



")








 Механика
Механика Электроника
ЭлектроникаПохожие презентации:




")


")


Лекция 1-2. Основы механики электропривода
1. Лекция 1-2. ОСНОВЫ МЕХАНИКИ ЭЛЕКТРОПРИВОДА
2.
2.1 Уравнение движенияРассмотрим простейшую механическую
систему, состоящую из ротора двигателя и
непосредственно связанной с ним нагрузки
- рабочего органа машины.
3. Рис. 2.1. Модель механической части
4.
Так реализована механическая часть ряданасосов, вентиляторов, многих других
машин.
К такой модели можно привести
механическую часть большинства
электроприводов.
5.
К системе (рис. 2.1) приложены двамомента - электромагнитный момент М,
развиваемый двигателем, и момент Мс,
создаваемый нагрузкой и потерями
механической части (трение); каждый
момент имеет свою величину и
направление.
Движение системы определяется вторым
законом Ньютона:
d
M M c J
,(2.1)
dt
6.
- угловая скорость,J- суммарный момент инерции.
Правая часть уравнения (2.1) - динамический
момент
d
J
dt
M д ин
Возникает, если алгебраическая сумма М и
Мс ≠0; величина и знак динамического
момента определяют ускорение.
Режимы, при которых Σ M=0, т.е. моменты
М и Мс равны по величине и
противоположно направлены, называют
установившимися или статическими, им
соответствует ω= const, в том числе ω=0.
7.
Режимы, когда ΣM≠0 - переходные илидинамические (ускорение, замедление).
В уравнении (2.1) Мс полностью определяется
свойствами нагрузки, а момент М, который
можно принять за независимую переменную,
формируется двигателем. Скорость зависимая переменная; определяется в
динамических режимах решением (2.1) для
любых конкретных условий, а в статических
режимах находится из условия:
M ( ) M c ( ) 0
8. 2.2 Приведение моментов и моментов инерции
Между двигателем и нагрузкой находитсякакая-либо механическая передача
