

 Физика
ФизикаПохожие презентации:










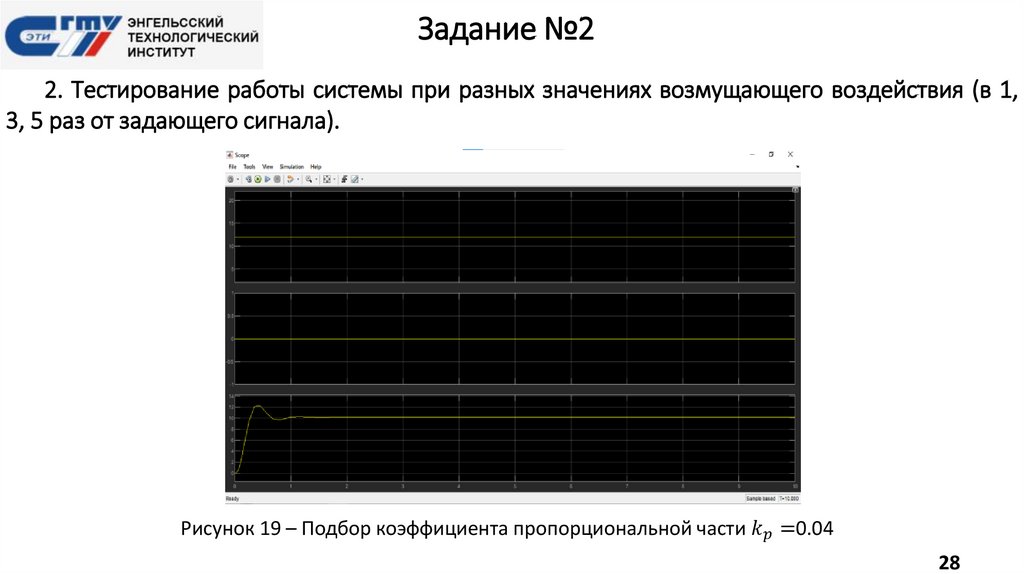
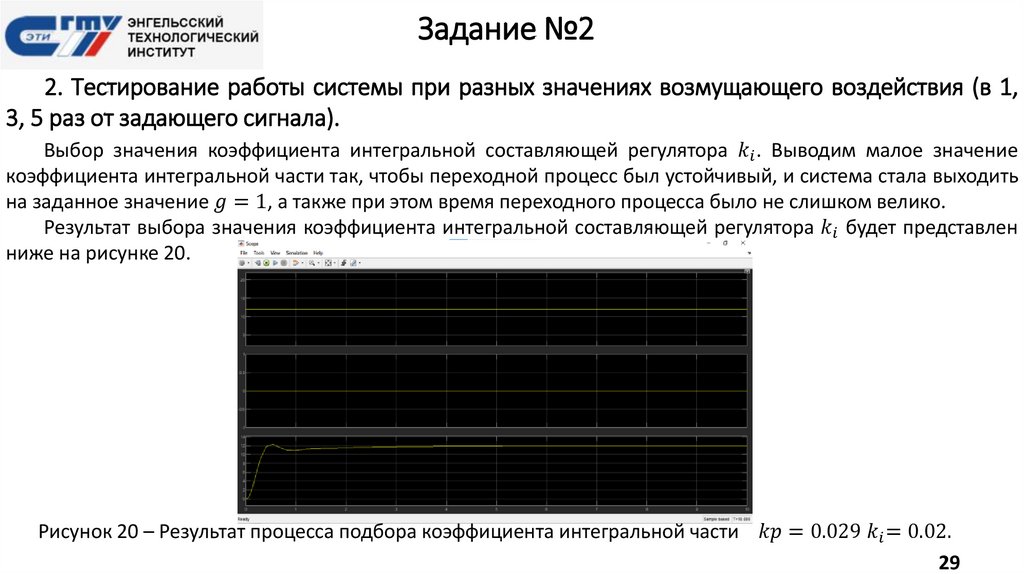
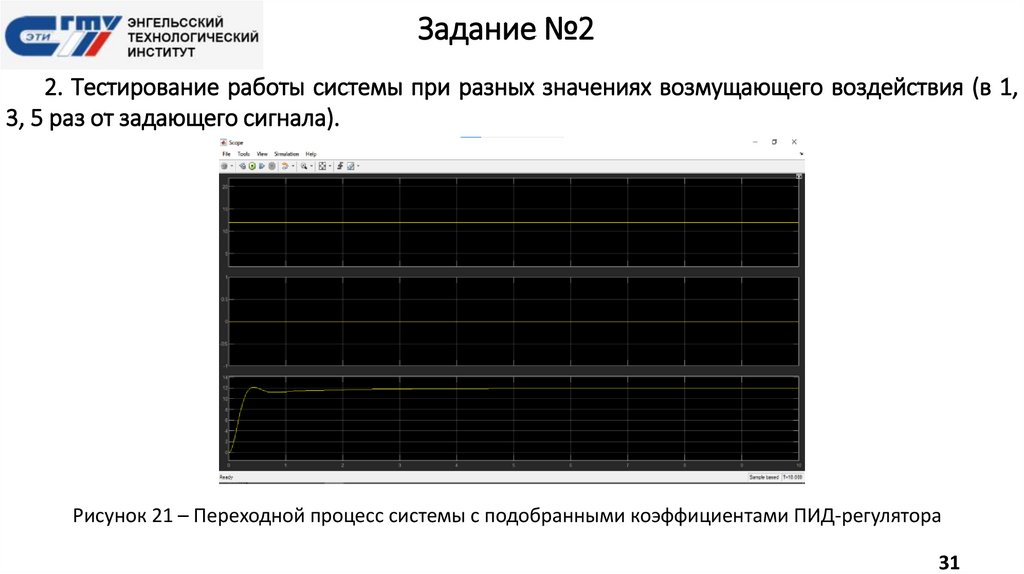
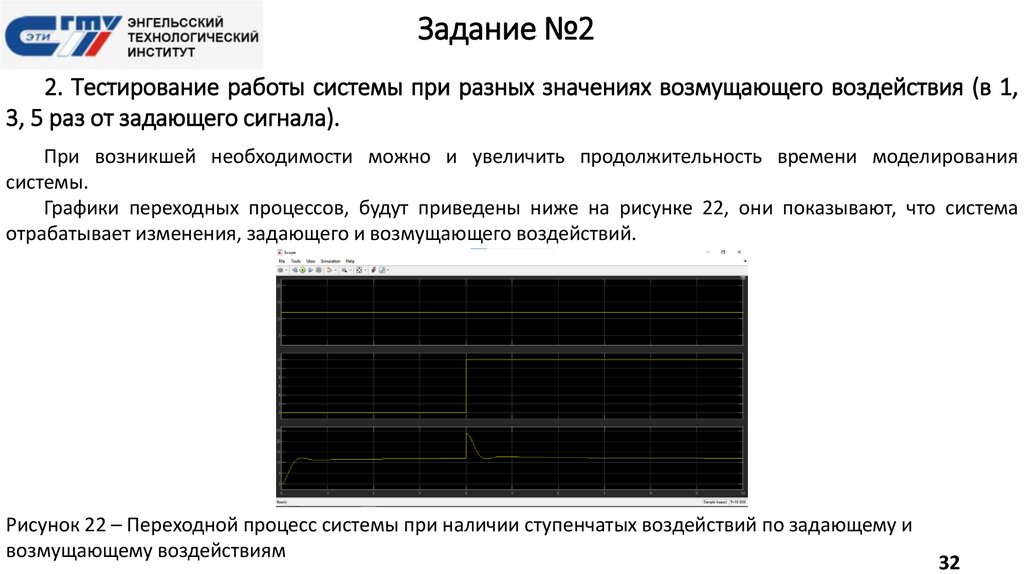
Моделирование и настройка системы управления технологическим процессом с заданными качественными показателями
1.
ФГБОУ ВО«Саратовский государственный технический университет имени Гагарина Ю.А.»
ФИЛИАЛ: «Энгельсский технологический институт»
Курсовая работа по дисциплине: «Теория управления в информационных системах»
Тема курсовой работы: Моделирование и настройка системы управления технологическим процессом с
заданными качественными показателями
Специальность: 09.03.01. Информатика и вычислительная техника
Вариант №15
Работу выполнил:
Студент группы: ИВЧТ-41
ФИО: Петров Дмитрий Николаевич
Работу проверил:
Преподаватель ФИО: Кожанова Евгения Романовна
1
2.
Цель курсовой работы - Анализ и моделирование системы управления силырезания, согласно варианту, и настройки ПИД – регулятора с целью получения
устойчивости с заданными качественными показателями (остаточная
систематическая ошибка равна 0, перерегулирование равно 20%).
2
3.
Задачи курсовой работыДля достижение данной цели необходимо решить перечень следующих задач:
1. Для заданной системы управления провести функциональный и структурный анализ системы
управления процессом резания, согласно варианту. Для анализируемой системы привести
функциональную схему. Выявить и описать все элементы системы, сигналы, действующие в системе,
способ передачи управляющего воздействия на объект управления. Выявить возмущающие воздействия
на регулируемый параметр. Описать принцип работы системы управления при изменении задающего
воздействия и возмущающего воздействия. Составить структурную схему, описать, как в данной системе
обеспечивается отрицательная обратная связь.
2. Построить динамические математические модели и статические характеристики всех элементов
системы. Построить структурную схему системы управления с передаточными функциями всех
элементов.
