



 Физика
ФизикаПохожие презентации:
")


")






Необходимость и методы уравновешивания двс. (лекция 11)
1.
Лекция № 11. Необходимость и методы уравновешивания двс1. Условия уравновешенности двигателя.
2. Метод Ланчестера при уравновешивании.
3. Методы уравновешивания многоцилиндровых
рядных двигателей
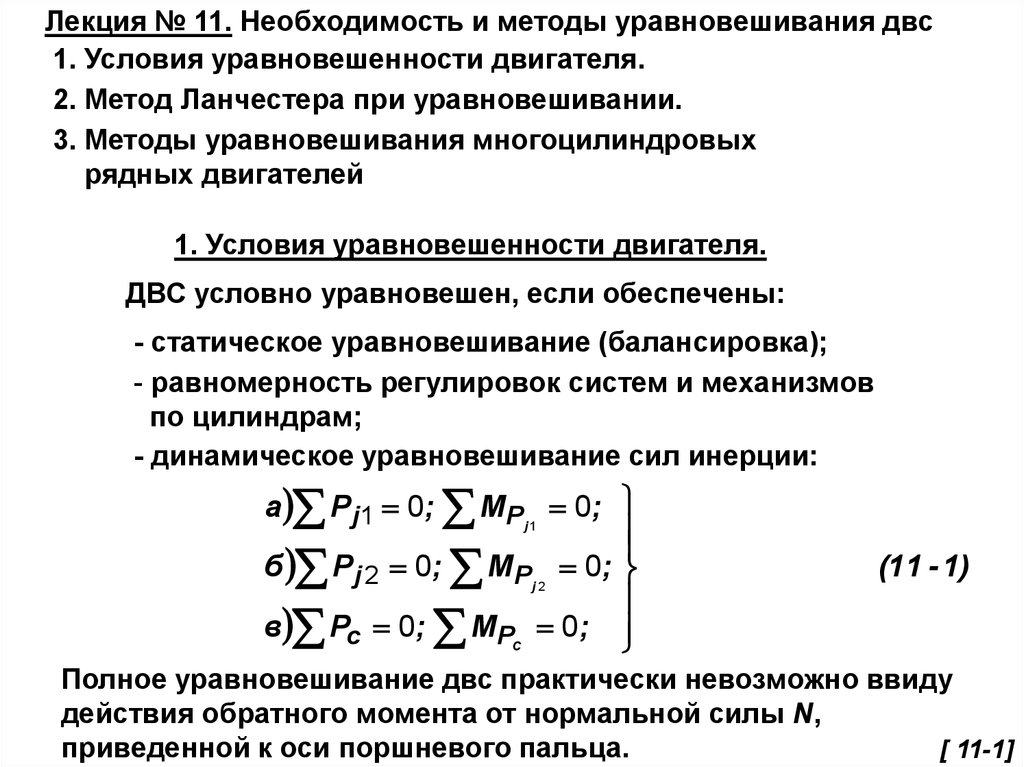
1. Условия уравновешенности двигателя.
ДВС условно уравновешен, если обеспечены:
- статическое уравновешивание (балансировка);
- равномерность регулировок систем и механизмов
по цилиндрам;
- динамическое уравновешивание сил инерции:
а P j 1 0; MPj 1 0;
б P j 2 0; MPj 2 0;
в Pc 0; MPC 0;
(11 - 1)
Полное уравновешивание двс практически невозможно ввиду
действия обратного момента от нормальной силы N,
приведенной к оси поршневого пальца.
[ 11-1]
2.
