

 Механика
Механика Электроника
ЭлектроникаПохожие презентации:






")



Уравнение движения электропривода и его анализ. Приведение моментов к оси вращения вала электродвигателя. Лекция 3
1.
СЕВАСТОПОЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТКафедра «ВОЗОБНОВЛЯЕМЫЕ ИСТОЧНИКИ ЭНЕРГИИ И
ЭЛЕКТРИЧЕСКИЕ СИСТЕМЫ И СЕТИ»
Дисциплина:
«Автоматизированный электрический привод»
Лекция № 3:
УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
И ЕГО АНАЛИЗ. ПРИВЕДЕНИЕ
МОМЕНТОВ К ОСИ ВРАЩЕНИЯ ВАЛА
ЭЛЕКТРОДВИГАТЕЛЯ
Доцент кафедры к. т. н.
ГОРПИНЧЕНКО Александр Владимирович
2.
ВОПРОСЫ1. Уравнение движения электропривода и его анализ.
2. Приведение статических моментов к валу
электродвигателя.
3. Приведение моментов инерции к валу
электродвигателя.
ЛИТЕРАТУРА
М.Г.Чиликин, А.С.Сандлер
«Общий курс электропривода», стр. 29…31, 38...40.
1
3.
2Правильный выбор двигателя возможен лишь на основе учета
динамических свойств ЭП.
Динамические свойства ЭП определяют его работу в переходных
режимах, т.е. при переходе от одного установившегося режима работы к
другому.
Динамические свойства ЭП зависят от габаритов ЭД и ИМ, вида
передаточного звена, электрических параметров двигателя, схемы его
включения и ряда других показателей.
Исследование характера движения ЭП в переходных режимах
производится на основе решения уравнения движения.
Уравнение движения связывает моменты, действующие в системе
ЭП, с изменением скорости вращения.
В большинстве случаев, вращающий момент создается ЭД, а со
стороны ИМ действует полезный момент сопротивления.
Полезный момент нагрузки и момент сил трения образуют
статический момент сопротивления.
Мс = Мпол+ М0
(1)
4.
3В установившемся режиме, характеризующийся постоянством
скорости электромеханической системы Ω=const, вращающий момент
уравновешивается моментом Мc , а их разность равна нулю.
М – Мс= 0
(2)
При этом запас кинетической энергии всех вращающихся частей
системы также постоянный.
Переходный режим, сопровождающийся изменением скорости Ω,
имеет место при неравенстве моментов М >< Мс. При этом избыточный
момент уравновешивается динамическим или инерционным моментом.
М – Мс = Мизб = J dΩ
(3)
dt
М – момент, создаваемый двигателем, [Нм] ;
Мс – статический момент сопротивления, [Нм]
J = mρ2 – момент инерции привода, [кг м2] ;
ρ – радиус инерции, [м].
Ω – угловая скорость вращения ЭД, [1/c] ;
t – время, [c] .
Динамический момент возникает при всяком изменении скорости
системы и характеризует изменение запаса её кинетической энергии.
5.
4Момент инерции может быть выражен так:
2
G
D
J = m ∙ ρ2 =
∙
,
g
4
(4)
где: G – вес, [Н];
g = 9,81 – ускорение свободного падения, [м/с2];
D – диаметр, [м].
Величина GD2 [Н∙м2] называется маховым моментом. Если
выразить J через GD2, а Ω через частоту вращения n [об/мин], n
30
то получим удобное для практических расчетов выражение
GD 2 dn
M – Mс =
375 dt
(5)
Значения маховых моментов GD2 обычно приводятся в каталогах
для ЭД.
6.
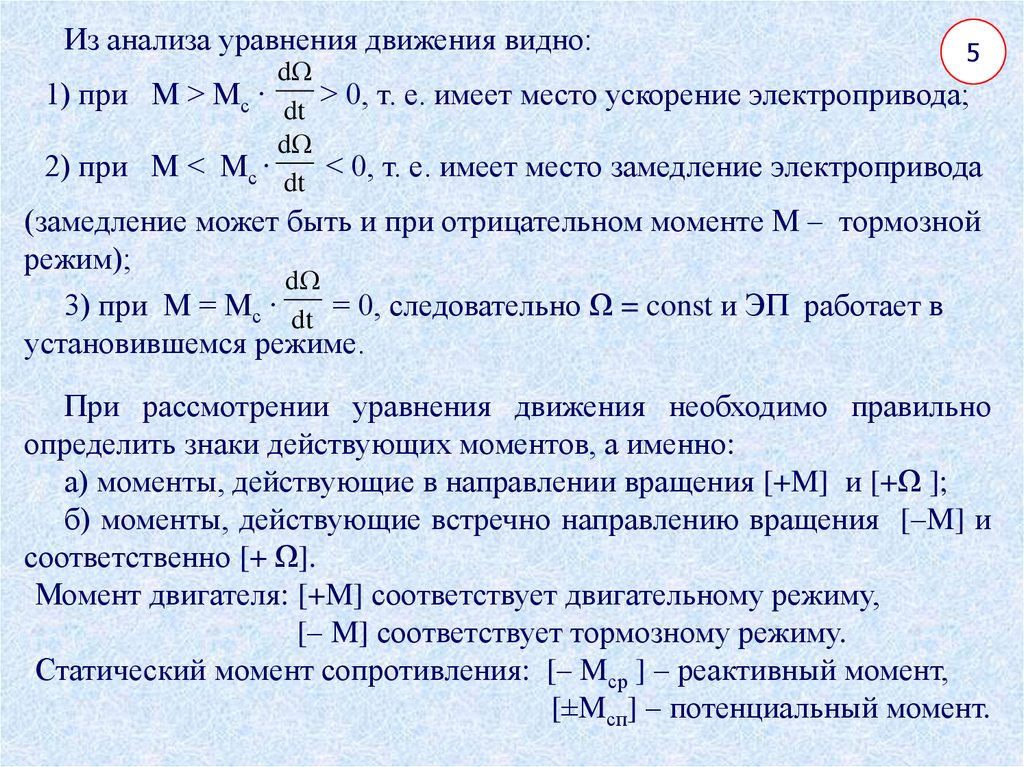
Из анализа уравнения движения видно:5
dΩ
1) при М > Мс ∙ dt > 0, т. е. имеет место ускорение электропривода;
dΩ
2) при М < Мс ∙ dt < 0, т. е. имеет место замедление электропривода
(замедление может быть и при отрицательном моменте М – тормозной
режим);
dΩ
3) при М = Мс ∙ dt = 0, следовательно Ω = const и ЭП работает в
установившемся режиме.
При рассмотрении уравнения движения необходимо правильно
определить знаки действующих моментов, а именно:
а) моменты, действующие в направлении вращения [+M] и [+Ω ];
б) моменты, действующие встречно направлению вращения [–M] и
соответственно [+ Ω].
Момент двигателя: [+M] соответствует двигательному режиму,
[– M] соответствует тормозному режиму.
Статический момент сопротивления: [– Mср ] – реактивный момент,
[±Mсп] – потенциальный момент.
7.
Учитывая возможные значения знаков моментов, уравнениедвижения в общем виде может быть записано
±M Mс = J
dΩ
dt
.
6
(6)
Примеры анализа уравнения движения.
Исходное положение – неподвижное состояние системы Ω=0
dΩ
При условии: а) М – Мс = J
> 0, Ω возрастёт, что
dt
соответствует разгону при подъёме груза (рис. 1а);
б) М – Мс = 0 , Ω = const соответствует
установившемуся режиму двигателя при подъёме груза (рис.1а);
dΩ
в) М – Мс = J < 0 , Ω снижается, что
dt
соответствует торможению при подъёме груза (рис. 1а).
8.
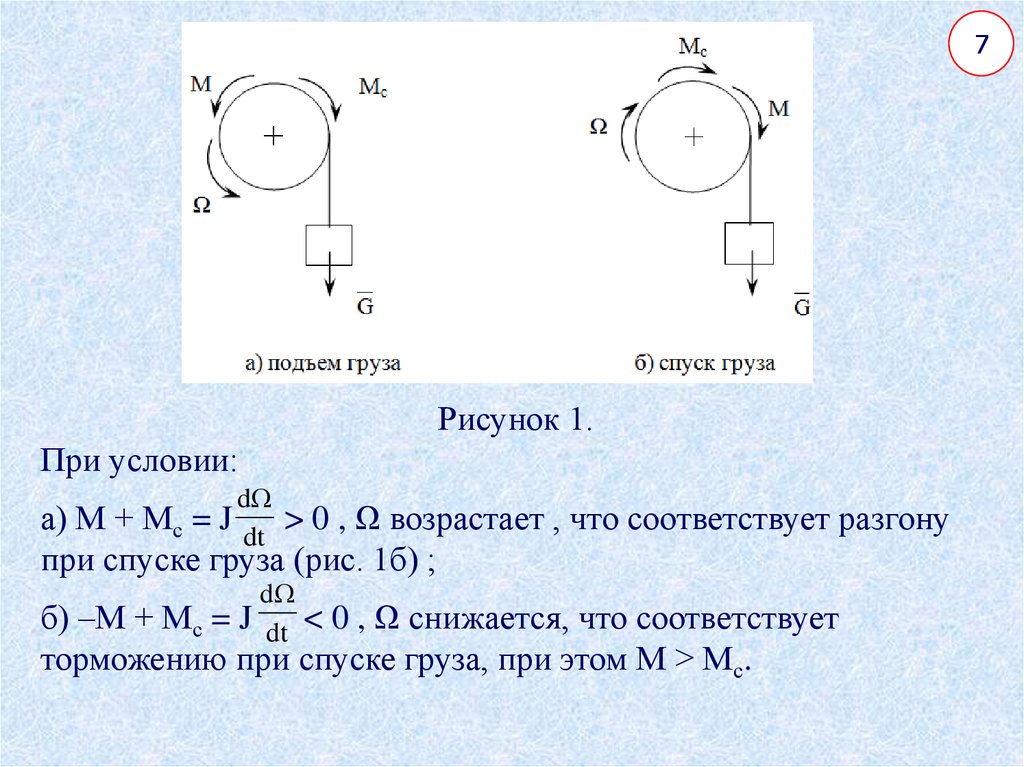
7Рисунок 1.
При условии:
dΩ
J dt
а) М + Мс =
> 0 , Ω возрастает , что соответствует разгону
при спуске груза (рис. 1б) ;
dΩ
J dt
б) –М + Мс =
< 0 , Ω снижается, что соответствует
торможению при спуске груза, при этом М > Мс.
9.
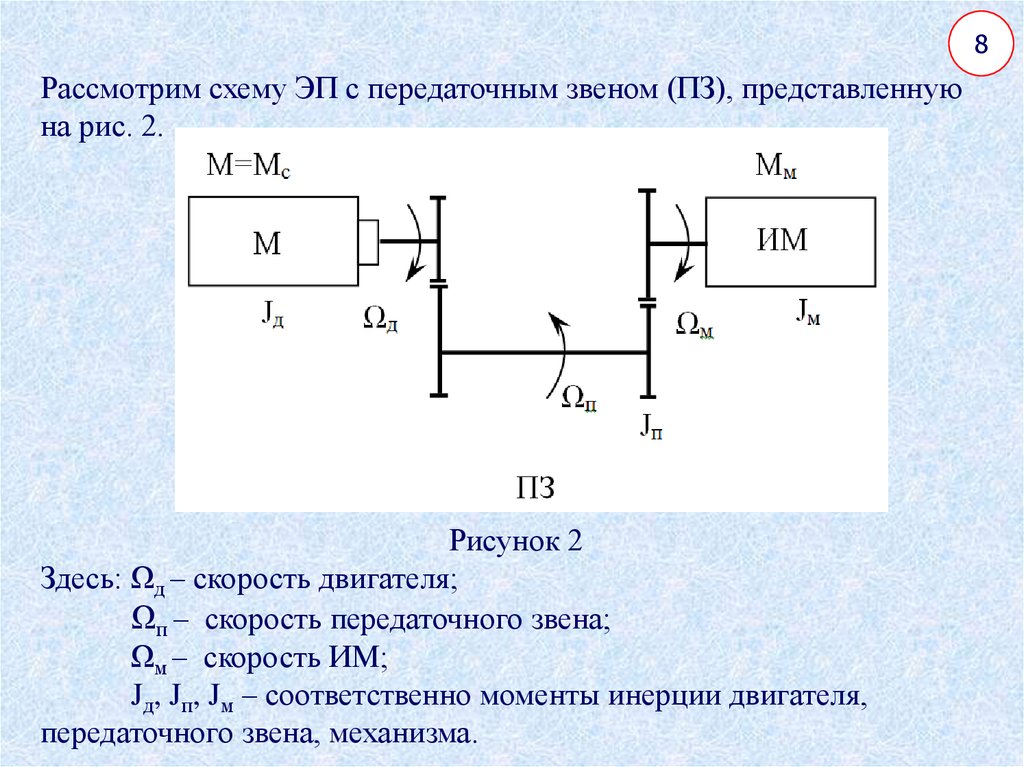
8Рассмотрим схему ЭП с передаточным звеном (ПЗ), представленную
на рис. 2.
Рисунок 2
Здесь: Ωд – скорость двигателя;
Ωп – скорость передаточного звена;
Ωм – скорость ИМ;
Jд, Jп, Jм – соответственно моменты инерции двигателя,
передаточного звена, механизма.
10.
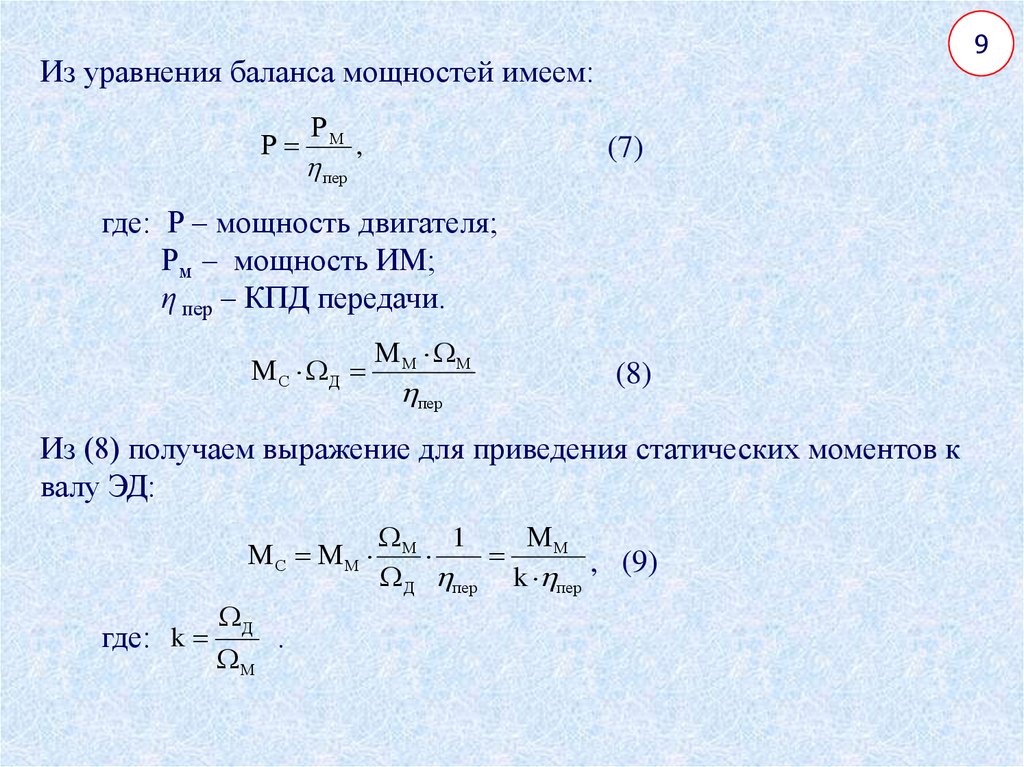
9Из уравнения баланса мощностей имеем:
Р
РМ
пер
,
(7)
где: Р – мощность двигателя;
Рм – мощность ИМ;
η пер – КПД передачи.
МС Д
М М М
пер
(8)
Из (8) получаем выражение для приведения статических моментов к
валу ЭД:
МС М М
где: k
Д
М
.
