



 Физика
ФизикаПохожие презентации:









")
Механическое движение. Механическое взаимодействие
1.
2.
Механическое движение – один из видов движения материи,выражающееся в изменении с течением времени взаимных
положений тел или их частей.
Механическое взаимодействие – один из видов
взаимодействия материи, вызывающий изменение механического
движения тел или их частей, а также препятствующий изменению
их взаимных положений.
Теоретическая механика – изучает законы механического
движения и механического взаимодействия, общие для любых тел.
Материальная точка (МТ) – не имеет размеров, но в отличие
от геометрической точки обладает массой, равной массе того тела,
которое изображается данной материальной точкой.
Движение точки по отношению к избранной системе
отсчета считается заданным, если известен способ, при помощи
которого можно определить положение точки в любой
момент времени.
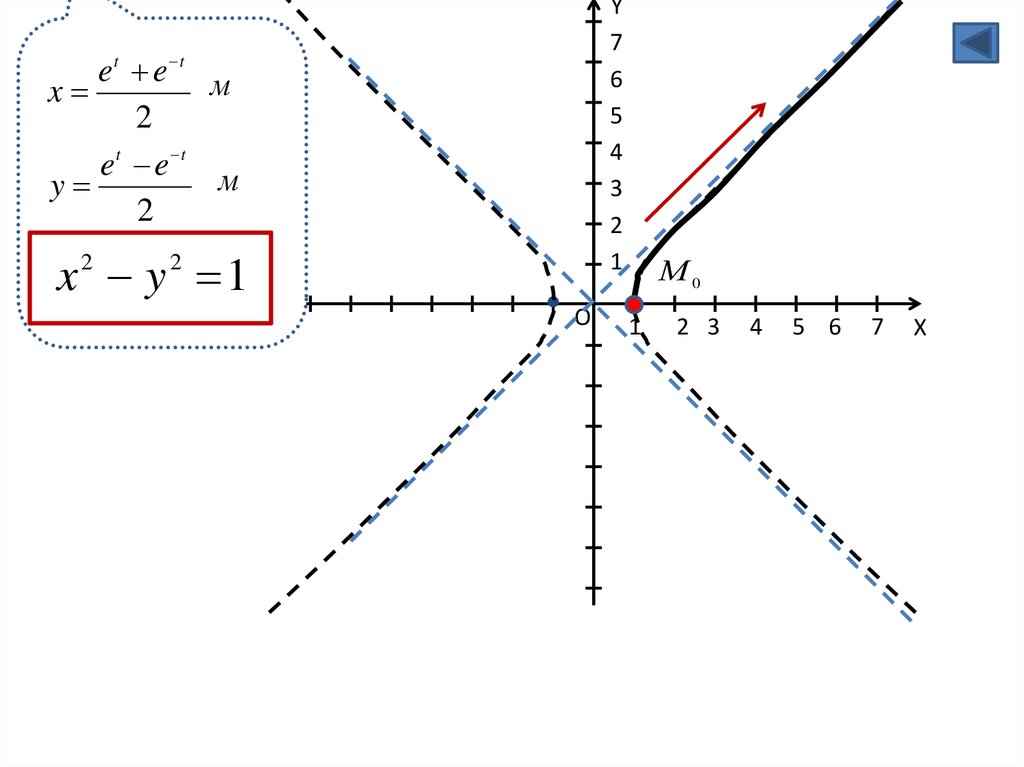
Точка, двигаясь в пространстве, описывает кривую,
называемую траекторией.
3.
