






 Электроника
ЭлектроникаПохожие презентации:










Анализ технологий поворота колесных роботов
1.
Министерство науки и высшего образования Российской ФедерацииФедеральное государственное бюджетное образовательное учреждение
высшего образования
«Московский государственный технический университет имени Н.Э.
Баумана
(национальный исследовательский университет)»
Факультет «Специальное машиностроение»
Кафедра «Многоцелевые гусеничные машины и мобильные роботы»
Анализ технологий поворота
колесных роботов
Студент: Федоровский Д.А.
Группа: СМ9-11м
Москва, 2023г.
2.
ВведениеОбъектом исследования является маневренность 4 колёсного
мобильного робота. Целью выполнения нир по теме является обзор
существующих способов поворота колёсной техники, выбор и
компьютерное моделирование интересующего метода
Анализ технологий поворота колесных роботов
2/11
3.
Анализ существующих конструктивных схем поворота колесных машинПоворот колёсных машин осуществляется тремя
основными способами:
1) поворотом плоскостей качения колёсных
движителей;
2) складыванием сочленённых звеньев;
3) изменением относительной скорости колёсных
движителей противоположных бортов.
4)комбинированным методом
Подповерхностный Радиолокационный Комплекс
3/11
4.
Поворот плоскостей качения колёсR
L
sin( H )
R
L
2sin( 1H )
Подповерхностный Радиолокационный Комплекс
4/11
5.
Складывание сочленённых звеньевR
L 1 cos c B
2 sin c
2
Подповерхностный Радиолокационный Комплекс
5/11
6.
7.
8.
Изменение относительной скорости колёсR 2 П ( B R2 )2 L2
Подповерхностный Радиолокационный Комплекс
8/11
9.
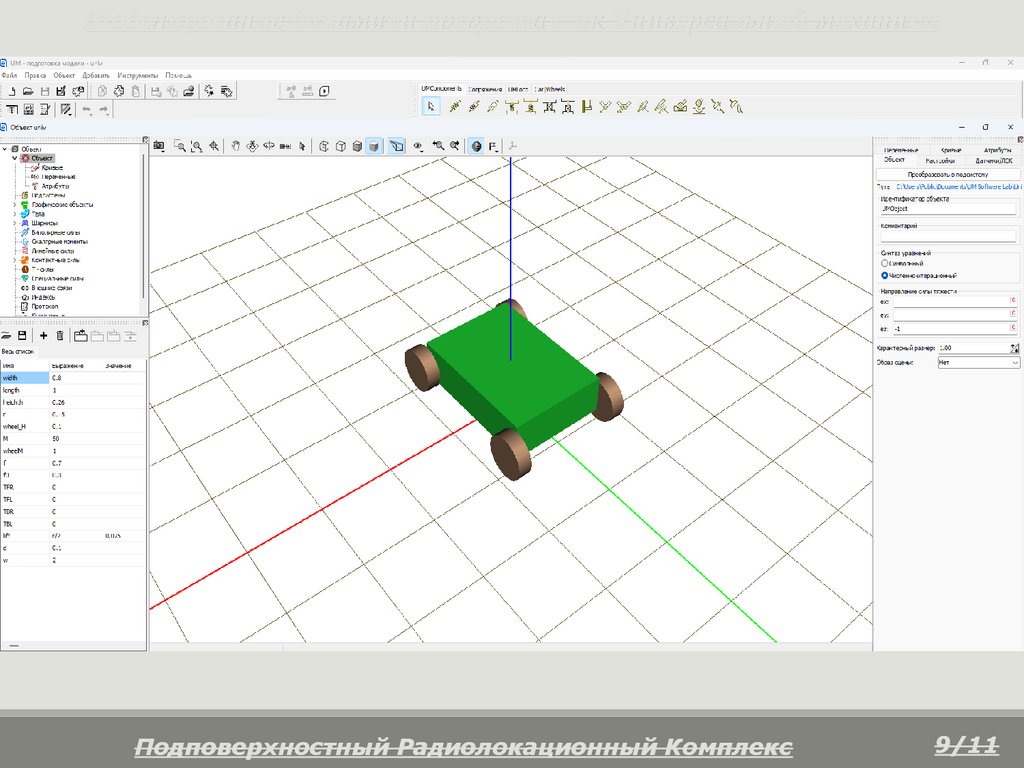
Моделирование динамики поворота в пк Универсальный механизмПодповерхностный Радиолокационный Комплекс
9/11
10.
Моделирование динамики поворота в пк Универсальный механизмПодповерхностный Радиолокационный Комплекс
10/11
10/11
11.
Моделирование динамики поворота в пк Универсальный механизмПодповерхностный Радиолокационный Комплекс
11/11
11/11
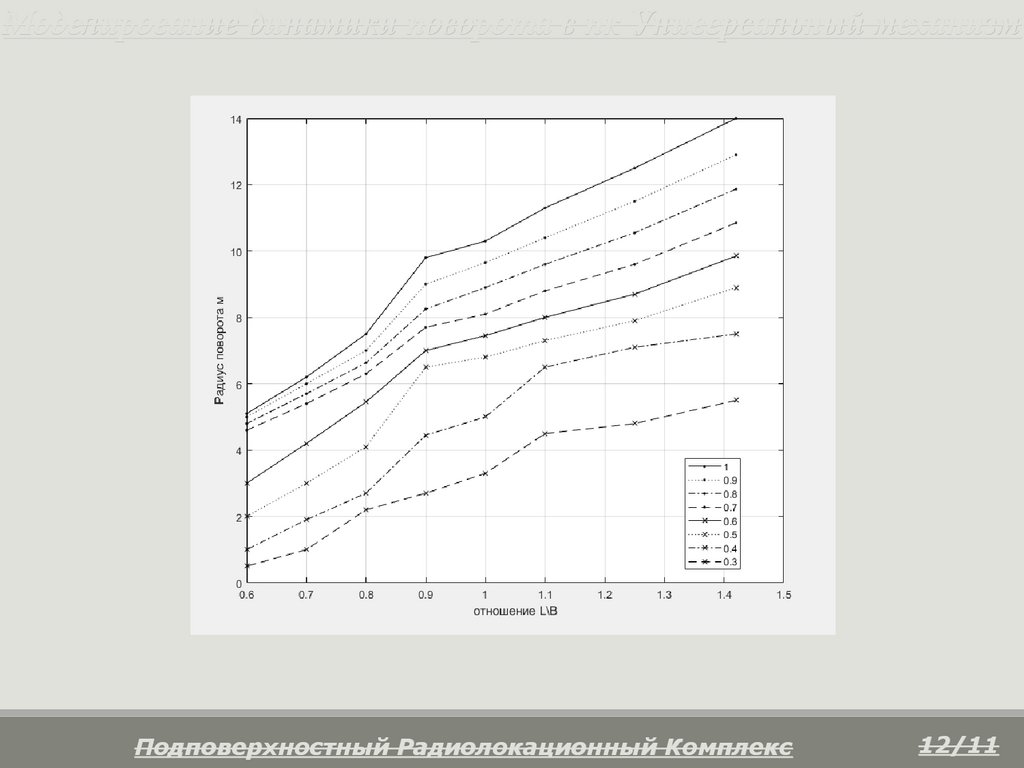
12.
Моделирование динамики поворота в пк Универсальный механизмПодповерхностный Радиолокационный Комплекс
12/11
12/11
13.
В этой работе описаны существующие методыповорота колёсного мобильного робота, и из них
выбран наиболее подходящий для наших целей.
После этого для ознакомления с зависимостями
параметров динамики МР от различных
характеристик был освоен и применён один из
способов их компьютерного моделирования, в
следствие чего была подтверждена корректность
моделирования путём сравнения данных полученых
с простых моделей с данными расчитаными с
применением математического аппарата.
Подповерхностный Радиолокационный Комплекс
13/11
13/11