М 1
ММ
, (9)
Д пер k пер
11.
10В общем случае передаточное звено может иметь сложную
структуру и передаточное число k = k1∙ k2∙ k3∙…∙ kn,
где ki – передаточное число единичной пары или единичного
звена.
Аналогично: ηпер = η1 ∙ η2 ∙ η3 ∙... ∙ηn, где ηi – К.П.Д. единичной
пары.
Тогда окончательное выражение для приведения к валу ЭД
статических моментов запишется:
ММ
М МС
k1 k 2 ... k n 1 2 ... n
(10)
12.
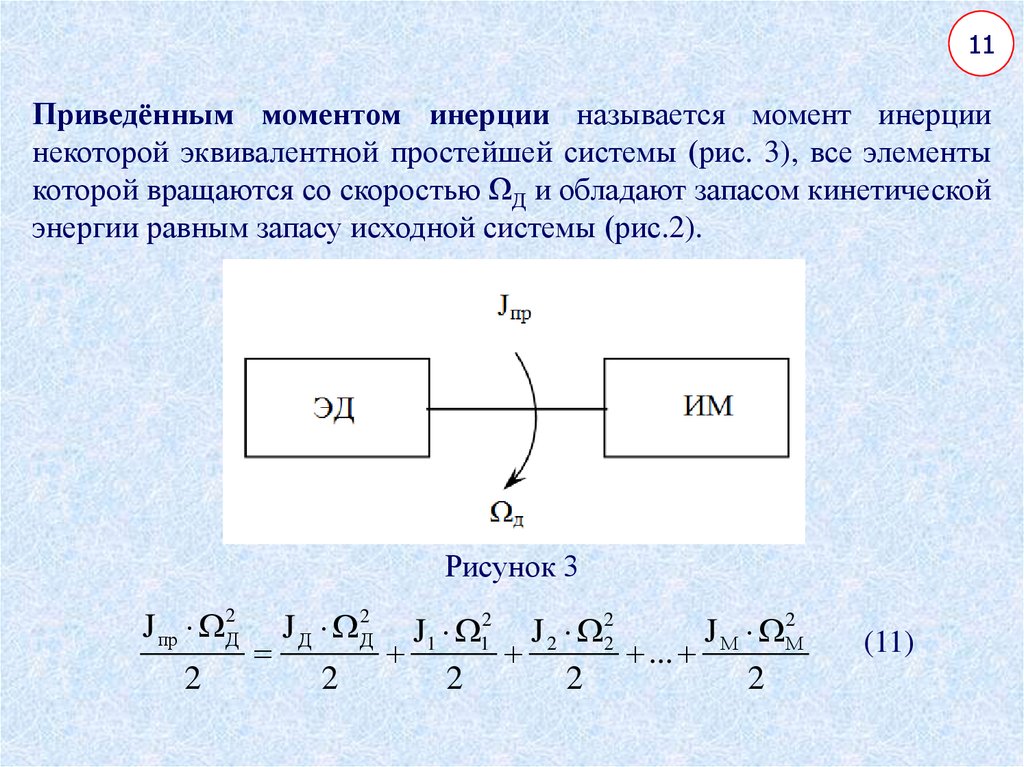
11Приведённым моментом инерции называется момент инерции
некоторой эквивалентной простейшей системы (рис. 3), все элементы
которой вращаются со скоростью ΩД и обладают запасом кинетической
энергии равным запасу исходной системы (рис.2).
Рисунок 3
J пр 2Д
2
J Д 2Д
2
J1 12 J 2 22
J М 2М
...
2
2
2
(11)
13.
12Две системы – простейшая (рис. 3) и исходная (рис. 2) во всех
динамических режимах будут абсолютно идентичны, однако,
простейшая система удобнее для анализа. Найдём выражение
для приведённого момента из выражения (11).
2
J пр
Здесь
2
1
2
М
J2
... J М
J Д J1
Д
Д
Д
2
2
1
,
Д 1 k 1 k1 k 2
2
(12)
1
k 2.
2
2
1
1
1
... J М
Тогда J пр J Д J1 J 2
k1
k1 k 2 ... k n
k1 k 2
2
КПД обычно при определении Jпр не учитывают..
2