Кинематика – раздел механики, в котором изучаютдвижение материальных тел без учета причин, его
вызывающих
Виды движения:
– Поступательное
– Вращательное
– Плоскопараллельное
– Сферическое
– Сложное
Кинематические
характеристики:
– Положение точки
(тела)
– Траектория
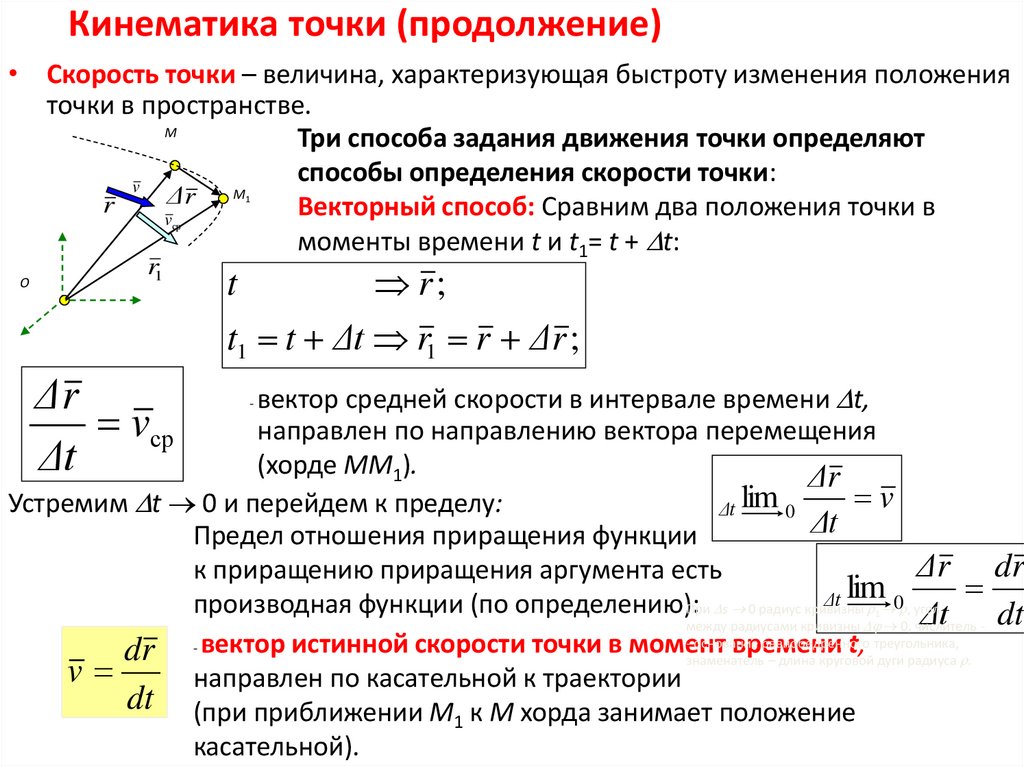
– Скорость
– Ускорение
Основные задачи
кинематики:
– Установление
математических способов
задания движения точек