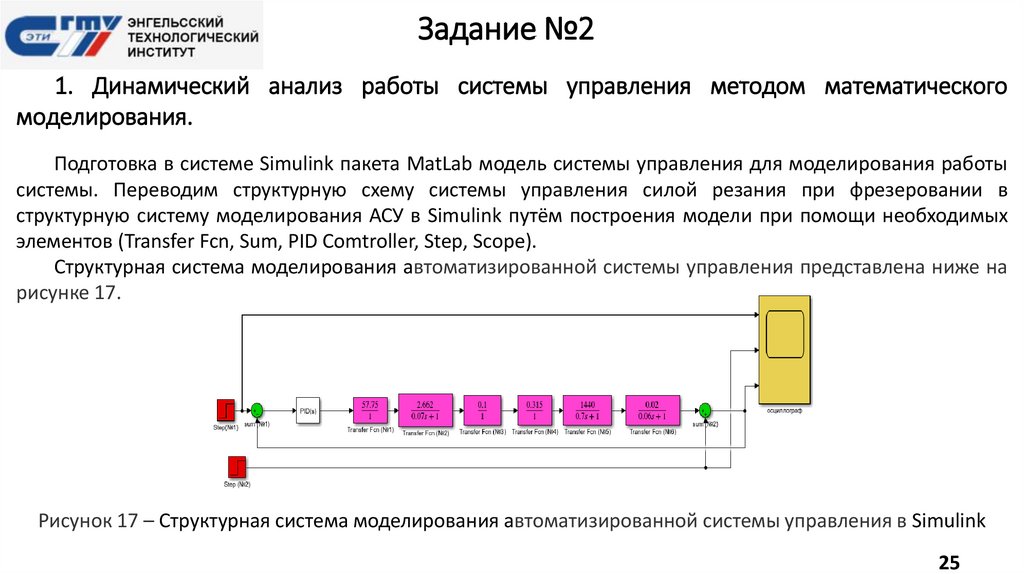
3. Провести динамический анализ работы системы методом математического моделирования.
Методом математического моделирования произвести настройку ПИД – регулятора в Simulink / MATLAB,
описав этапы настройки ПИД – регулятора необходимые