясь к приемнику, как
бы сжимает пружину – волну
2.
3.
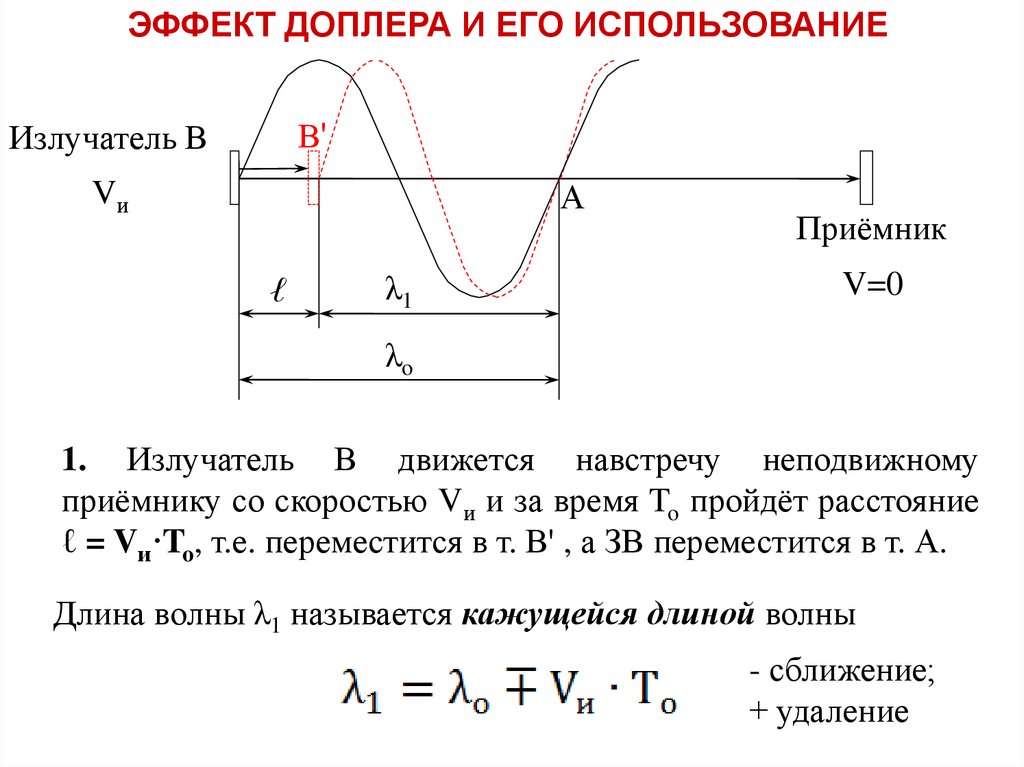
ЭФФЕКТ ДОПЛЕРА И ЕГО ИСПОЛЬЗОВАНИЕВ'
Излучатель В
А
Vи
ℓ
λ1
Приёмник
V=0
λo
1. Излучатель В движется навстречу неподвижному
приёмнику со скоростью Vи и за время To пройдёт расстояние
ℓ = Vи·To, т.е. переместится в т. В' , а ЗВ переместится в т. А.
Длина волны λ1 называется кажущейся длиной волны
- сближение;
+ удаление
4.
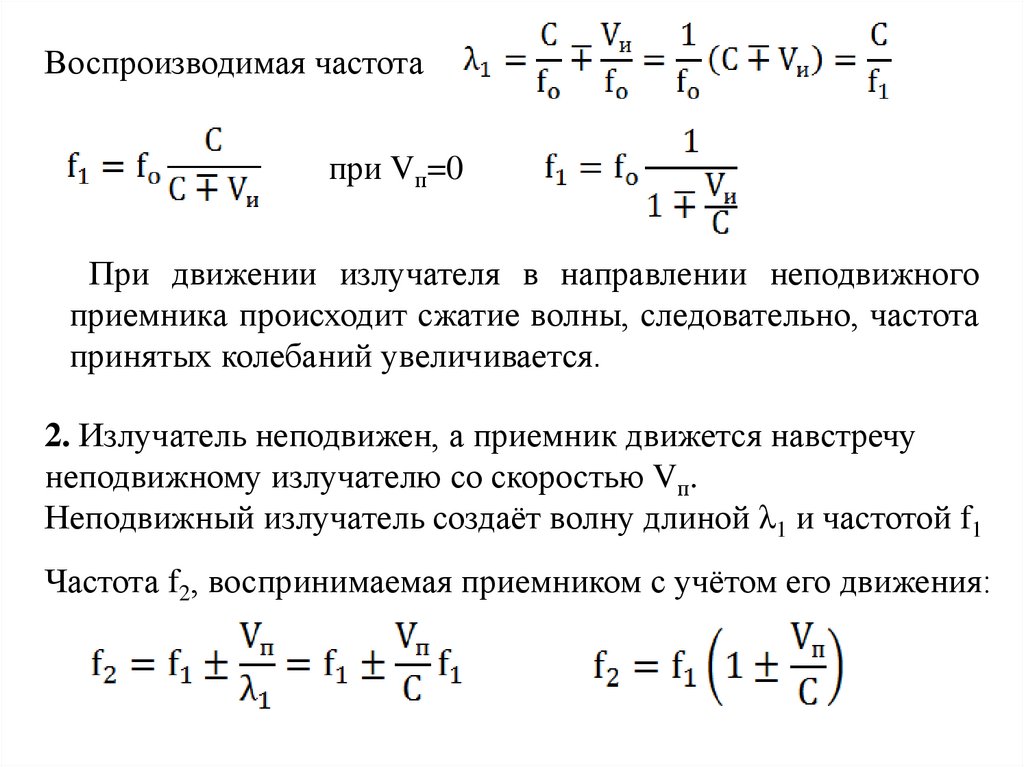
Воспроизводимая частотапри Vп=0
При движении излучателя в направлении неподвижного
приемника происходит сжатие волны, следовательно, частота
принятых колебаний увеличивается.
2. Излучатель неподвижен, а приемник движется навстречу
неподвижному излучателю со скоростью Vп.
Неподвижный излучатель создаёт волну длиной λ1 и частотой f1
Частота f2, воспринимаемая приемником с учётом его движения:
5.
Излучатель и приемник движутся, частота принятыхколебаний f3
6.