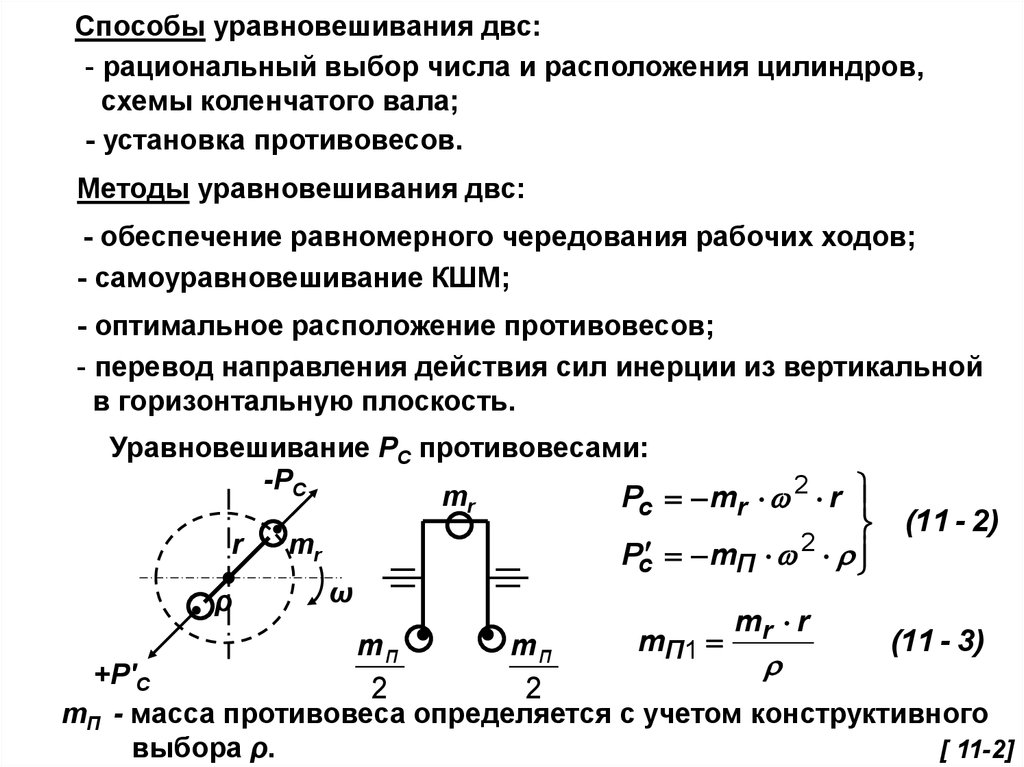
Способы уравновешивания двс:- рациональный выбор числа и расположения цилиндров,
схемы коленчатого вала;
- установка противовесов.
Методы уравновешивания двс:
- обеспечение равномерного чередования рабочих ходов;
- самоуравновешивание КШМ;
- оптимальное расположение противовесов;
- перевод направления действия сил инерции из вертикальной
в горизонтальную плоскость.
Уравновешивание PC противовесами:
-PC
mr
Pc mr 2 r
r
ρ
Pc mП
2
mr
ω
mП
2
mП
2
mП1
mr r
(11 - 2)
(11 - 3)
+P'C
mП - масса противовеса определяется с учетом конструктивного
выбора ρ.
[ 11-2]
3.
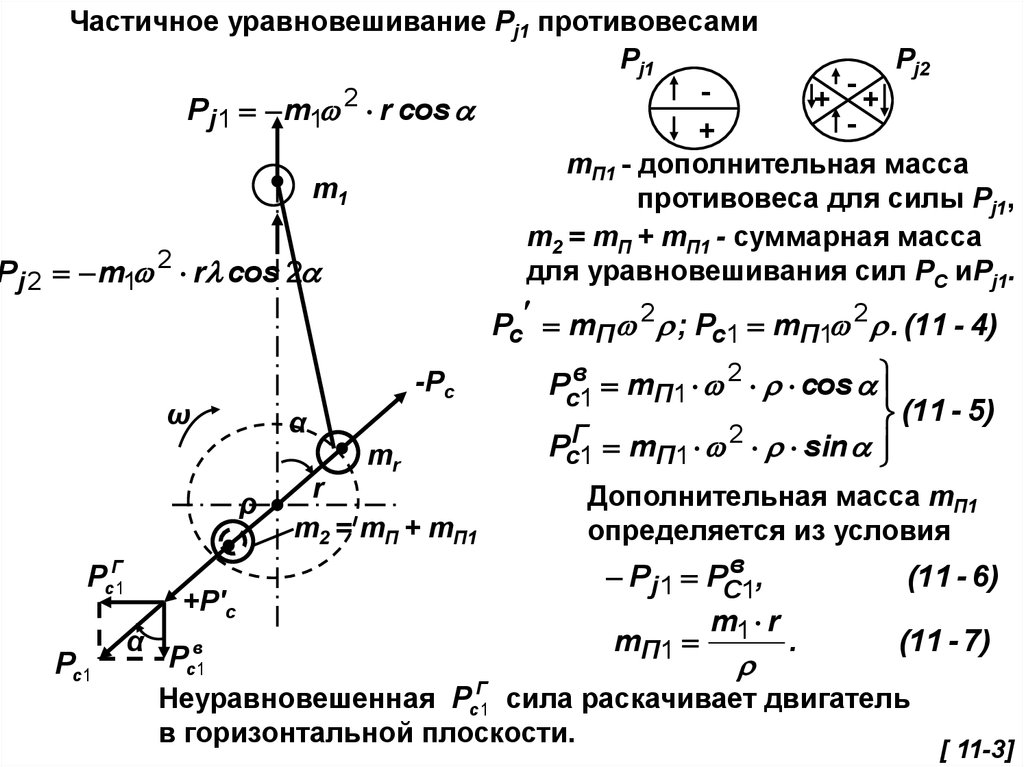
Частичное уравновешивание Pj1 противовесамиPj1
Pj2
2
+
+
P j1 m1 r cos
+
mП1 - дополнительная масса
m1
противовеса для силы Pj1,
m2 = mП + mП1 - суммарная масса
для уравновешивания сил PС иPj1.
P j 2 m1 2 r cos 2
Pc mП 2 ; Pc1 mП1 2 . (11 - 4)
Pcв1 mП1 2 cos
(11 - 5)
Г
2
Pc1 mП1 sin
-Pc
ω
α
mr
ρ
PcГ1
Pc1
r
m2 = mП + mП1
P j1 PCв1,
m1 r
mП1
.
+P'c
α
Pcв1
Дополнительная масса mП1
определяется из условия
Г
c1
(11 - 6)
(11 - 7)
Неуравновешенная P сила раскачивает двигатель
в горизонтальной плоскости.
[ 11-3]
4.
2. Метод Ланчестера при уравновешивании одноцилиндровогодвигателя.
Противовесы на
Pj1
щеках коленвала
mП уравновешивают
центробежную силу Pc
т.е. ΣPС =0.
Противовесы mП 1 на
Pj2
дополнительных валах
ω
ω
при угловой скорости ω
2ω
2ω
уравновешивают Pj1 ,
т.е. ΣPj1 =0.
2α
Rпр
mП1
α
ω
mП
mП2
Противовесы mП 2 на
дополнительных валах
при угловой скорости 2 ω
уравновешивают Pj2,
т.е. ΣPj2 =0.
Моменты от действия сил
инерции в одноцилиндровом
двигателе не возникают.
[ 11-4]
5.
3. Методы уравновешивания многоцилиндровыхрядных двигателей
3.1.Двигатель Р-2.
M
PC
Силы Pc двух цилиндров
взаимоуравновешиваются
ΣPc =0, однако создают момент
а
PС M P C
r
Pj1
ρ
Pj2 Pj2
mП
P'С
mП
M Pj 1
в
mП 2 в.
MP
C
1800
1
PС
(11 - 4)
Установкой противовесов
mП создается момент
Pj
P'С
MPC mr 2 r a.
1
2
(11 - 5)
Тогда ΣMPC =0 , т.е.
MP
C
mr 2 r a mП 2 в 0
Силы Pj1 также взаимно уравновешиваются
ΣPj1 =0, но создают опрокидывающий
момент в плоскости осей цилиндров
MPj1 Pj1 a.
Силы Pj2 , изменяясь синхронно, складываются
2
P
2
m
r cos 2
j2
1
и раскачивают двигатель в вертикальной плоскости.
(11 - 6)
11 - 7
[ 11-5]
6.
Уравновешивание опрокидывающего момента МРj1 и раскачиваниедвигателя силами Pj2 в вертикальной плоскости возможно
методом Ланчестера, т.е. установкой противовесов на
дополнительных валах.
При этом противовесы должны
MП1
создавать –MП1=МPj1, обеспечивая
mП2
выполнение условия ΣМРj1 =0,
М
2ω Рj1
а также противодействовать
mП1
ω ω
раскачиванию двигателя силами
Pj2 обеспечивая равенство
кшм
ω
Pj 2 2Pj 2 2mП 2 2 cos 2 0. (11 - 8)
Ввиду сложности конструктивного
исполнения метода Ланчестера
2ω
уравновешивание двухцилиндрового
рядного двигателя практически ограничивается установкой
противовесов на щеках коленчатого вала или в форме приливов
на маховике и шкиве привода вентилятора. Иногда массу
увеличивают для частичного перевода действия силы Pj1
в горизонтальную плоскость.
[ 11-6]
7.
3.2. Двигатель Р-4, (1-3-4-2).Pc
Pj1
Pj2
M PC
M Pj 1
M PC
M Pj 1 Pc
Pj1
Pj2
Pj1
Pc
Pj2
2ω mП
Pj1
Pc
Реализация условий
уравновешенности:
14
a ) P j1 0;
MPj 1 0;
б ) P j 2 4m1 2r cos 2 ;
Pj2
32
MPj 2 0.
в ) PC 0;
MPC 0;
Зеркальное расположение кривошипов через 1800 обеспечивает
самоуравновешивание по силам Pj1 и PС , а сумма сил Pj2
раскачивает двигатель в вертикальной плоскости.
Практически уравновешивание достигается:
- выбором формы коленвала;
- установкой противовесов на щеках коленвала для снижения
изгибающих моментов и нагрузок на коренные подшипники;
- иногда противовесами на дополнительных шестернях для
сил Pj2 (например двигатель А-41)
[ 11-7]
8.
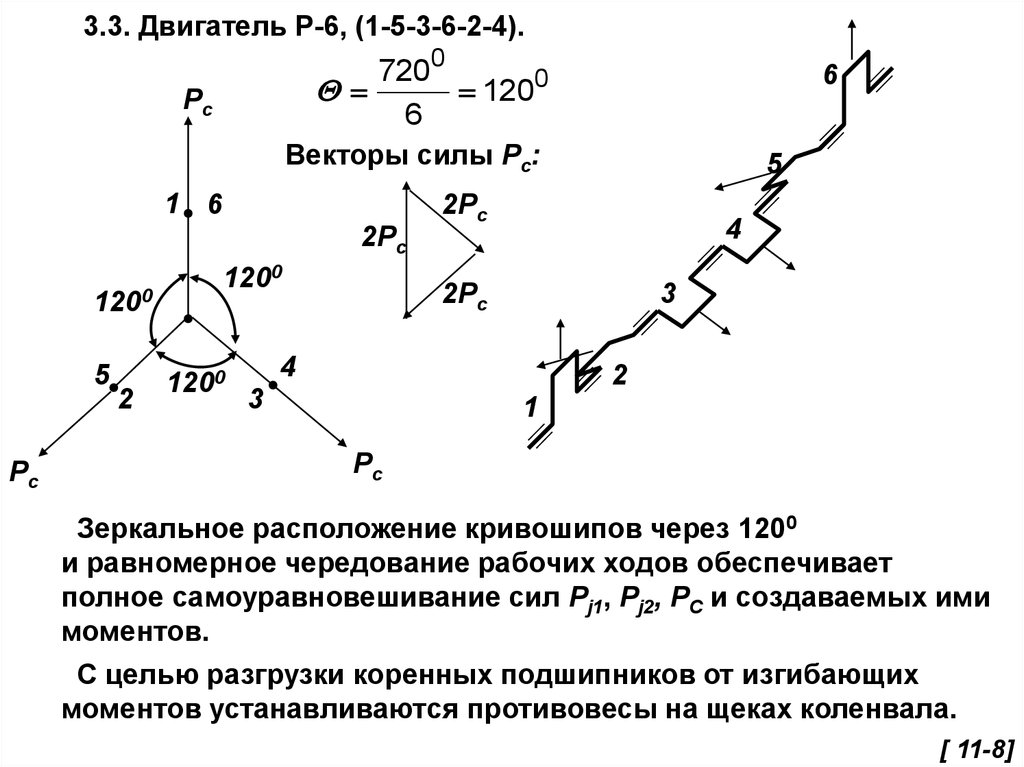
3.3. Двигатель Р-6, (1-5-3-6-2-4).7200
1200
6
Pc
6
Векторы силы Pc:
1 6
5
2Pc
4
2Pc
1200
5
Pc
2
1200
1200
2Pc
3
4
2
3
1
Pc
Зеркальное расположение кривошипов через 1200
и равномерное чередование рабочих ходов обеспечивает
полное самоуравновешивание сил Pj1, Pj2, PC и создаваемых ими
моментов.
С целью разгрузки коренных подшипников от изгибающих
моментов устанавливаются противовесы на щеках коленвала.
[ 11-8]