



")

.")

 Сущность строгого способа определения ЭВзО второй системы")

 Математика
Математика География
ГеографияПохожие презентации:




")





Теория пары снимков. Лекция №3
1. Теория пары снимков
Лекция№3ТЕОРИЯ ПАРЫ СНИМКОВ
2. Основные понятия в стереофотограмметрии
ОСНОВНЫЕ ПОНЯТИЯ ВСТЕРЕОФОТОГРАММЕТРИИ
Определение пространственного
положения точек возможно только
по результатам обработки пары
S1
ε1
снимков.
Два смежных перекрывающихся
снимка образуют стереопару, а
стереоскопическое наблюдение и
n1
измерение позволяют построить
фотограмметрическую модель,
которая представляет собой
некоторую поверхность,
образованную совокупностью
точек пересечения
соответственных проектирующих
лучей.
На рисунке 1 показана стереопара
в момент фотографирования точки
местности А.
P
k1 1
B
k2
ε2
o2
o1
c1
a2
a1
W
A
Рис.1
c2 n
2
S2
3.
k1S1
P1
B
k2
ε1
W – базисная плоскость –
o1
плоскость, содержащая
c1
a1
базис фотографирования;
n1
Среди всех базисных
плоскостей выделим:
1. Базисную плоскость,
которая содержит главный
луч фотоснимка, – это главная базисная плоскость.
Очевидно, что стереопара имеет 2 главные
базисные плоскости.
2. Базисную плоскость, содержащую надирные
лучи, - это надирная базисная плоскость (у
стереопары одна надирная базисная плоскость,
так как надирные лучи отвесные, следовательно
параллельные друг другу).
ε2
o2
a2
W
A
Рис.2
c2 n
2
S2
4.
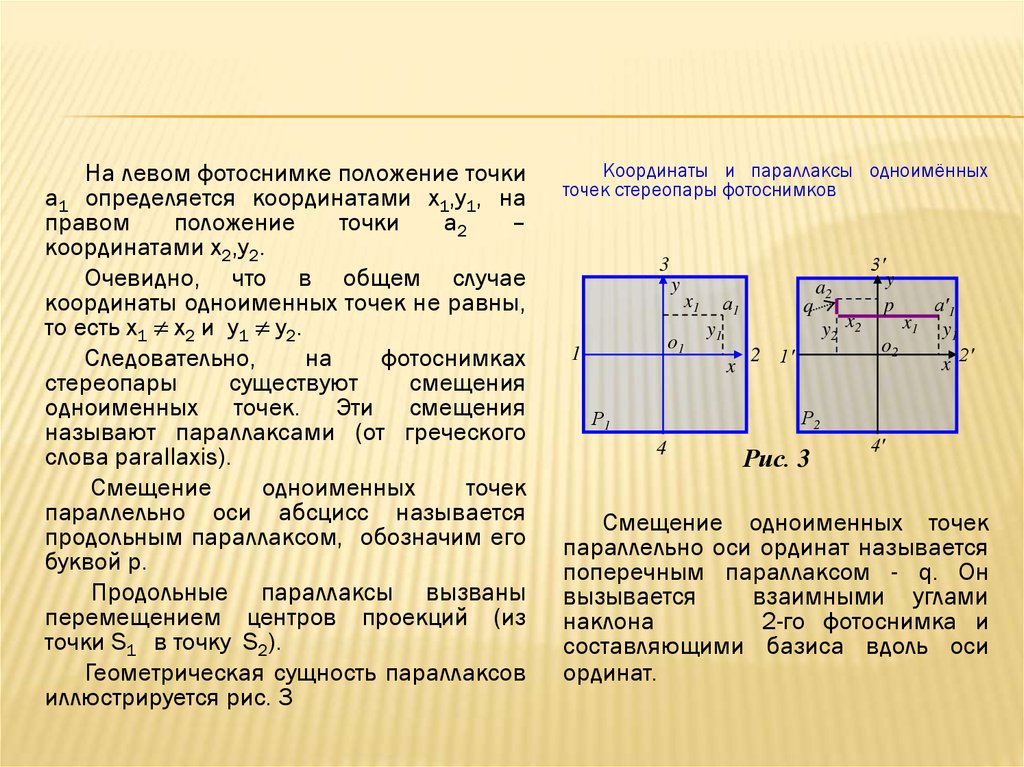
На левом фотоснимке положение точкиа1 определяется координатами х1,у1, на
правом
положение
точки
а2
–
координатами х2,у2.
Очевидно, что в общем случае
координаты одноименных точек не равны,
то есть х1 ≠ х2 и у1 ≠ у2.
Следовательно,
на
фотоснимках
стереопары
существуют
смещения
одноименных точек. Эти смещения
называют параллаксами (от греческого
слова parallaxis).
Смещение
одноименных
точек
параллельно оси абсцисс называется
продольным параллаксом, обозначим его
буквой р.
Продольные параллаксы вызваны
перемещением центров проекций (из
точки S1 в точку S2).
Геометрическая сущность параллаксов
иллюстрируется рис. 3
Координаты и параллаксы одноимённых
точек стереопары фотоснимков
3′
3
y
o1
1
а1
x1
q
a2
y1
2 1′
x
y2 x2
y
p
o2
x1
a′1
y1
x 2′
Р2
Р1
4
Рис. 3
4′
Смещение одноименных точек
параллельно оси ординат называется
поперечным параллаксом - q. Он
вызывается
взаимными углами
наклона
2-го фотоснимка и
составляющими базиса вдоль оси
ординат.
5.
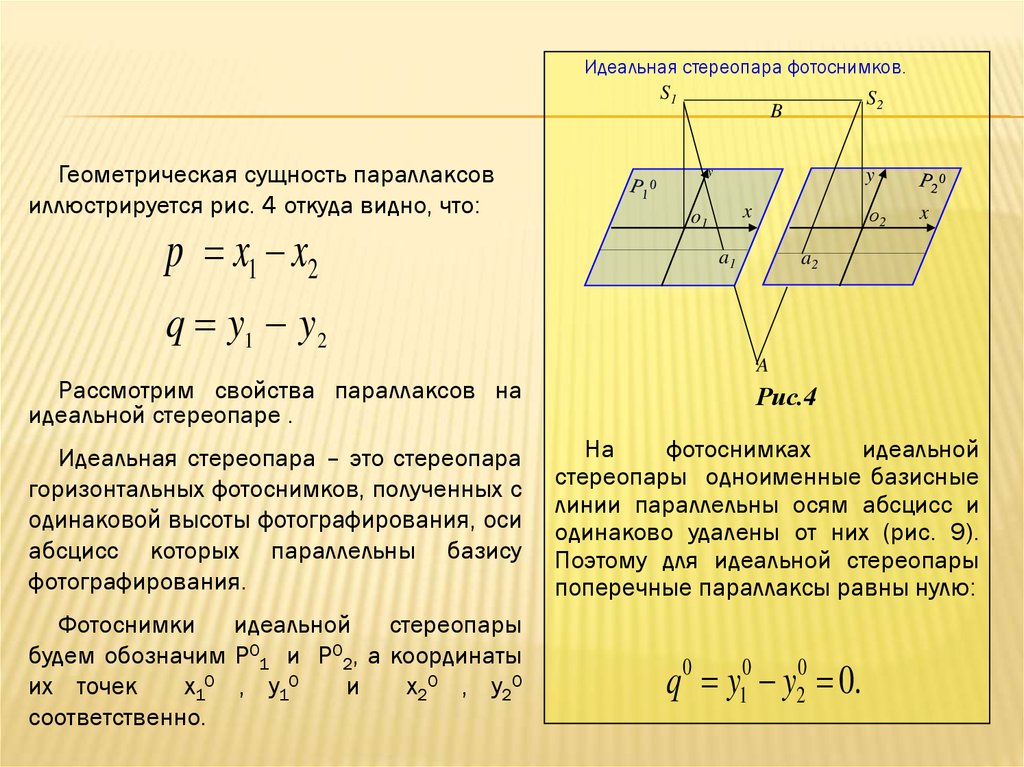
Идеальная стереопара фотоснимков.S1
S2
B
Геометрическая сущность параллаксов
иллюстрируется рис. 4 откуда видно, что:
p x1 x2
y
y
о2
x
o1
a1
x
a2
q y1 y 2
Рассмотрим свойства параллаксов на
идеальной стереопаре .
A
Рис.4
Идеальная стереопара – это стереопара
горизонтальных фотоснимков, полученных с
одинаковой высоты фотографирования, оси
абсцисс которых параллельны базису
фотографирования.
На
фотоснимках
идеальной
стереопары одноименные базисные
линии параллельны осям абсцисс и
одинаково удалены от них (рис. 9).
Поэтому для идеальной стереопары
поперечные параллаксы равны нулю:
Фотоснимки идеальной стереопары
будем обозначим Р01 и Р02, а координаты
их точек
х10 , у10
и
х20 , у20
соответственно.
q0 y10 y20 0.
6. Элементы ориентирования стереопары фотоснимков
ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СТЕРЕОПАРЫФОТОСНИМКОВ
Различают элементы
внутреннего ориентировании
(ЭВнО) и элементы внешнего
ориентирования (ЭВО)
фотоснимков.
ЭВнО фотоснимка
определяют положение центра
проекции относительно
плоскости фотоснимка. К ним
относятся координаты хо,уо
главной точки и его фокусное
расстояние f (рис. 5).
Элементы внутреннего
ориентирования снимка
.
S
β
f
y
хо
o′
P
Рис. 5
o
уо
x
7.