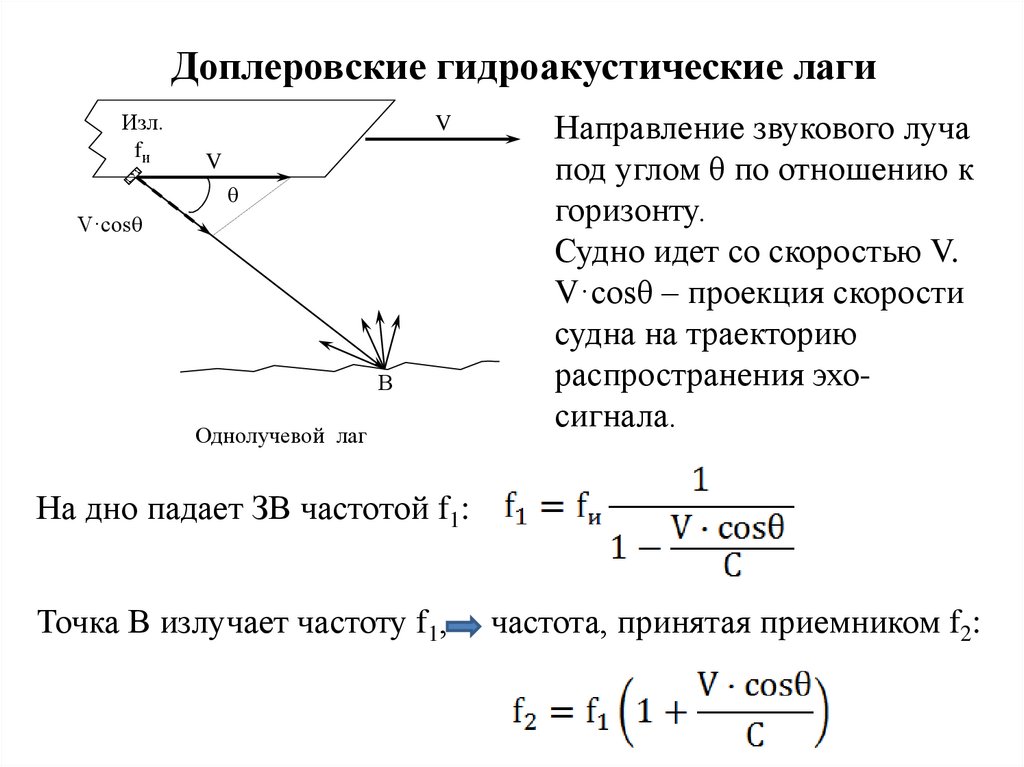
Доплеровские гидроакустические лагиИзл.
fи
V
V
θ
V·cosθ
В
Однолучевой лаг
Направление звукового луча
под углом θ по отношению к
горизонту.
Судно идет со скоростью V.
V·cosθ – проекция скорости
судна на траекторию
распространения эхосигнала.
На дно падает ЗВ частотой f1:
Точка В излучает частоту f1,
частота, принятая приемником f2:
7.
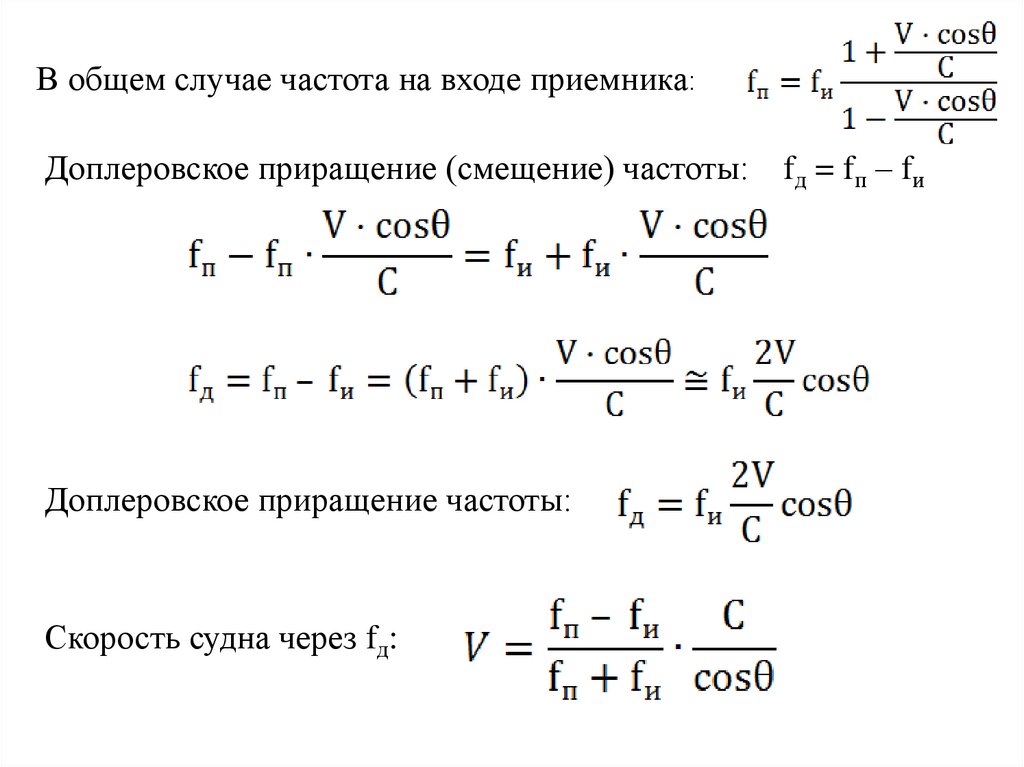
В общем случае частота на входе приемника:Доплеровское приращение (смещение) частоты:
Доплеровское приращение частоты:
Скорость судна через fд:
fд = fп – fи
8.
Блок-схема однолучевого доплеровского лагаVлаг
Кс
Источник
энергии
Корректор
Vтечения
Индикатор
Vс
Вычислитель
Интегратор
"С"
Генератор
fп
Измеритель
fд=fп–fи
Коммутатор
Усилитель
>
Приемопередающая
антенна
ЗУ
∫
Индикатор
пройденного
расстояния S
9.
