 Физика
ФизикаПохожие презентации:



")


")



Принципы полета, классификация аэродинамических схем и органы управления ЛА
1.
Принципы полета, классификация аэродинамических схеми органы управления ЛА
Полет основан на преодолении гравитационной силы – GТ (силы тяжести (G), если рассматривать
относительно поверхности Земли).
Силу, преодолевающую силу тяжести, условно назовем подъемной силой (Y). В равномерном
горизонтальном полете подъемная сила уравновешивает силу тяжести (Y= – G).
Принцип полета определяется тем, каким образом и за счет чего создается подъемная сила. В
настоящее время техническое (практическое) значение имеют следующие принципы полета:
Баллистический – здесь сила Y определяется силой инерции летящего тела за счет начального
запаса скорости или высоты, т.е. фактически никакой подъемной силы здесь не создается,
поэтому баллистический полет называют также пассивным;
Ракетодинамический – здесь сила Y определяется реактивной силой, создаваемой за счет
отбрасывания части массы летящего тела. В соответствии с законом сохранения количества
движения системы возникает движение тела при отделении от него с какой-либо скоростью
некоторой части его массы;
Аэростатический – здесь сила Y определяется архимедовой силой, равной силе тяжести
вытесненной телом массы воздуха;
Аэродинамический – здесь сила Y определяется реактивной силой, создаваемой за счет
отбрасывания вниз части воздуха, обтекающего тело при его движении, т.е. определяется
силовым воздействием воздуха на движущееся тело.
Силу, преодолевающую сопротивление внешней среды, называют силой тяги (P). В равномерном
горизонтальном полете сила тяги уравновешивает силу сопротивления внешней среды:
P=–X
2.
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯГОСТ 20058 – Динамика летательных аппаратов в атмосфере
Летательным аппаратом (ЛА) называют устройство для полетов в атмосфере
или космическом пространстве
Типы ЛА (по расположению точек старта и цели)
o «Космос – космос»
o
«Космос – земля»
o «Воздух – земля» и «Земля – воздух»
o «Земля – земля»
o «Земля – воздух» и «Земля – космос»
3.
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯКрыло – часть ЛА, обеспечивающая подъемную силу при полете в атмосфере
Оперение – аэродинамические поверхности для обеспечения устойчивости и управляемости в
полете
Руль – подвижная поверхность, создающая аэродинамическую силу и момент, используемые
для управления ЛА в полете
Стабилизатор – неподвижная часть горизонтального оперения ЛА, служащая для обеспечения
продольной устойчивости в полете
Элерон – подвижная часть крыла, служит для управления креном ЛА
Элевоны –элероны с дополнительной функцией руля высоты
Система управления – совокупность управляемого объекта и устройства управления, действие
которой направлено на поддержание или улучшение работы объекта, т.е. комплекс средств
сбора, обработки, передачи информации и формирования управляющих сигналов или команд
4.
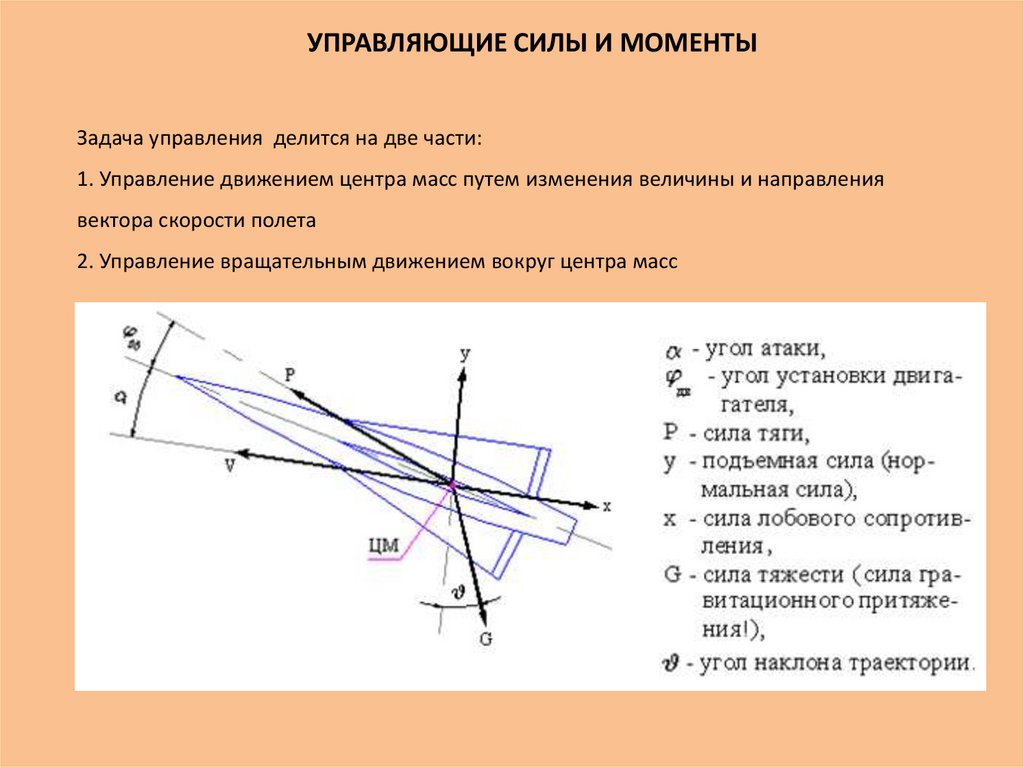
УПРАВЛЯЮЩИЕ СИЛЫ И МОМЕНТЫЗадача управления делится на две части:
1. Управление движением центра масс путем изменения величины и направления
вектора скорости полета
2. Управление вращательным движением вокруг центра масс
5.