9. т.е. имеется несколько различных валов со своими моментами и скоростями. Для сведения любой реальной системы к простейшей модели (рис. 2.1)
10.
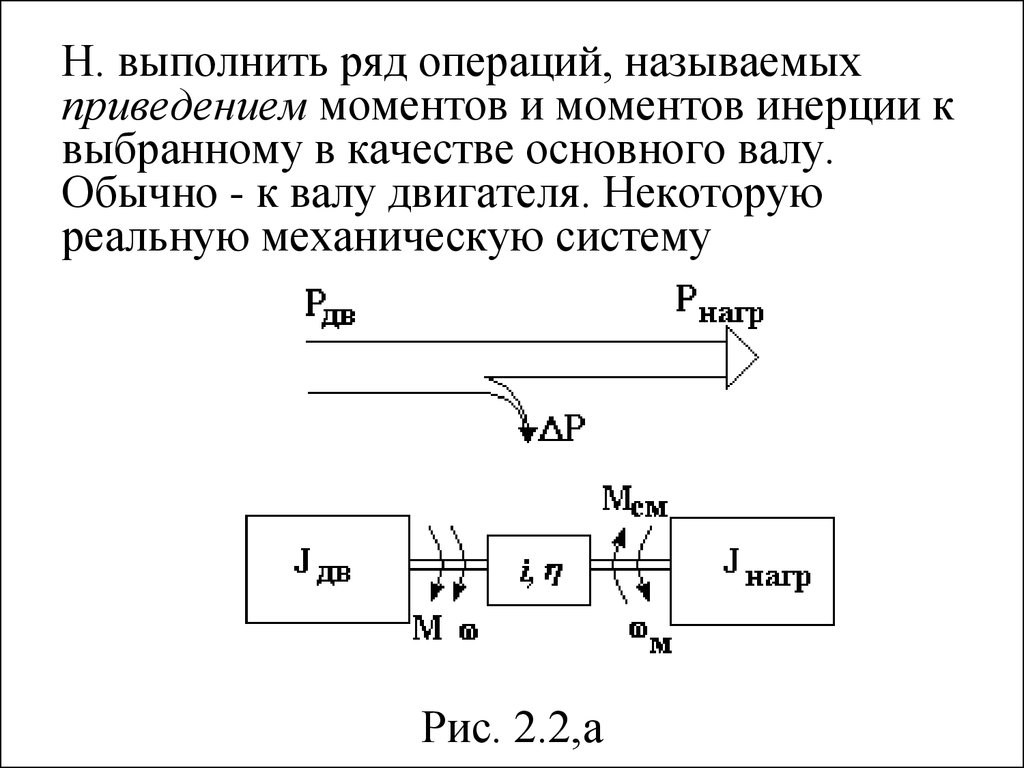
Н. выполнить ряд операций, называемыхприведением моментов и моментов инерции к
выбранному в качестве основного валу.
Обычно - к валу двигателя. Некоторую
реальную механическую систему
Рис. 2.2,а
11.
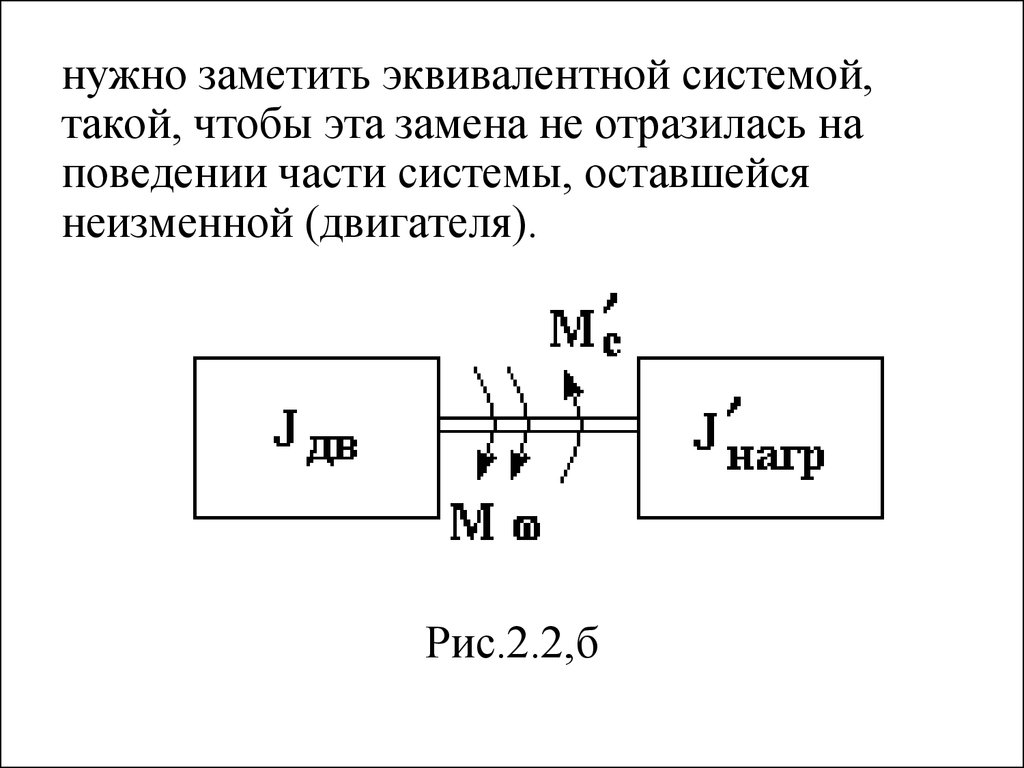
нужно заметить эквивалентной системой,такой, чтобы эта замена не отразилась на
поведении части системы, оставшейся
неизменной (двигателя).
Рис.2.2,б
12. Допустим: система жесткая, без зазоров; моменты инерции, относящиеся к основным валам, неизменны, относящиеся к промежуточным валам, равны
Допустим: система жесткая, без зазоров;моменты инерции, относящиеся к основным
валам, неизменны, относящиеся к
промежуточным валам, равны нулю;
отношение
i
M
и КПД передачи - постоянны.
13.
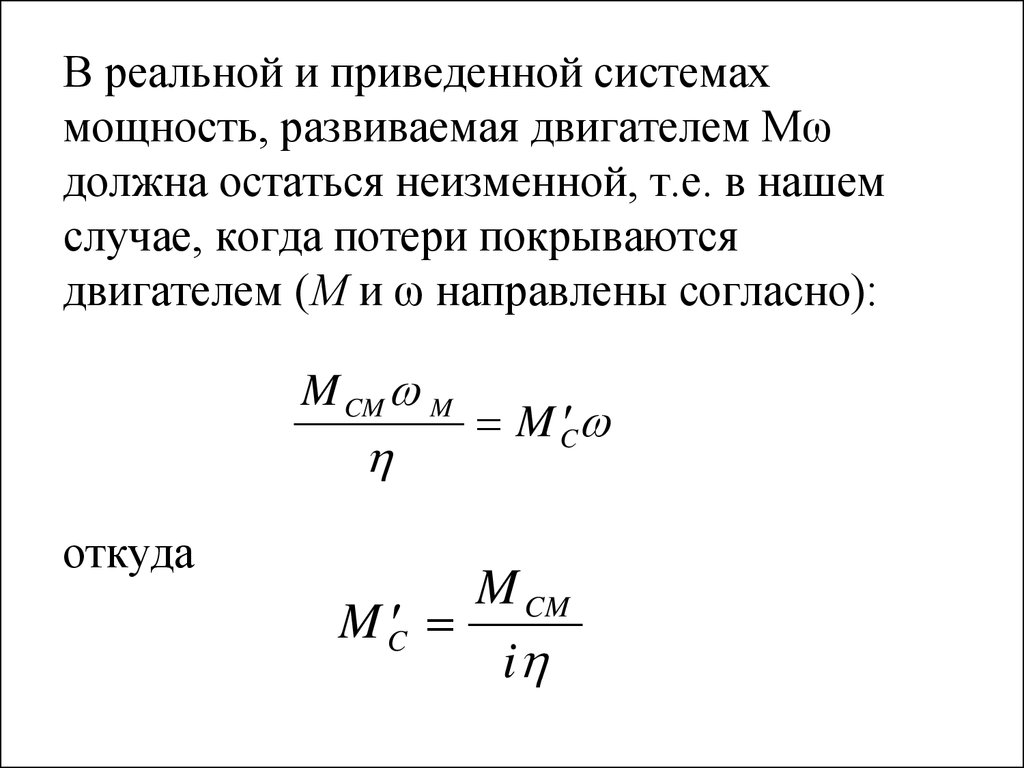
В реальной и приведенной системахмощность, развиваемая двигателем Мω
должна остаться неизменной, т.е. в нашем
случае, когда потери покрываются
двигателем (М и ω направлены согласно):
M CM M
откуда
M C
M CM
M C
i
14.
Потери покрываются частью системы,создающей движение, поэтому при обратном
потоке мощности - от нагрузки к двигателю
M CM
M C
,(2.2, а ).
i
В реальной и приведенной системах должны
быть одинаковы запасы кинетической
энергии, т.е.
2
J д в
2
2
J наг р M
2
J ' наг р
J д в
2
2
2
2
15.
илиJ ' наг р
J наг р
i
2
В целях упрощения мы не учли потери в
передачах; это обычно не приводит к
большим погрешностям, если динамические
режимы не играют определяющую роль в
работе привода.
16. 2.3. Механические характеристики
Моменты М и Мс могут зависеть от времени,от положения, от скорости.
Нас будет интересовать связь М и Мс с ω.
Зависимости ω(М) и ω(Мс) - механические
характеристики соответственно двигателя и
нагрузки (механизма).
М.Х. необходимы при анализе статических и
динамических режимов электропривода.
17.
Моменты и скорость могут иметь различныезнаки, м-е х-ки могут располагаться в 4-х
квадрантах плоскости . Рассмотрим
характеристики асинхронного двигателя (М)
и центробежной машины (Мс). Знаки величин
определяют, приняв одно из направлений
движения за положительное, например: по
часовой стрелке- + или вверх- + и т.п.
18.
Рис. 2.3. Пример механических характеристик19.
Моменты, направленные по движению(движущие), имеют знак, совпадающий со
знаком скорости (участок 0 - Мк.з
характеристики двигателя);
моменты, направленные против движения
(тормозящие), имеют знак,
противоположный знаку скорости
(остальные участки характеристик).
20. Моменты: активные и реактивные.
Активные моменты могут быть движущимии тормозящими.
Их направление не зависит от направления
движения: момент, созданный электрической
машиной (М на рис. 2.3), момент, созданный
грузом, пружиной и т.п.
Соответствующие механические
характеристики могут располагаться в любом
из четырех квадрантов.
21.
Реактивные моменты - реакция на движение.Всегда направлены против движения, т.е.
всегда тормозящие: момент от сил трения,
момент, создаваемый центробежной
машиной (Мс на рис. 2.3) и т.п.
Механические характеристики всегда
располагаются во втором и четвертом
квадрантах.
22. Жесткость механических характеристик
dMd
Рис. 2.4. Механические характеристики с
различной жесткостью β=∞(1)а.ж., β=0(2)а.м.,
β<0(3), β > 0(4)
23. Повторение
1. Основное уравнение движения2. Для чего необходимо приведение
моментов и моментов инерции? Какое
условие должно выполняться?
3. Что называется механической
характеристикой? В каких квадрантах
могут располагаться?
4. Что такое жесткость механической
характеристики?