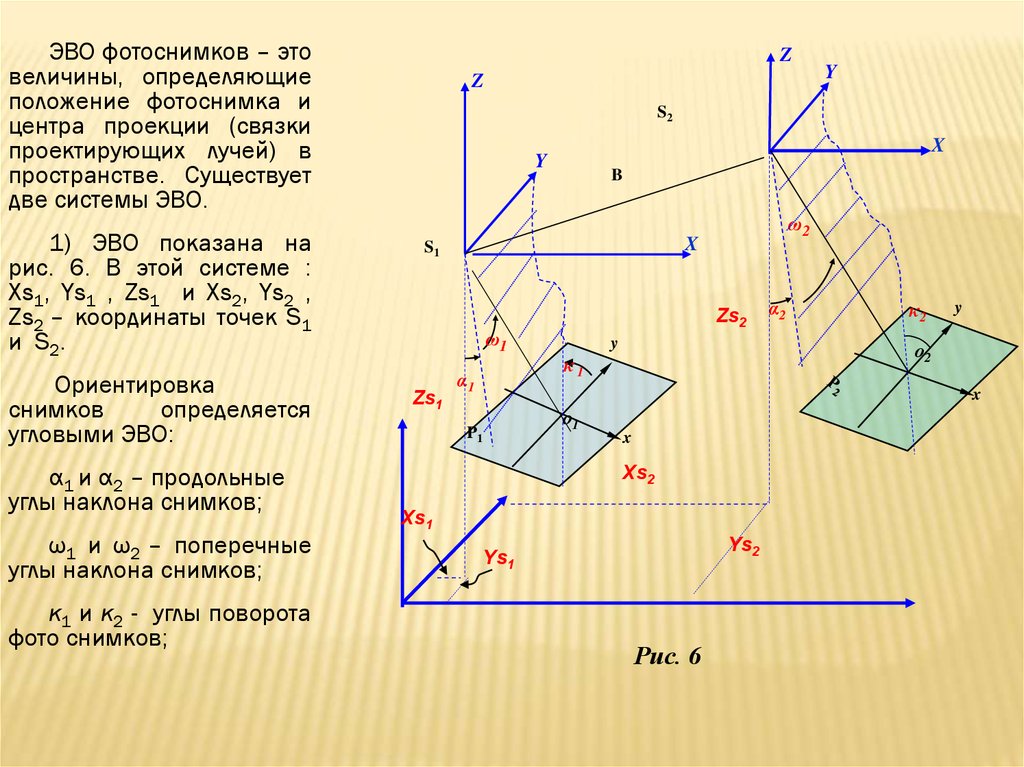
ЭВО фотоснимков – этовеличины, определяющие
положение фотоснимка и
центра проекции (связки
проектирующих лучей) в
пространстве. Существует
две системы ЭВО.
1) ЭВО показана на
рис. 6. В этой системе :
Xs1, Ys1 , Zs1 и Xs2, Ys2 ,
Zs2 – координаты точек S1
и S2.
Ориентировка
снимков
определяется
угловыми ЭВО:
α1 и α2 – продольные
углы наклона снимков;
ω1 и ω2 – поперечные
углы наклона снимков;
κ1 и κ2 - углы поворота
фото снимков;
Z
Z
Y
S2
X
Y
B
X
S1
ω1
Zs1
ω2
α1
Zs2
y
α2
κ2
y
о2
κ1
x
о1
P1
x
Xs2
Xs1
Ys2
Ys1
Рис. 6
8.
Z′
Z
′
B
υ
′
1
B
X
Р
1
о
BZ
τ
′
B
Y
y
X
′
S2
Y
′
S
Y
′
x
1
Рис. 7
∆
X а
′
∆
ω
y
∆
κо
2
x
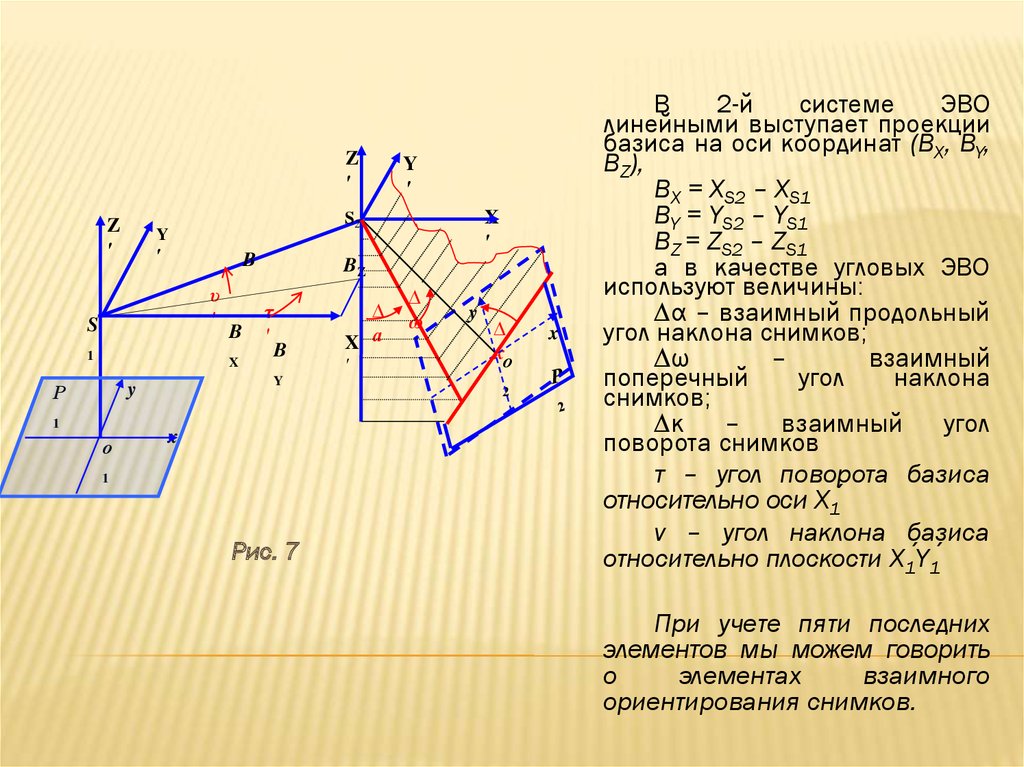
В
2-й
системе
ЭВО
линейными выступает проекции
базиса на оси координат (BX, BY,
BZ),
BX = XS2 – XS1
BY = YS2 – YS1
BZ = ZS2 – ZS1
а в качестве угловых ЭВО
используют величины:
∆α – взаимный продольный
угол наклона снимков;
∆ω
–
взаимный
поперечный
угол
наклона
снимков;
∆κ
–
взаимный
угол
поворота снимков
τ – угол поворота базиса
относительно оси X1́
ν – угол наклона базиса
относительно плоскости X1́Y1́
При учете пяти последних
элементов мы можем говорить
о
элементах
взаимного
ориентирования снимков.
9.
Такимобразом,
положение
стереопары
фотоснимков
однозначно
определяется
пятнадцатью
ЭО
фотоснимков,
которые
составляют
полную
группу
элементов
ориентирования. Если известна полная группа
абсолютных ЭО фотоснимков, то по стереопаре
имеется
возможность
определить
геодезические координаты точек местности.
Следовательно, можно предположить, что ЭО
играют
решающую
роль
при
фотограмметрической обработке фотоснимков.
Поэтому вопрос определения ЭО фотоснимков
является весьма важным .
10. Формулы связи координат точек местности и их изображений на стереопаре снимков (прямая фотограмметрическая засечка)
ФОРМУЛЫ СВЯЗИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ ИИХ ИЗОБРАЖЕНИЙ НА СТЕРЕОПАРЕ СНИМКОВ
(ПРЯМАЯ ФОТОГРАММЕТРИЧЕСКАЯ ЗАСЕЧКА)
Y
Пусть фотоснимки P1 и
P2 получены из точек S1 и
S2, Изображения точки А
на
фотоснимках
обозначим а1 и а2.
Положение
точки
местности
А
будем
определять
в
фотограмметрической СК
началом в точке S1.
S2
Z
B
Y
R0
Z
R
1
Р
2
B
Y
о
X
X
2
y
x
1
y
R
B
S1
X
а2(х2,у
2)
о
1
R
а1(х1,
у1)
Рис. 8
A(X,Y,Z)
Р2
x
11.
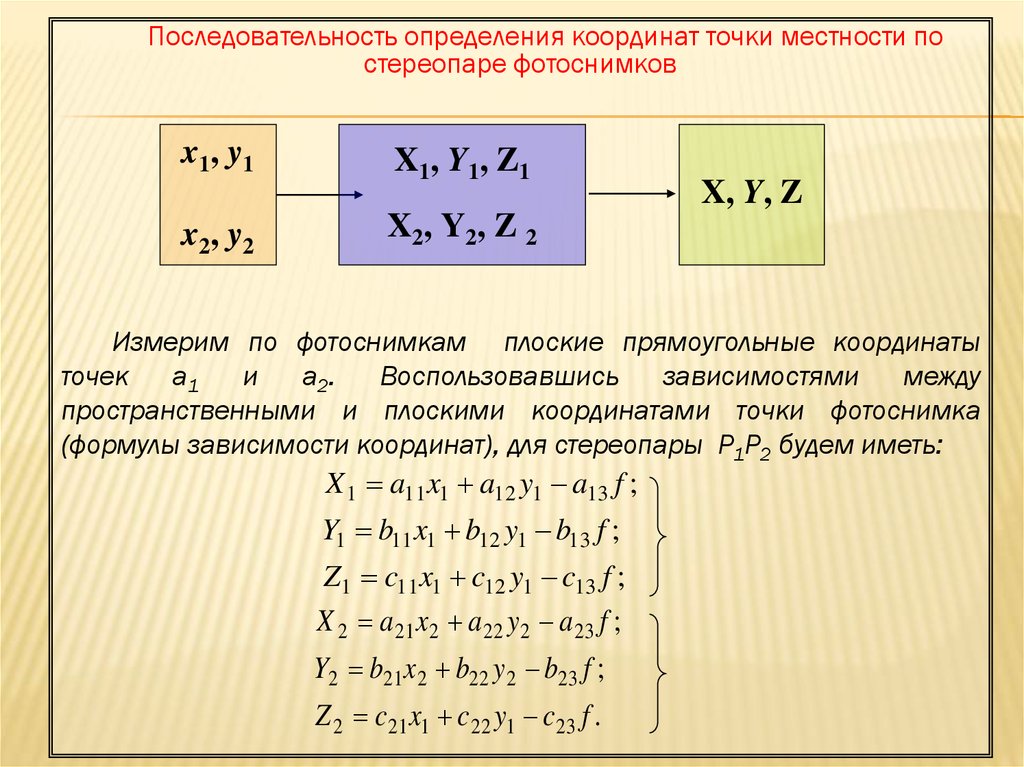
Последовательность определения координат точки местности постереопаре фотоснимков
x1, y1
x2, y2
X1, Y1, Z1
X, Y, Z
X2, Y2, Z 2
Измерим по фотоснимкам плоские прямоугольные координаты
точек
а1
и
а2.
Воспользовавшись
зависимостями
между
пространственными и плоскими координатами точки фотоснимка
(формулы зависимости координат), для стереопары P1P2 будем иметь:
X 1 a11 x1 a12 y1 a13 f ;
Y1 b11 x1 b12 y1 b13 f ;
Z1 c11 x1 c12 y1 c13 f ;
X 2 a 21 x2 a 22 y 2 a 23 f ;
Y2 b21 x2 b22 y 2 b23 f ;
Z 2 c21 x1 c 22 y1 c23 f .
12.