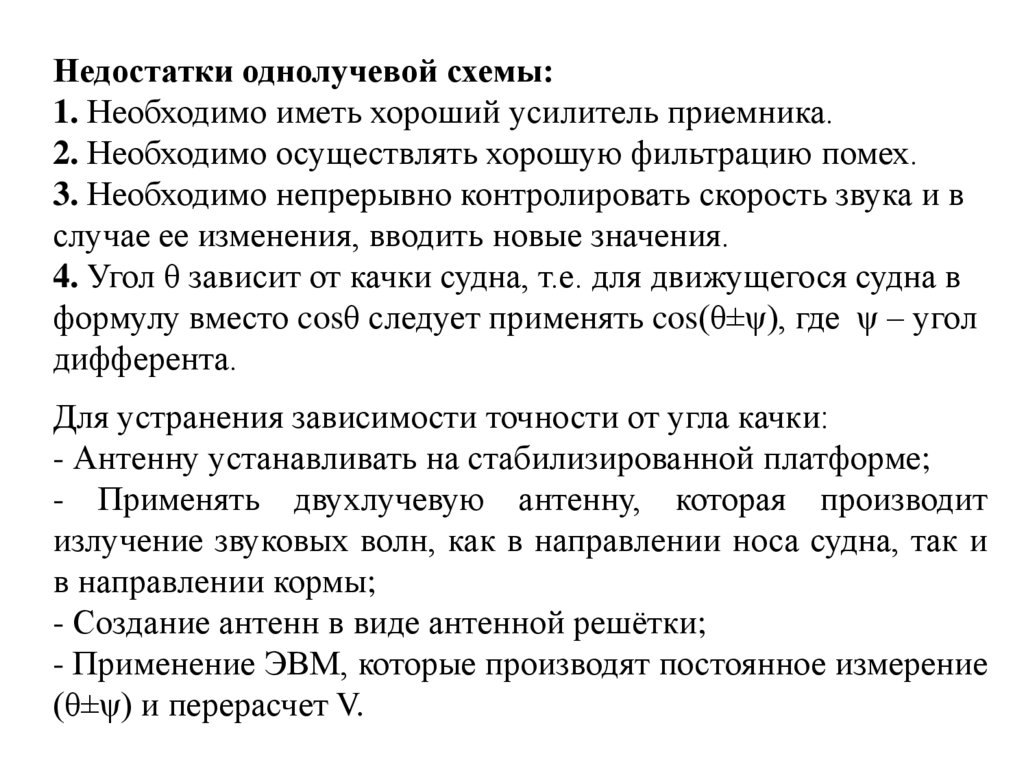
Недостатки однолучевой схемы:1. Необходимо иметь хороший усилитель приемника.
2. Необходимо осуществлять хорошую фильтрацию помех.
3. Необходимо непрерывно контролировать скорость звука и в
случае ее изменения, вводить новые значения.
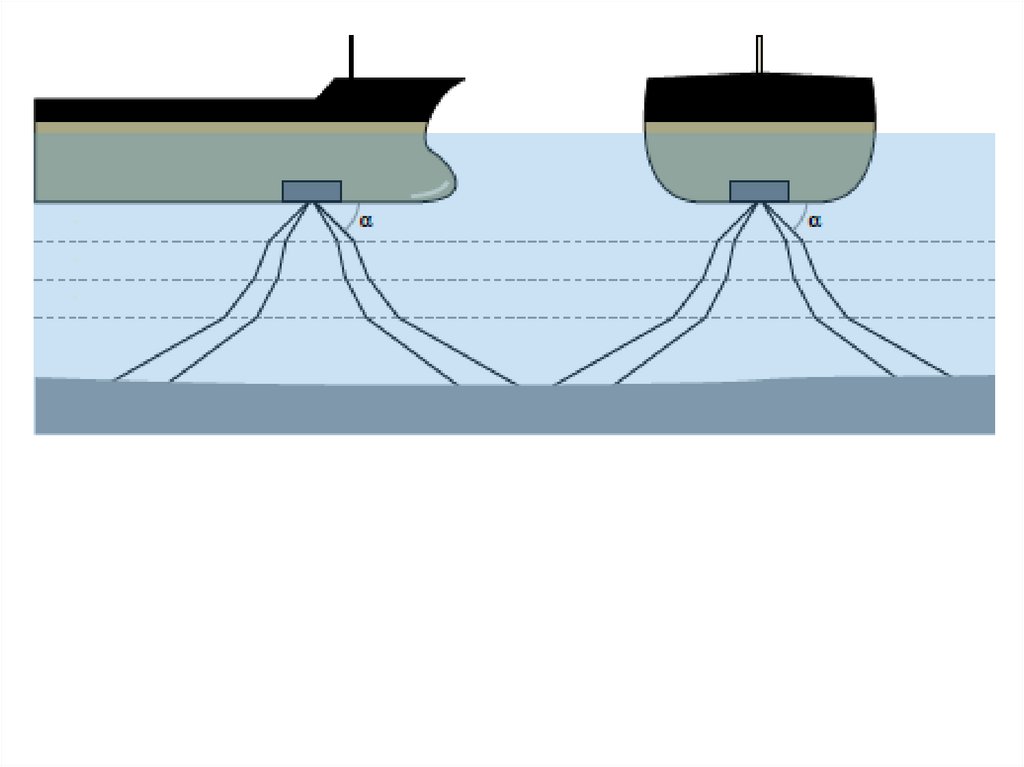
4. Угол θ зависит от качки судна, т.е. для движущегося судна в
формулу вместо cosθ следует применять cos(θ±ψ), где ψ – угол
дифферента.
Для устранения зависимости точности от угла качки:
- Антенну устанавливать на стабилизированной платформе;
- Применять двухлучевую антенну, которая производит
излучение звуковых волн, как в направлении носа судна, так и
в направлении кормы;
- Создание антенн в виде антенной решётки;
- Применение ЭВМ, которые производят постоянное измерение
(θ±ψ) и перерасчет V.
10.
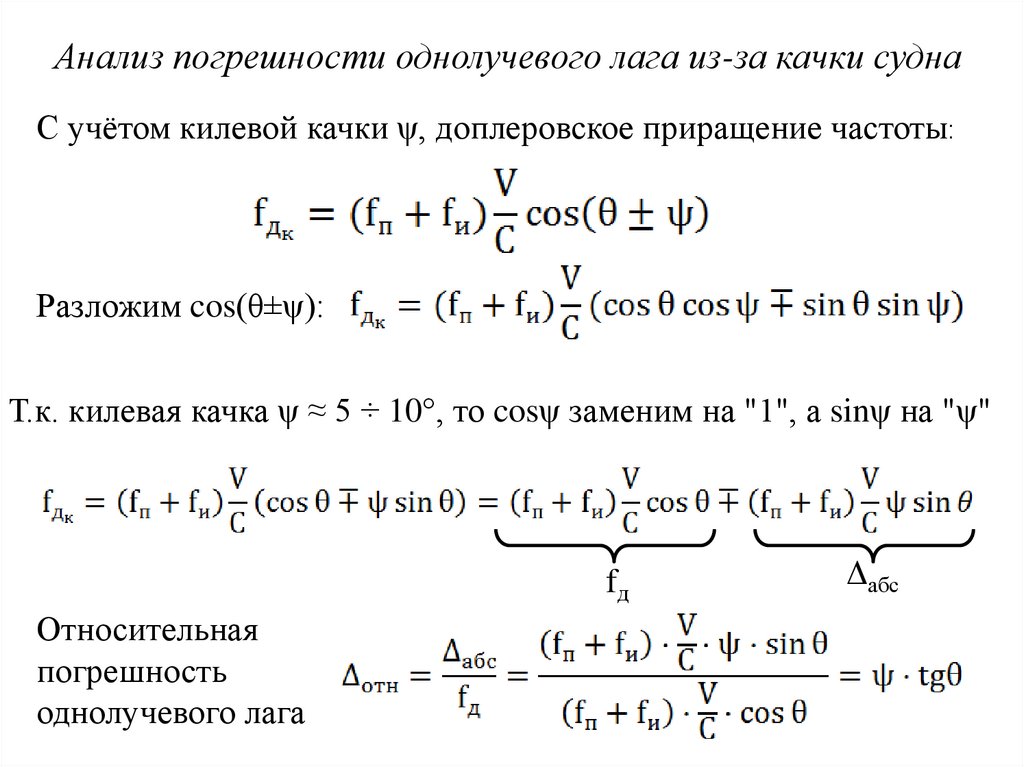
Анализ погрешности однолучевого лага из-за качки суднаС учётом килевой качки ψ, доплеровское приращение частоты:
Разложим cos(θ±ψ):
Т.к. килевая качка ψ ≈ 5 ÷ 10°, то cosψ заменим на "1", а sinψ на "ψ"
fд
Относительная
погрешность
однолучевого лага
Δабс
11.
