








 Информатика
Информатика Физика
ФизикаПохожие презентации:
, как объекта оптимального управления")

")




")
")

Тема 4. Математические модели вертолета как объекта управления
1.
Тема 4. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ВЕРТОЛЕТАКАК ОБЪЕКТА УПРАВЛЕНИЯ
2.
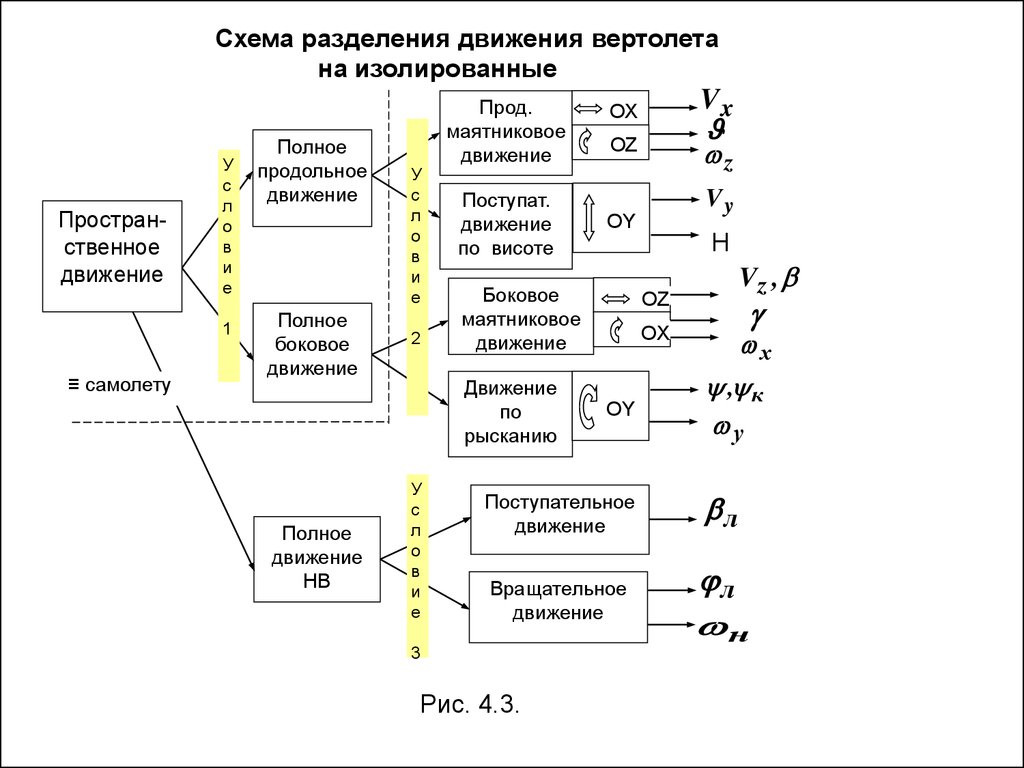
Схема разделения движения вертолетана изолированные
Пространственное
движение
У
с
л
о
в
и
е
1
≡ самолету
Полное
продольное
движение
Полное
боковое
движение
Полное
движение
НВ
У
с
л
о
в
и
е
2
Прод.
маятниковое
движение
Поступат.
движение
по висоте
У
с
л
о
в
и
е
Vy
Н
Vz ,
ОZ
ОX
ОY
Вращательное
движение
Рис. 4.3.
z
ОY
Поступательное
движение
3
ОZ
Боковое
маятниковое
движение
Движение
по
рысканию
Vx
ОХ
х
, к
у
л
л
н
3.
ЛИНЕЙНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ВЕРТОЛЕТАОХ
ОY
V
1. V x aVxx Vx a x y V y a x z z a x a x z z a x f xв ;
V
2. V y aVyx Vx a y y V y a y z z a y a y a y z z f yв ;
ОZ
3. V z aVzz Vz a z x x a z y y a z a z x x a z рв рв f zв ;
ОХ
4. x amVzx Vz am xx x amxy y am xx x amрвx рв mxв ;
ОY
5. y amVzy Vz am xy x am yy y am xy x amрвy рв m yв ;
ОZ
V
6. z amVxz Vx amyz V y am zz z am zz z am z mzв ;
V
7. H ah y V y 0;
8. Z V ;
9. ;
z
10. x ;
11. y ;
12. сн .
4.
4.6 . Математические модели движения вертолетаБез учета возмущений и динамики НВ уравнения ПМД :
s a V s a
a V s s
z
Vx
x
x
Vx
mz
x
x
2
s s a
s a x s a x z z s ;
am zz
m z z s .
z
(4.4)
Уравнениям (4.4) соответствует структурная схема, изображенная на рис. 4.4.
a x z
─
Vx
1
s aVxx
amVxz
z
a x z s a x
a
z
mz
─
1
s am zz
Рис. 4.4
z
1
s
z
5.
Неустойчивость ПМД вытекает из конструктивныхособенностей вертолета: он в некоторой степени
аналогичен физическому маятнику.
Центр масс вертолета находится ниже плоскости
вращения НВ. Вследствие перемещения точки
подвеса - АПК - вертолет постоянно
раскачивается, что является причиной
неустойчивости ПМД.
Im
Переходные процессы по тангажу и
продольной составляющей скорости
вертолета на режиме крейсерского полета.
S2
S1
Re
S3
Vx ,
Vx
Рис. 4.5
t
Рис. 4.6
6.
ЛЕКЦИЯ № 134.6.1. Продольное маятниковое движение
Запишем ПФ вертолета по тангажу и продольный составляющей скорости:
Vx
z
z Vx
a
s
a
a
s
mz
x
x amz
z
W s
.
z s
n s
(4.6)
z 2
z z
z z
z
a
s
a
a
a
a
s
a
V
s
x
mx x
mx x
mz a x
z
x
WVx s
.
z s
n s
(4.7)
n s s 3 aVxx am zz s 2 aVxx am zz a x z amVxz s a x amVxz .
На режиме «висение»
Vx 0 :
при
amz
где k z z
z
am
T
1
z
k
1
1
z
z
W s
W z s ,
T s 1 s
s
коэффициент усиления вертолета по углу тангажа,
(4.9)
z
постоянная времени по тангажу (быстродействие
am
или инерционность вертолета в ПМД).
z
z
(4.8)
(4.10)
7.
4.6.2. Изолированное движение по высотеМатематические условия выделения движения по высоте из уравнений
продольного движения имеют вид:
(4.11)
Vх 0; бал. ; z 0.
Изолированное движение вертолета по высоте описывается уравнениями:
V
V y a y y Vy a y 0 0 ;
H Vy 0
(4.12)
,
в операторной форме они могут быть представлены следующей структурной
схемой :
0
0
ау
1
V
s ауy
Н
V y 1
s
Рис. 4.7
Составим ПФ
вертолета по V y
iH:
WV y0 s
Vy s
0 s
kV y0
TVy s 1
1
WH 0 s WV y0 ,
s
;
(4.13)
(4.14)
8.
0Н
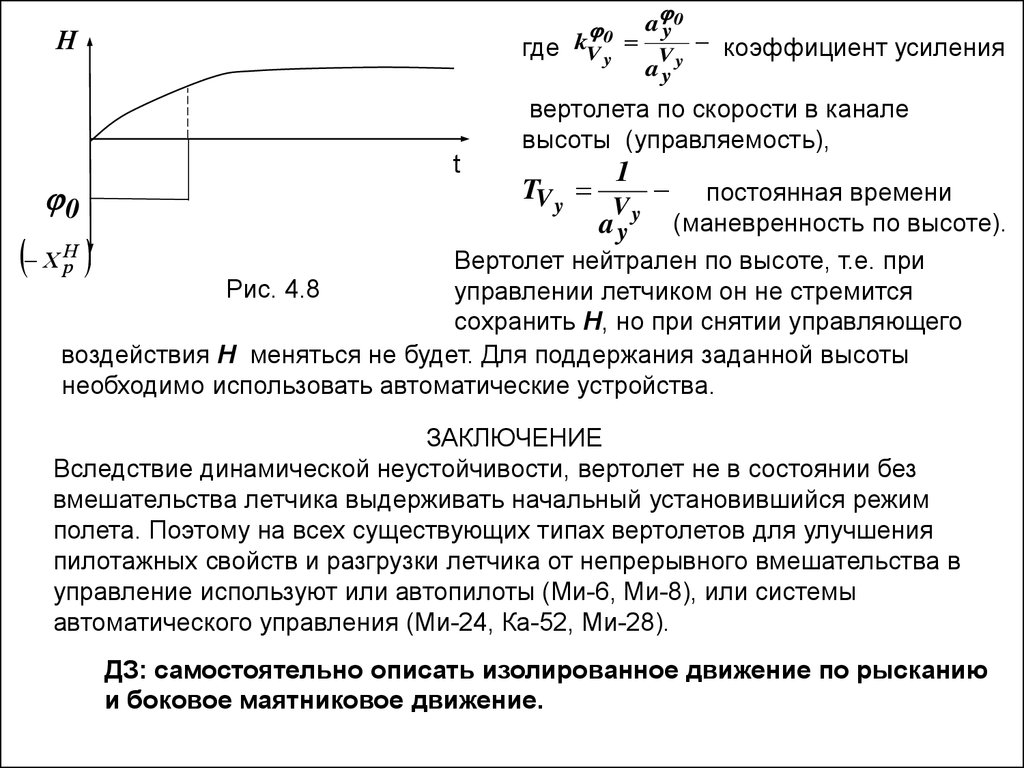
где kV y
a y 0
V
ayy
коэффициент усиления
вертолета по скорости в канале
высоты (управляемость),
t
1
постоянная времени
Vy
(маневренность по высоте).
ay
ХН
Вертолет нейтрален по высоте, т.е. при
р
Рис. 4.8
управлении летчиком он не стремится
сохранить Н, но при снятии управляющего
воздействия Н меняться не будет. Для поддержания заданной высоты
необходимо использовать автоматические устройства.
0
TV y
ЗАКЛЮЧЕНИЕ
Вследствие динамической неустойчивости, вертолет не в состоянии без
вмешательства летчика выдерживать начальный установившийся режим
полета. Поэтому на всех существующих типах вертолетов для улучшения
пилотажных свойств и разгрузки летчика от непрерывного вмешательства в
управление используют или автопилоты (Ми-6, Ми-8), или системы
автоматического управления (Ми-24, Ка-52, Ми-28).
ДЗ: самостоятельно описать изолированное движение по рысканию
и боковое маятниковое движение.
9.
4.7. Автопилотное контуры САУ-ВРассмотрим реализацию работы САУ в путевом канале управления
вертолетом на режиме «Ст. курса».
4.7.1. Режим стабилизации курса "Ст. к "
Предназначен для стабилизации заданного направления полета, позволяет
разгрузить летчика для решения боевых задач. Закон управления в канале
направления обеспечивает изменение шага РВ РВ и учитывает наличие в
комбинированном агрегате управления (КАУ) режима "Перегонки". Перегонка
возникает при выходе штока сервопривода САУ на упор, в результате,
например, значительных возмущений, действующих на вертолет.
у уАП уП ,
(4.15)
0 ,2 ул
max
л
где уmax - отклонение управляющего органа –педалей летчиком;
1
yП k П f yAП
s
(4.16)
отклонения управляющего органа от "перегонки" : расширяется диапазон
отклонения РВ, повышается маневренность;
kП - коэффициент, определяющий скорость "перегонки";
10.
T1sky
y k y к к зад. ;
T1s 1
к зад. квкл . кц , кц max 5 ;
АП
у
y
(4.17)
(4.18)
к курс вертолета в момент включения режима;
вкл
к
курс вертолета, изменяется поворотом ручки центровки на ПУ-Н
без выключения САУ.
T1 s
Дифференциальный
фильтр (виражный механизм) служит для
T1 s 1
ц
устранения постоянной составляющей y ,
которая возникает при выполнении разворотов.
Это позволяет повысить управляемость, не
снижая демпфирования (за счет выбора Т1).
В канале направления используется СП с ЖОС.
11.
кk у
Ст. к
с “Перегонкой”
Ст.
без “Перегонки”
к
к
к зад . 0
1
k y
t
Рис. 4.9
Совмещенное управление в режиме "Ст. к "
Вертолет пилотируется летчиком при включенном режиме стабилизации.
Шаг рулевого винта у изменяется по закону :
у ул уАП
где
ул k X П X П
y
(4.19)
изменение общего шага РВ нажатием педалей;
12.
1T s
1 .
уАП k y y
y
2
T1 s 1
(4.20)
При нажатии летчиком на педали с помощью кнопок на подпедальниках
стабилизация курса отключается. В противном случае контур стабилизации
курса будет мешать управлению.
Автопилот выполняет роль демпфера. Порция сигнала демпфирования
уменьшена в два раза, по сравнению с законом (4.17) с целью увеличения
эффективности управления.
4.7.2. Режим стабилизации крена "Ст.
"
Закон управления наклоном автомата перекоса (АПК) имеет вид (поперечное
управление):
хАПК хАП
0 ,2 хл
х
k
х х k х зад. ,
(4.21)
max
где
зад.
вкл. ц , ц max 5 .
Закон управления (4.21) соответствует статическому с ЖОС.
(4.22)
13.
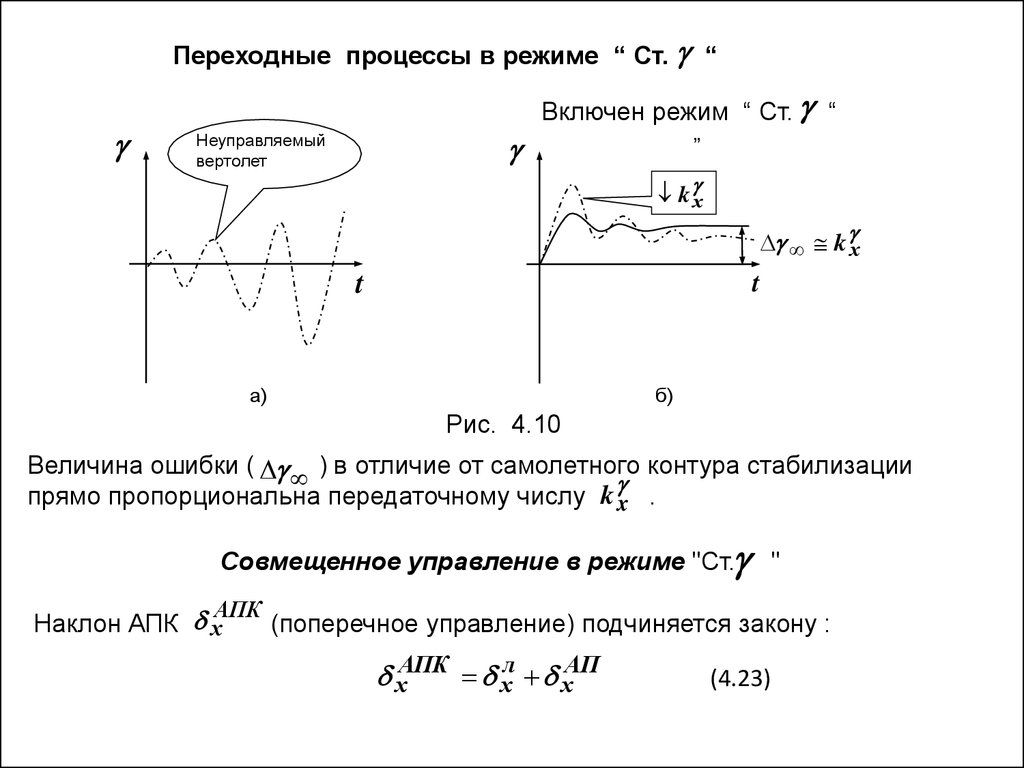
Переходные процессы в режиме “ Ст. “Включен режим “ Ст. “
Неуправляемый
вертолет
”
k х
k х
t
t
а)
б)
Рис. 4.10
Величина ошибки ( ) в отличие от самолетного контура стабилизации
прямо пропорциональна передаточному числу k x .
Совмещенное управление в режиме "Ст.
"
АПК
Наклон АПК х
(поперечное управление) подчиняется закону :
хАПК хл хАП
(4.23)
14.
Рассмотрим особенности формирования составляющей хАП .Полярность сигнала выбрана так, что перемещение выходного штока бустера
в КАУ-К от САУ противоположно перемещению от ручки летчика. В результате
поворот АПК от САУ будет равен:
T s
1
хАП k х х х 2 k х хл ,
2
T2 s 1
(4.24)
где k х передаточное число по сигналу КД-К.
При поперечном отклонении ручки управления (РЦШ) за счет
срабатывания кнопки датчика усилий стабилизация крена автоматически
выключается. Сигнал ДУС-К остается для обеспечения демпфирования
вертолета по крену, хотя и его недостаточно для обеспечения устойчивости
вертолета, так как:
-вертолет имеет малый момент инерции вокруг продольной оси, он чуток к
резким движениям ручки управления в поперечном направлении.
- имеет место эффект «запаздывания" в управлении.
В результате летчик, пытаясь сохранить положение вертолета по крену,
может раскачать вертолет. Чтобы предотвратить это явление в канале крена
применяется компенсационный датчик (КД - К).
Сигнал КД-К, пропорциональный отклонению ручки летчика, поступает в
вычислитель САУ, где пропускается через дифференциальный фильтр T2 s
T2 s 1
15.
Подставим (4.24) в (4.23) и предположим, что k х 1 , получим:1 х
T2 s л 1 х
1
л
хАПК k
1
k
х
х
х 2 х х T s 1 х ,
2
T
s
1
2
2
(4.25)
т.е. возникает эффект введения в контур ручного управления инерционного
фильтра. Таким образом, использование КД-К обеспечивает снижение
колебательности по крену за счет устранения ВЧ составляющих отклонения
ручки управления.
Уменьшение порции демпфирования в два раза при ручном (совмещенном)
управлении обеспечивает повышение управляемости по крену.
ЗАКЛЮЧЕНИЕ
Применение автопилота, работа которого происходит совместно с работой
ручной системы, позволяет улучшить показатели управляемости вертолета.
Одновременно решаются задачи обеспечения автономности управления и
устойчивости движения вертолета.