
 Электроника
ЭлектроникаПохожие презентации:










Система слежения сварочного робота на основе ультразвуковой триангуляции
1.
Московский физико-технический институт(национальный исследовательский университет)
Магистерская диссертация на тему:
«Система слежения сварочного робота на основе
ультразвуковой триангуляции»
Студент:
Хабибуллин Фарит Ринатович
Научный руководитель:
Чащухин Владислав Григорьевич
Москва 2024
1
2.
Цели:- разработка и создание системы слежения сварочного робота на основе
ультразвуковой триангуляции и диагностики дуги.
Задачи:
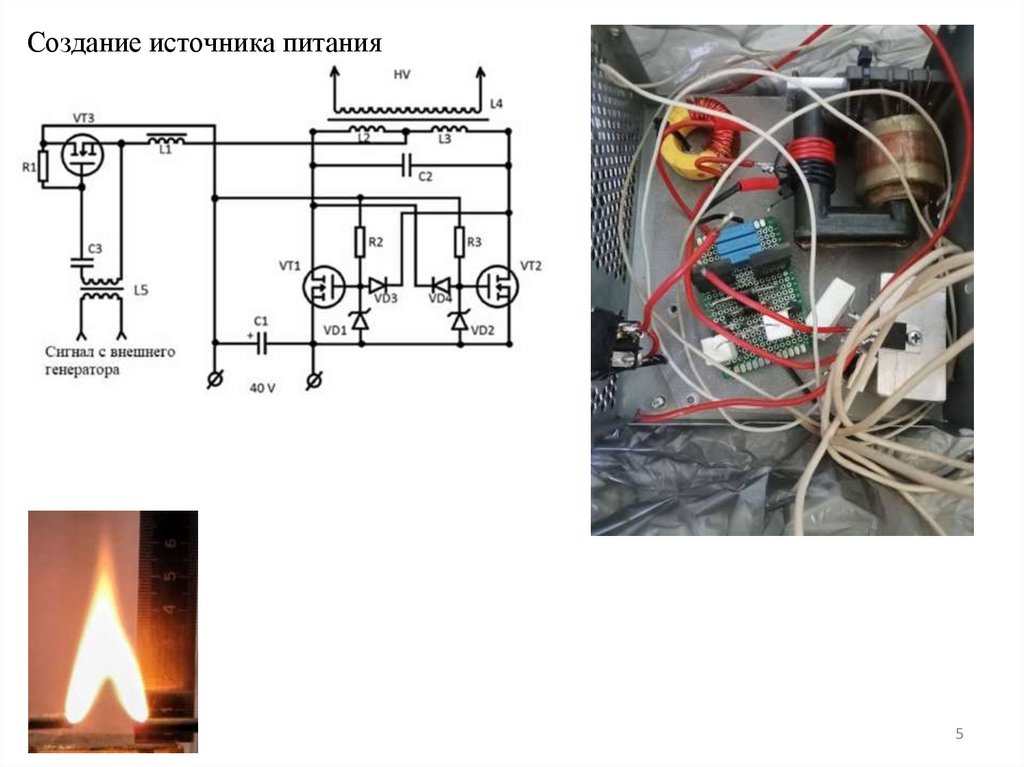
- создание источника питания дуги с генерацией ультразвукового сигнала;