ОРГАНЫ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИУстройства, с помощью которых регулируется величина управляющих сил и
моментов, называются органами управления.
Устройства, которые создают управляющие моменты, необходимые для
угловой стабилизации, называют органами стабилизации
6.
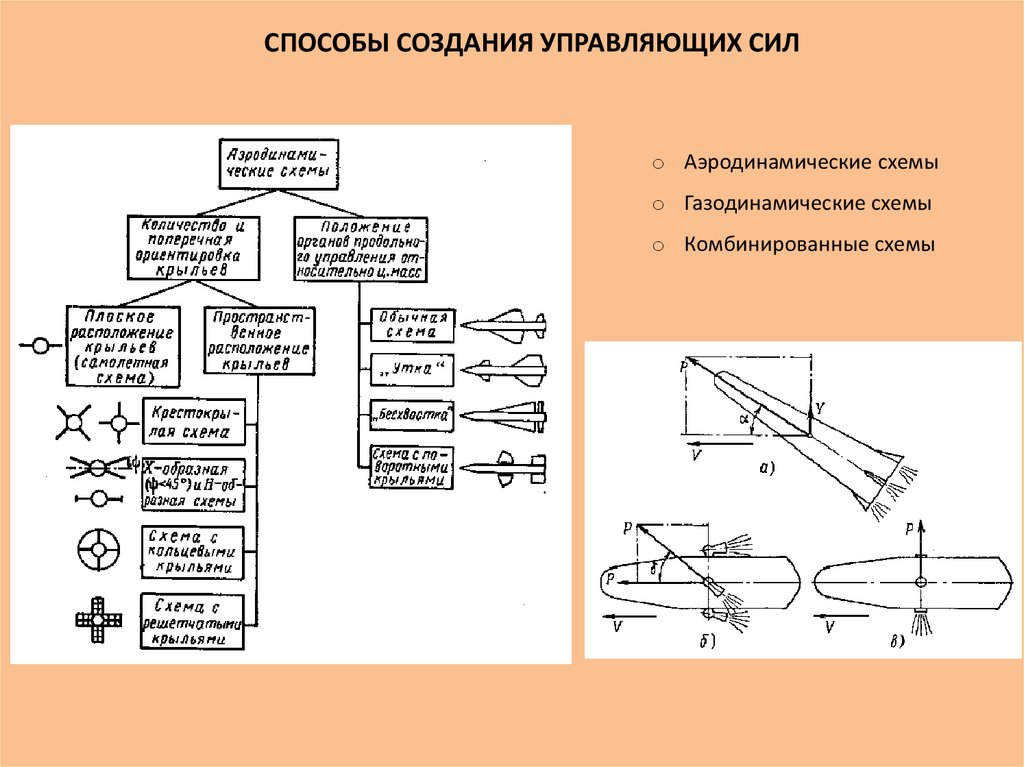
СПОСОБЫ СОЗДАНИЯ УПРАВЛЯЮЩИХ СИЛo Аэродинамические схемы
o Газодинамические схемы
o Комбинированные схемы
7.
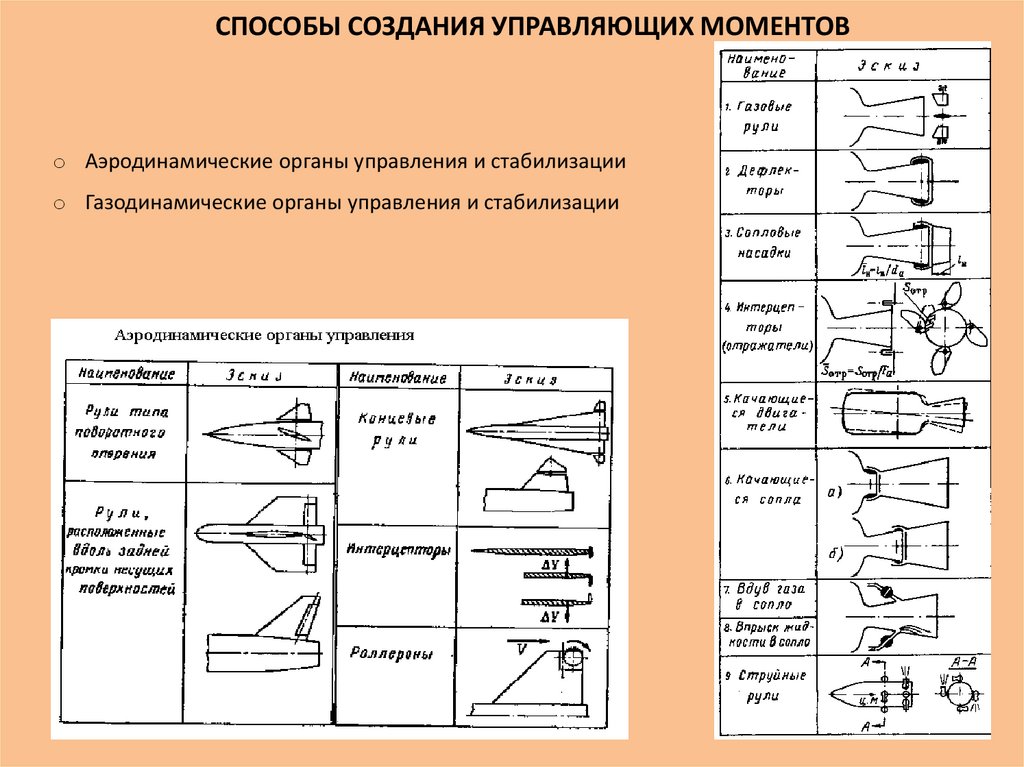
СПОСОБЫ СОЗДАНИЯ УПРАВЛЯЮЩИХ МОМЕНТОВo Аэродинамические органы управления и стабилизации
o Газодинамические органы управления и стабилизации
8.
ВОЗМУЩАЮЩИЕ СИЛЫ И МОМЕНТЫВоздействия, вызванные внешними по отношению к
ЛА причинами
Воздействия, вызванные внутренними процессами
происходящими в ЛА
Разброс исходных данных
9.
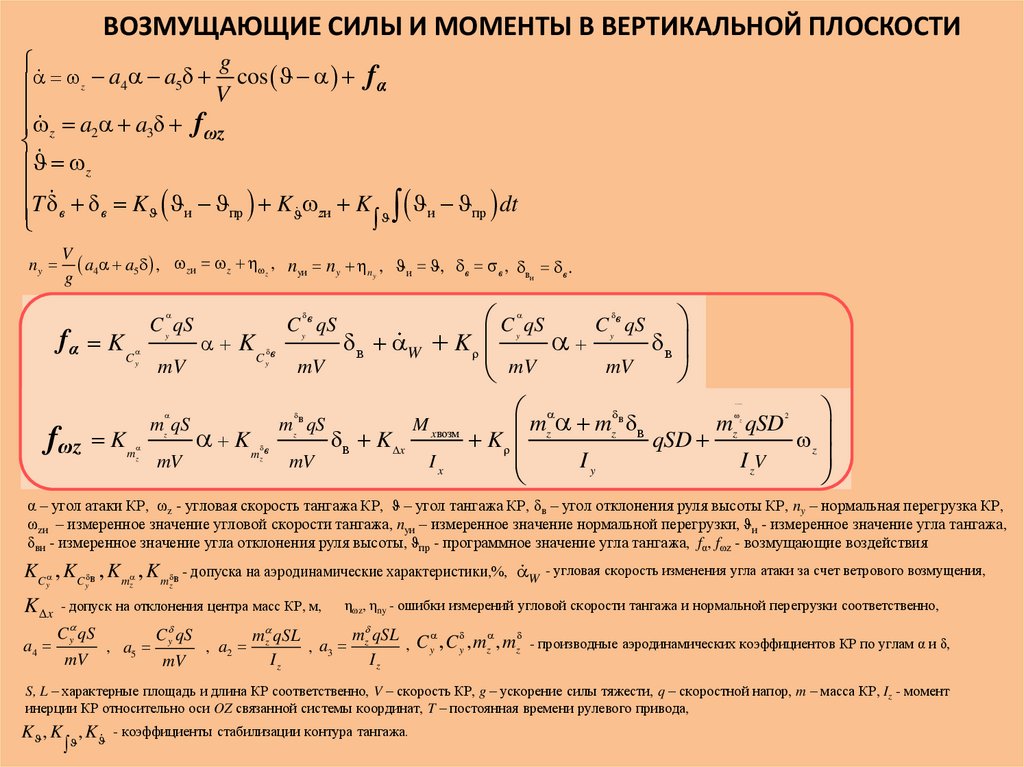
ВОЗМУЩАЮЩИЕ СИЛЫ И МОМЕНТЫ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИg
a
a
cos fα
z
4
5
V
z a2 a3 fωz
z
T в в K и пр K zи K и пр dt
ny
V
a4 a5 , zи z z , nyи ny ny , и , в в , ви в .
g
fα K C
y
C qS
C в qS
в W K
в
mV
mV
mV
C y qS
K
mV
C y в qS
Cyв
y
y
m m в
m qS
m qS
M xвозм
mz qSD
z
z
в
Km в
в K x
K
qSD
z
fωz K m
mV
mV
Ix
Iy
I zV
___
z
z
z
в
z
2
z
α – угол атаки КР, ωz - угловая скорость тангажа КР, ϑ – угол тангажа КР, δв – угол отклонения руля высоты КР, ny – нормальная перегрузка КР,
ωzи – измеренное значение угловой скорости тангажа, nyи – измеренное значение нормальной перегрузки, ϑи - измеренное значение угла тангажа,
δви - измеренное значение угла отклонения руля высоты, ϑпр - программное значение угла тангажа, fα, fωz - возмущающие воздействия
K C , K C в , K m , K m в - допуска на аэродинамические характеристики,%, W - угловая скорость изменения угла атаки за счет ветрового возмущения,
y
y
z
z
K x - допуск на отклонения центра масс КР, м,
a4
C y qS
mV
, a5
C y qS
mV
, a2
ηωz, ηny - ошибки измерений угловой скорости тангажа и нормальной перегрузки соответственно,
m qSL C , C , m , m - производные аэродинамических коэффициентов КР по углам α и δ,
m z qSL
, y
, a3 z
y
z
z
Iz
Iz
S, L – характерные площадь и длина КР соответственно, V – скорость КР, g – ускорение силы тяжести, q – скоростной напор, m – масса КР, Iz - момент
инерции КР относительно оси OZ связанной системы координат, T – постоянная времени рулевого привода,
K , K , K - коэффициенты стабилизации контура тангажа.
10.
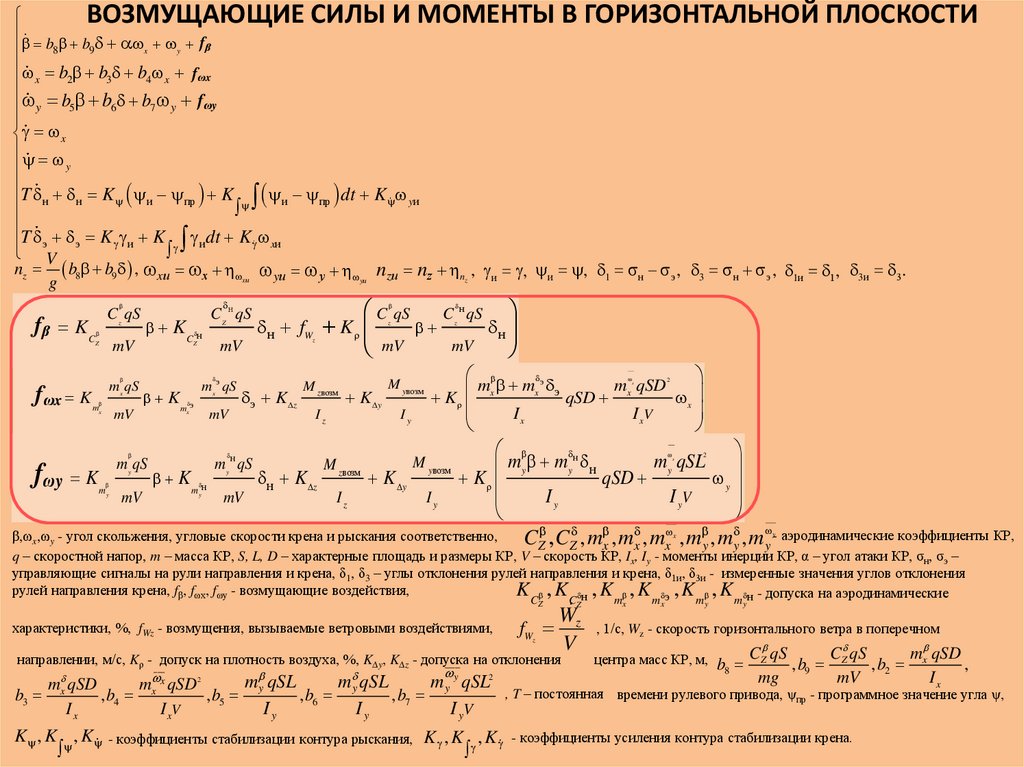
ВОЗМУЩАЮЩИЕ СИЛЫ И МОМЕНТЫ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИb b f
β
8
9
x
y
x b2 b3 b4 x fωx
y b5 b6 b7 y fωy
x
y
T K K dt K
н
и
пр
пр
yи
н
и
T э э K и K и dt K xи
V
nz b8 b9 , xи x yи y nzи nz n , и , и , 1 н э , 3 н э , 1и 1 , 3и 3 .
g
xи
fβ KC
Z
C qS C н qS
н fW K
н
mV
mV
mV
Н
C z qS
K
mV
z
yи
CZ qS
CZ н
z
z
z
___
M yвозм
m
m xqS
qS
m xээqS
qS
M zвозм
m x m
m xээ э
m x qSD2
M
m
m
M
y
возм
x
x
z
возм
x
x
э qSD mx qSD x
K
K
K
K
K
ωx
э
э
z
y
K
qSD I V x
ωx K mm mV K mm э mV э K z I K y I
I
mV
mV
I zz
I yy
I xx
I xxV
ff
___
2
x
x
x
x
x
x
m
qSL
myy qSL
m m н
m
yy m yy н
н
K
qSD
yy
Iy
I yV
___
___
fωy K
y
m
m yy
m y нн qS
m
qS
m
m y qS
qS
K нн
y
mV
m
m yy
mV
н K zz
M
M zвозм
zвозм
Iz
K yy
M
M yвозм
yвозм
Iy
x
н
Z
x
Z
x
___
x
x
2
2
y
___
y
y
β,ωx,ωy - угол скольжения, угловые скорости крена и рыскания соответственно,
C C , m , m , mx , m , m , my - аэродинамические коэффициенты КР,
q – скоростной напор, m – масса КР, S, L, D – характерные площадь и размеры КР, V – скорость КР, Ix, Iy - моменты инерции КР, α – угол атаки КР, σн, σэ –
управляющие сигналы на рули направления и крена, δ1, δ3 – углы отклонения рулей направления и крена, δ1и, δ3и - измеренные значения углов отклонения
рулей направления крена, fβ, fωx, fωy - возмущающие воздействия,
K C K C н K m K m э K m K m н - допуска на аэродинамические
,
,
Z
характеристики, %, fWz - возмущения, вызываемые ветровыми воздействиями,
,
Z
W
fW z
V
z
,
x
,
x
,
y
y
, 1/с, Wz - скорость горизонтального ветра в поперечном
центра масс КР, м, b CZ qS , b CZ qS , b mx qSD ,
направлении, м/с, Kρ - допуск на плотность воздуха, %, K∆y, K∆z - допуска
___ на отклонения
___
8
9
2
mg
mV
Ix
my qSL
m y qSL
my y qSL2
m x qSD
m x x qSD 2
,
T
–
постоянная
времени
рулевого
привода,
ψ
программное
значение
угла ψ,
b3
, b4
, b5
, b6
, b7
пр
Ix
I xV
Iy
Iy
I yV
K , K , K - коэффициенты стабилизации контура рыскания, K , K , K - коэффициенты усиления контура стабилизации крена.