(тел)
– Зная закон движения
точки (тела), установить
методы определения всех
величин,
характеризующих данное
движение
4.
Способы задания движенияВекторный способ задания
движения
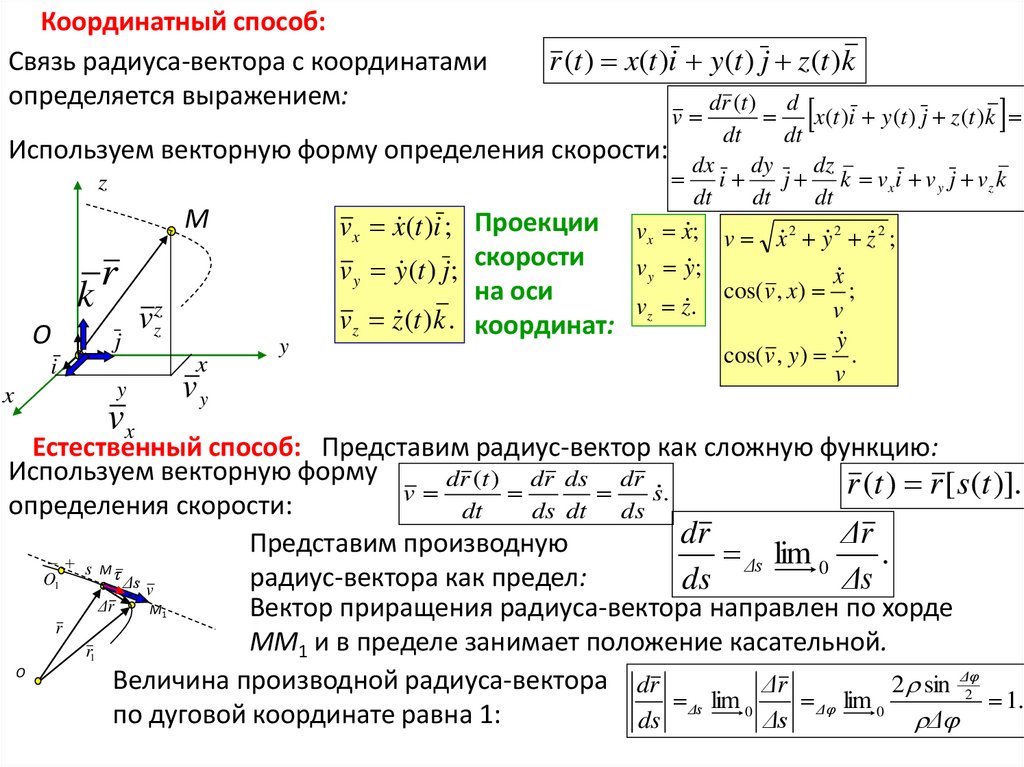
Координатный способ задания
движения
r r t
x x t
y y t
z z t
5.
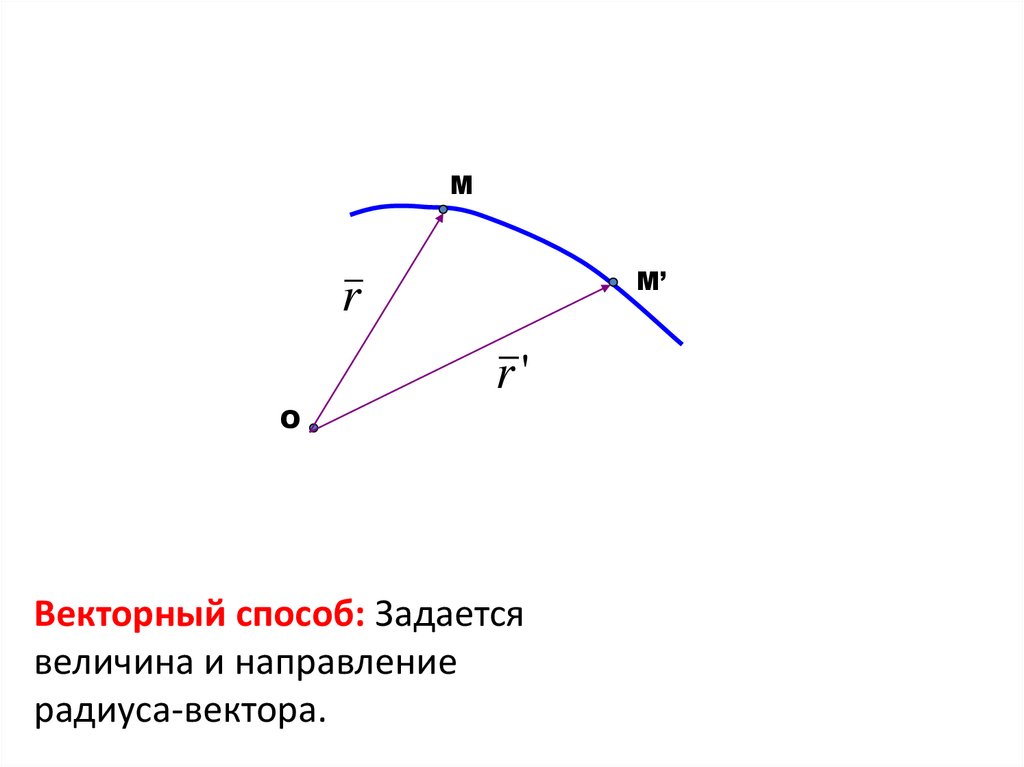
ММ’
r
r'
O
Векторный способ: Задается
величина и направление
радиуса-вектора.
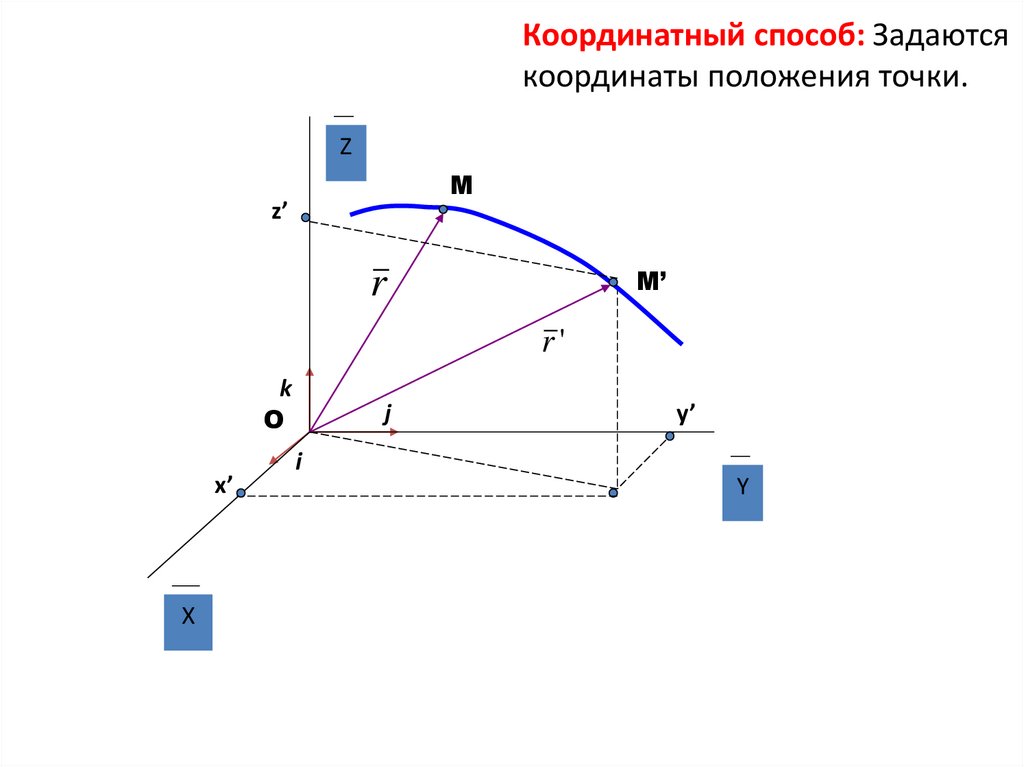
6.
Координатный способ: Задаютсякоординаты положения точки.
