





 Информатика
ИнформатикаПохожие презентации:









")
Искусственный интеллект. Информированный поиск
1.
Искусственный интеллектИнформированный поиск
2.
Сегодня1) Информированный поиск
–Эвристики
–Жадный
–А*
поиск
поиск
2) Поиск на графе
3.
ПоискПроблема поиска:
Пространство состояний (все
возможные состояния среды)
Действия
Функция следования
(действия, стоимость)
Проверка на цель
Дерево поиска
Узлы: содержат планы для
4.
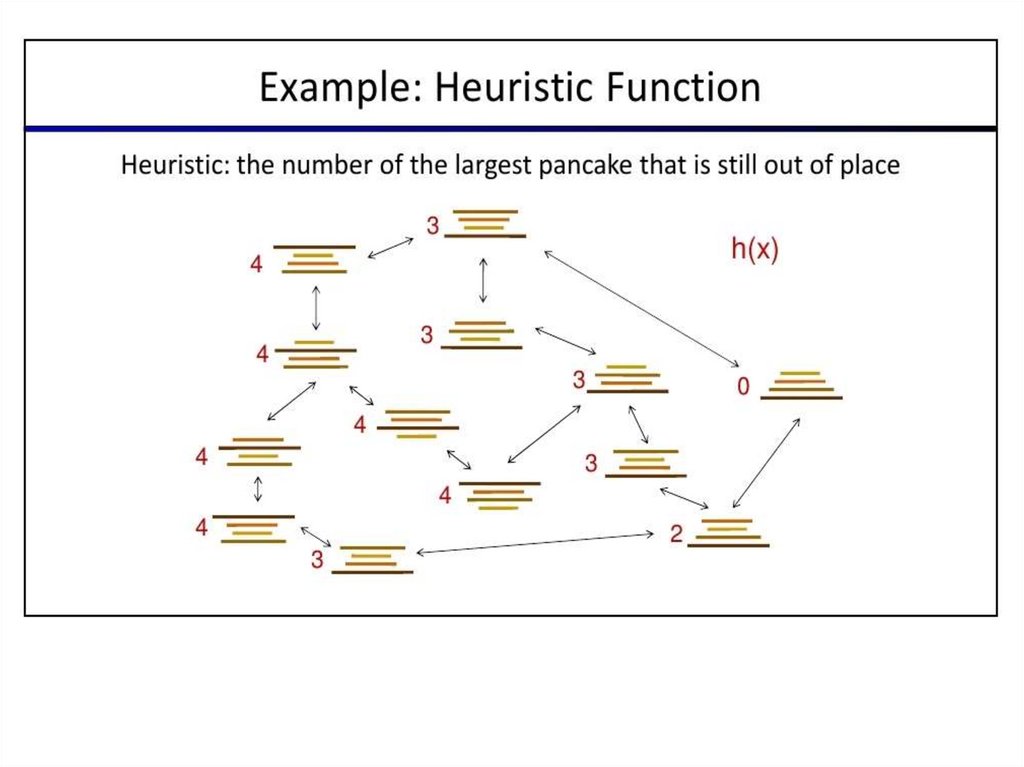
Блинная сортировкаСтоимость: количество перевернутых блинов
5.
6.
Блинная сортировкаГраф пространства состояний со стоимостями
7.
Общий вид алгоритма поиска1)function Tree-Search(problem, strategy) returns
решение или неудача
2) инициализация поиска в дереве: создание
структуры данных, получение начального
состояния из problem
3) loop do
4)
if нет узлов в периферии then return неудача
5)
выбрать следующий узел из периферии в
соответствии со strategy
6)
if узел содержит цель then return решение
8.
ОчередиВсе эти алгоритмы поиска
отличаются только стратегией
изъятия узлов из периферии
Все стратегии можно
реализовать с помощью
очереди с приоритетом
На практике, для DFS и BFS
используются очереди и стеки
Можно использовать одну
реализацию, которая
использует разные структуры
9.
Поиск по критерию стоимости(Uniform Cost Search)
10.