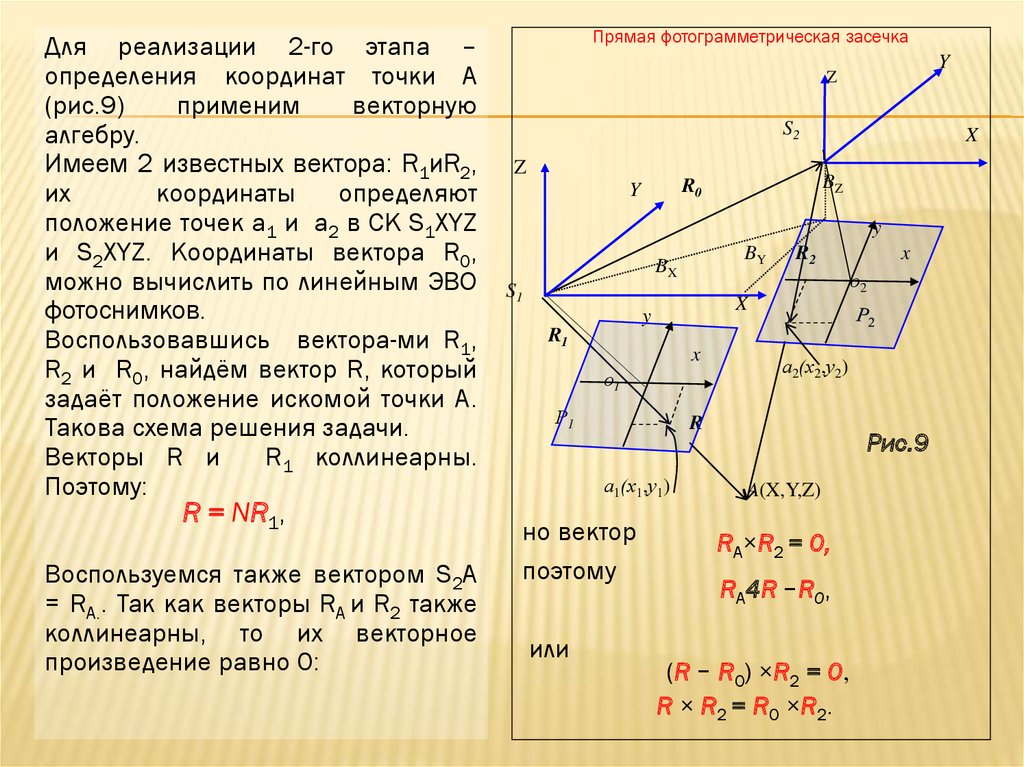
Для реализации 2-го этапа –определения координат точки А
(рис.9)
применим
векторную
алгебру.
Имеем 2 известных вектора: R1иR2,
их
координаты
определяют
положение точек а1 и а2 в СК S1XYZ
и S2XYZ. Координаты вектора R0,
можно вычислить по линейным ЭВО
фотоснимков.
Воспользовавшись вектора-ми R1,
R2 и R0, найдём вектор R, который
задаёт положение искомой точки А.
Такова схема решения задачи.
Векторы R и
R1 коллинеарны.
Поэтому:
R = NR1,
Воспользуемся также вектором S2А
= RА.. Так как векторы RА и R2 также
коллинеарны, то их векторное
произведение равно 0:
Прямая фотограмметрическая засечка
Y
Z
S2
Z
BZ
R0
Y
X
y
BY
BX
X
y
R1
x
о1
Р1
а2(х2,у2)
R
а1(х1,у1)
но вектор
поэтому
x
о2
S1
или
R2
Рис.9
A(X,Y,Z)
RА×R2 = 0,
RА4R −R0,
(R − R0) ×R2 = 0,
R × R2 = R0 ×R2.
13.
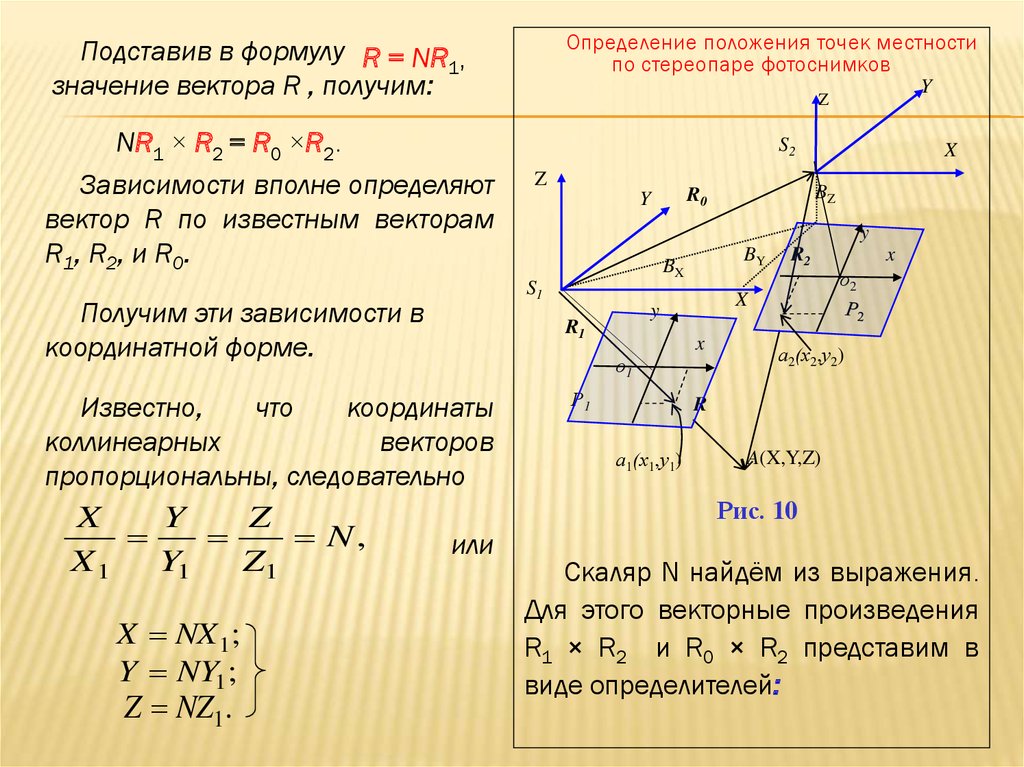
Определение положения точек местностипо стереопаре фотоснимков
Подставив в формулу R = NR1,
значение вектора R , получим:
NR1 × R2 = R0 ×R2.
Зависимости вполне определяют
вектор R по известным векторам
R1, R2, и R0.
X NX1;
Y NY1 ;
Z NZ1.
Z
X
BZ
R0
Y
y
BY
BX
x
о1
Р1
R2
X
y
R1
Известно,
что
координаты
коллинеарных
векторов
пропорциональны, следовательно
X
Y
Z
N,
X1
Y1
Z1
S2
S1
Получим эти зависимости в
координатной форме.
Y
Z
x
о2
а2(х2,у2)
R
а1(х1,у1)
A(X,Y,Z)
Рис. 10
или
Скаляр N найдём из выражения.
Для этого векторные произведения
R1 × R2 и R0 × R2 представим в
виде определителей:
14.
Дальше, если разложить определители по элементам первых строк иучесть что векторы
R1 × R2 и R0 × R2 коллинеарны, то скаляр N будет
равен:
BY Z 2 Y2 BZ B X Z 2 BZ X 2 B X Y2 X 2 BY
N
.
Y1Z 2 Y2 Z1
X 1 Z 2 X 2 Z1
X 1Y2 X 2Y1
X NX1;
Y NY1 ;
Z NZ1.
Это и есть формулы
координатной форме.
прямой
фотограмметрической
засечки
в
15.
Из этих зависимостей следует, что по стереопаре можно определитьне только плановые координаты, но и высоту любой точки местности,
изобразившихся на фотоснимках. Для этого необходимо:
знать ЭО фотоснимков;
измерить координаты x1, y1
стереопары;
и x2, y2 соответственных точек
вычислить пространственные координаты этих точек по формулам
по формулам (3.26) и (3.27) найти координаты точки местности.
Таким образом, по сравнению с одиночным фотоснимком
стереопара обладает большими возможностями.
16.
Зависимости между координатами точки местности и координатамиеё изображений на стереопаре фотоснимков описывают прямую
фотограмметрическую засечку.
Засечка образуется каждой парой одноимённых проектирующих
лучей на базисе фотографирования, как основании треугольника
засечки.
Формулы прямой фотограмметрической засечки являются
математическим описанием геометрической модели местности, как
совокупности точек пересечения одноимённых проектирующих лучей.
Впервые в таком виде формулы прямой фотограмметрической засечки
были получены Н. А. Урмаевым и опубликованы в работе «О некоторых
задачах фотограмметрии» (1939 г.).
17. Формулы связи координат точек местности и их изображений на стереопаре снимков идеального случая съемки
ФОРМУЛЫ СВЯЗИ КООРДИНАТ ТОЧЕК МЕСТНОСТИИ ИХ ИЗОБРАЖЕНИЙ НА СТЕРЕОПАРЕ СНИМКОВ
ИДЕАЛЬНОГО СЛУЧАЯ СЪЕМКИ
Наиболее просто решается задача определения координат точек
местности
по идеальной стереопаре. Для идеальной стереопары
составляющие базиса BY = BZ = 0 и α1= ω1= κ1 = α2= ω2 = κ2 = 0. Поэтому
направляющие косинусы будут равны :
а1 а2
b1 b2
c1 c2
а3 1 0 0
b3 0 1 0 .
c3 0 0 1
(3.28)
В выражении (3.28) приведены значения направляющих косинусов для
одиночного горизонтального фотоснимка. Понятно, что для обоих
фотоснимков идеальной стереопары значения направляющих косинусов
будут такими же.
18.
Подставив значения направляющих косинусов в формулы(3.21) и (3.22),
X 1 a11 x1 a12 y1 a13 f ;
Y1 b11 x1 b12 y1 b13 f ;
(3.21)
Z1 c11 x1 c12 y1 c13 f ;
X 2 a 21 x2 a 22 y 2 a 23 f ;
Y2 b21 x2 b22 y 2 b23 f ;
(3.22)
Z 2 c21 x1 c22 y1 c23 f .
получим зависимости, связывающие
пространственные координаты точек
идеальной стереопары
X 1 x 10 ;
Y 1 y 10 ;
Z1 f ;
(3.29)
X x20 ;
2
Y2 y0 ;
2
Z2
f.
(3.30)
плоские и
фотоснимков
19.