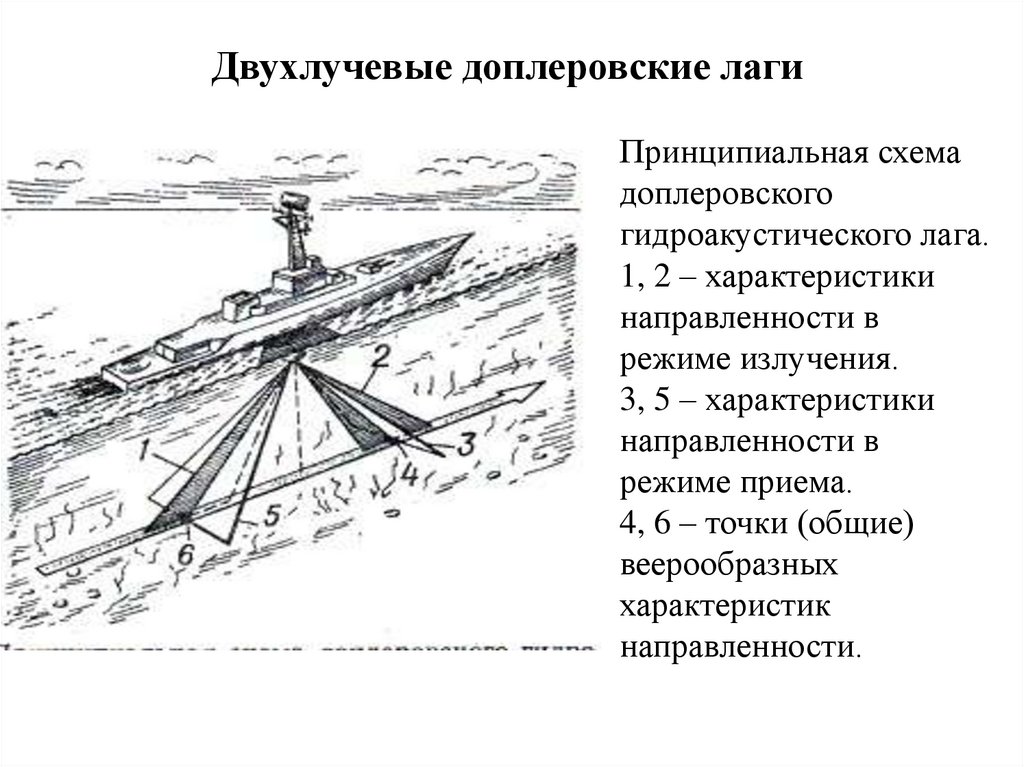
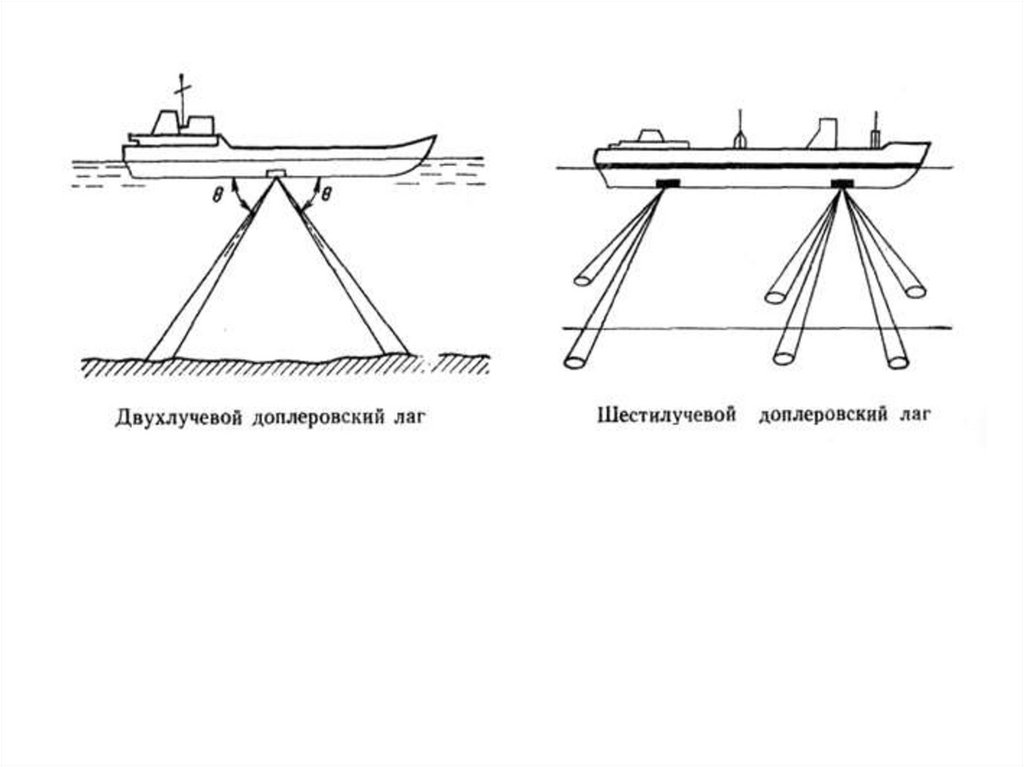
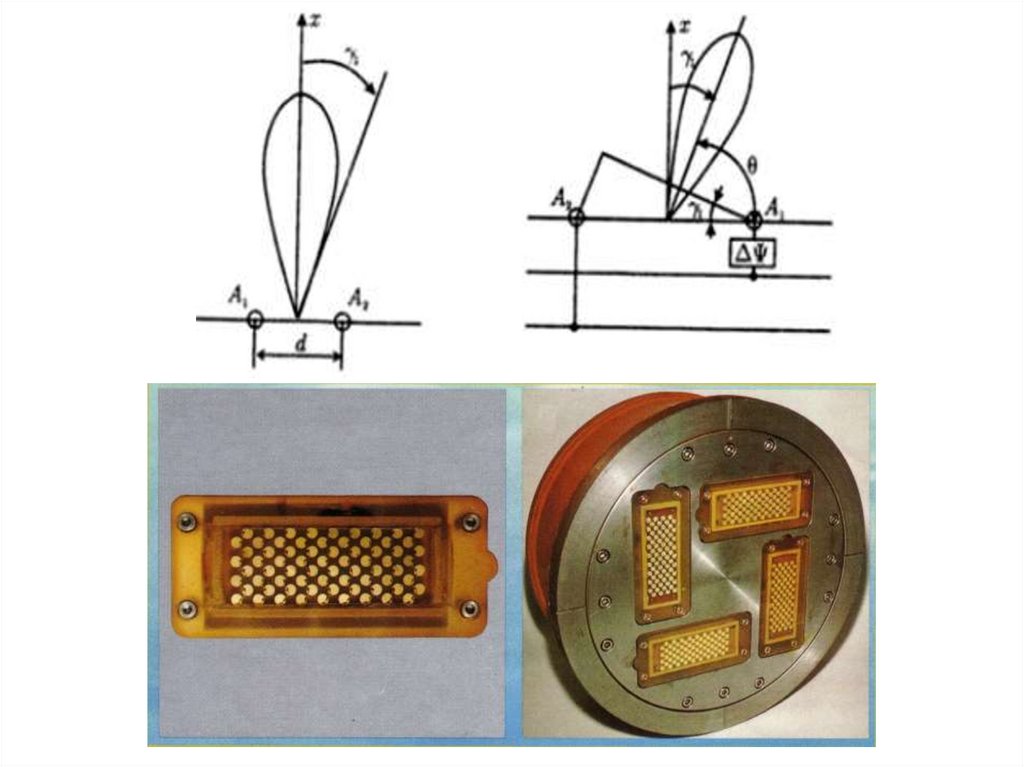
Двухлучевые доплеровские лагиПринципиальная схема
доплеровского
гидроакустического лага.