Z
М
z’
М’
r
r'
k
O
x’
X
j
i
y’
Y
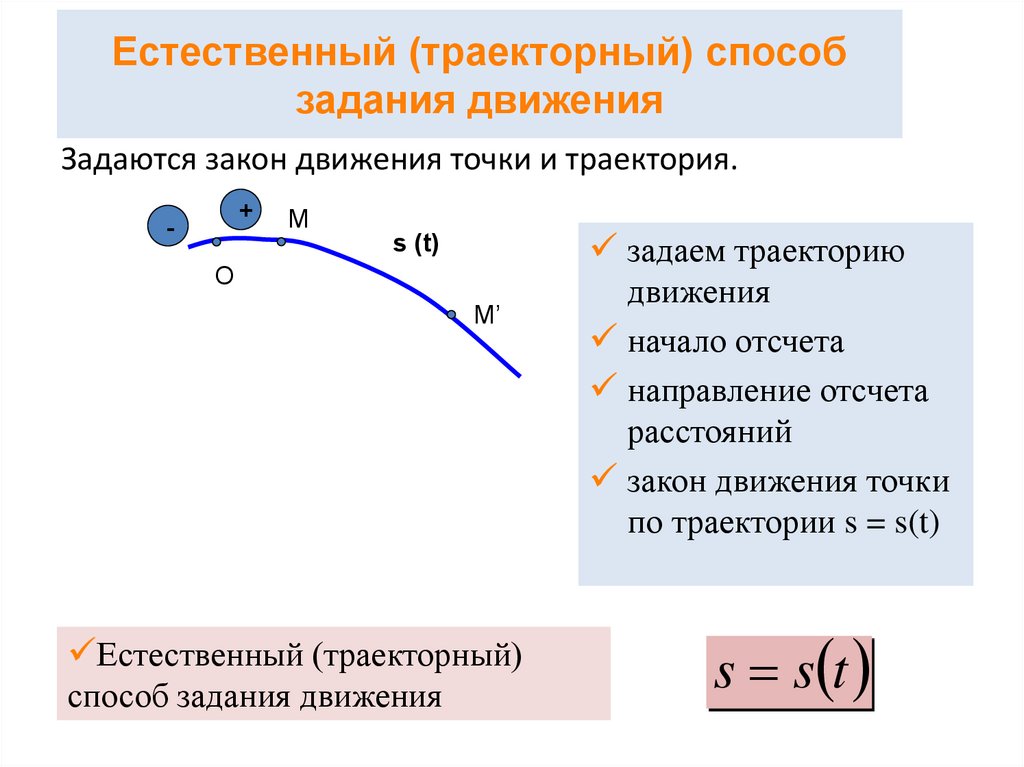
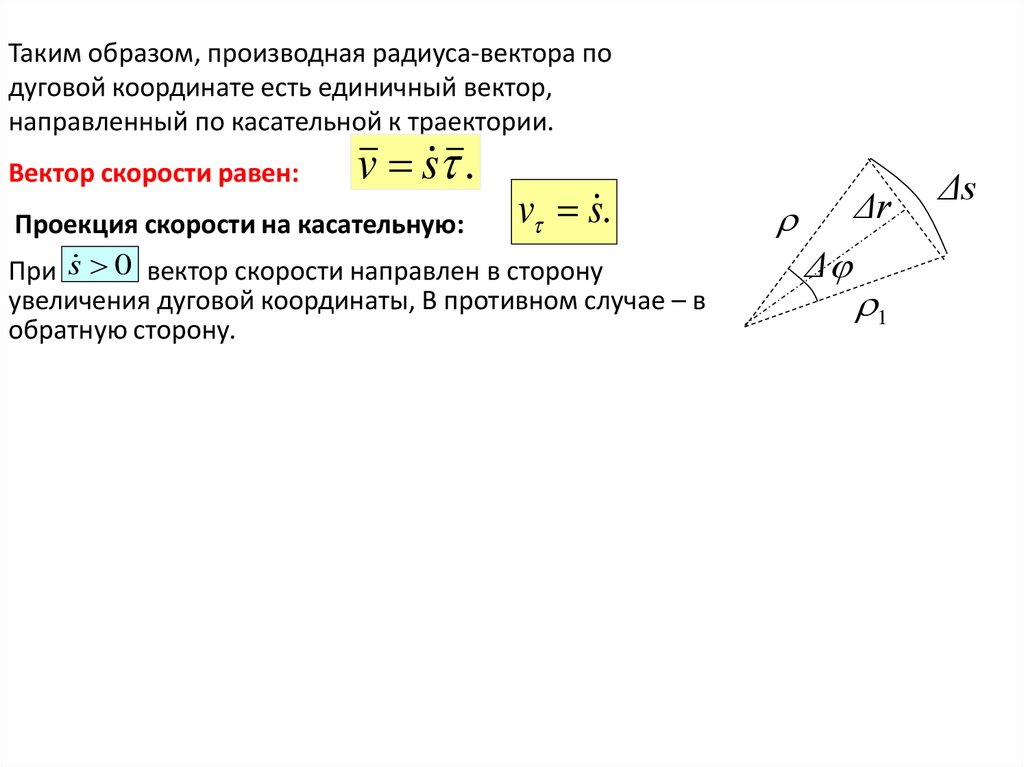
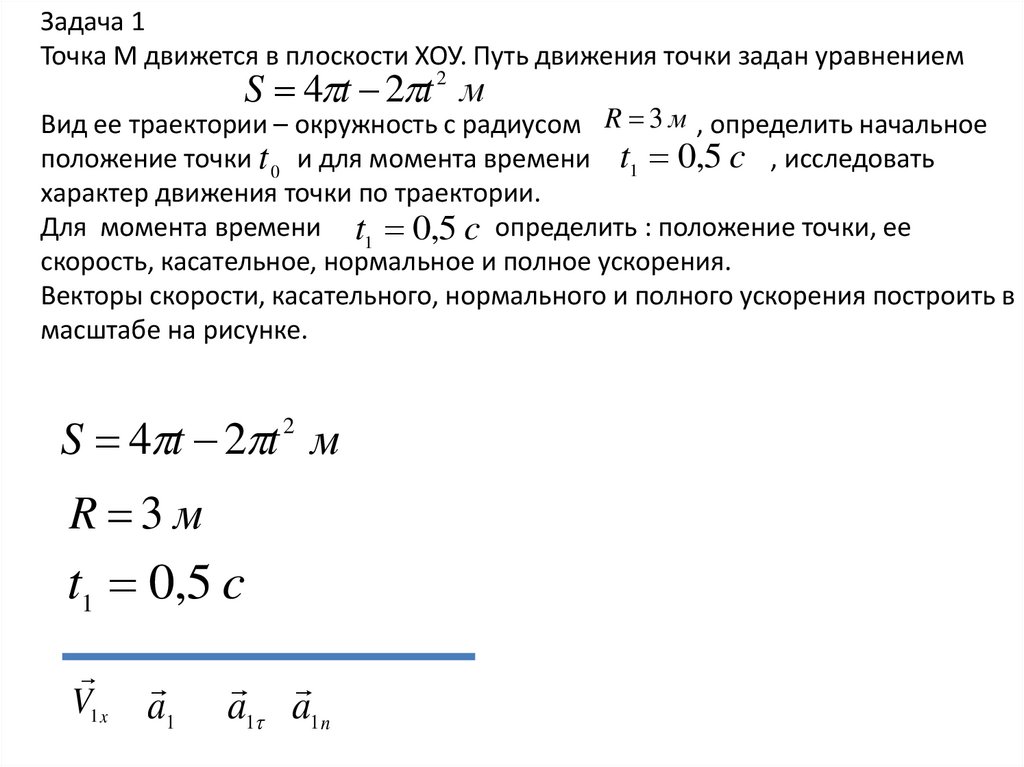
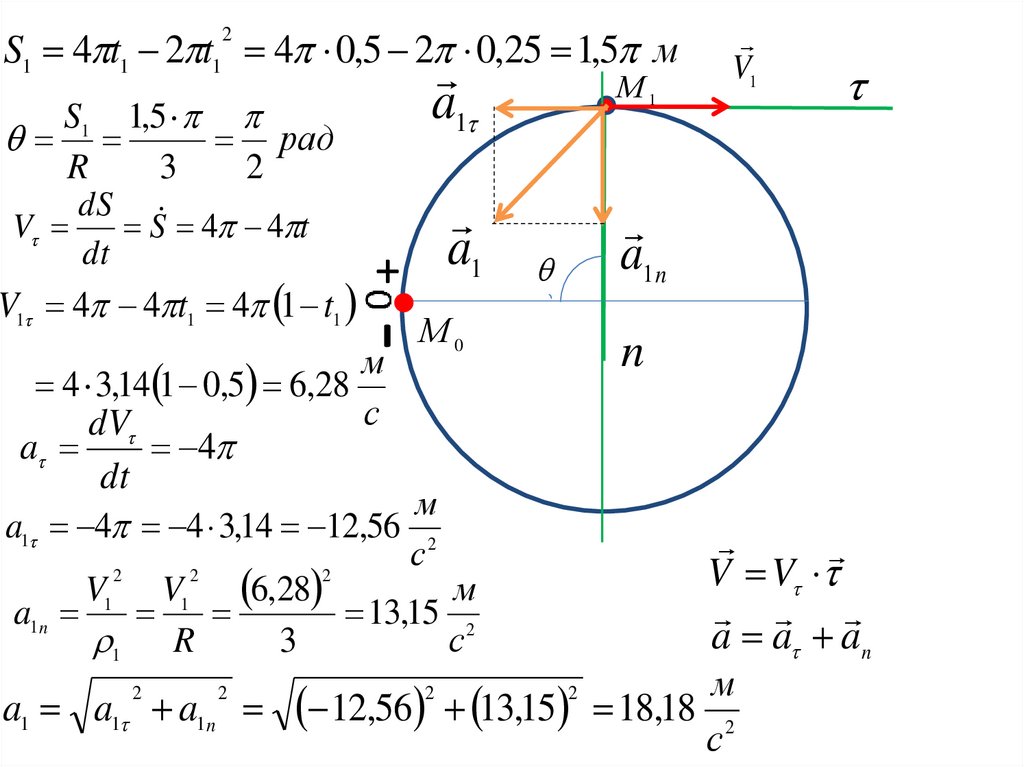
7.
Естественный (траекторный) способзадания движения
Задаются закон движения точки и траектория.
+
-
М
задаем траекторию
s (t)
O
М’
Естественный (траекторный)
способ задания движения
движения
начало отсчета
направление отсчета
расстояний
закон движения точки
по траектории s = s(t)
s s t
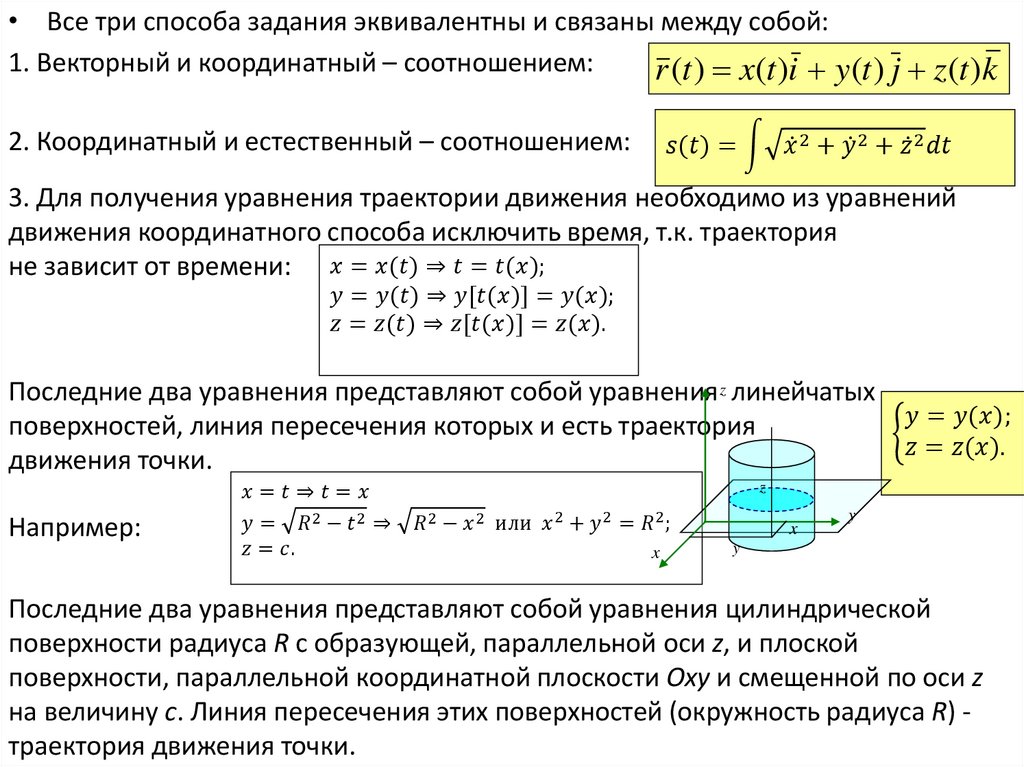
8.
• Все три способа задания эквивалентны и связаны между собой:1. Векторный и координатный – соотношением:
r (t ) x(t )i y(t ) j z (t )k
2. Координатный и естественный – соотношением: