
















 Электроника
ЭлектроникаПохожие презентации:










Роботы на колесном ходу. Разнообразие роботов
1.
2.
РАЗНООБРАЗИЕ РОБОТОВ• Всех роботов можно разделить на две большие
группы:
• стационарные роботы на фундаменте,
которые обычно используются в
промышленности, на линиях сборки и сварки
кузовных деталей автомобилей;
• мобильные роботы, которые могут
перемещаться и выполнять работу везде, куда
смогут добраться.
• Мобильные роботы различаются по способу
передвижения: есть передвигающиеся на
колёсах или гусеницах, шагающие, плавающие
и летающие.
3.
Мобильные роботы• Быстрые
• Маневренные
• Двигаются по
плоскости
• Реагируют на
препятствия
4.
РОБОТЫ НА КОЛЕСНОМ ХОДУКолесные роботы – это
мобильные устройства,
оснащенные колесами,
которые используются
в различных областях
для
выполнения
различных задач, от
промышленности до
исследований
и
развлечений.
5.
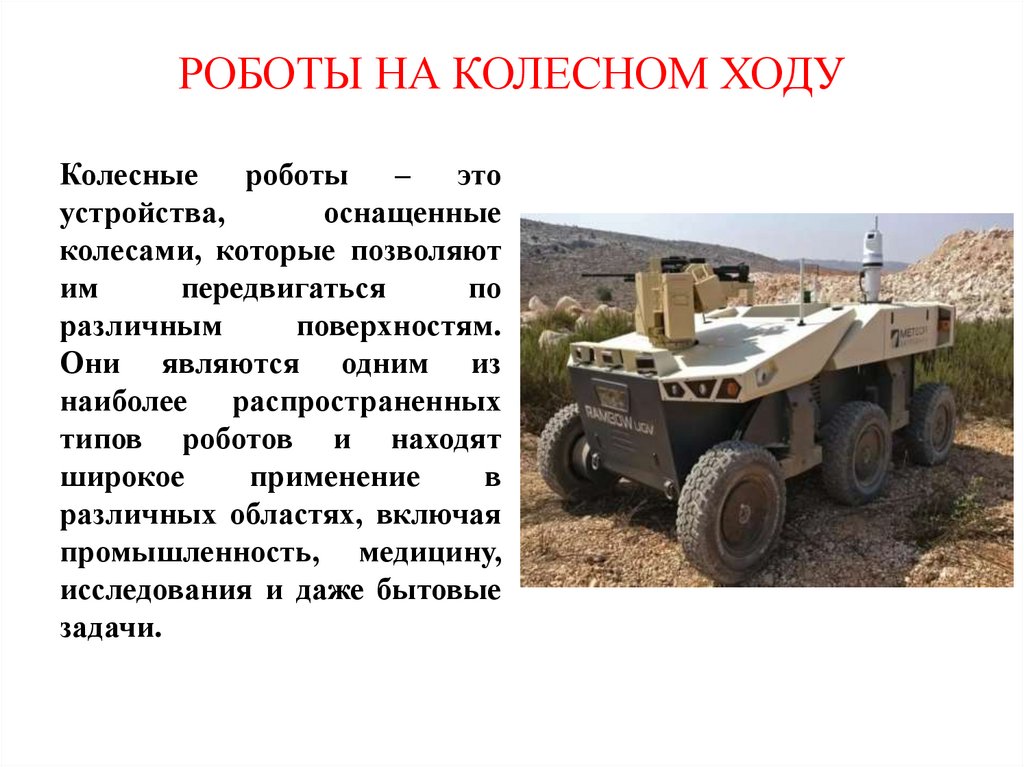
РОБОТЫ НА КОЛЕСНОМ ХОДУКолесные роботы – это
устройства,
оснащенные
колесами, которые позволяют
им
передвигаться
по
различным
поверхностям.
Они являются одним из
наиболее распространенных
типов роботов и находят
широкое
применение
в
различных областях, включая
промышленность, медицину,
исследования и даже бытовые
задачи.
6.
РОБОТЫ НА КОЛЕСНОМ ХОДУКолесные роботы могут иметь различные
конфигурации колес, включая одно колесо,
два колеса, три колеса или более. Они могут
быть также оснащены дополнительными
устройствами, такими как манипуляторы
или
сенсоры,
для
выполнения
специфических задач.
7.
РОБОТЫ НА КОЛЕСНОМ ХОДУОсновное преимущество колесных роботов
заключается
в
их
способности
к
маневрированию и передвижению по
различным
поверхностям.
Колеса
обеспечивают стабильность и позволяют
роботу перемещаться с высокой скоростью и
точностью.
8.
РОБОТЫ НА КОЛЕСНОМ ХОДУКолесные роботы могут быть автономными
или управляемыми оператором. Автономные
роботы способны принимать решения и
выполнять задачи без вмешательства человека,
используя встроенные алгоритмы и датчики.
Управляемые роботы требуют управления со
стороны оператора, который может управлять
им с помощью пульта или компьютера.
9.
Принцип работы колесных роботовКолесные роботы основаны на использовании колес для
передвижения и маневрирования. Они состоят из
нескольких основных компонентов, включая колеса,
двигатели (моторы), систему управления и датчики.
Колеса являются основным средством передвижения
колесных роботов. Они могут быть выполнены из
различных материалов, таких как резина или металл, и
иметь различные формы и размеры в зависимости от
конкретного применения робота. Колеса могут быть
приводимыми в движение с помощью двигателей или
моторов.
10.
Двигатели (моторы)Двигатели обеспечивают
вращение
колес
и
передвижение
робота.
Они
могут
быть
электрическими,
гидравлическими
или
пневматическими.
Электрические двигатели
наиболее распространены
и
обеспечивают
эффективное и точное
управление колесами.
11.
КонтроллерКонтроллер является мозгом
колесного
робота.
Она
отвечает за принятие решений
и управление движением
робота. Система управления
может быть программной,
основанной на алгоритмах и
искусственном интеллекте, или
же механической, основанной
на механических устройствах и
реакциях
на
внешние
воздействия.
12.
ДатчикиДатчики играют важную
роль в работе колесных
роботов. Они собирают
информацию
о
окружающей
среде
и
передают
ее
системе
управления. Датчики могут
быть различными, включая
датчики
расстояния,
датчики
приближения,
датчики цвета и датчики
угла поворота колес.
13.
Наш мобильный роботМотор B
Мотор С
Датчик
расстояния
Контроллер –
мозг робота
14.
Виды колесных роботовОдноколесный
робот,
представляет
собой
компактный, эффективный
и автономный вариант
городской мобильности.
Благодаря автоматической
системе
балансировки
способен
преодолевать
препятствия,
менять
направление
и
даже
подниматься и спускаться
по ступенькам.
15.
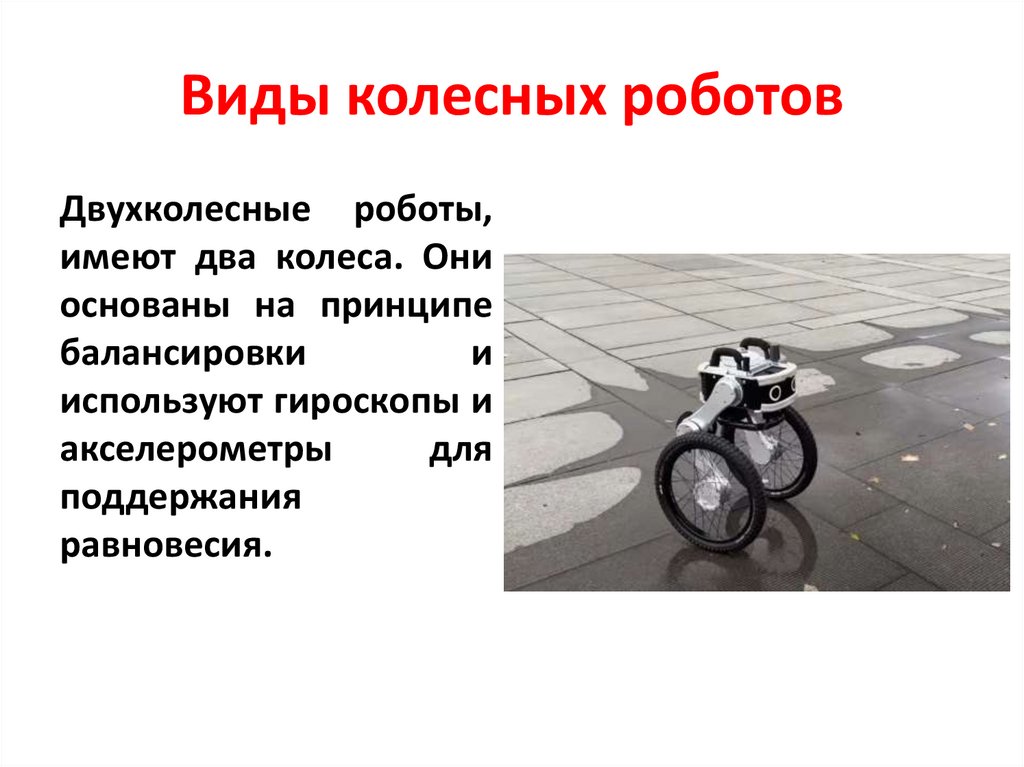
Виды колесных роботовДвухколесные роботы,
имеют два колеса. Они
основаны на принципе
балансировки
и
используют гироскопы и
акселерометры
для
поддержания
равновесия.
16.
Виды колесных роботовТрехколесные роботы имеют
три колеса, расположенных в
треугольной форме. Они
обеспечивают большую
стабильность и маневренность
по сравнению с
двухколесными роботами.
Трехколесные роботы широко
используются в
промышленности и логистике.
17.
Виды колесных роботовЧетырехколесные роботы
имеют четыре колеса,
расположенных
в
прямоугольной
форме.
Они
обеспечивают
большую стабильность и
грузоподъемность,
что
делает их идеальными
для работы на неровной
местности или в условиях
с большой нагрузкой.
18.
Виды колесных роботовМногоколесные
роботы
имеют более четырех колес
и могут иметь различные
конфигурации колес, такие
как
шестиколесные,
восьмиколесные или даже
более сложные. Эти роботы
обладают
высокой
маневренностью
и
способностью преодолевать
препятствия.
19.
Виды колесных роботовОмни-колесные роботы
имеют
специальные
колеса,
которые
позволяют им двигаться в
любом направлении без
необходимости поворота.
Они особенно полезны в
узких пространствах или
при
необходимости
мгновенного изменения
направления движения.
20.
ЗАДАНИЕ• 1. Вспомните, любое ли управляемое
устройство является роботом. Что представляет
себе человек, когда звучит‚ слово «робот»?