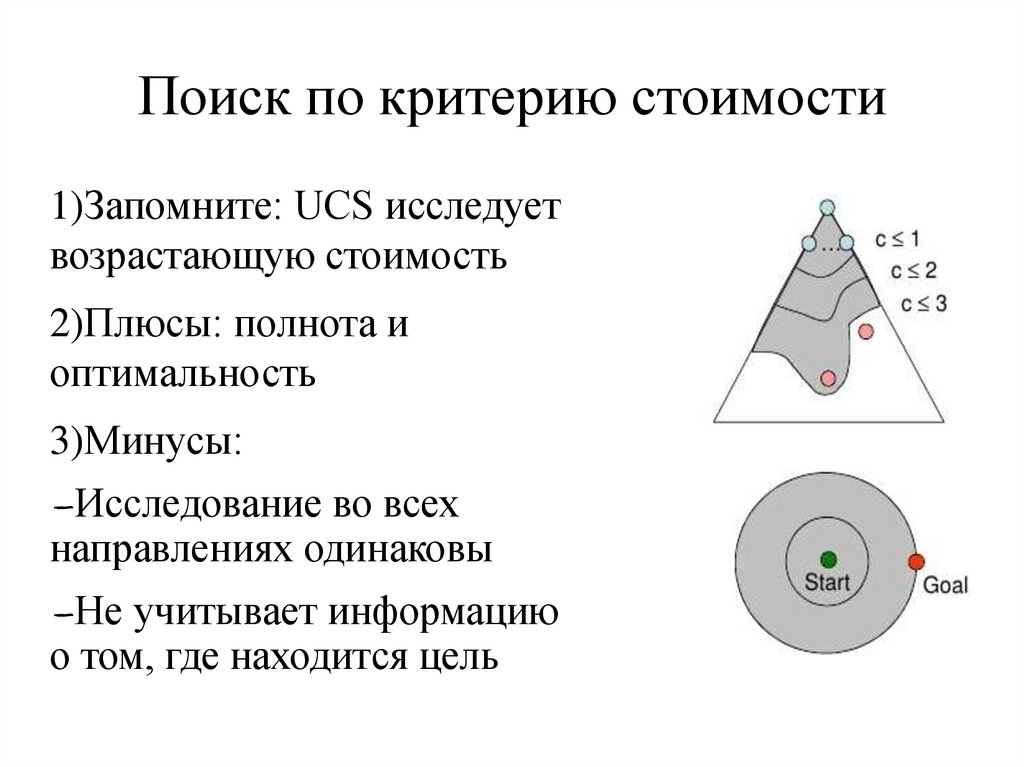
Поиск по критерию стоимости1)Запомните: UCS исследует
возрастающую стоимость
2)Плюсы: полнота и
оптимальность
3)Минусы:
–Исследование
во всех
направлениях одинаковы
–Не
учитывает информацию
о том, где находится цель
11.
Информированный поиск(Informed Search)
12.
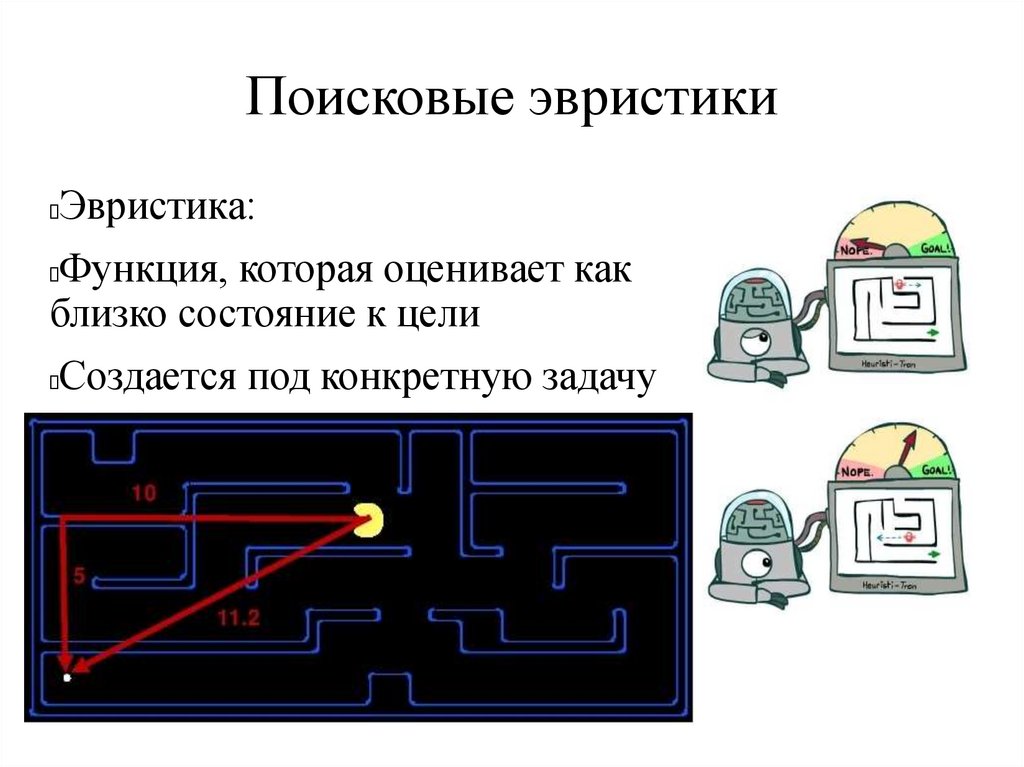
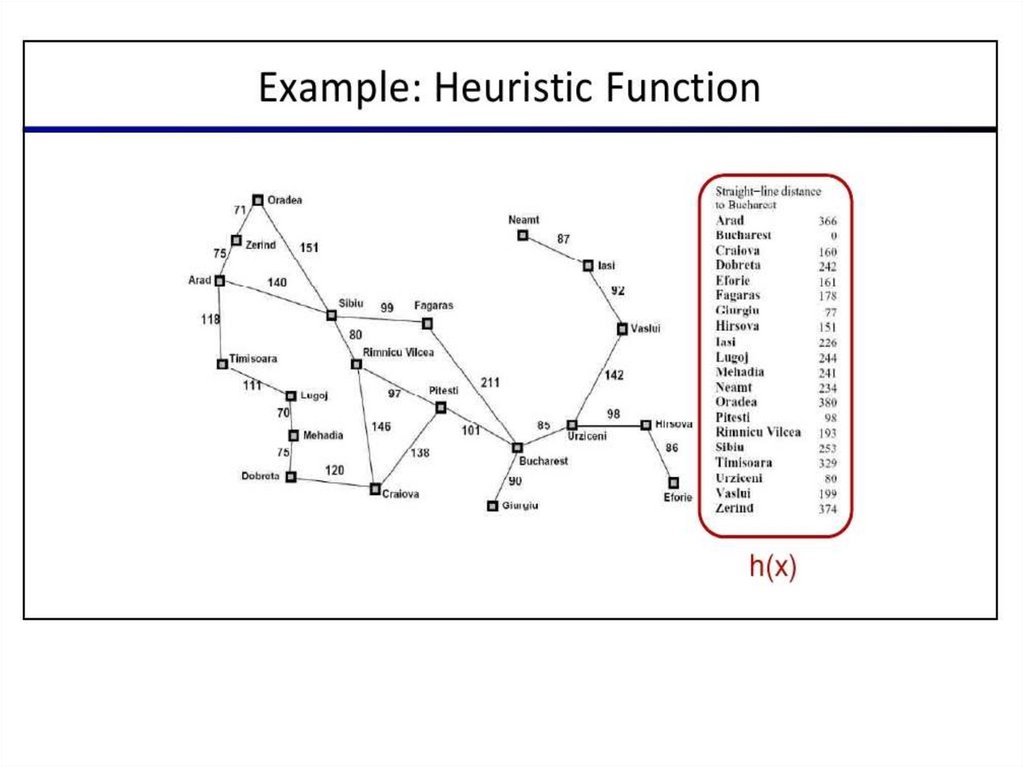
Поисковые эвристикиЭвристика:
Функция, которая оценивает как
близко состояние к цели
Создается под конкретную задачу
Примеры: манхеттенское
расстояние, евклидово расстояние
для пути
13.
14.
15.
