




")


")

 География
ГеографияПохожие презентации:

")








Теория снимка. Лекция №2
1. Теория снимка
Лекция №2ТЕОРИЯ СНИМКА
2. 1. Элементы ориентирования фотоснимка
1. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ ФОТОСНИМКАа) Элементы внутреннего ориенитирования (ЭВнО)
S
f
у
o′
хо
o
уо
x
x x xo ;
(1.6)
y y yo .
где х′,
у′ - измеренные координа-ты;
х, у - исправленные координа-ты
Рис.1
ЭВнО фотоснимка:
хо,уо, f
3.
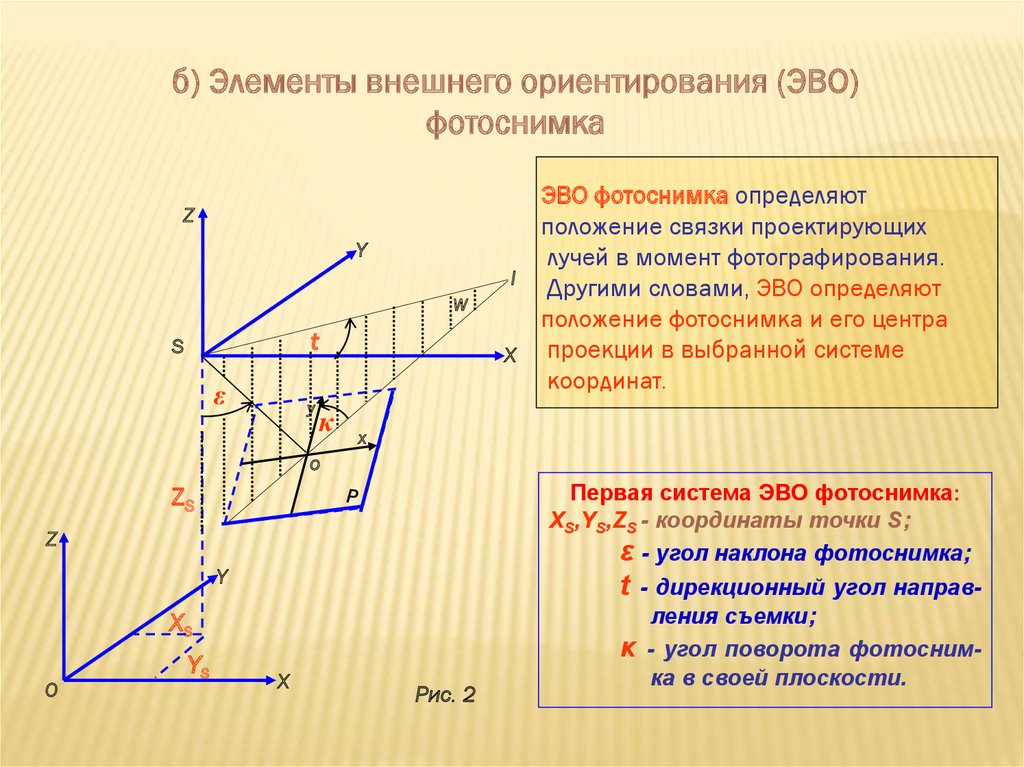
б) Элементы внешнего ориентирования (ЭВО)фотоснимка
Z
Y
I
W
t
S
ε
y
κ
X
ЭВО фотоснимка определяют
положение связки проектирующих
лучей в момент фотографирования.
Другими словами, ЭВО определяют
положение фотоснимка и его центра
проекции в выбранной системе
координат.
x
o
Первая система ЭВО фотоснимка:
XS,YS,ZS - координаты точки S;
ε - угол наклона фотоснимка;
ZS
Z
Y
XS
О
YS
- дирекционный угол направления съемки;
κ - угол поворота фотоснимка в своей плоскости.
t
X
Рис. 2
4.
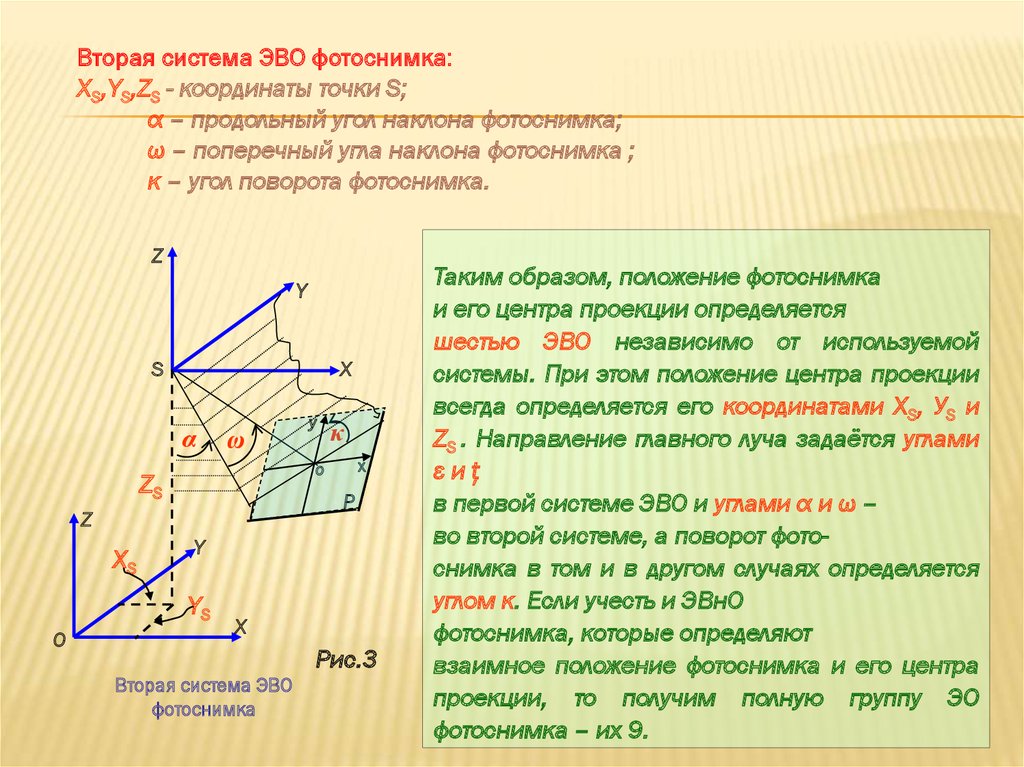
Вторая система ЭВО фотоснимка:XS,YS,ZS - координаты точки S;
α – продольный угол наклона фотоснимка;
ω – поперечный угла наклона фотоснимка ;
κ – угол поворота фотоснимка.
Z
Y
X
S
α
ω
x
Р
Z
Y
YS
О
κ
o
ZS
XS
y
X
Рис.3
Вторая система ЭВО
фотоснимка
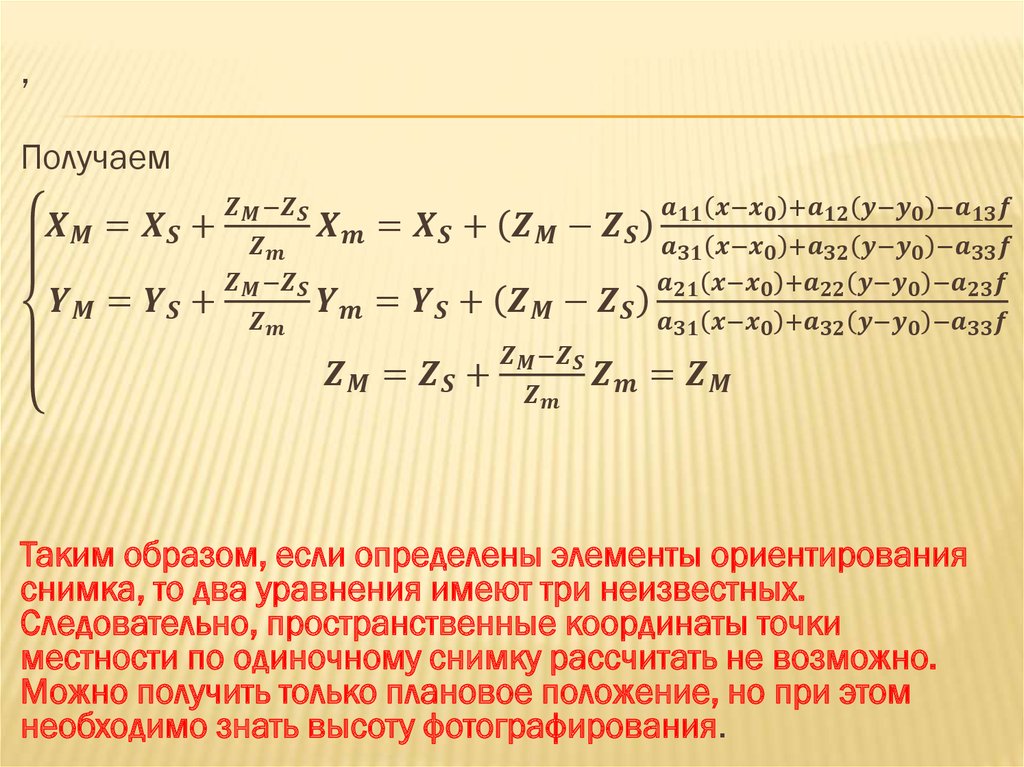
Таким образом, положение фотоснимка
и его центра проекции определяется
шестью ЭВО независимо от используемой
системы. При этом положение центра проекции
всегда определяется его координатами ХS, УS и
ZS . Направление главного луча задаётся углами
εиţ
в первой системе ЭВО и углами α и ω –
во второй системе, а поворот фотоснимка в том и в другом случаях определяется
углом κ. Если учесть и ЭВнО
фотоснимка, которые определяют
взаимное положение фотоснимка и его центра
проекции, то получим полную группу ЭО
фотоснимка – их 9.
5. Непосредственное определение направляющих косинусов
3. Направляющие косинусыНЕПОСРЕДСТВЕННОЕ ОПРЕДЕЛЕНИЕ НАПРАВЛЯЮЩИХ
КОСИНУСОВ
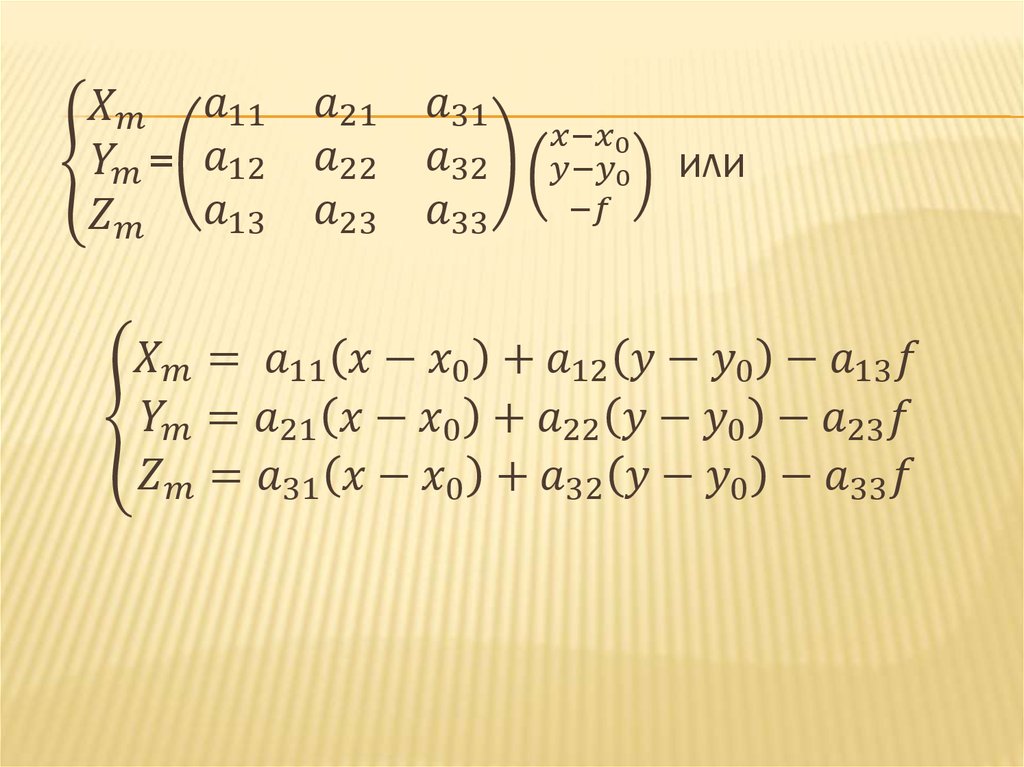
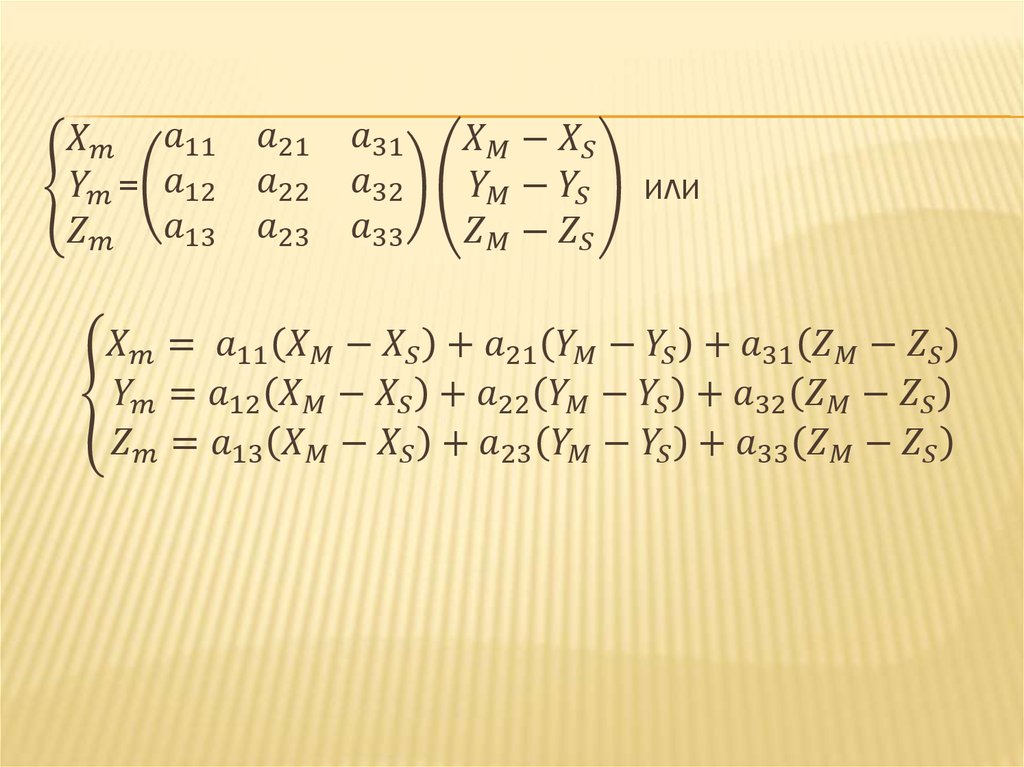
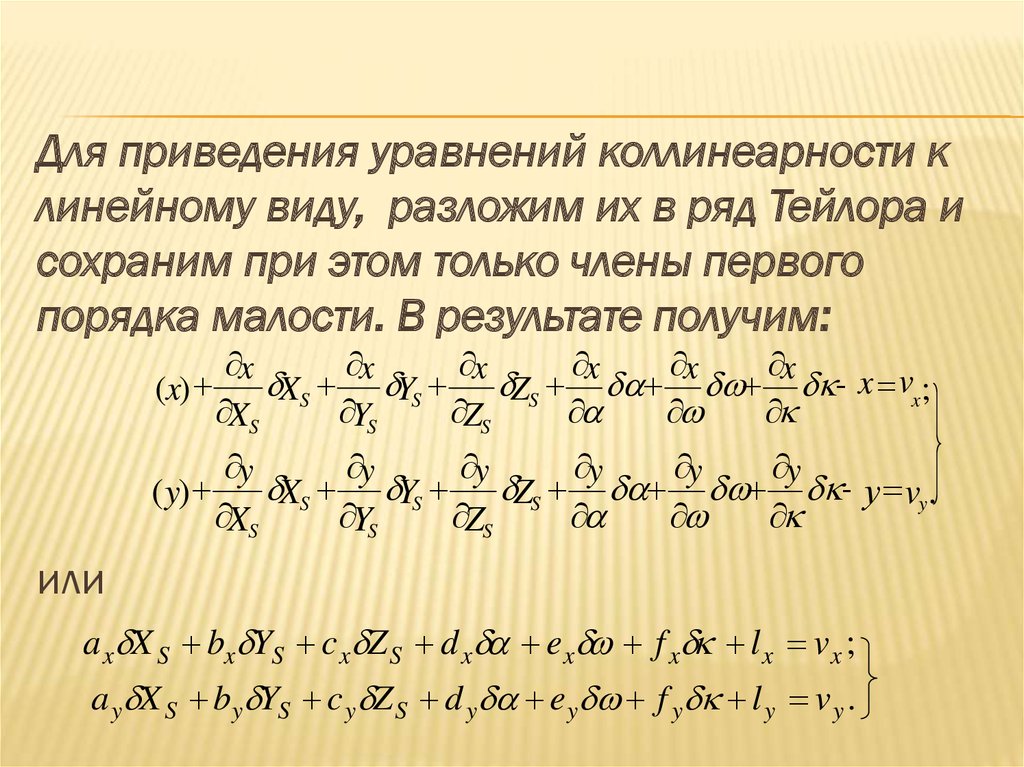
Представим зависимости в матричной форме:
а
x
а y
а
f
,
(1.7)
где
а11
a12
a13
а21
a21
a23
а31
a32 .(1.8)
a33
Из уравнения (1.7) следует, что если имеются точки с координатами,
как в пространственной системе координат SXYZ, так и с координатами в системе координат аэрокамеры Sxyz, то представляется возможным составить систему уравнений вида (1.7), из решения которой можно определить направляющие косинусы (1.8).
6. Определение направляющих косинусов по ЭВО фотоснимка
ОПРЕДЕЛЕНИЕ НАПРАВЛЯЮЩИХ КОСИНУСОВ ПО ЭВОФОТОСНИМКА
Левый поворот на угол α, правый поворот на угол ω
и правый поворот на угол κ.
Эти повороты описываются матрицами:
cos
0
sin
0 sin
1
0 .
0 cos
cos
sin
0
0
1
0 cos
0 sin
sin 0
cos
0 .
0
sin .
cos
0
1
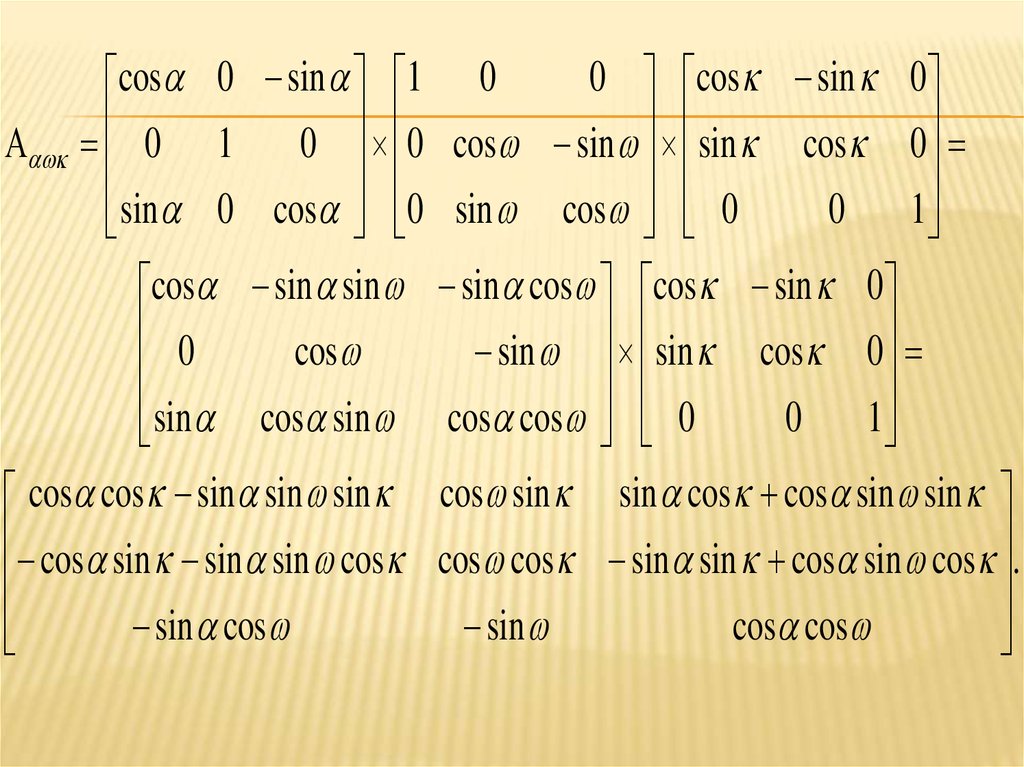
Перемножив последовательно приведенные выше матрицы
поворотов, получим матрицу направляющих
косинусов-функций угловых ЭВО α, ω и κ:
7.
cos 0 sin 10 1
0 0
sin 0 cos 0
cos sin sin
0
cos
sin cos sin
cos cos sin sin sin
cos sin sin sin cos
sin cos
0 cos sin 0
cos sin sin cos 0
sin cos 0
0 1
sin cos cos sin 0
sin sin cos 0
cos cos 0
0 1
cos sin sin cos cos sin sin
cos cos sin sin cos sin cos .
sin
cos cos
0
8.
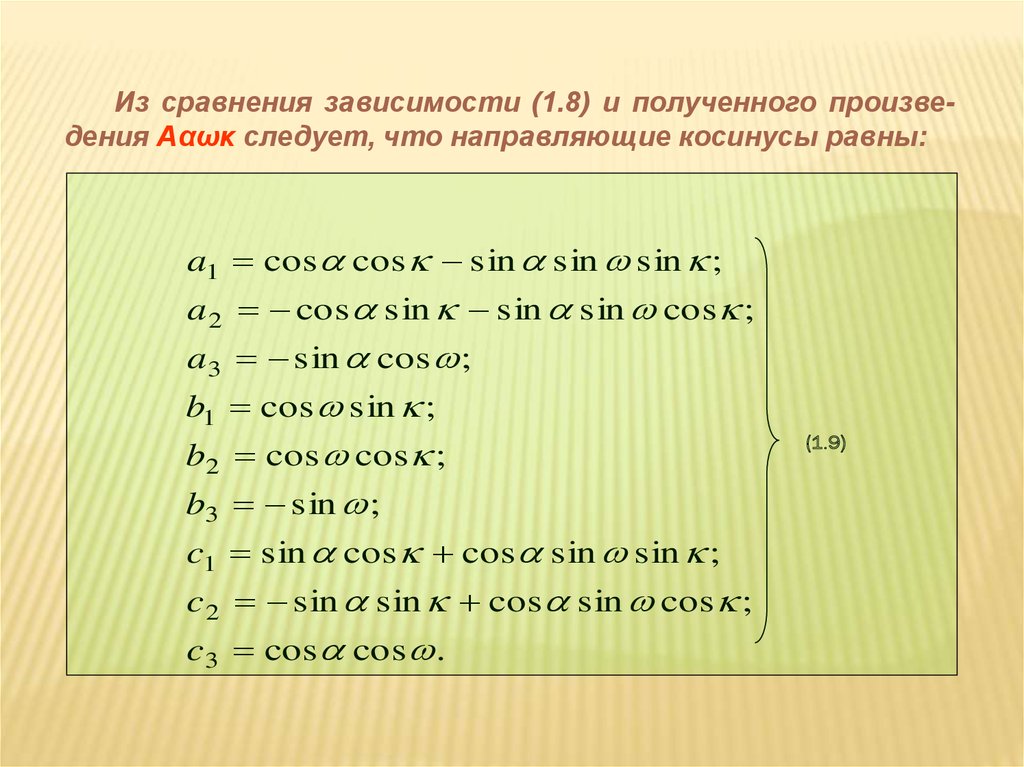
Из сравнения зависимости (1.8) и полученного произведения Аαωκ следует, что направляющие косинусы равны:a1 cos cos sin sin sin ;
a 2 cos sin sin sin cos ;
a3 sin cos ;
b1 cos sin ;
b2 cos cos ;
b3 sin ;
c1 sin cos cos sin sin ;
c 2 sin sin cos sin cos ;
c3 cos cos .
(1.9)
9.
Положение фотоснимка и его центра проекции определяется ЭО:ЭВнО и ЭВО фотоснимка.
ЭВнО определяют в процессе калибровки фотоаппартов (АФА и
КФА). Сведения о полученных результатах заносят в паспорт
фотоаппарата, а затем – в паспорт аэрофотосъёмки.
Для определения ЭВО используют два вида методов6
измерения в полёте;
по опорным точкам.
Связь плоских и пространственных координат точек фотоснимка
определяется посредством направляющих косинусов (НК), которые
являются функциями угловых элементов внешнего ориентирования
(УЭВО) фотоснимка.
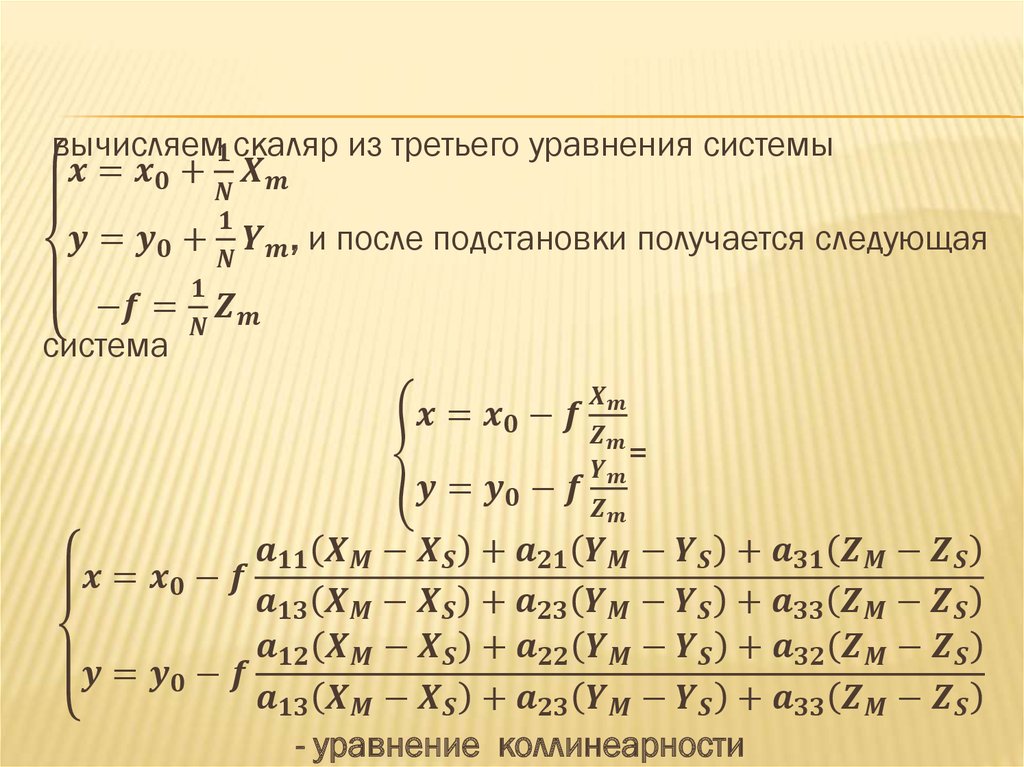
10. 1. Зависимости координат точек местности и снимка.
1. ЗАВИСИМОСТИ КООРДИНАТ ТОЧЕКМЕСТНОСТИ И СНИМКА.
О
Рис.4
Зная координаты точки
снимка, установим
зависимость между
координатами точки снимка m
и точки местности М.