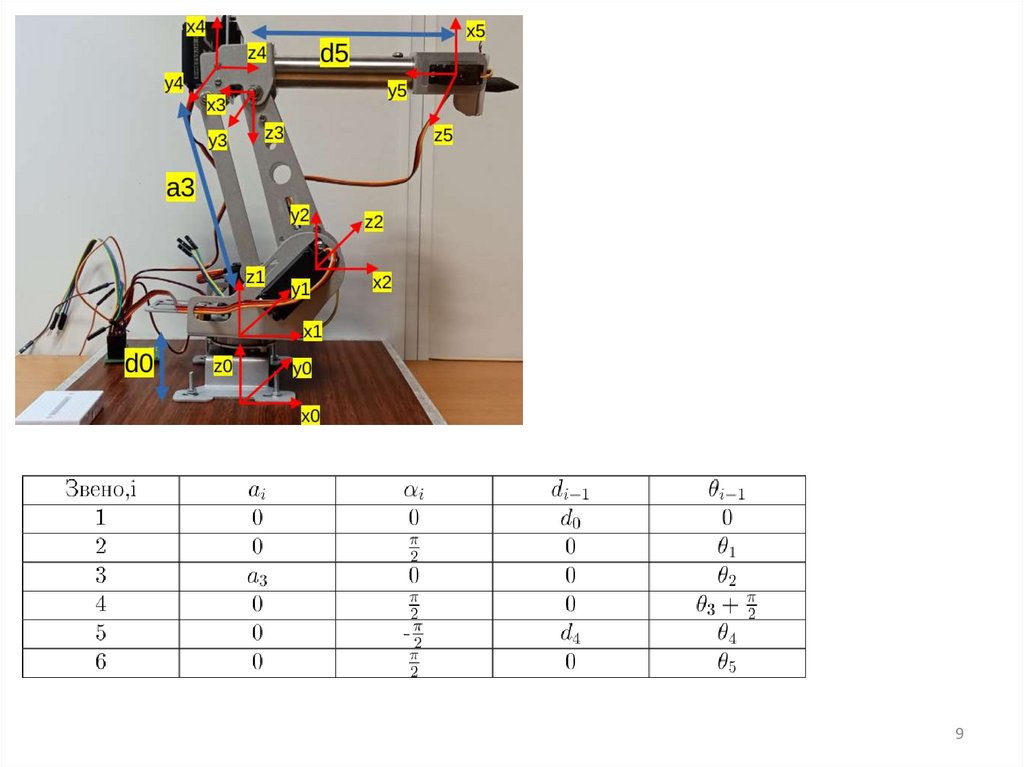
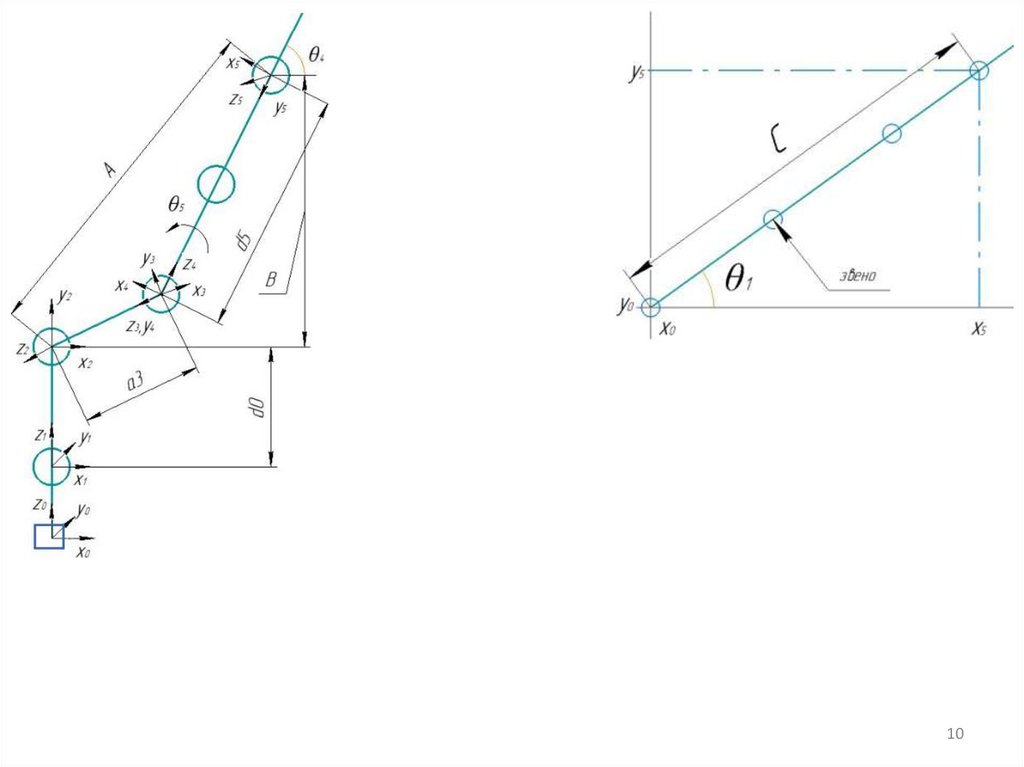
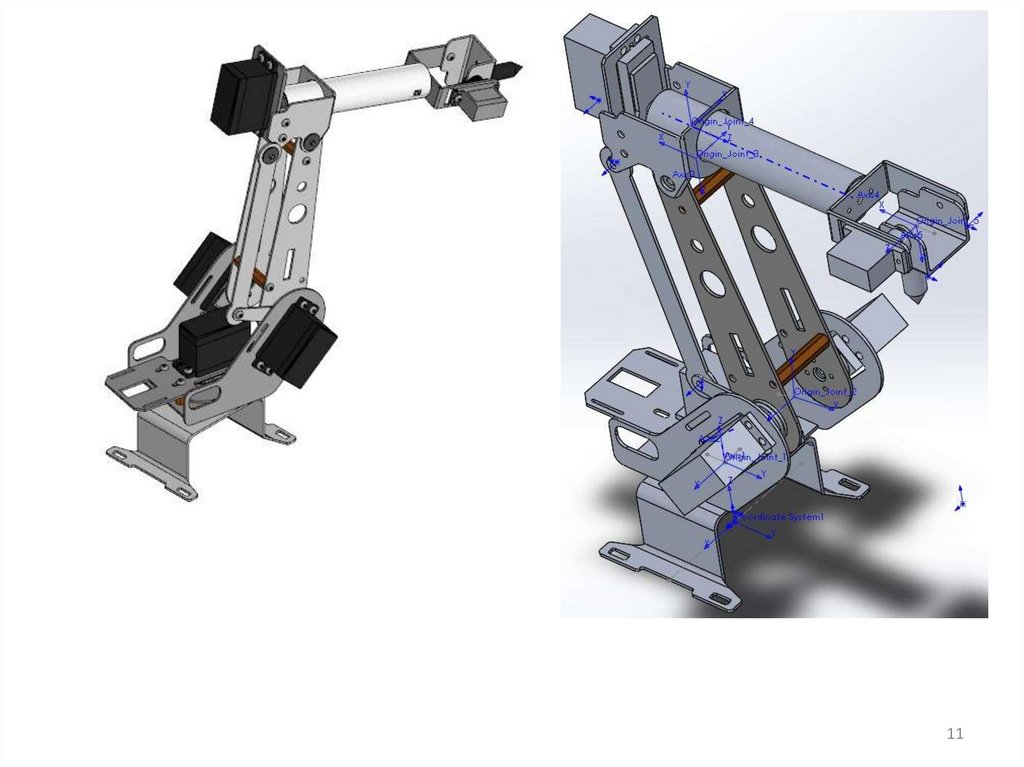
- разработка модели работы пятизвенного манипулятора с обратной связью и ее
реализация;
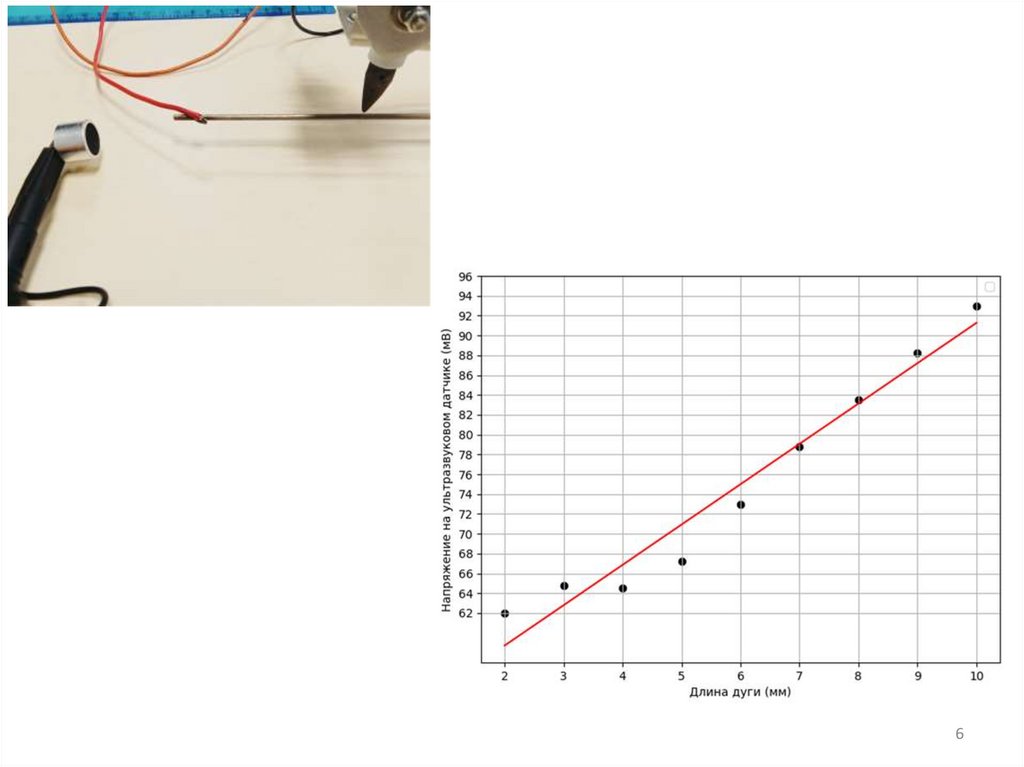
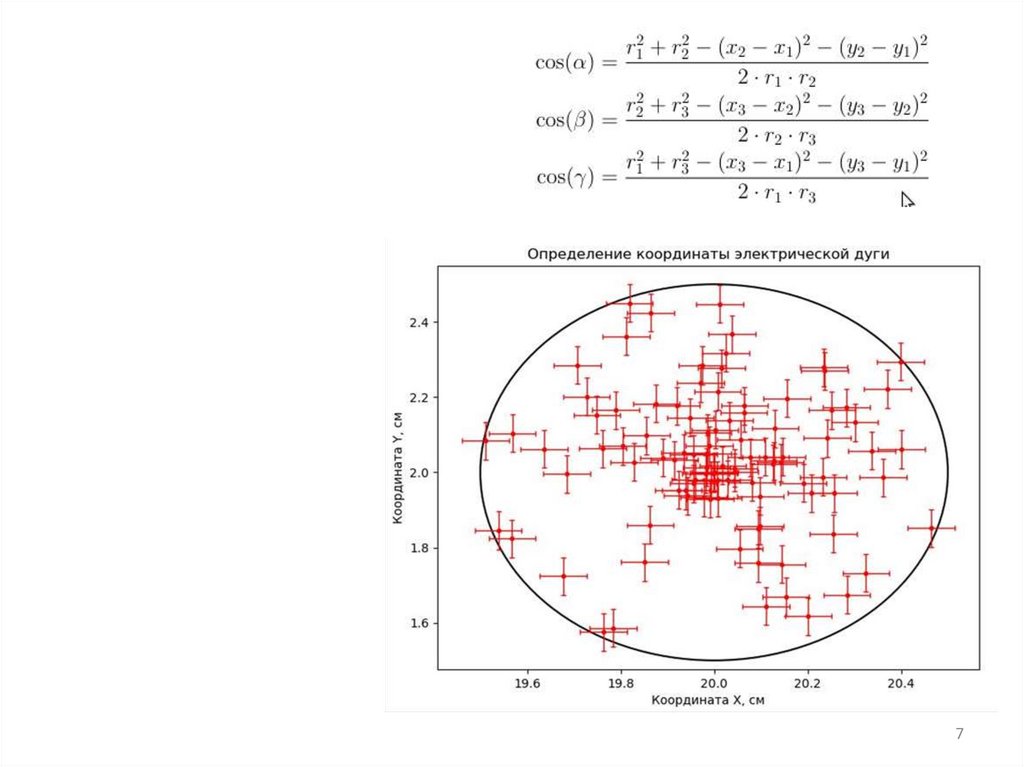
- создание системы ультразвуковой триангуляции сварочной дуги с помощью
ультразвуковых датчиков;
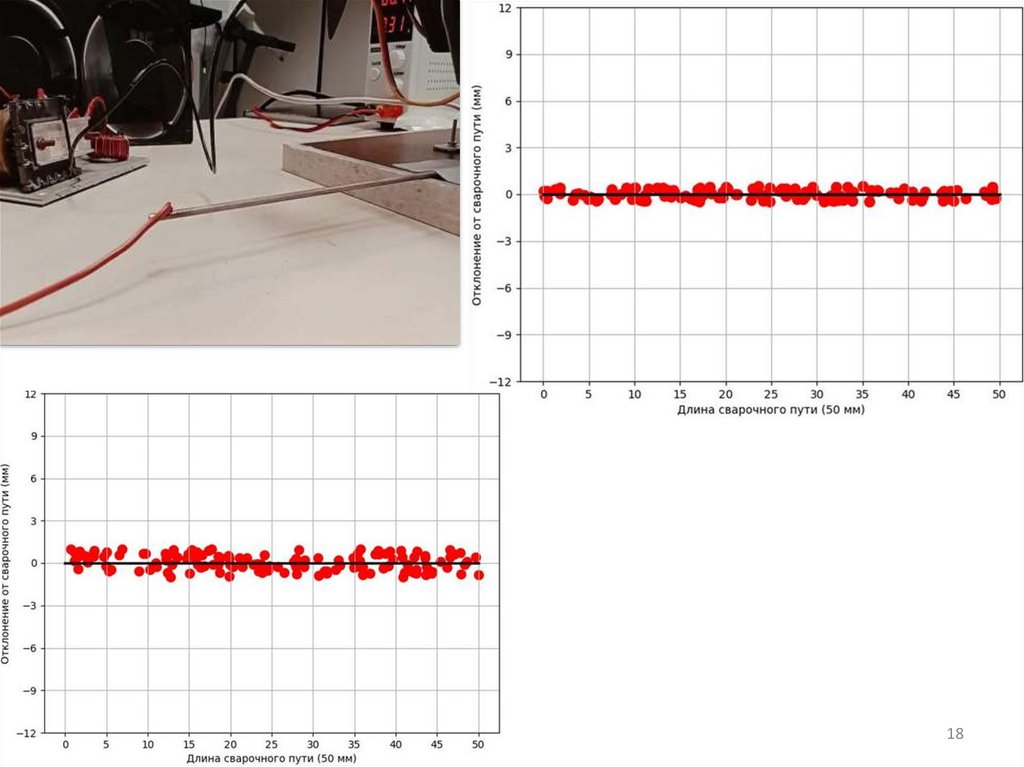
- проведение экспериментов с целью сравнения траектории дуги с заданным
движением сварочного манипулятора и вычисленным;
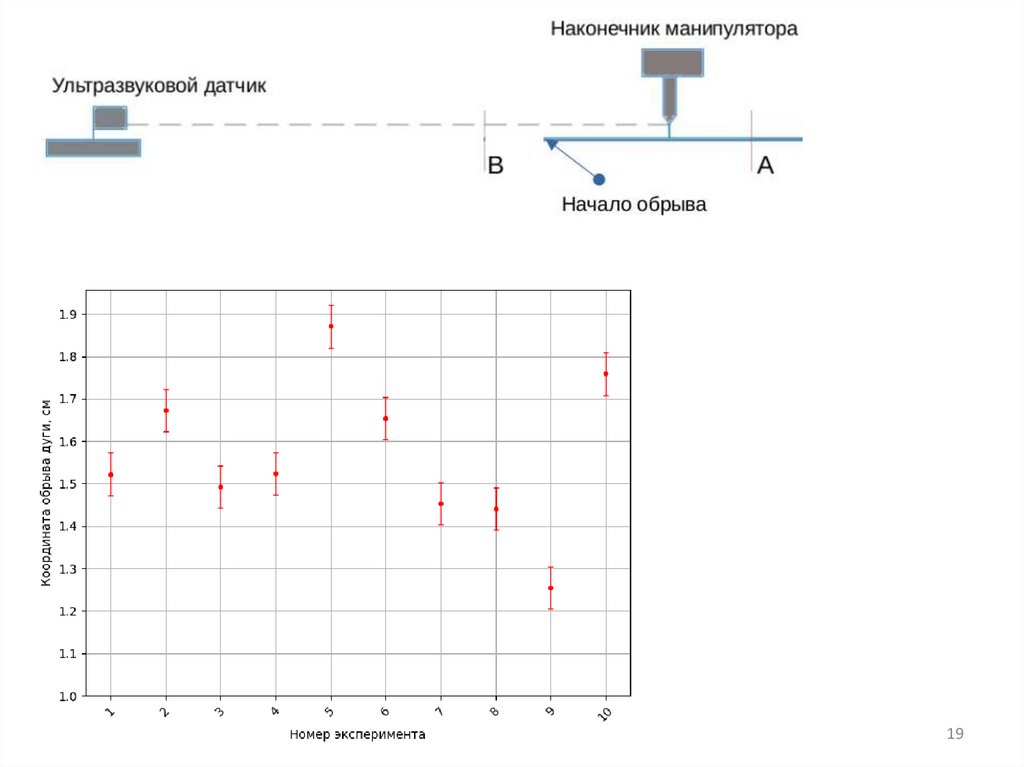
- проведение экспериментов по остановке манипулятора по детектированию
обрыва дуги;
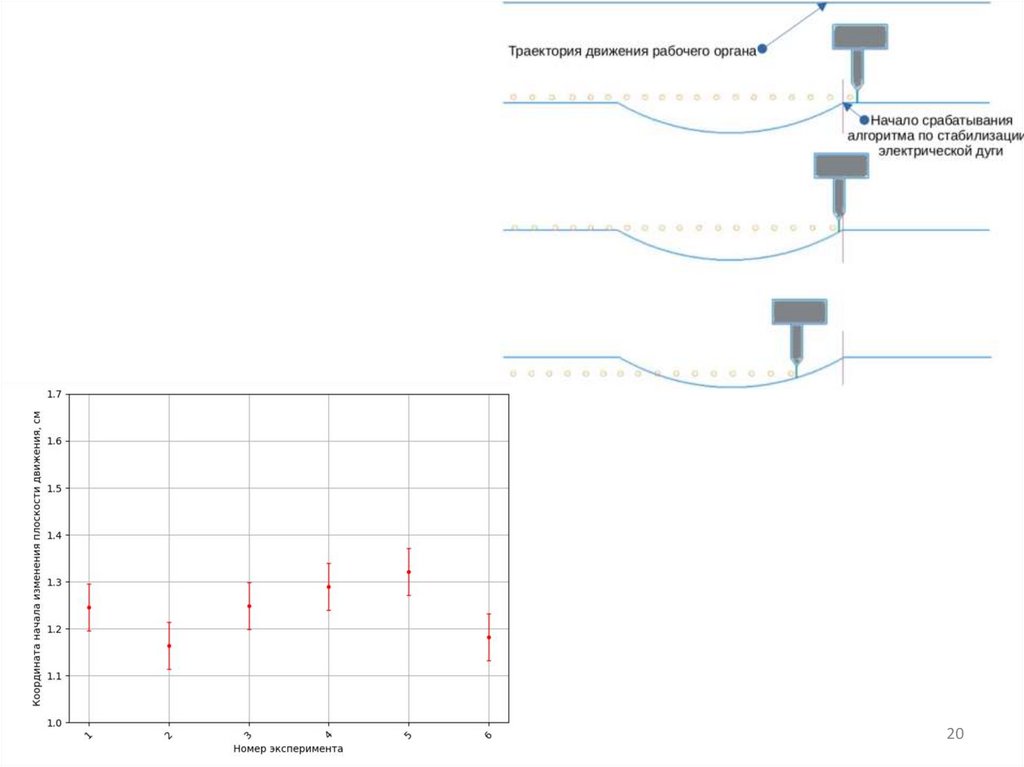