Жадный поиск(Greedy Search)
16.
17.
18.
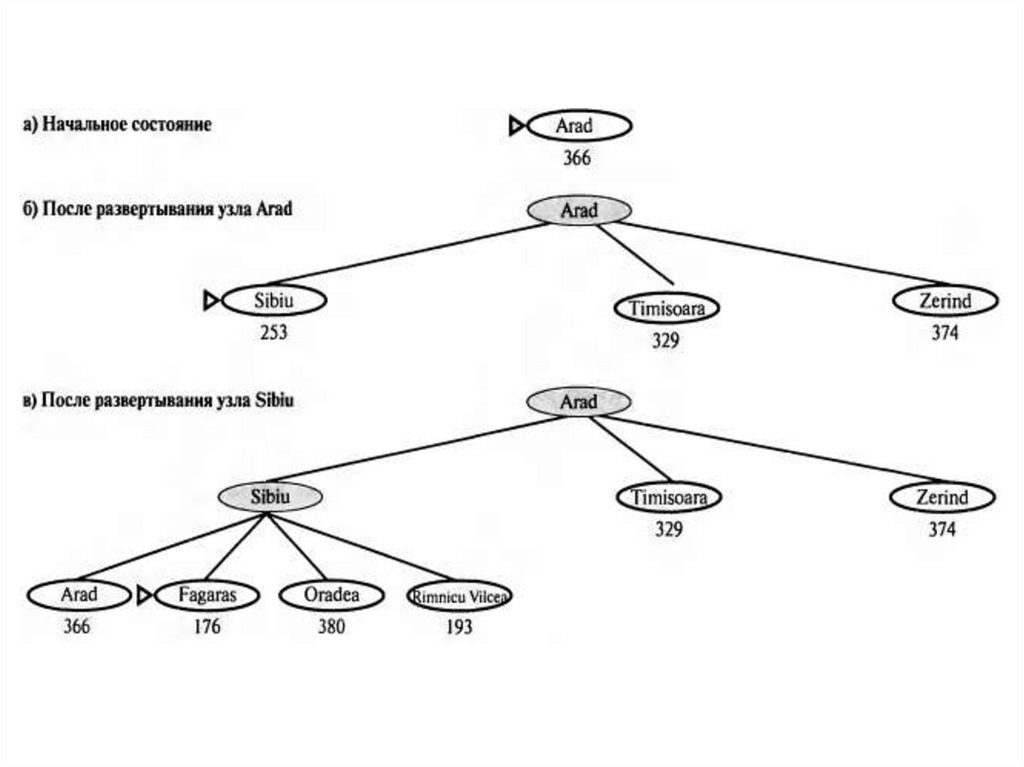
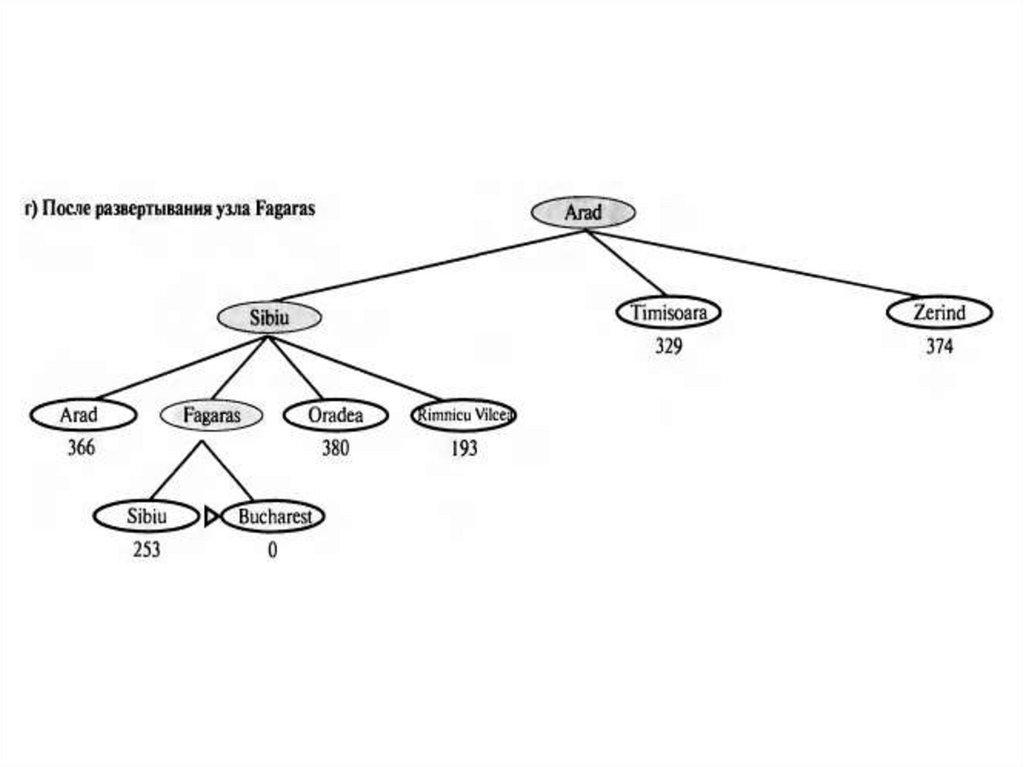
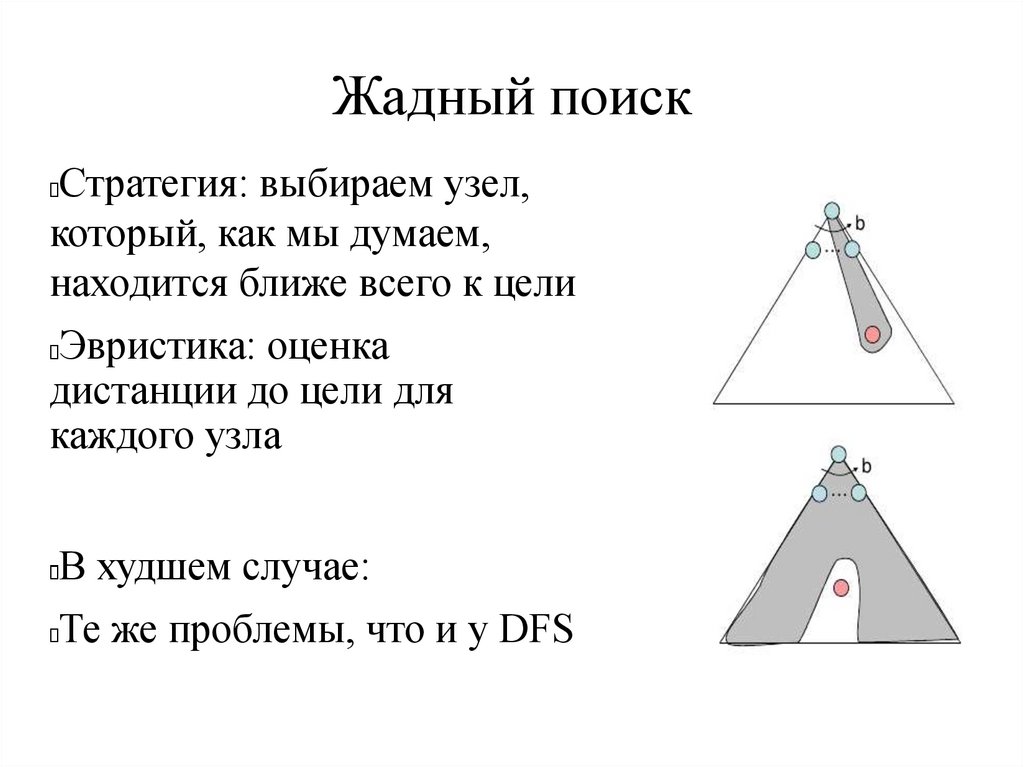
Жадный поискСтратегия: выбираем узел,
который, как мы думаем,
находится ближе всего к цели
Эвристика: оценка
дистанции до цели для