для обеспечения заданных качественных
показателей (остаточная систематическая ошибка равна 0, перерегулирование равно 20%).
3
4.
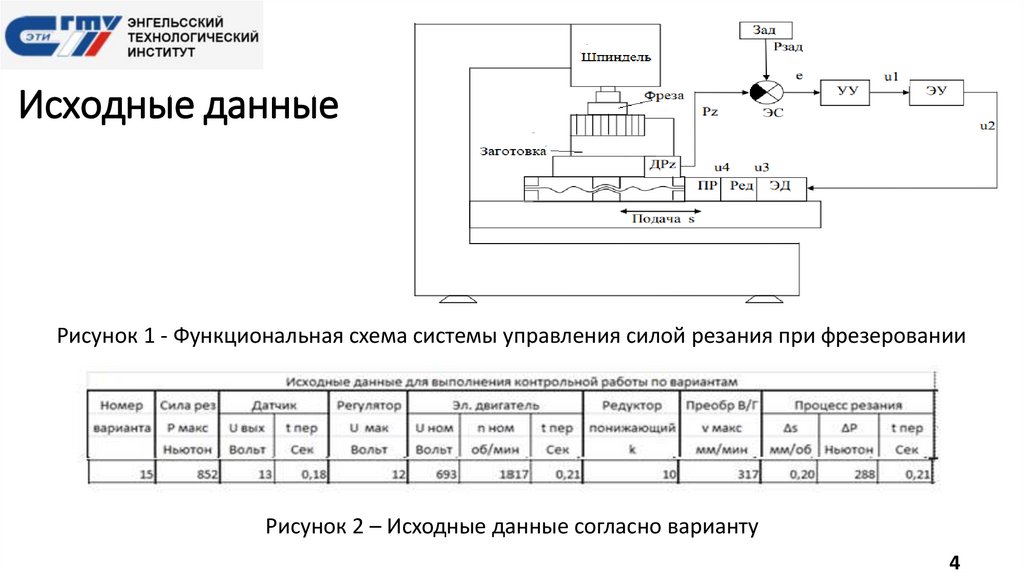
Исходные данныеРисунок 1 - Функциональная схема системы управления силой резания при фрезеровании
Рисунок 2 – Исходные данные согласно варианту
4
5.
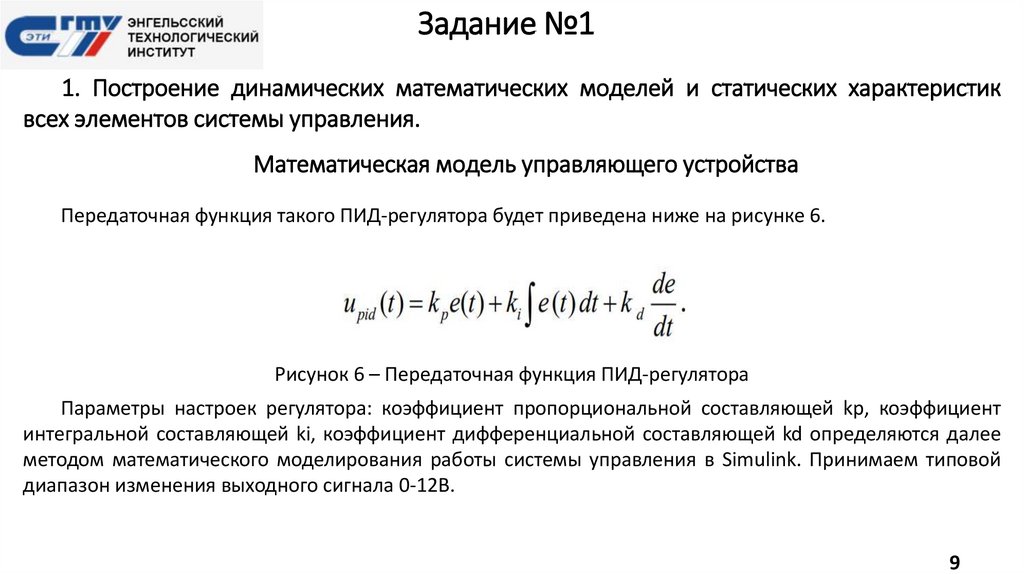
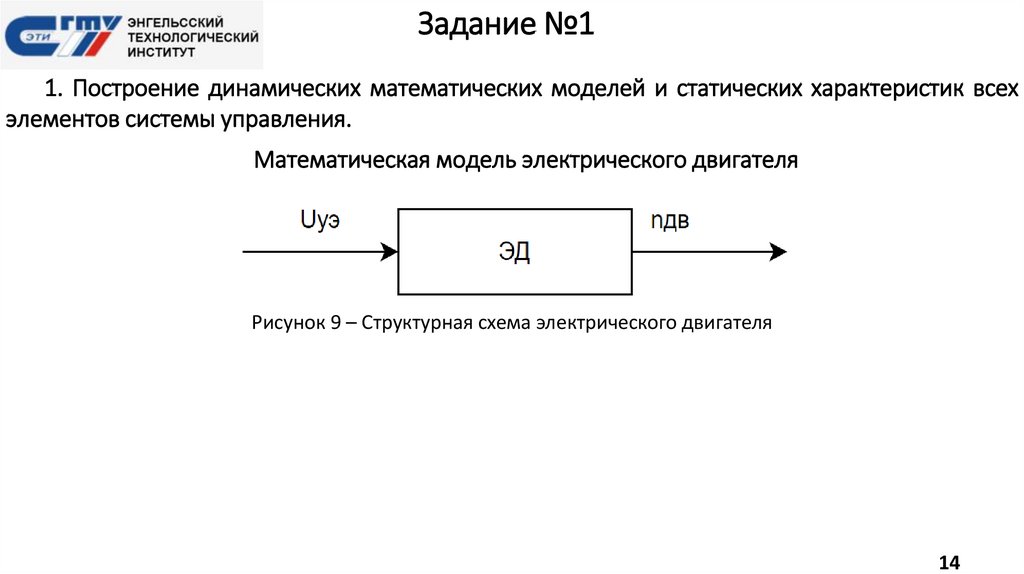
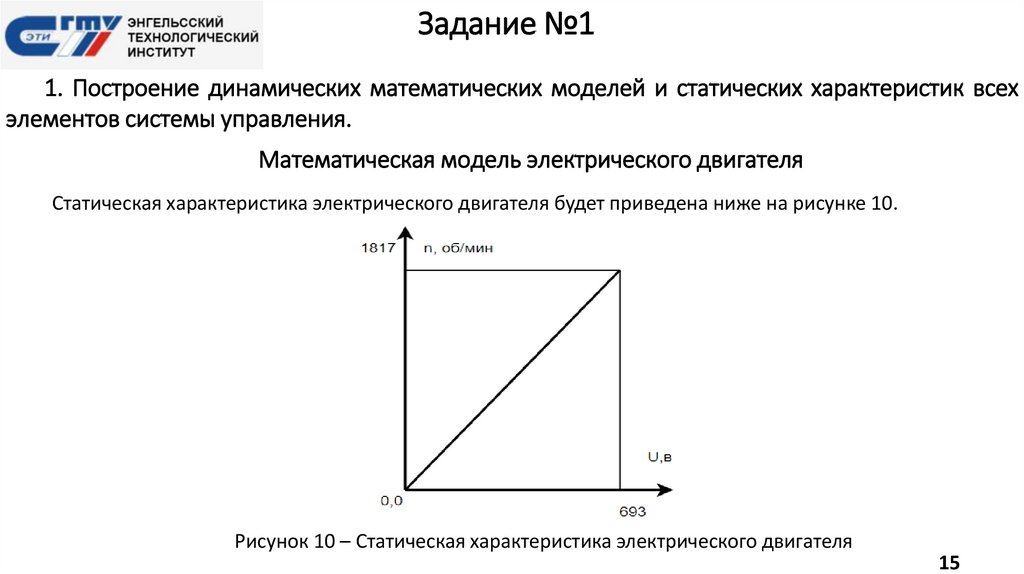
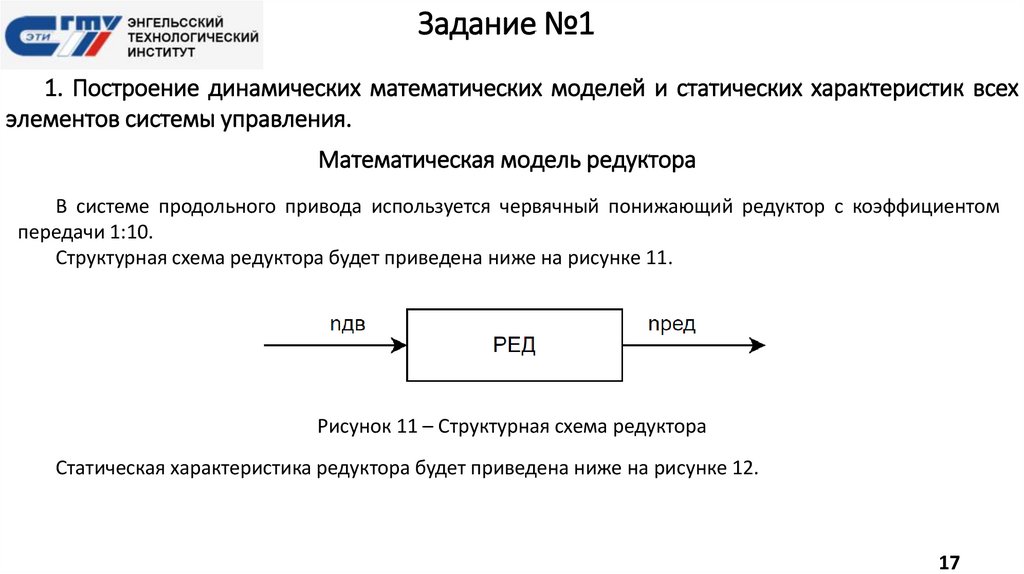
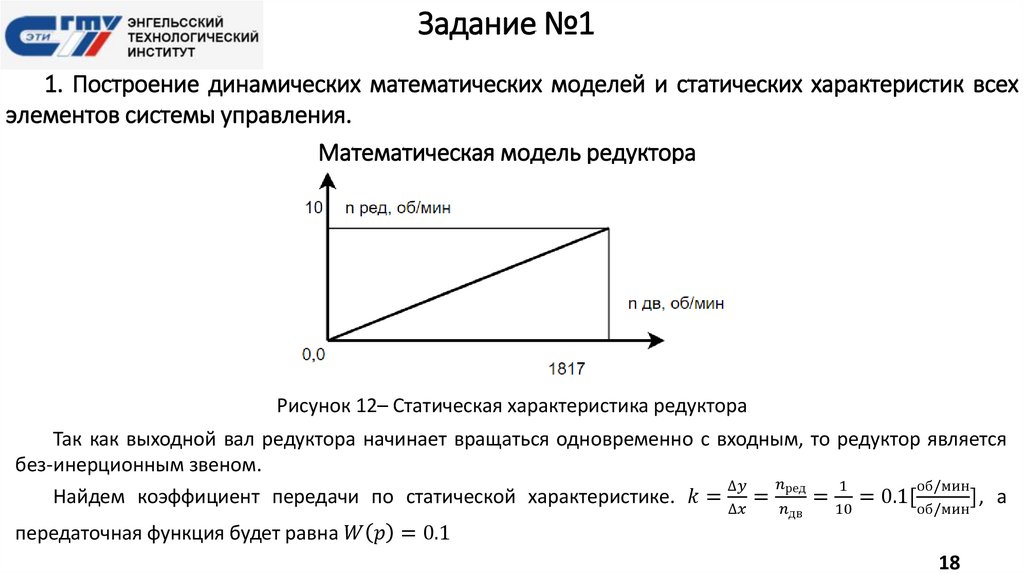
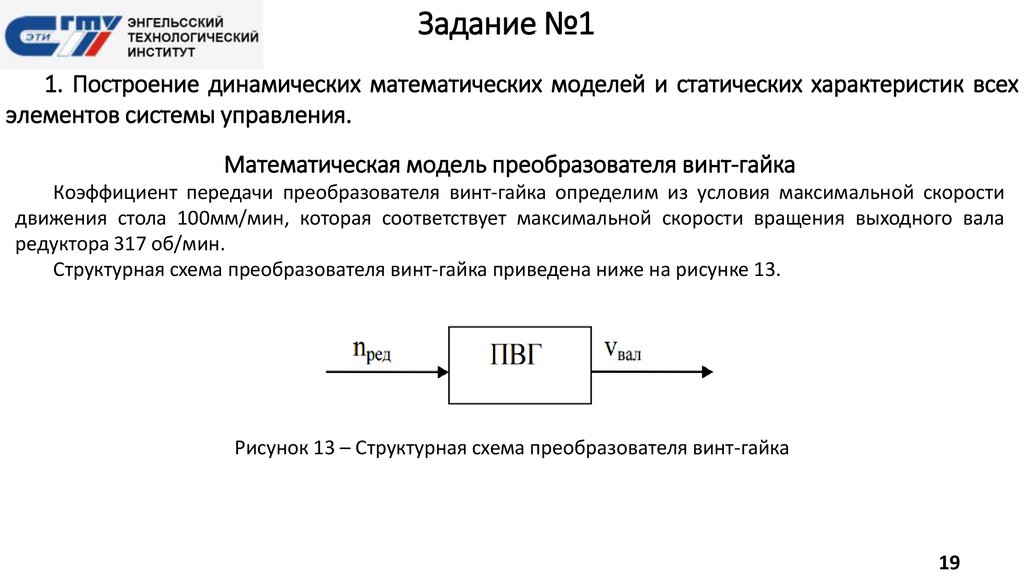
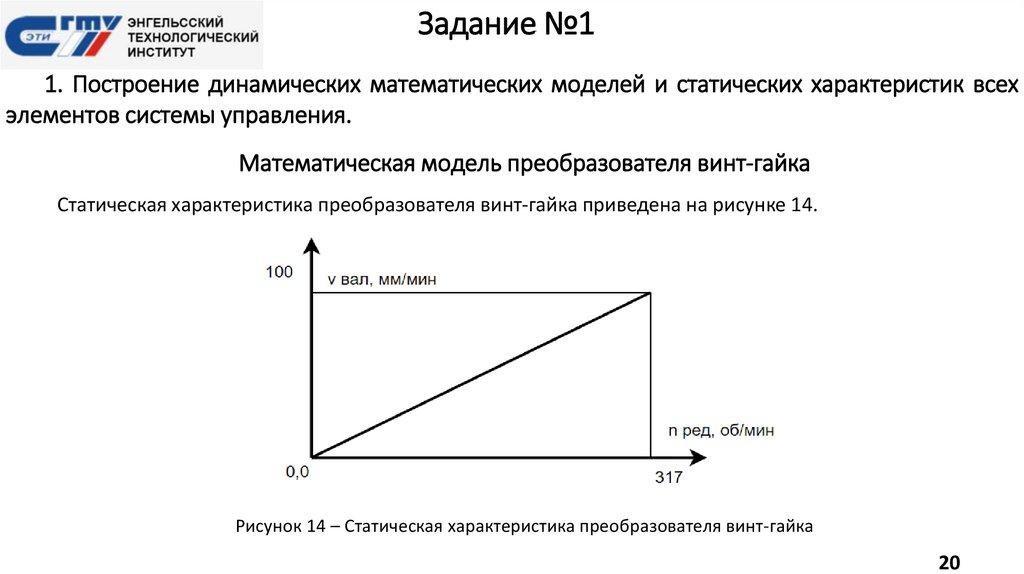
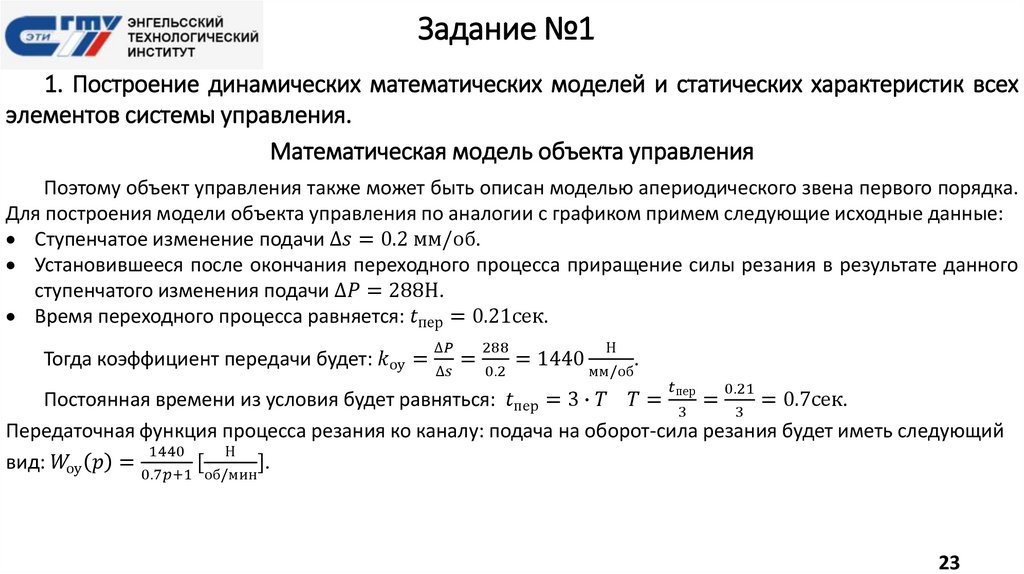
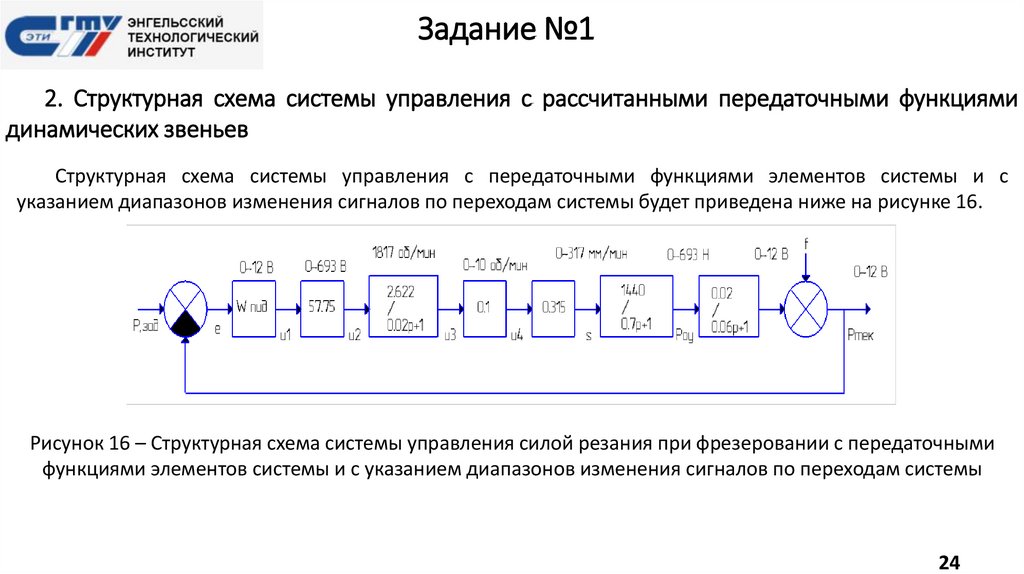
Задание №11. Построение динамических математических моделей и статических характеристик
всех элементов системы управления.
Математическая модель датчика силы резания
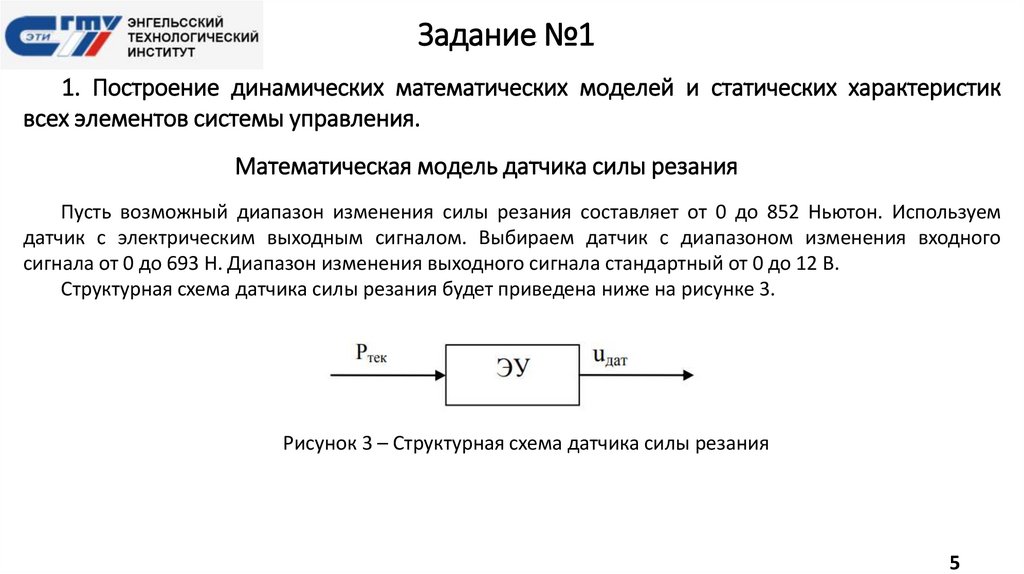
Пусть возможный диапазон изменения силы резания составляет от 0 до 852 Ньютон. Используем
датчик с электрическим выходным сигналом. Выбираем датчик с диапазоном изменения входного
сигнала от 0 до 693 Н. Диапазон изменения выходного сигнала стандартный от 0 до 12 В.
Структурная схема датчика силы резания будет приведена ниже на рисунке 3.
Рисунок 3 – Структурная схема датчика силы резания
5
6.
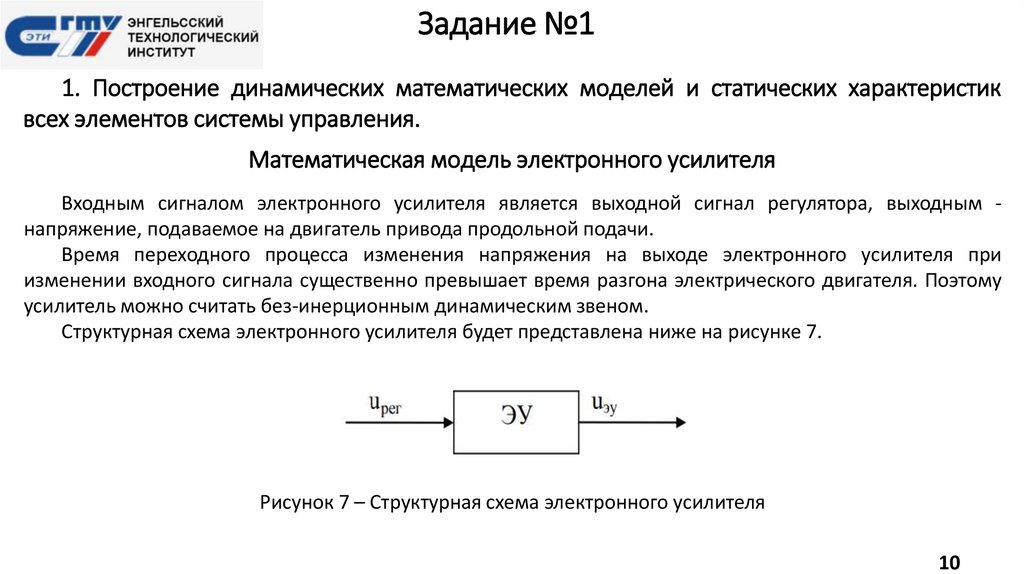
Задание №11. Построение динамических математических моделей и статических характеристик
всех элементов системы управления.
Математическая модель датчика силы резания
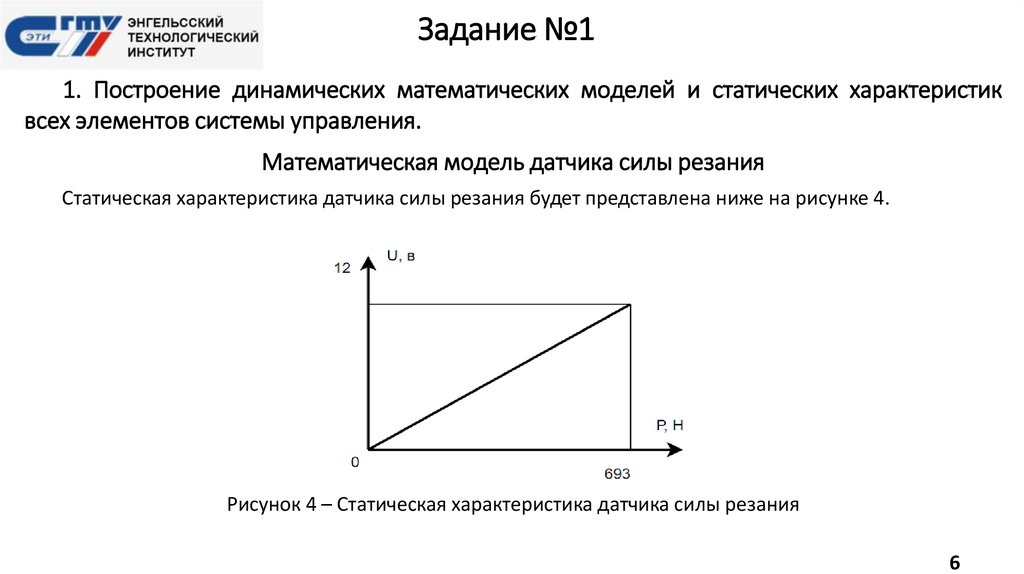
Статическая характеристика датчика силы резания будет представлена ниже на рисунке 4.
Рисунок 4 – Статическая характеристика датчика силы резания
6
7.
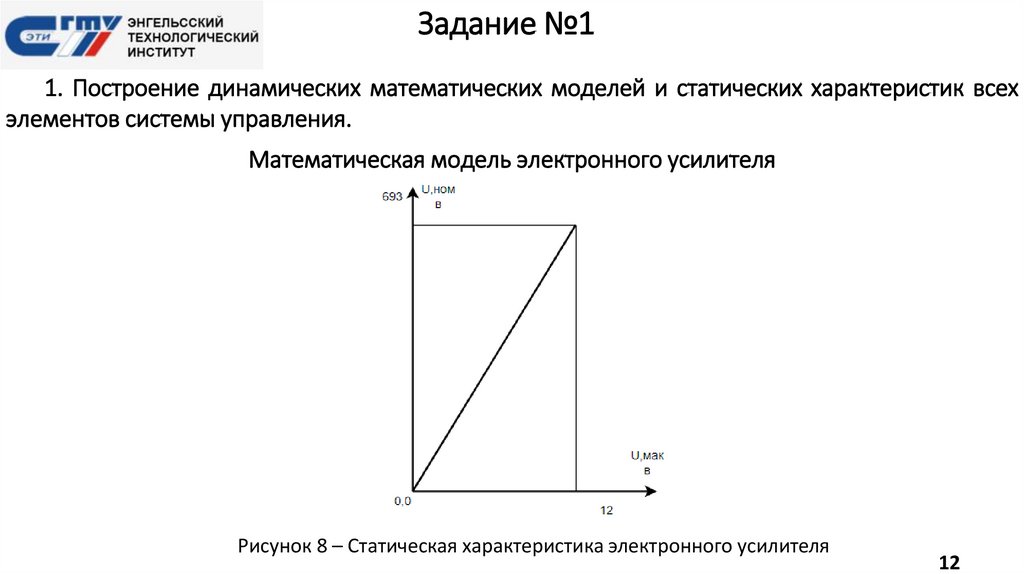
Задание №11. Построение динамических математических моделей и статических характеристик
всех элементов системы управления.
Математическая модель датчика силы резания
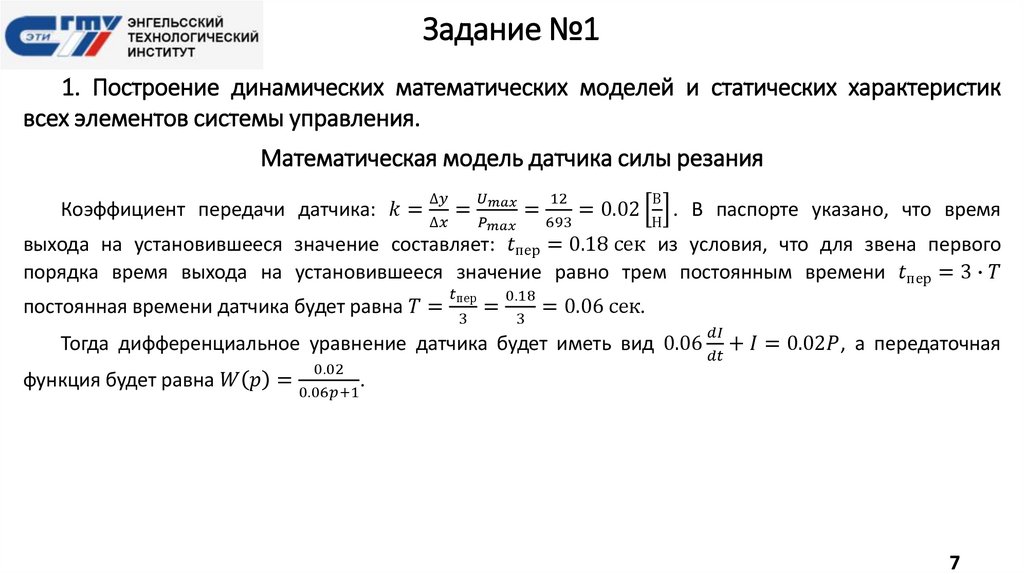
Коэффициент передачи датчика: