
 Электроника
ЭлектроникаПохожие презентации:
")



")


. Автоматизированное управление ХТС. Лекция 3")


Основы управления летательным аппаратом
1.
ХакатонNoManSky
Задача №1
Основы управления
летательным аппаратом
2.
Задача №1 – Постановка задачиПостановка задачи
Формулировка задачи:
Ознакомьтесь с основами управления летательным
аппаратом самолётного типа и разработайте
регуляторы
для
системы
автоматического
управления тангажом и креном БЛА.
Требуется реализовать:
• регулятор тангажа (5 баллов) –
осуществить разворот БЛА по тангажу с 0 до 15 град.
• регулятор крена (5 баллов) –
осуществить разворот БЛА по крену с 0 до 20 град.
2/7
3.
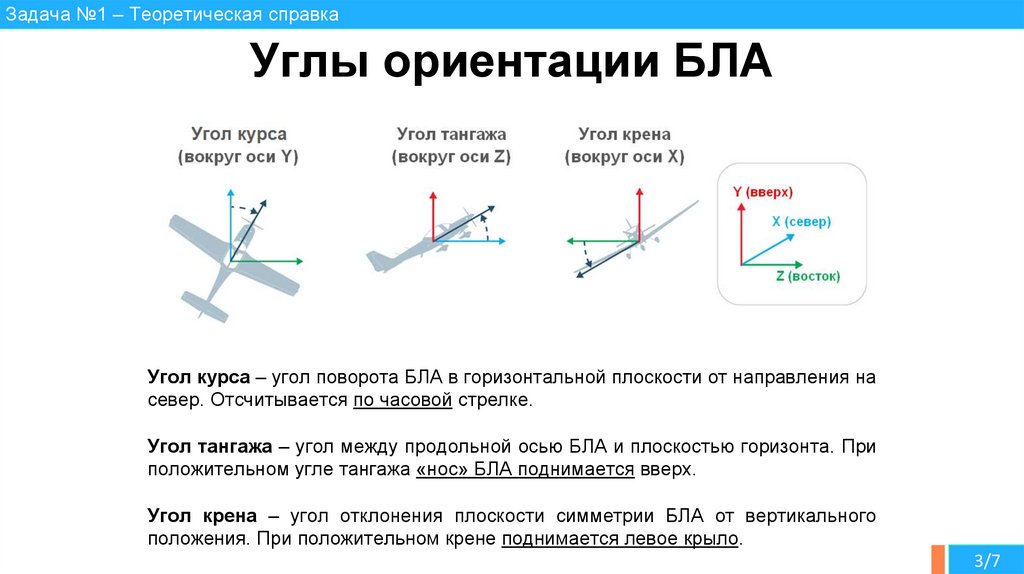
Задача №1 – Теоретическая справкаУглы ориентации БЛА
Угол курса – угол поворота БЛА в горизонтальной плоскости от направления на
север. Отсчитывается по часовой стрелке.
Угол тангажа – угол между продольной осью БЛА и плоскостью горизонта. При
положительном угле тангажа «нос» БЛА поднимается вверх.
Угол крена – угол отклонения плоскости симметрии БЛА от вертикального
положения. При положительном крене поднимается левое крыло.
3/7
4.
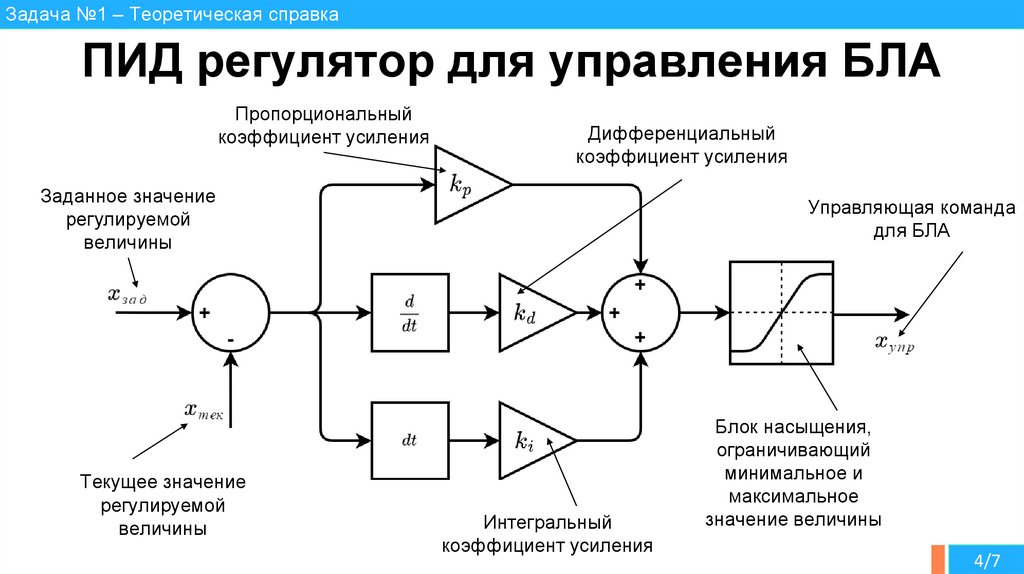
Задача №1 – Теоретическая справкаПИД регулятор для управления БЛА
Пропорциональный
коэффициент усиления
Дифференциальный
коэффициент усиления
Заданное значение
регулируемой
величины
Текущее значение
регулируемой
величины
Управляющая команда
для БЛА
Интегральный
коэффициент усиления
Блок насыщения,
ограничивающий
минимальное и
максимальное
значение величины
4/7
5.
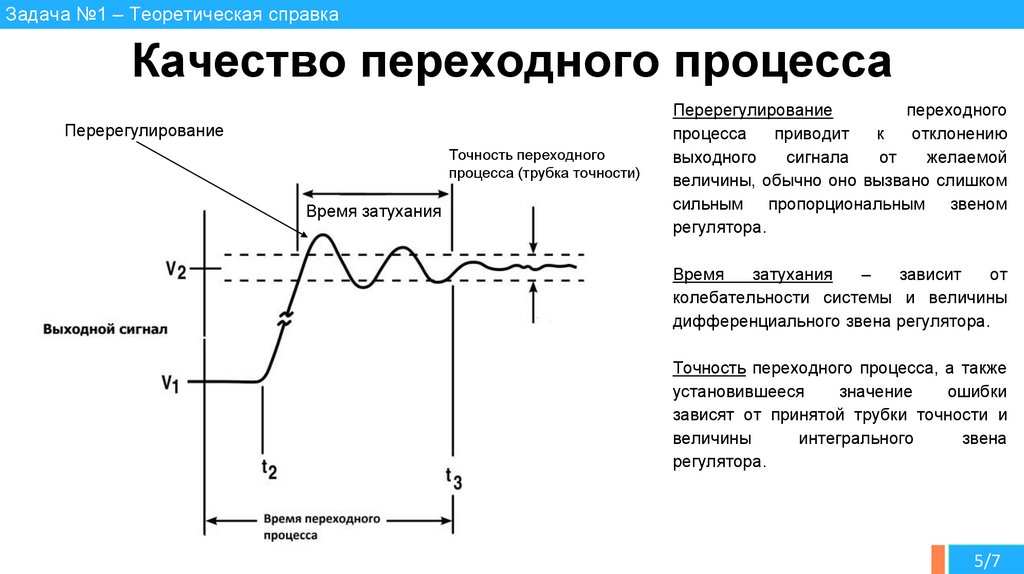
Задача №1 – Теоретическая справкаКачество переходного процесса
Перерегулирование
Точность переходного
процесса (трубка точности)
Время затухания
Перерегулирование
переходного
процесса
приводит
к
отклонению
выходного
сигнала
от
желаемой
величины, обычно оно вызвано слишком
сильным пропорциональным звеном
регулятора.
Время
затухания
–
зависит
от
колебательности системы и величины
дифференциального звена регулятора.
Точность переходного процесса, а также
установившееся
значение
ошибки
зависят от принятой трубки точности и
величины
интегрального
звена
регулятора.
5/7
6.
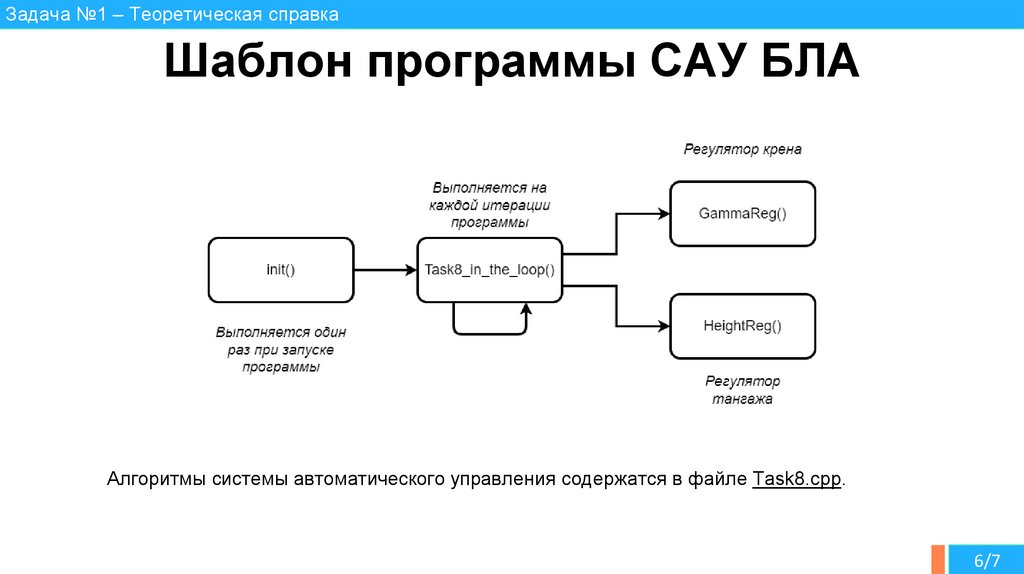
Задача №1 – Теоретическая справкаШаблон программы САУ БЛА
Алгоритмы системы автоматического управления содержатся в файле Task8.cpp.
6/7
7.
Задача №1 – Декомпозиция задачиАлгоритм решения
1. Разработать регулятор управления углом тангажа БЛА.
2. Подобрать коэффициенты регулятора.
3. Реализовать разворот БЛА по углу тангажа на 15 град.
4. Разработать регулятор управления углом крена БЛА.
5. Подобрать коэффициенты регулятора.
6. Реализовать разворот БЛА по углу крена на 20 град.
7. Отработать полученные алгоритмы на установке.
7/7