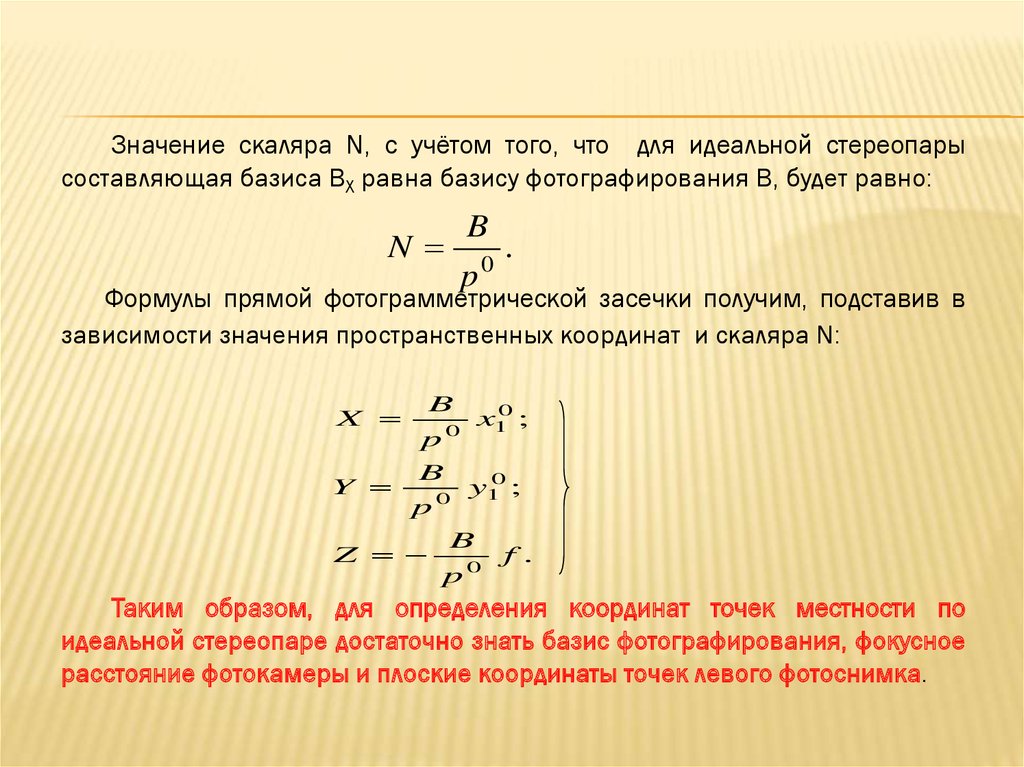
Значение скаляра N, с учётом того, что для идеальной стереопарысоставляющая базиса BX равна базису фотографирования B, будет равно:
B
N
p
0
.
Формулы прямой фотограмметрической засечки получим, подставив в
зависимости значения пространственных координат и скаляра N:
X
Y
B
p
B
p
Z
x10 ;
0
0
y10 ;
B
p
0
f.
Таким образом, для определения координат точек местности по
идеальной стереопаре достаточно знать базис фотографирования, фокусное
расстояние фотокамеры и плоские координаты точек левого фотоснимка.
20.
ЗаключениеФормулы прямой фотограмметрической засечки свидетельствуют о
том, что стереопара в отличие от одиночного фотоснимка позволяет
определять все три координаты любой точки местности, которая
изобразилась на фотоснимках этой стереопары. Необходимым
условием является наличие полной группы ЭО стереопары.
Формулы прямой фотограмметрической засечки (ПФЗ) являются
теоретической основой построения модели местности. Действительно,
по определению модель местности является совокупностью точек –
пересечений одноимённых проектирующих лучей. Именно координаты
таких точек определяют по формулам ПФЗ.
ЭО фотоснимков в большинстве случаев неизвестны. Поэтому
необходимо искать другой путь построения модели местности. Такой
путь очевиден. Необходимо найти теоретическое описание пересечения
одноимённых проектирующих лучей.
21. 4. Уравнения и элементы взаимного ориентирования снимков (ЭВзО).
4. УРАВНЕНИЯ И ЭЛЕМЕНТЫ ВЗАИМНОГООРИЕНТИРОВАНИЯ СНИМКОВ (ЭВЗО).
Z
Y
S2
Z
Y
X
R0
R2
X
S1
о2
R1
о1
Р1
а2
а1
WA
A
Рис. 11
Для построения геометрической
модели
местности
достаточно
установить фотоснимки в такое
положение,
чтобы
одноимённые
проектирующие лучи пересекались.
Пусть по фотоснимкам Р1 и Р2
(рис.11) построена модель местности.
Проведём
через
базис
фотографирования и проектирующий
луч S1а1 плоскость WA. Очевидно, что в
этой же плоскости будет находиться и
второй проектирующий луч S2а2, иначе
они не пересекутся.
Таким образом, необходимым
условием пересечения одноимённых
проектирующих лучей
является их
нахождение
в
одной
базисной
плоскости.
Условие
пересечения
одноимённых проектирующих лучей
означает, что векторы R0, R1 и R2
компланарны.
22.
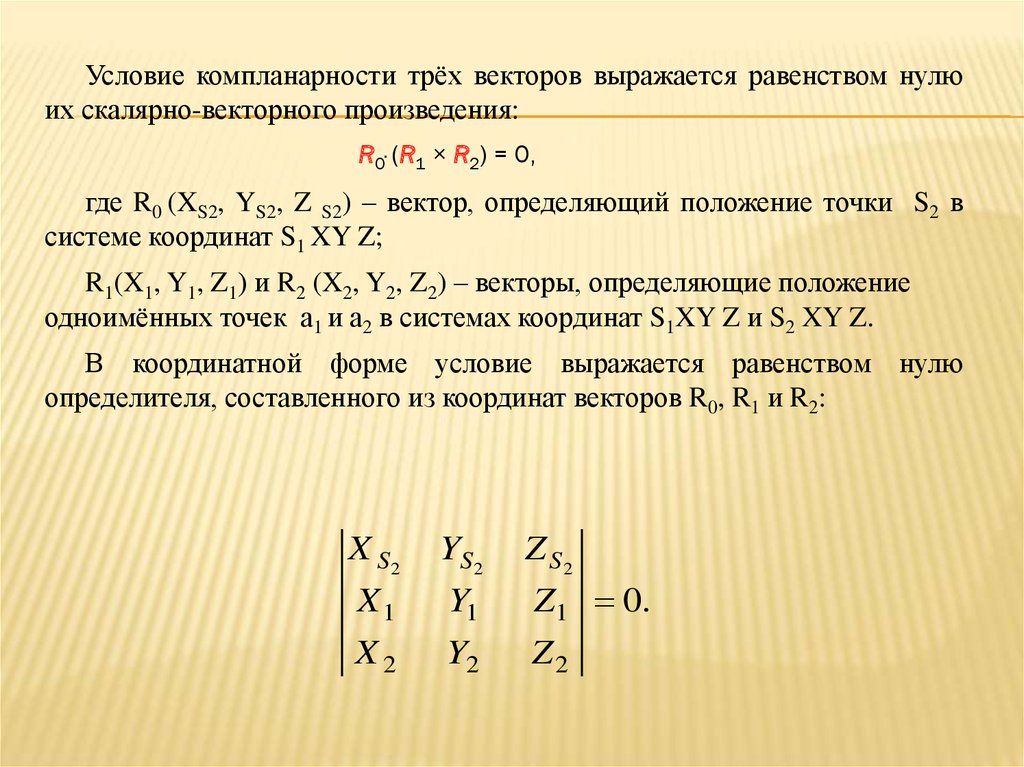
Условие компланарности трёх векторов выражается равенством нулюих скалярно-векторного произведения:
R0· (R1 × R2) = 0,
где R0 (XS2, YS2, Z S2) – вектор, определяющий положение точки S2 в
системе координат S1 XY Z;
R1(X1, Y1, Z1) и R2 (X2, Y2, Z2) – векторы, определяющие положение
одноимённых точек а1 и а2 в системах координат S1XY Z и S2 XY Z.
В координатной форме условие выражается равенством нулю
определителя, составленного из координат векторов R0, R1 и R2:
X S2
YS2
Z S2
X1
Y1
Z1 0.
X2
Y2
Z2
23.
Следовательно, условие пересечения одноимённых проектирующихлучей связывает между собой только направления проектирующих лучей с
направлением базиса.
Как следует из сравнения зависимостей длина базиса не влияет на
пересечение одноимённых проектирующих лучей и может принимать
произвольные значения. Поэтому при сохранении условия (4.1)
совокупность пересечений всех одноимённых проектирующих лучей
образует модель местности определённого масштаба.
Это положение позволяет сделать важный вывод:
для построения модели местности достаточно расположить фотоснимки
друг относительно друга так, чтобы каждая пара одноимённых
проектирующих лучей пересекалась, базис при этом может иметь
произвольную длину.
24.
Под взаимным ориентированием будем подразумевать установкуфотоснимков стереопары в такое положение, при котором каждая пара
одноимённых проектирующих лучей пересекается.
Добиться пересечения одноимённых проектирующих лучей можно,
например, с помощью ЭВО фотоснимков :
Xs1, Ys1, Zs1, α1, ω1, κ1 и
Xs2, Ys2, Zs2, α2, ω2, κ2.
Если ЭВО стереопары фотоснимков определены относительно
геодезической СК координат, то ориентировка модели и её масштаб
будут известны.
Если ЭВО определяют положение фотоснимков в фотограмметрической
СК, то для определения модели и её ориентирования относительно
геодезической СК потребуются дополнительные действия.
25.
Взаимное же положение фотоснимков, как в 1-м, так и вослучаях характеризуется разностями их ЭВО:
2-м
2 1 ;
2 1 ;
2 1 ;
X S2 X S1 X S B X ;
YS2 YS1 Y BY ;
Z S2 Z S1 Z BZ .
Разности
угловых
ЭВО
фотоснимков
определяют
их
пространственную ориентировку в заданной СК.
Разности линейных ЭВО фотоснимков, т. е. составляющие BX, By и
BZ, определяют направление базиса и его длину.
26.
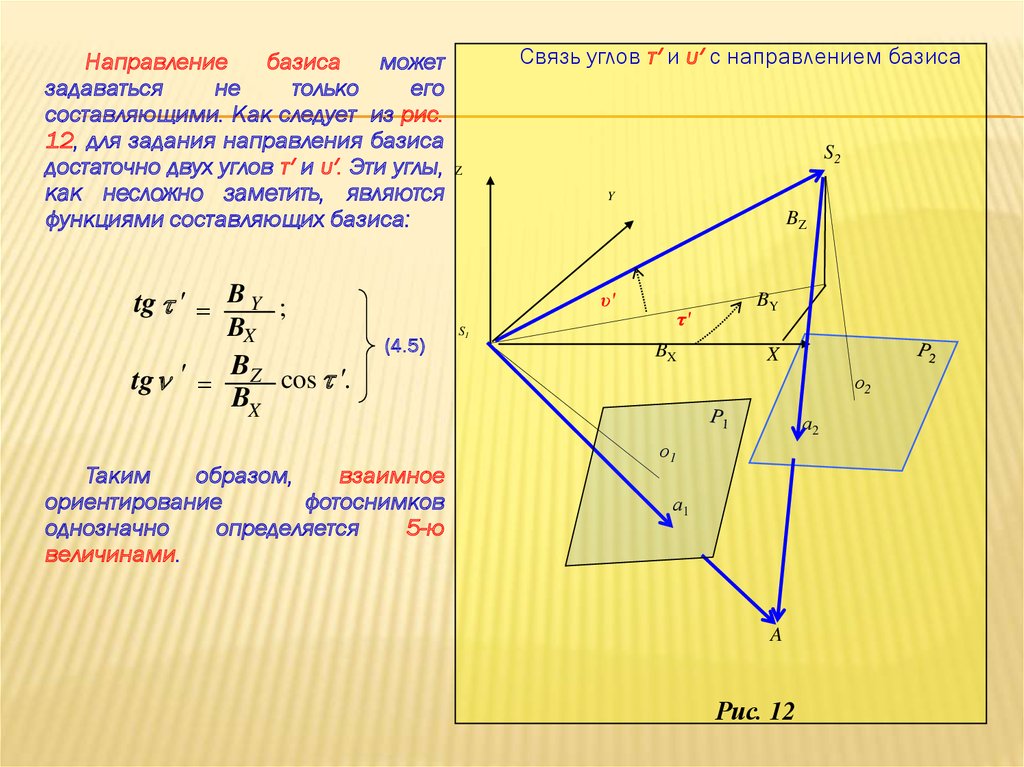
Направлениебазиса
может
задаваться
не
только
его
составляющими. Как следует из рис.
12, для задания направления базиса
достаточно двух углов τ′ и υ′. Эти углы,
как несложно заметить, являются
функциями составляющих базиса:
Связь углов τ′ и υ′ с направлением базиса
Y
BZ
tg t B Y ;
BX
B
tgn Z cos t .
BX
S2
Z
υ′
(4.5)
Таким
образом,
взаимное
ориентирование
фотоснимков
однозначно
определяется
5-ю
величинами.
τ′
S1
BX
BY
X
о2
а2
о1
а1
A
Рис. 12
27.
Величины, определяющие взаимное положение фотоснимков стереопары, при которомкаждая пара одноимённых проектирующих лучей пересекается, называются элементами
взаимного ориентирования (ЭВзО).
На практике используют две
зависимости от выбранной СК.
системы (группы) ЭВзО стереопары фотоснимков в
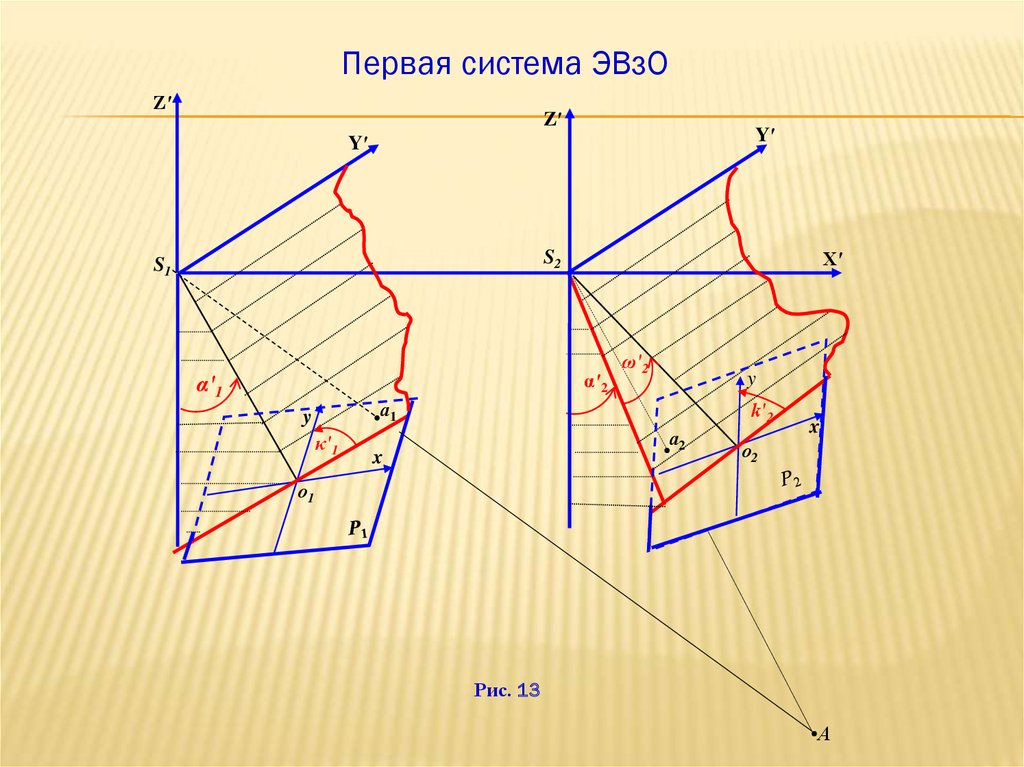
Для 1-й группы ЭВзО СК выбирается так:
начало СК совмещено с центром проекции S1 левого фотоснимка стереопары;
ось X направлена вдоль базиса;
ось Z находится в главной базисной плоскости левого фотоснимка стереопары;
ось Y дополняет СК до правой.
ЭВзО 1-й группы являются:
α′1 – продольный угол наклона левого фотоснимка Р1;
κ′1 – угол поворота левого фотоснимка Р1;
α′2 – продольный угол наклона фотоснимка Р2;
ω′2 – взаимный поперечный угол наклона правого фотоснимка Р2;
k′2 – угол поворота правого фотоснимка Р2.
28.
Первая система ЭВзОZ′
Z′
Y′
Y′
X′
S2
α′2
α′1
ω′2
y
а1
y
κ′1
k′2
а2
x
x
S1
о2
о1
Рис. 13
А
29.
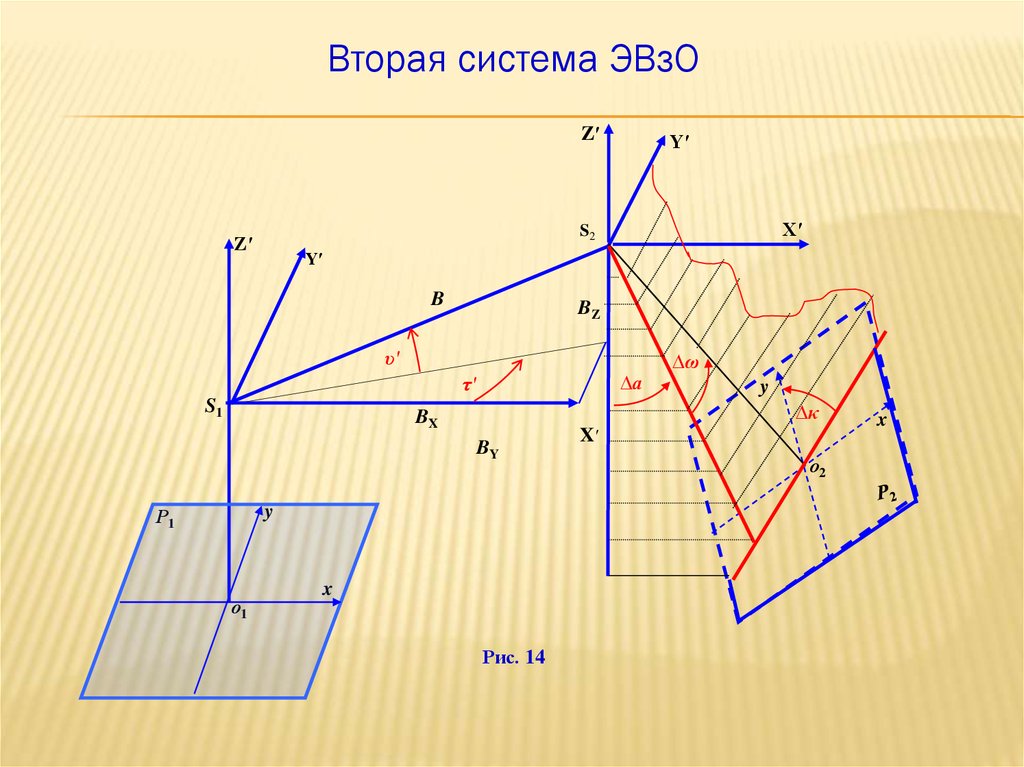
2-я группа ЭВзО определяется относительно СК с началом в точке S1, а оси X′ и Y′параллельны осям системы плоских координат левого фотоснимка Р1 стереопары
(рис.5).
ЭВзО второй группы являются:
∆α – взаимный продольный угол наклона фотоснимков – угол между осью Z′ и
проекцией главного луча правой связки на плоскость X′Z′.
∆ω – взаимный поперечный угол наклона фотоснимков – угол между проекцией
главного луча правой связки на плоскость X′Z′ и самим главным лучом S2о2;
∆κ – взаимный угол поворота фотоснимков – угол в плоскости правого фотоснимка
между осью у и следом плоскости S2о2Y′.
τ′ – условный дирекционный угол базиса проектирования – это угол в плоскости
S2 X′Y′ между осью X′ и проекцией базиса S1S2 на плоскость S2 X′Y′;
υ′ – угол наклона базиса проектирования – угол между базисом проектирования
S1 S2 и плоскостью S2 X′Y′.
30.
Вторая система ЭВзОZ′
Y′
X′
S2
Z′
Y′
B
BZ
υ′
∆а
τ′
S1
BY
y
о1
y
∆κ
BX
Р1
∆ω
x
Рис. 14
X′
о2
x
31.
Для определения ЭВзО необходимо знать ихсвязи с теми величинами, которые можно
измерить по фотоснимкам. ЭВзО определяют
относительно СК, которые связаны со стереопарой
фотоснимков. По фотоснимкам можно измерять
только плоские прямоугольные координаты.
Поэтому необходимо получить зависимости,
которые
связывают
ЭВзО
и
плоские
прямоугольные координаты точек фотоснимков
стереопары.
32.
Зависимости, связывающие ЭВзО с координатамиодноимённых точек фотоснимков стереопары, принято
называть уравнениями взаимного ориентирования.
Вид уравнения взаимного ориентирования зависит от
способа представления условия пересечения одноимённых
проектирующих лучей, от принятой системы ЭВзО, способа
решения задачи и др. Определяющее значение имеет
используемая при этом группа ЭВзО. В связи с этим будем
рассматривать уравнения первым и вторым способами.
33.
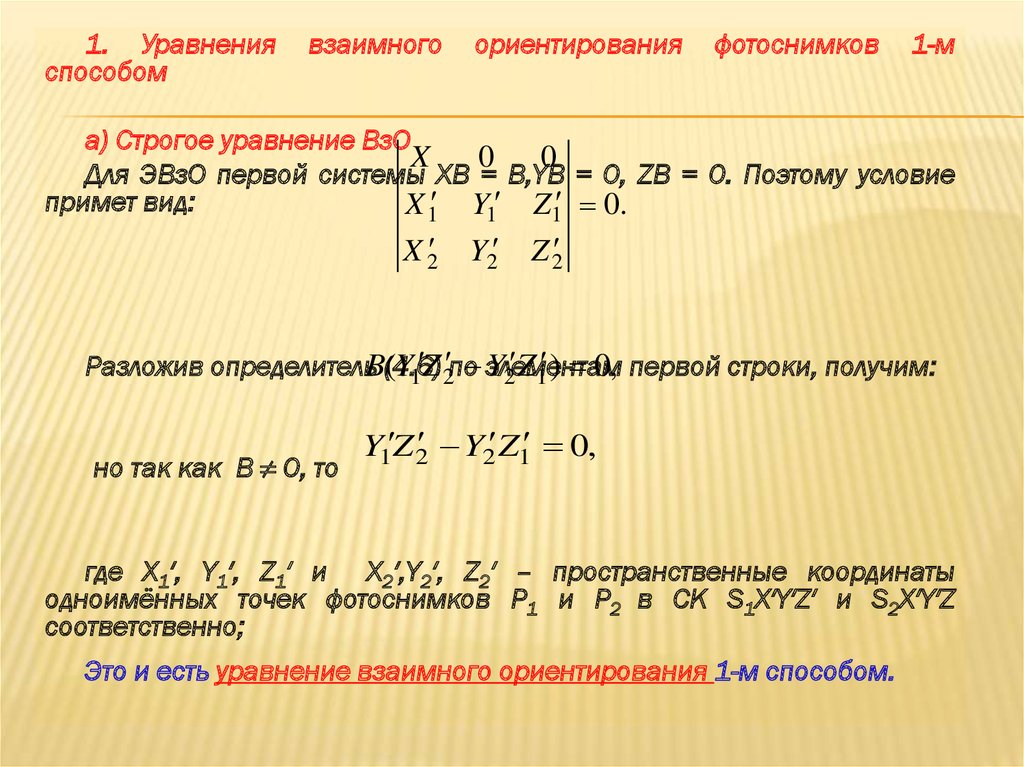
1. Уравненияспособом
взаимного
ориентирования
фотоснимков
1-м
а) Строгое уравнение ВзО
X
0 0
Для ЭВзО первой системы XВ = В,YВ = 0, ZВ = 0. Поэтому условие
примет вид:
X 1 Y1 Z1 0.
X 2
Y2
Z 2
(Y1 Z 2 по элементам
Y2 Z1 ) 0, первой строки, получим:
Разложив определительB(4.6)
но так как В ≠ 0, то
Y1 Z 2 Y2 Z1 0,
где X1′, Y1′, Z1′ и X2′,Y2′, Z2′ – пространственные координаты
одноимённых точек фотоснимков Р1 и Р2 в СК S1X′Y′Z′ и S2X′Y′Z
соответственно;
Это и есть уравнение взаимного ориентирования 1-м способом.
34.
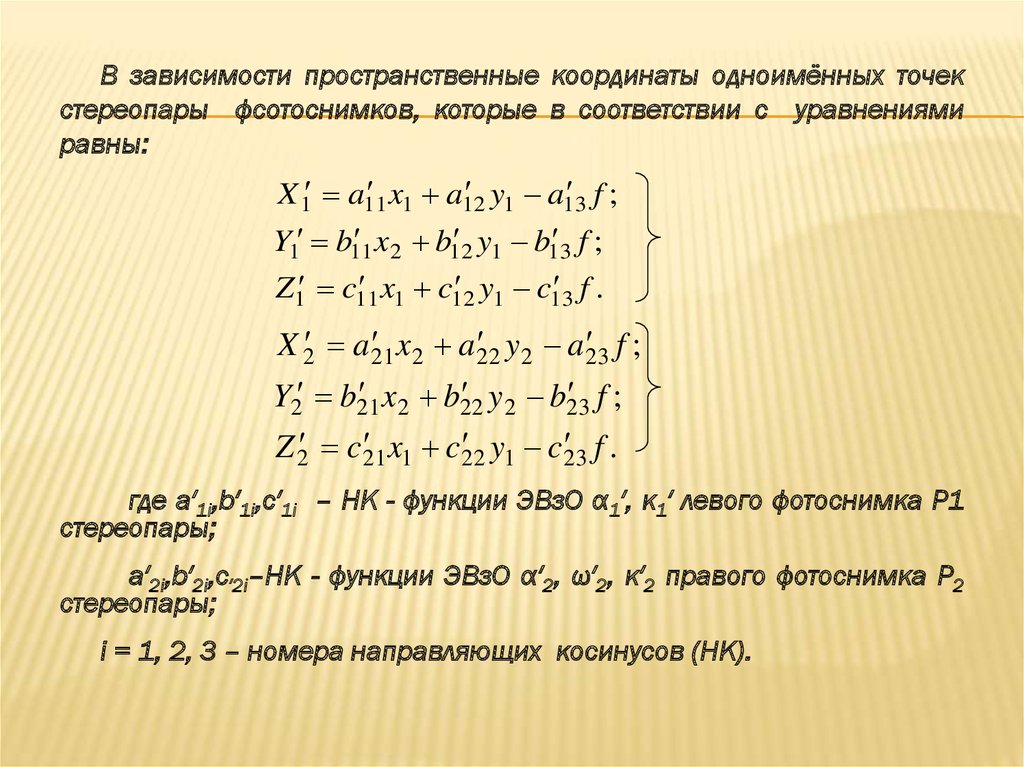
В зависимости пространственные координаты одноимённых точекстереопары фсотоснимков, которые в соответствии с уравнениями
равны:
x1 a12
y1 a13
f;
X 1 a11
x 2 b12
y1 b13
f;
Y1 b11
x1 c12
y1 c13
f.
Z1 c11
x 2 a 22
y 2 a 23
f;
X 2 a 21
x 2 b22
y 2 b23
f;
Y2 b21
x1 c 22
y1 c 23
f.
Z 2 c 21
где a′1i,b′1i,c′1i – НК - функции ЭВзО α1′, κ1′ левого фотоснимка P1
стереопары;
a′2i,b′2i,c′2i–НК - функции ЭВзО α′2, ω′2, κ′2 правого фотоснимка P2
стереопары;
i = 1, 2, 3 – номера направляющих косинусов (НК).
35.
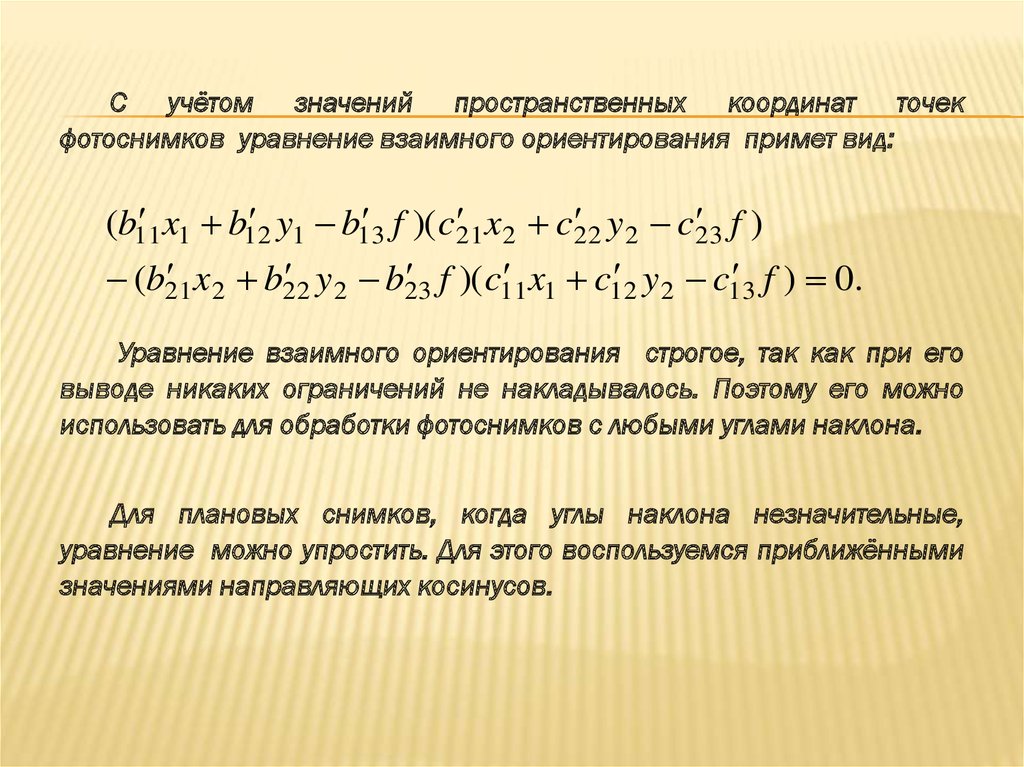
С учётом значений пространственных координат точекфотоснимков уравнение взаимного ориентирования примет вид:
x1 b12
y1 b13
f )( c21
x2 c22
y 2 c 23
f)
(b11
x2 b22
y 2 b23
f )( c11
x1 c12
y 2 c13
f ) 0.
(b21
Уравнение взаимного ориентирования строгое, так как при его
выводе никаких ограничений не накладывалось. Поэтому его можно
использовать для обработки фотоснимков с любыми углами наклона.
Для плановых снимков, когда углы наклона незначительные,
уравнение можно упростить. Для этого воспользуемся приближёнными
значениями направляющих косинусов.
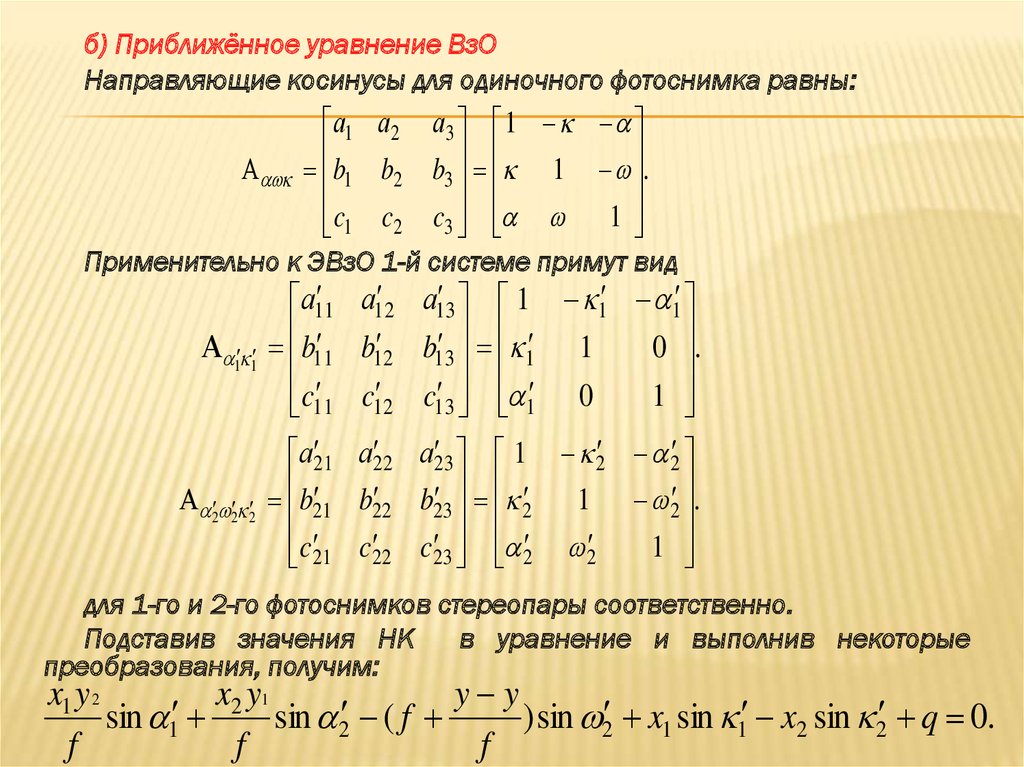
36.
б) Приближённое уравнение ВзОНаправляющие косинусы для одиночного фотоснимка равны:
а1 а2 а3 1
b1 b2 b3 1 .
c1 c2 c3 1
Применительно к ЭВзО 1-й системе примут вид
1 1
2 2 2
а11
b11
c11
а21
b21
c21
а13
1 1 1
а12
.
b13
1 1
b12
0
c13
1 0
c12
1
а23
1 2 2
а22
b23
2
2 .
b22
1
c23
2 2
c22
1
для 1-го и 2-го фотоснимков стереопары соответственно.
Подставив значения НК
в уравнение и выполнив некоторые
преобразования, получим:
x1 y 2
x2 y1
y y
sin 1
sin 2 ( f
) sin 2 x1 sin 1 x2 sin 2 q 0.
f
f
f
37.
В уравнениях ЭВзО связаны с координатами одноимённых точек иЭВнО фотоснимков. Так как ЭВнО, как правило, известны, то для
определения ЭВзО достаточно данных, относящихся к самой
стереопаре, а именно – плоских координат, которые могут бы быть
измерены по фотоснимкам.
Следовательно, для построения модели местности достаточно самих
фотоснимков стереопары.
38.
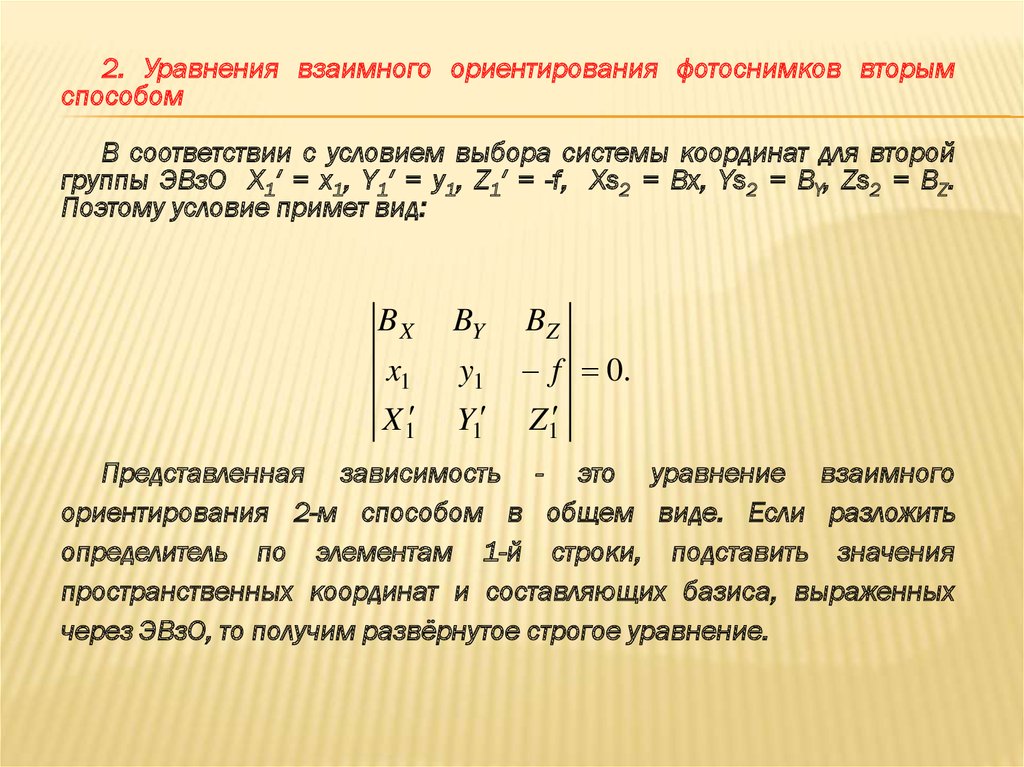
2. Уравнения взаимного ориентирования фотоснимков вторымспособом
В соответствии с условием выбора системы координат для второй
группы ЭВзО X1′ = x1, Y1′ = y1, Z1′ = -f, Xs2 = Вx, Ys2 = ВY, Zs2 = ВZ.
Поэтому условие примет вид:
BX
BY
BZ
x1
X 1
y1
Y1
f 0.
Z1
Представленная зависимость - это уравнение взаимного
ориентирования 2-м способом в общем виде. Если разложить
определитель по элементам 1-й строки, подставить значения
пространственных координат и составляющих базиса, выраженных
через ЭВзО, то получим развёрнутое строгое уравнение.
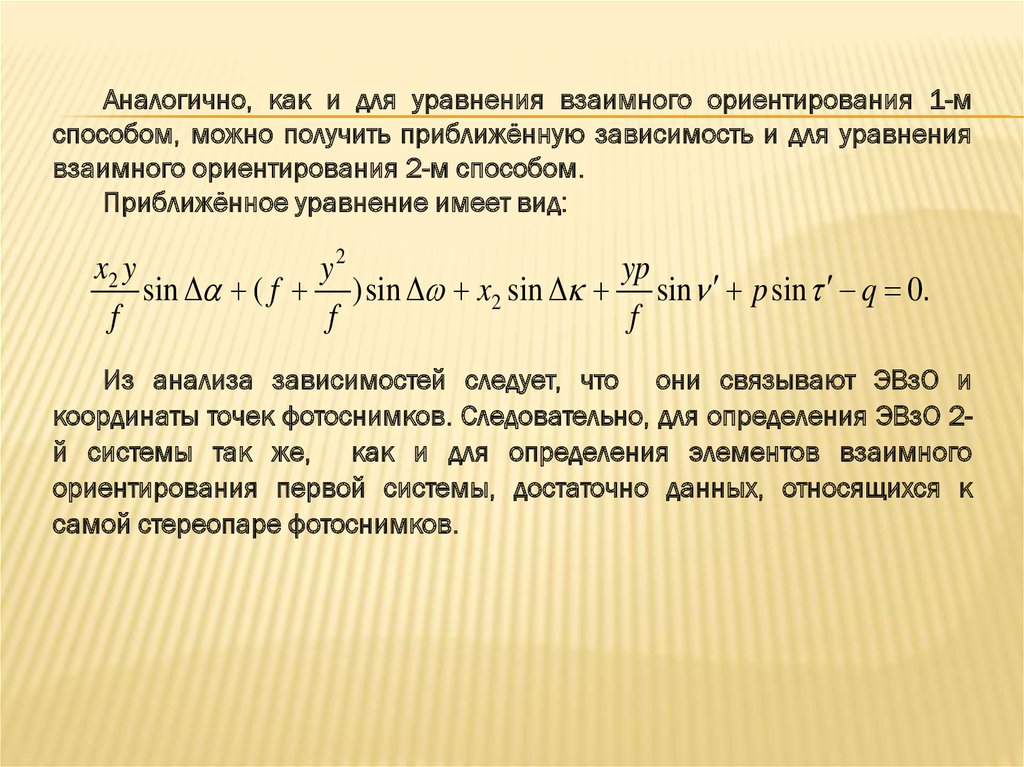
39.
Аналогично, как и для уравнения взаимного ориентирования 1-мспособом, можно получить приближённую зависимость и для уравнения
взаимного ориентирования 2-м способом.
Приближённое уравнение имеет вид:
x2 y
y2
yp
sin ( f ) sin x2 sin sinn p sin t q 0.
f
f
f
Из анализа зависимостей следует, что они связывают ЭВзО и
координаты точек фотоснимков. Следовательно, для определения ЭВзО 2й системы так же, как и для определения элементов взаимного
ориентирования первой системы, достаточно данных, относящихся к
самой стереопаре фотоснимков.
40.
Таким образом, вся необходимая информация для построениямодели местности по стереопаре фотоснимков, содержится в самой
стереопаре.
Очевидно, что для построения модели местности необходимо
определять ЭВзО, которые могут быть найдены как с использованием
строгих, так и приближённых зависимостей.
Обратим внимание, что приближённые уравнения взаимного
ориентирования более просты и удобны для решения, чем строгие
уравнения, однако пригодны они для обработки только плановых
фотоснимков.
Для решения задач современными методами приближённые
уравнения не применяются. Тем не менее, ни имеют практическое
значение, например, для априорной оценки точности построения
модели.
41. Определение ЭВзО стереопары фотоснимков по опорным точкам
ОПРЕДЕЛЕНИЕ ЭВЗО СТЕРЕОПАРЫ ФОТОСНИМКОВ ПООПОРНЫМ ТОЧКАМ
а) Определение ЭВзО первой системы.
Теоретическую основу строгого способа определения ЭВзО 1-й
системы составляет уравнение. Если измерить координаты точек
фотоснимков, то это уравнение можно представить в виде:
( 1 , 2 , 2 , 1 , 2 ) Y1 Z 2 Y2 Z1 0.
Допустим, что известны приближённые ЭВзО, которые обозначим
как α′01, α′02, ω′02, κ′01, κ′02. Найдём поправки к приближённым ЭВзВ
δα1′, δα2′, δω2′, δκ1′, δκ2′.
Уравнения ориентирования не линейны. Для приведения их к
линейному виду разложим зависимость в ряд Тейлора и при этом
ограничимся только членами первого порядка малости:
, 02
, 02
, 01
, 02
)
( 1 , 2 , 2 , 1 , 2 ) Y1 Z 2 Y2 Z1 0 ( 01
1
2
2
1
2 ... .
1
2
2
1
2
42.
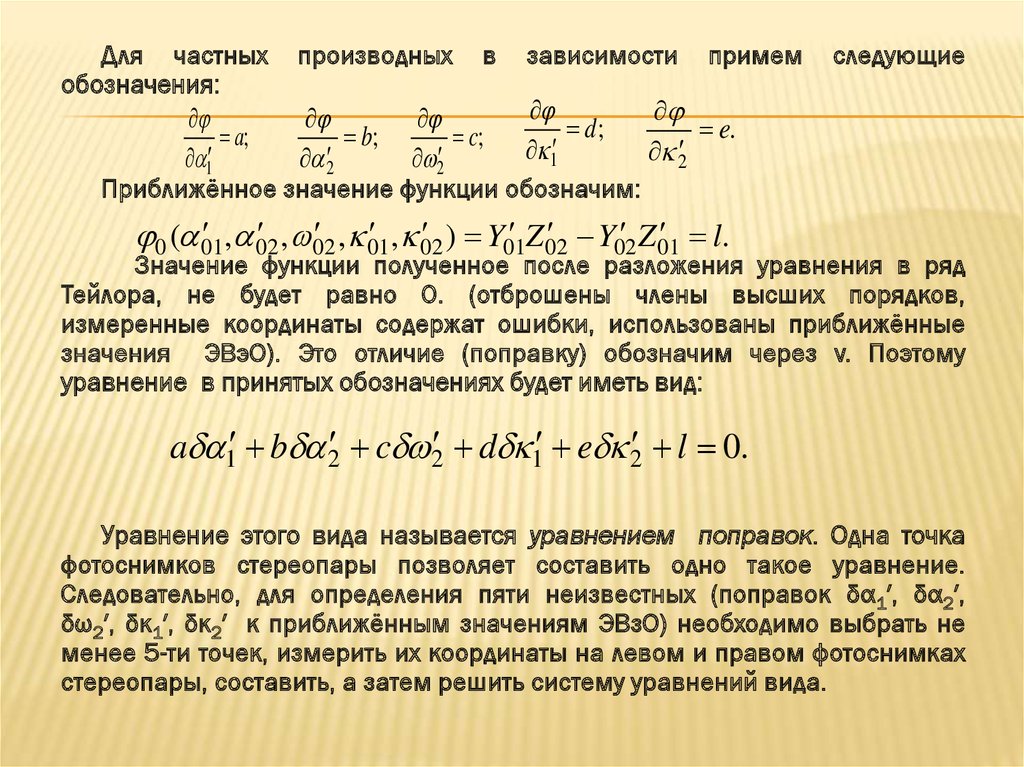
Для частных производных в зависимости примемобозначения:
d
;
e.
а;
b;
c;
1
2
1
2
2
Приближённое значение функции обозначим:
следующие
, 02
, 02
, 01
, 02
) Y01
Z 02
Y02
Z 01
l.
0 ( 01
Значение функции полученное после разложения уравнения в ряд
Тейлора, не будет равно 0. (отброшены члены высших порядков,
измеренные координаты содержат ошибки, использованы приближённые
значения ЭВэО). Это отличие (поправку) обозначим через v. Поэтому
уравнение в принятых обозначениях будет иметь вид:
a 1 b 2 c 2 d 1 e 2 l 0.
Уравнение этого вида называется уравнением поправок. Одна точка
фотоснимков стереопары позволяет составить одно такое уравнение.
Следовательно, для определения пяти неизвестных (поправок δα1′, δα2′,
δω2′, δκ1′, δκ2′ к приближённым значениям ЭВзО) необходимо выбрать не
менее 5-ти точек, измерить их координаты на левом и правом фотоснимках
стереопары, составить, а затем решить систему уравнений вида.
43.
а′1i,b′1i,с′1i – НК, вычисленные по ЭВзО α′1 и κ′1 левого фотоснимкастереопары;
а′2i,b′2i,с′2i – НК, вычисленные по ЭВзО α′2, ω′2 и κ′2
фотоснимка стереопары;
правого
i = 1,2,3 – номера НК.
Избыточное количество
определения ЭВзО.
точек
позволяет
повысить
точность
Однако следует помнить, что увеличение количества точек с 6 до 12
позволяет повысить точность примерно на
50 %. Дальнейшее
увеличение количества точек даёт незначительное повышение точности
определения ЭВзО, но значительно увеличивает объём работ по
измерению координат точек фотоснимков.
По вышеназванной причине принято считать, что оптимальное
количество точек для определения ЭВзО не должно превышать 12.
44. б) Сущность строгого способа определения ЭВзО второй системы
Б) СУЩНОСТЬ СТРОГОГО СПОСОБА ОПРЕДЕЛЕНИЯ ЭВЗО ВТОРОЙСИСТЕМЫ
Теоретическую основу строгого способа определения ЭВзО 2-й
системы составляет уравнение. B X BY BZ
x1 y1 f 0.
X 1 Y1 Z1
Разделим элементы 1-й строки определителя на ВХ:
С учётом зависимостей
определитель примет вид
x1
X 1
tgt
BY
;
BX
tgn
BZ
cost .
BX
1
tgt
x1
X 1
y1
Y1
1
tgn
cos t
f 0.
Z1
BY
BX
y1
Y1
BZ
BX
f 0.
Z1
45.
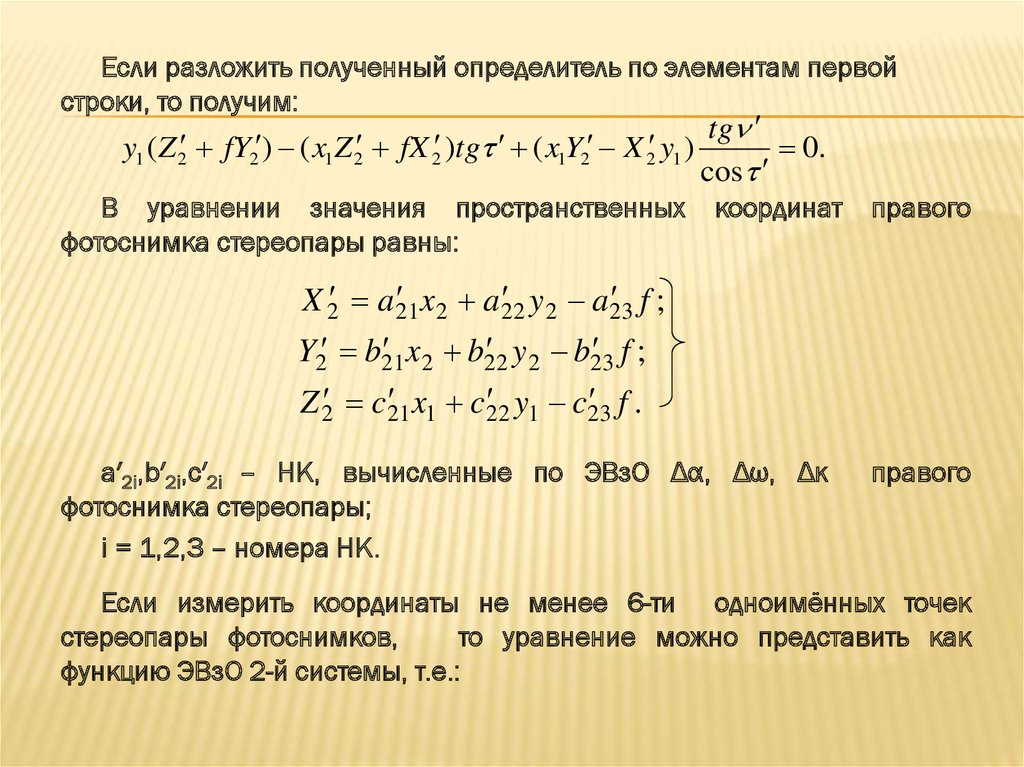
Если разложить полученный определитель по элементам первойстроки, то получим:
y1 ( Z 2 fY2 ) ( x1Z 2 fX 2 )tgt ( x1Y2 X 2 y1 )
В уравнении значения пространственных
фотоснимка стереопары равны:
tgn
0.
cost
координат
правого
x 2 a 22
y 2 a 23
f;
X 2 a 21
x 2 b22
y 2 b23
f;
Y2 b21
x1 c 22
y1 c 23
f.
Z 2 c 21
а′2i,b′2i,с′2i – НК, вычисленные по ЭВзО Δα, Δω, Δκ
фотоснимка стереопары;
i = 1,2,3 – номера НК.
правого
Если измерить координаты не менее 6-ти одноимённых точек
стереопары фотоснимков,
то уравнение можно представить как
функцию ЭВзО 2-й системы, т.е.:
46.
Уравнение взаимного ориентирование 2-й системы( , , ,t ,n )
y1 ( Z 2 fY2 ) ( x1Z 2 fX 2 )tgt ( x1Y2 X 2 y1 )
tgn
0.
cos t
Зависимость – это строгое уравнение взаимного ориентирования 2м способом в развёрнутом виде. Его необходимо привести к линейному
виду, затем определить частные производные – коэффициенты
уравнений поправок, а также свободные члены этих уравнений,
которые вычисляют по приближённым ЭВзО, используя уравнение.
После этого составляют и решают нормальные уравнения и вычисляют
последовательными
приближениями
неизвестные.
Иначе,
принципиально определение ЭВзО 2-й группы ничем не отличается от
определения ЭВзО 1-й группы.
47. Заключение
ЗАКЛЮЧЕНИЕЭлементы взаимного ориентирования стереопары фотоснимков имеют практическое
значение, так как позволяют установить фотоснимки в такое взаимное положение при
котором каждая пара одноимённых проектирующих лучей пересекается, т.е. может быть
построена модель местности.
Определив зависимости (уравнения взаимного ориентирования), связывающие ЭВзО
и плоские координаты точек фотоснимков, стало очевидным, что для определения ЭВзО
достаточно той информации, которая содержится в самой стереопаре.
Уравнения взаимного ориентирования служат теоретической основой способов
определения ЭВзО фотоснимков стереопары.
Теоретические основы взаимного ориентирования
стереопары фотоснимков
свидетельствуют о возможности установки фотоснимков в такое взаимное положение (как
в моменты фотографирования), при котором каждая пара одноимённых проектирующих
лучей пересекается. Это положение может быть зафиксировано ЭВзО.
ЭВзО могут быть определены по стереопаре без всяких дополнительных данных
(необходимо измерить плоские прямоугольные координаты точек фотоснимков и иметь
ЭВнО). Это означает , что для построения модели достаточно самой стереопары.
По стереопаре фотоснимков могут быть определены ЭВзО как приближённым, так и
строгим способами.