каждого узла
В худшем случае:
Те же проблемы, что и у DFS
19.
Поиск А*(A* Search)
20.
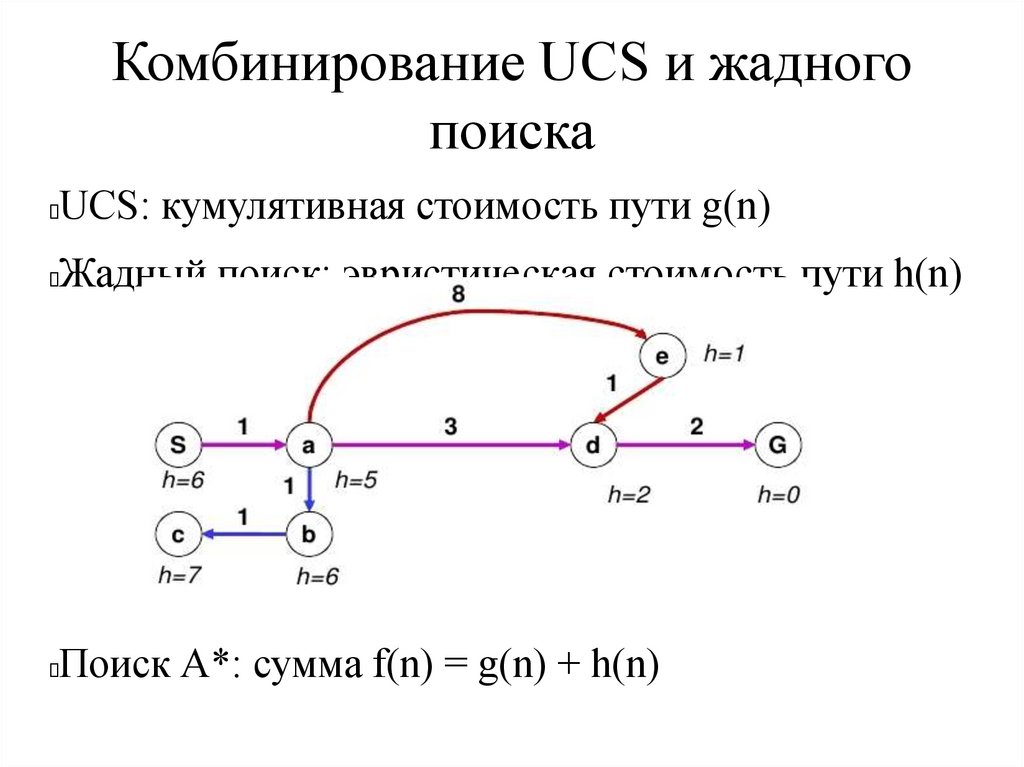
Комбинирование UCS и жадногопоиска
UCS: кумулятивная стоимость пути g(n)
Жадный поиск: эвристическая стоимость пути h(n)
Поиск А*: сумма f(n) = g(n) + h(n)
21.
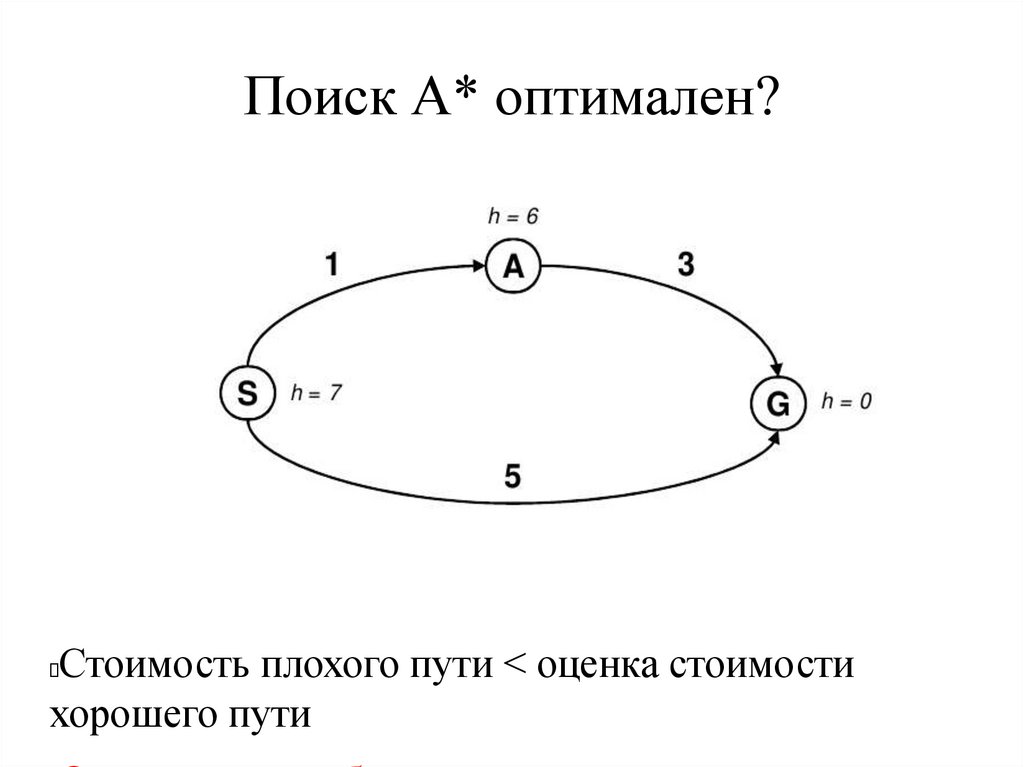
Поиск А* оптимален?Стоимость плохого пути < оценка стоимости
хорошего пути
22.
Допустимость эвристикНедопустимая эвристика
задерживает хорошие
планы в периферии
Допустимая эвристика
задерживает плохие
планы, но никогда не
превышает реальную
23.
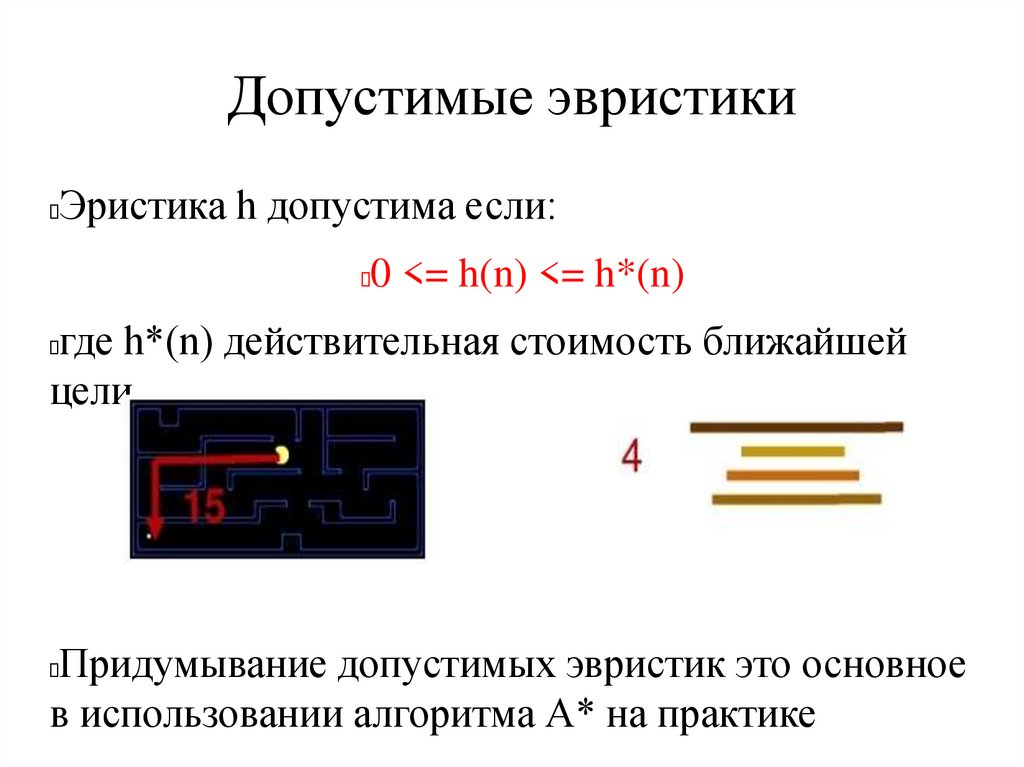
Допустимые эвристикиЭристика h допустима если:
0 <= h(n) <= h*(n)
где h*(n) действительная стоимость ближайшей
цели
Придумывание допустимых эвристик это основное
в использовании алгоритма А* на практике
24.
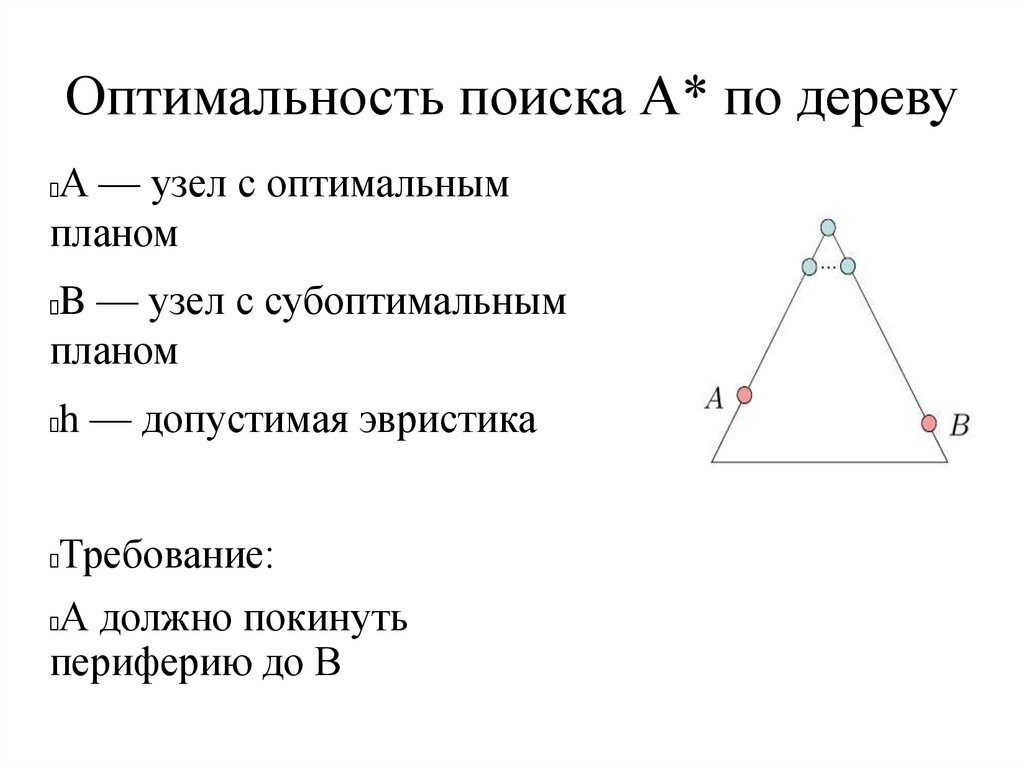
Оптимальность поиска А* по деревуА — узел с оптимальным
планом
B — узел с субоптимальным
планом
h — допустимая эвристика
Требование:
А должно покинуть
периферию до В
25.
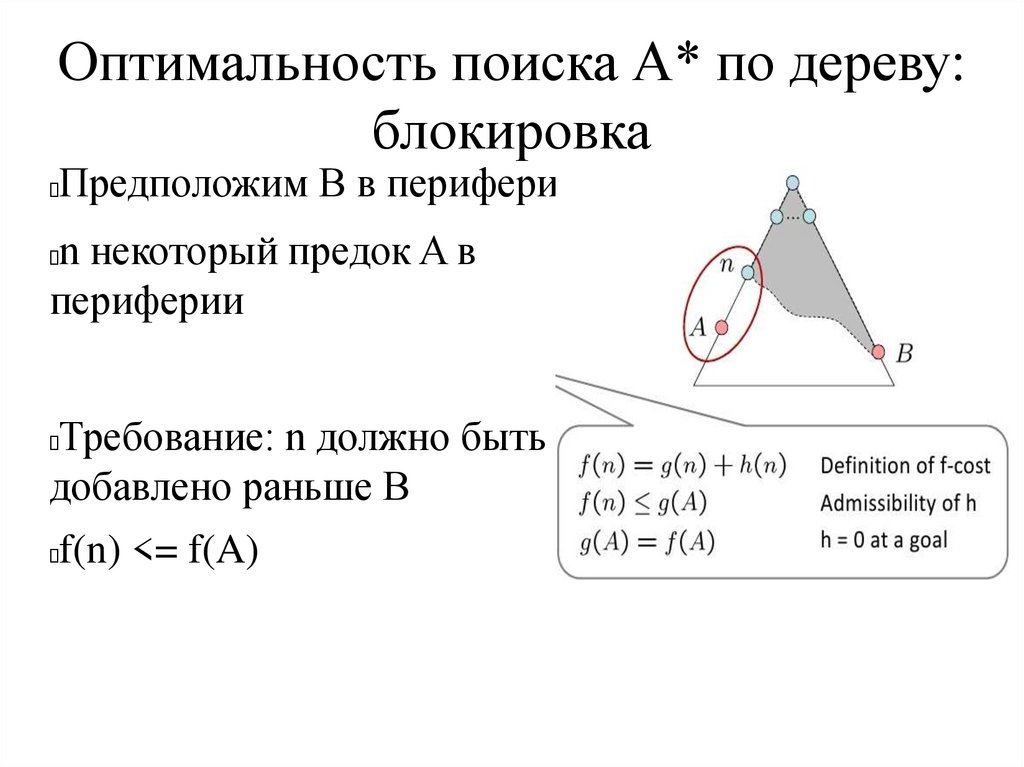
Оптимальность поиска А* по дереву:блокировка
Предположим В в периферии
n некоторый предок A в
периферии
Требование: n должно быть
добавлено раньше B
f(n) <= f(A)
26.
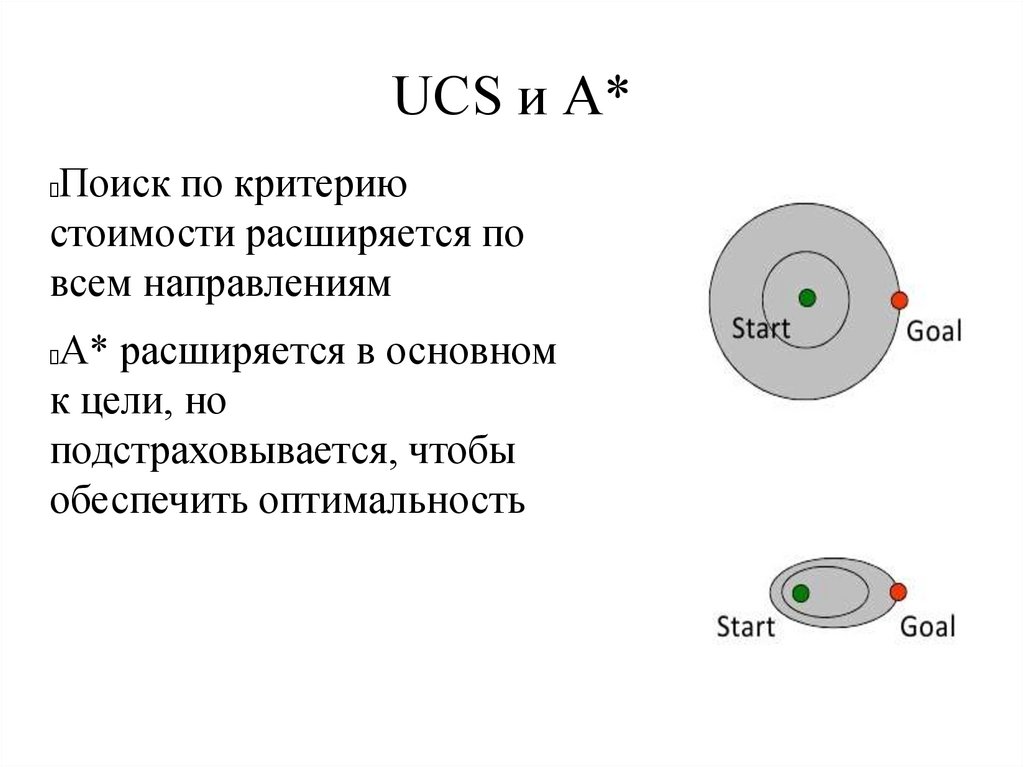
UCS и А*Поиск по критерию
стоимости расширяется по
всем направлениям
A* расширяется в основном
к цели, но
подстраховывается, чтобы
обеспечить оптимальность