1, 2 – характеристики
направленности в
режиме излучения.
3, 5 – характеристики
направленности в
режиме приема.
4, 6 – точки (общие)
веерообразных
характеристик
направленности.
12.
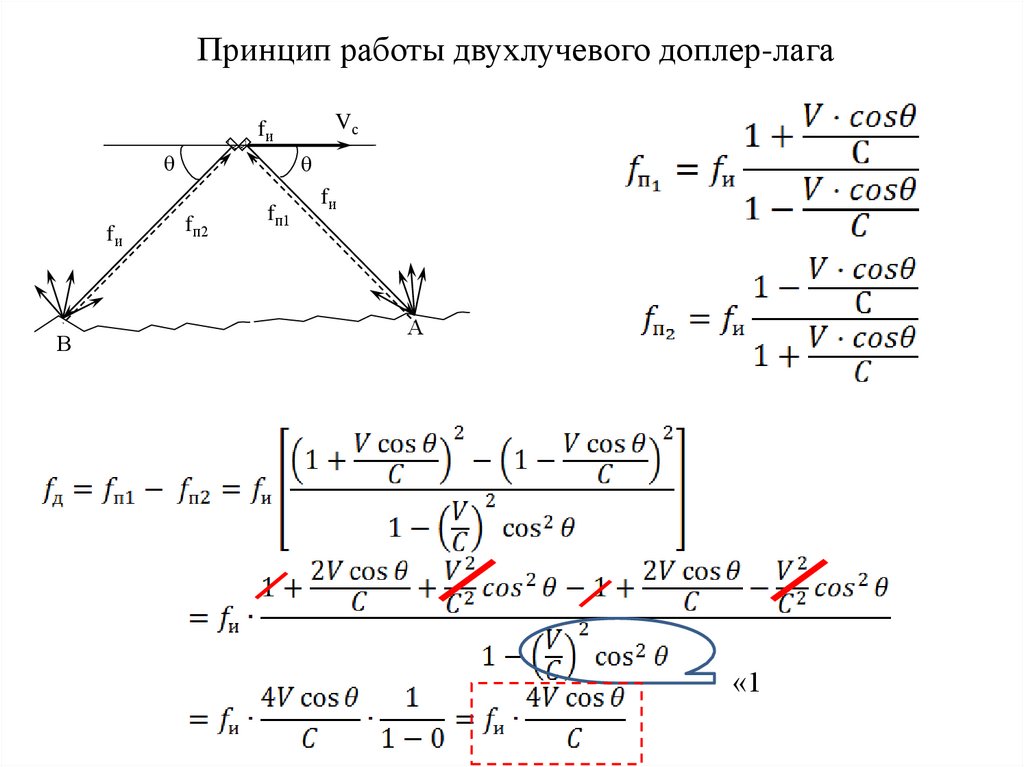
Принцип работы двухлучевого доплер-лагаVс
fи
θ
fи
В
θ
fп2
fп1
fи
А
«1
13.
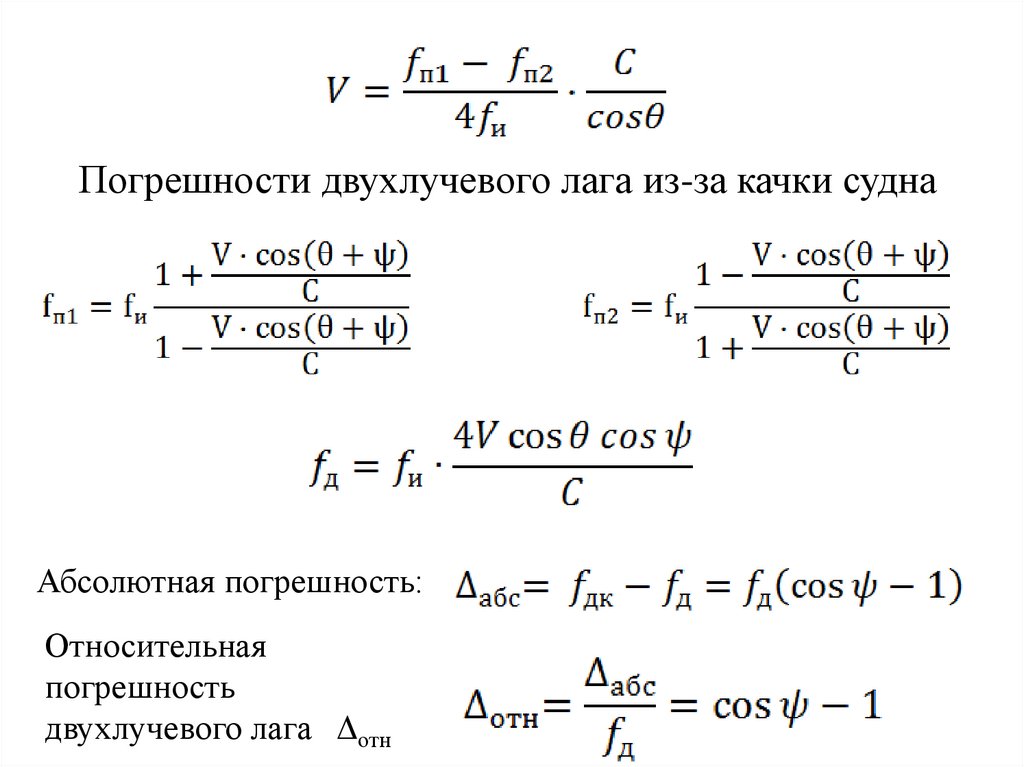
Погрешности двухлучевого лага из-за качки суднаАбсолютная погрешность:
Относительная
погрешность
двухлучевого лага Δотн
14.
15.
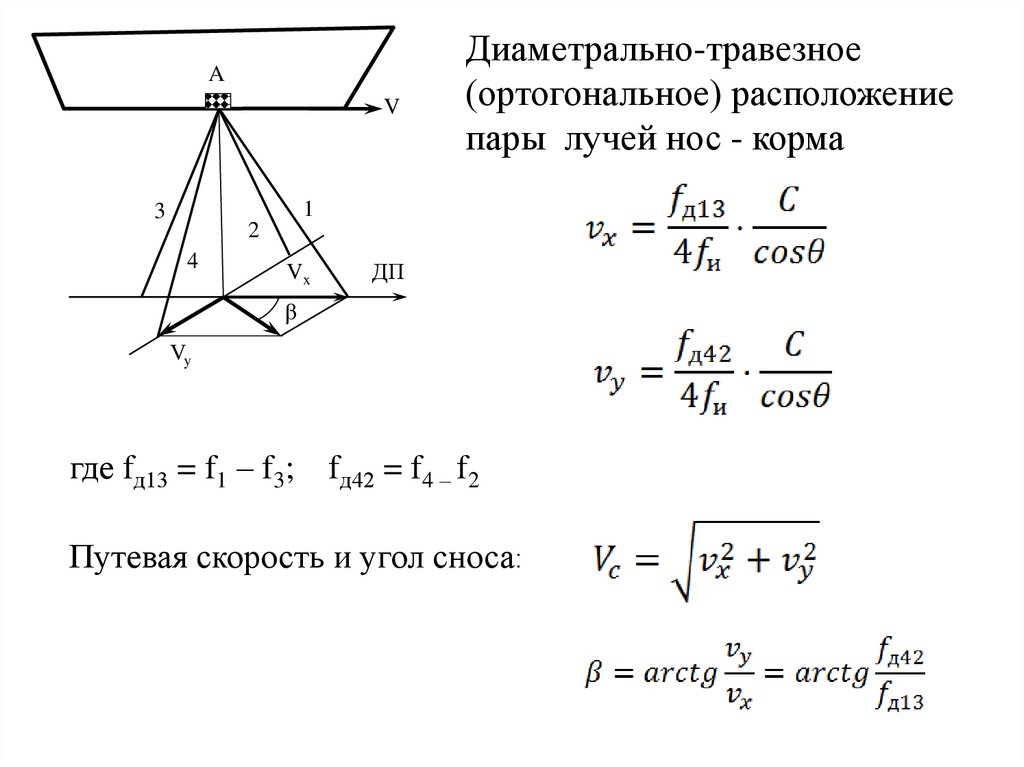
AV
Диаметрально-травезное
(ортогональное) расположение
пары лучей нос - корма
1
3
2
4
Vx
ДП
β
Vy
где fд13 = f1 – f3; fд42 = f4 – f2
Путевая скорость и угол сноса:
16.
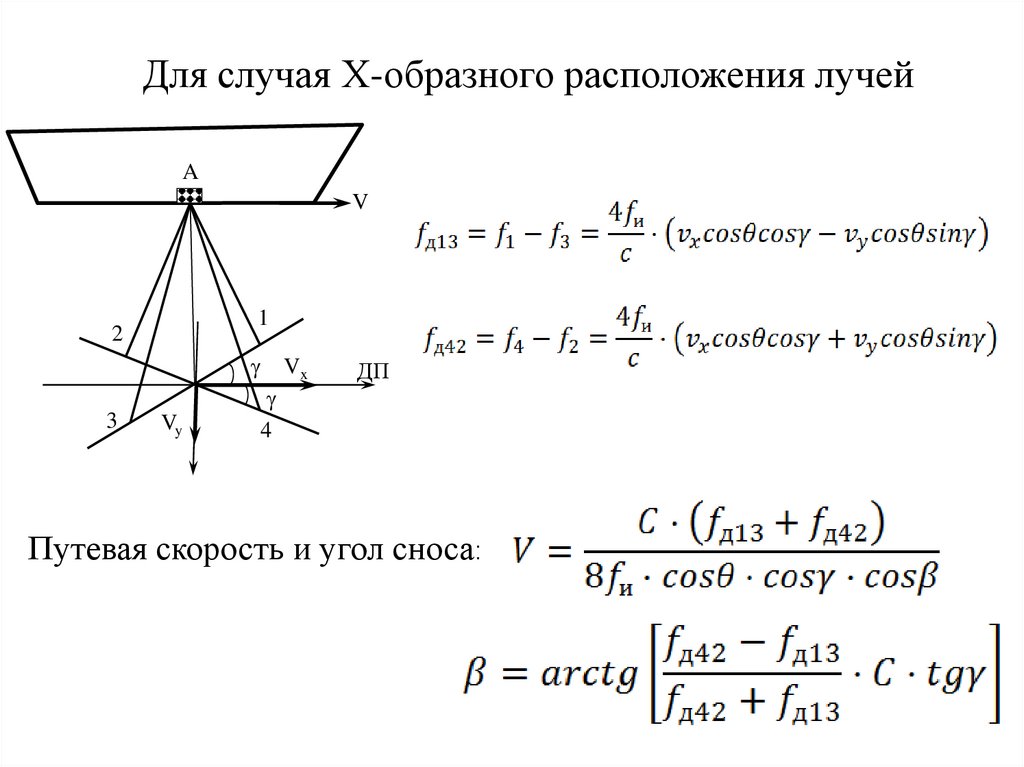
Для случая Х-образного расположения лучейA
V
1
2
γ
3
Vy
Vx
ДП
γ
4
Путевая скорость и угол сноса:
17.
Гидроакустические антенны 4-х лучевогодоплеровского лага
18.
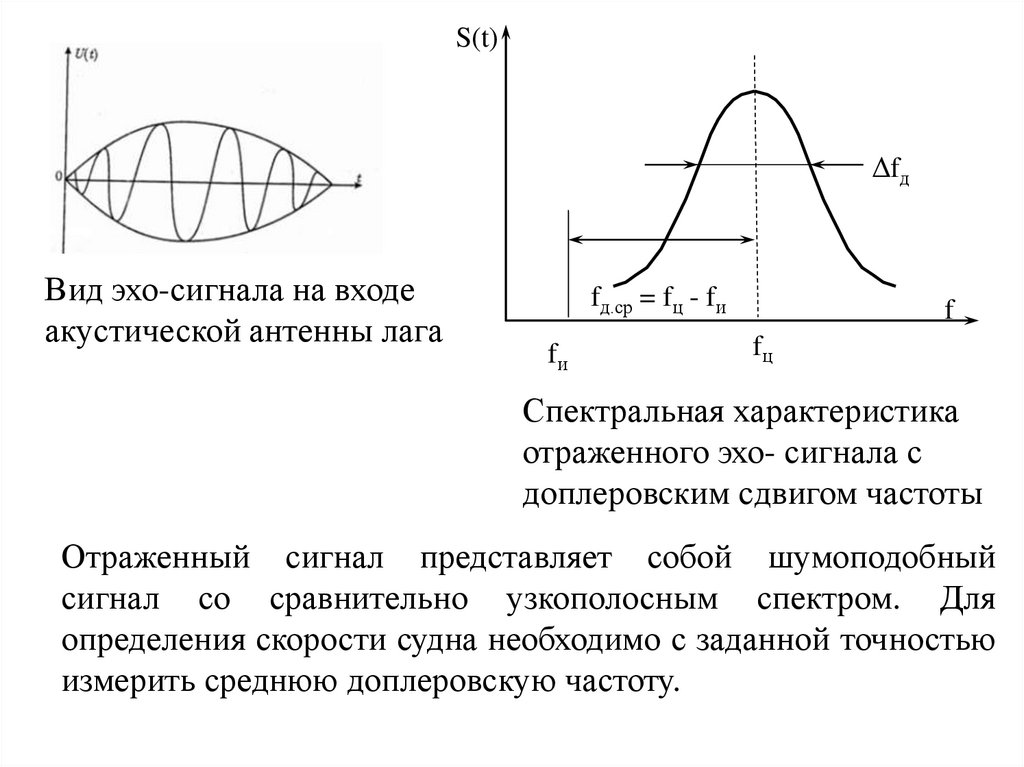
S(t)Δfд
Вид эхо-сигнала на входе
акустической антенны лага
fд.ср = fц - fи
fи
f
fц
Спектральная характеристика
отраженного эхо- сигнала с
доплеровским сдвигом частоты
Отраженный сигнал представляет собой шумоподобный
сигнал со сравнительно узкополосным спектром. Для
определения скорости судна необходимо с заданной точностью
измерить среднюю доплеровскую частоту.
19.
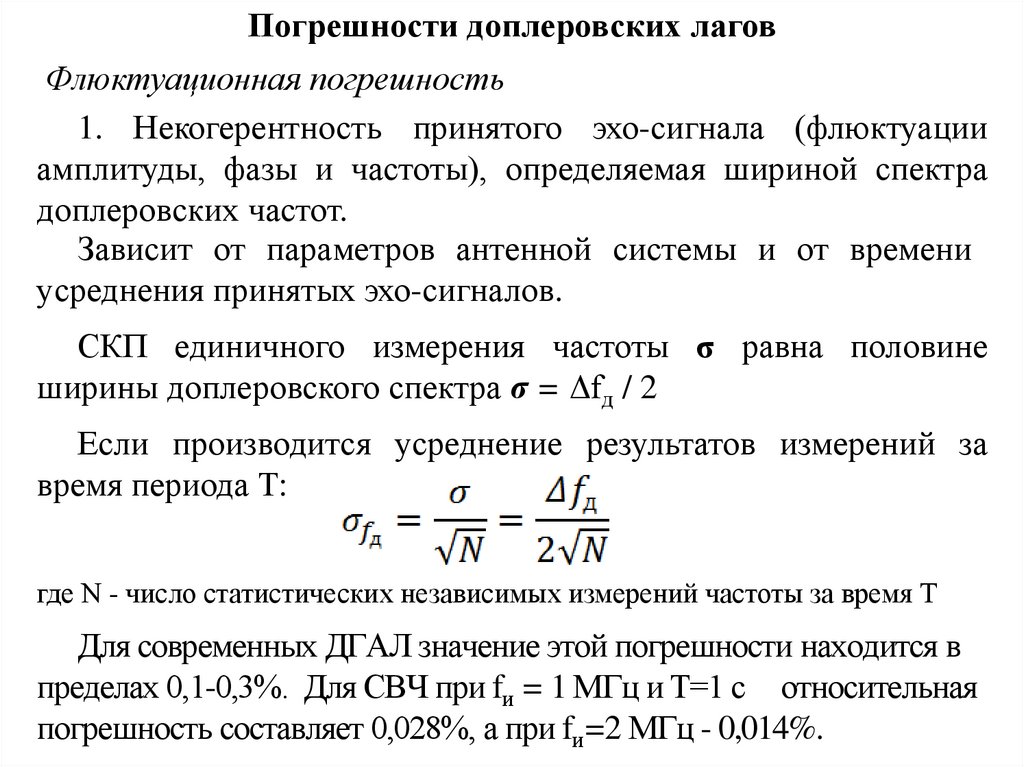
Погрешности доплеровских лаговФлюктуационная погрешность
1. Некогерентность принятого эхо-сигнала (флюктуации
амплитуды, фазы и частоты), определяемая шириной спектра
доплеровских частот.
Зависит от параметров антенной системы и от времени
усреднения принятых эхо-сигналов.
СКП единичного измерения частоты σ равна половине
ширины доплеровского спектра σ = Δfд / 2
Если производится усреднение результатов измерений за
время периода Т:
где N - число статистических независимых измерений частоты за время Т
Для современных ДГАЛ значение этой погрешности находится в
пределах 0,1-0,3%. Для СВЧ при fи = 1 МГц и Т=1 с относительная
погрешность составляет 0,028%, а при fи=2 МГц - 0,014%.
20.
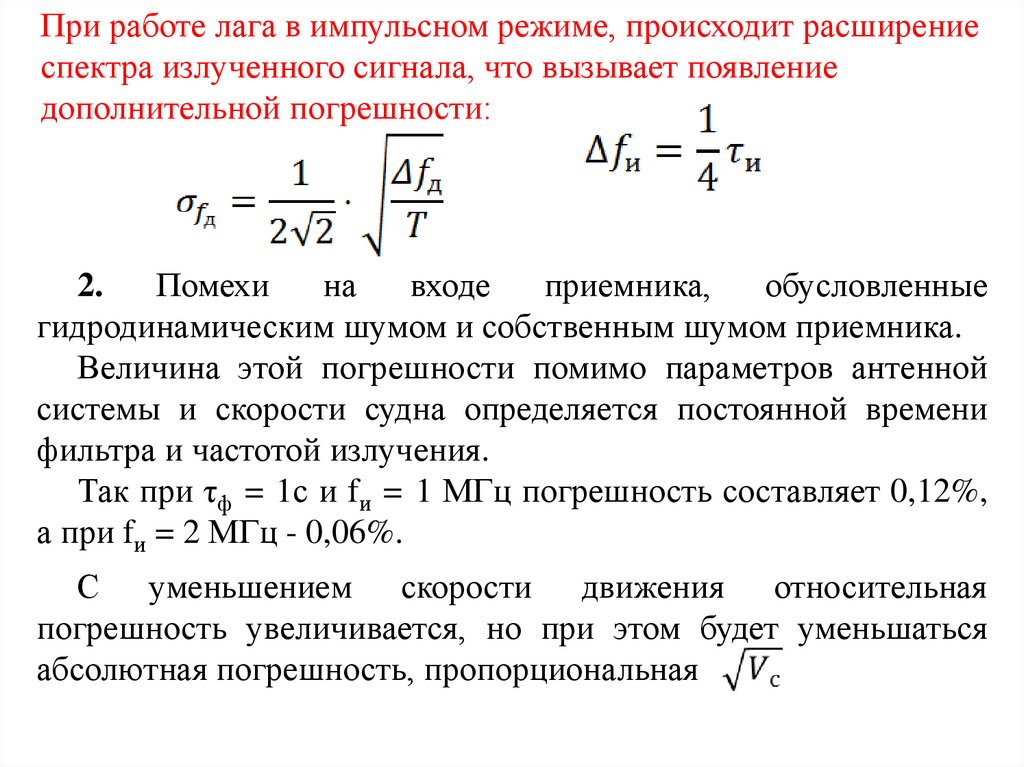
При работе лага в импульсном режиме, происходит расширениеспектра излученного сигнала, что вызывает появление
дополнительной погрешности:
2.
Помехи
на
входе
приемника,
обусловленные
гидродинамическим шумом и собственным шумом приемника.
Величина этой погрешности помимо параметров антенной
системы и скорости судна определяется постоянной времени
фильтра и частотой излучения.
Так при τф = 1с и fи = 1 МГц погрешность составляет 0,12%,
а при fи = 2 МГц - 0,06%.
С уменьшением скорости движения относительная
погрешность увеличивается, но при этом будет уменьшаться
абсолютная погрешность, пропорциональная
21.
Погрешность за отклонение скорости звука в средеВ реальных условиях скорость звука изменяется в
зависимости от температуры воды, ее солености и плотности,
достигая наибольшего отклонения до ± 4-5%. Следовательно, и
погрешность измерения скорости судна доходит до 4-5%.
ДГАЛ имеют специальные корректирующие устройства.
Коррекция вводится с помощью расчета действительной
скорости звука по специальным эмпирическим формулам с
учетом информации от датчиков температуры, солености и т.д.
Погрешность коррекции при этом составляет примерно 0,1%.
Эффективной считается коррекция за счет применения
частотно-независимых антенн.
Такие антенны представляют собой линейные решетки,
состоящие из отдельных преобразователей, обладающих слабой
направленностью.
22.
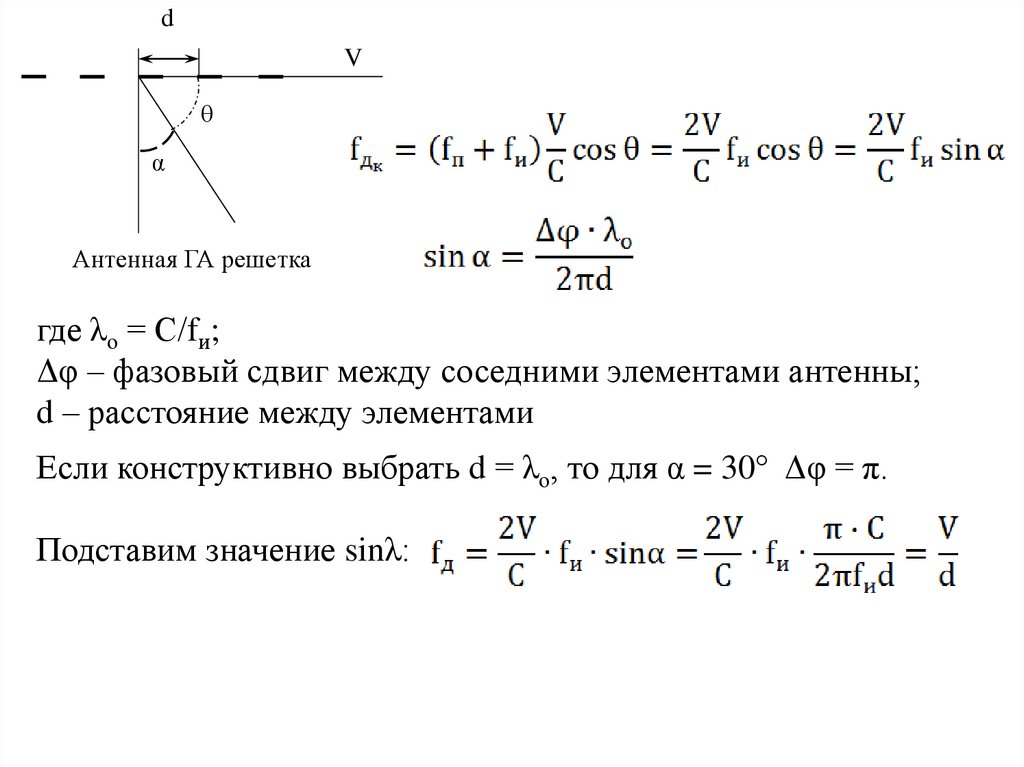
dV
θ
α
Антенная ГА решетка
где λо = С/fи;
Δφ – фазовый сдвиг между соседними элементами антенны;
d – расстояние между элементами
Если конструктивно выбрать d = λо, то для α = 30° Δφ = π.
Подставим значение sinλ:
23.
24.
25.
Погрешность за изменение угла наклона лучаПри рассмотрении однолучевого лага было установлено, что
относительная погрешность при изменении угла (дифферент, килевая
качка) θ = 60° и изменении Δθ на 1°, 2°, 3°, погрешность измерения
скорости, соответственно составит примерно 3%, 6% и 9,1%.
Для двухлучевого ДГАЛ значение относительной погрешности
при изменении угла θ соответственно дает значения погрешностей
0,2%; 0,06% и 0,1%.
Аналогично установка двух лучей в плоскости миделя
значительно уменьшает погрешность измерения скорости на
бортовой качке.
На точность измерения скорости влияет неточная ориентация
акустических антенн в судовой системе координат. Фактические
значения углов ориентации лучей, отличаются от расчетных, что
приводит к отличию масштабных коэффициентов, используемых при
вычислении скорости, от их истинных значений