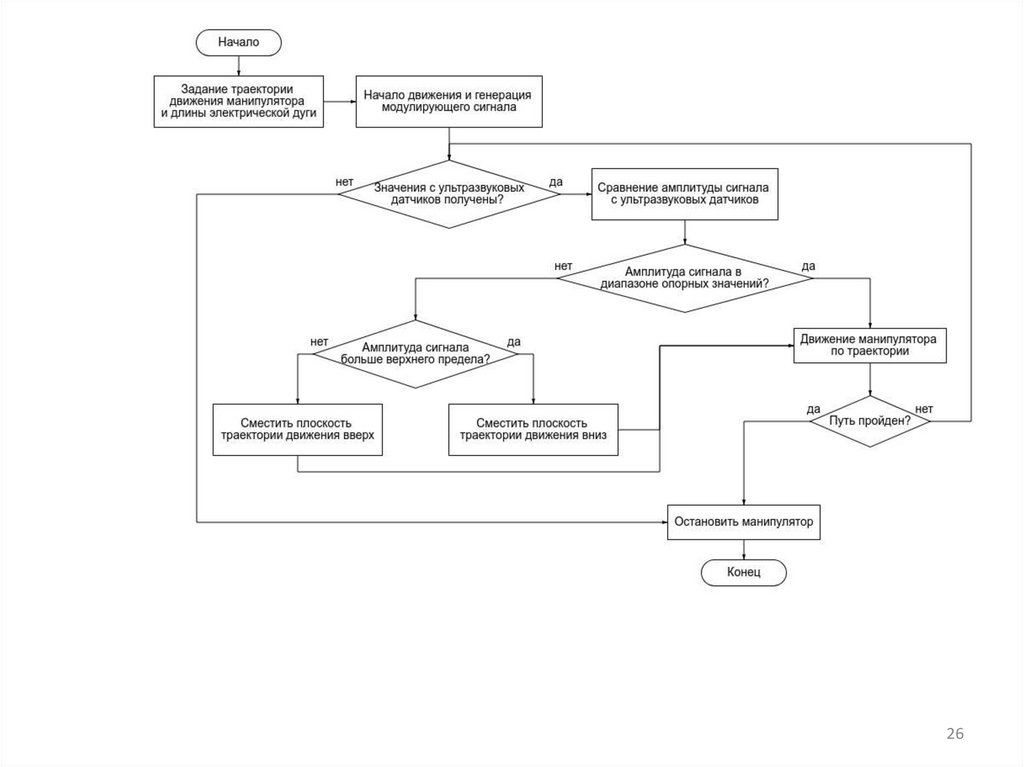
- выполнение экспериментов по диагностике электрической дуги с целью
регулирования ее длины во время движения рабочего органа;
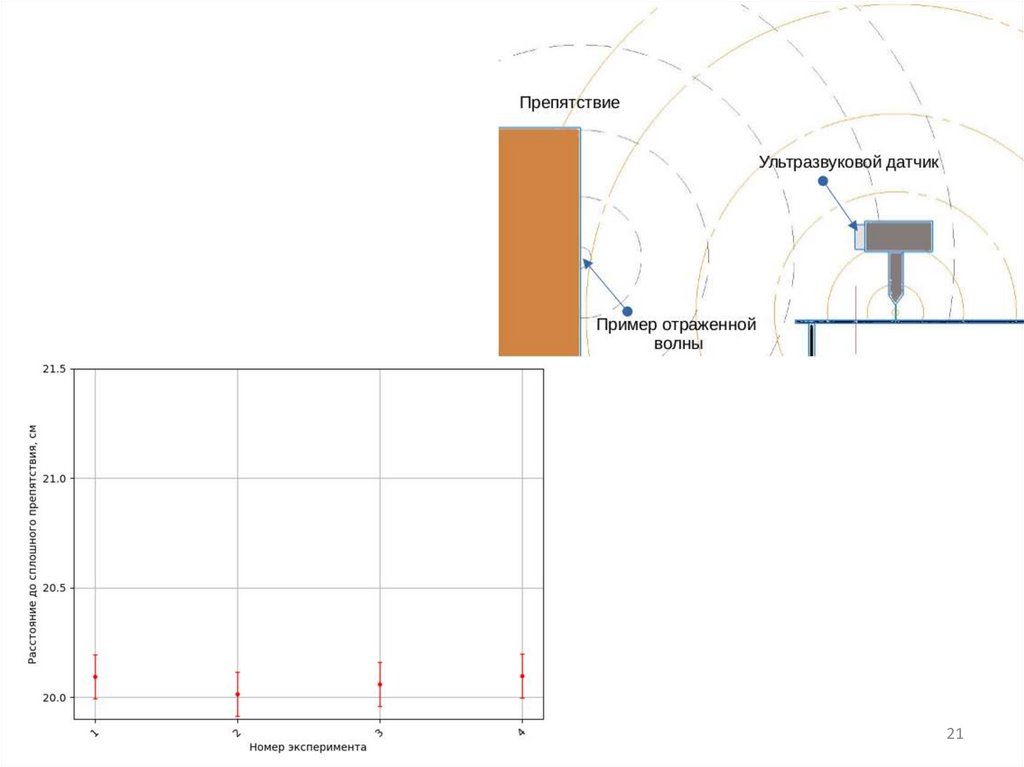
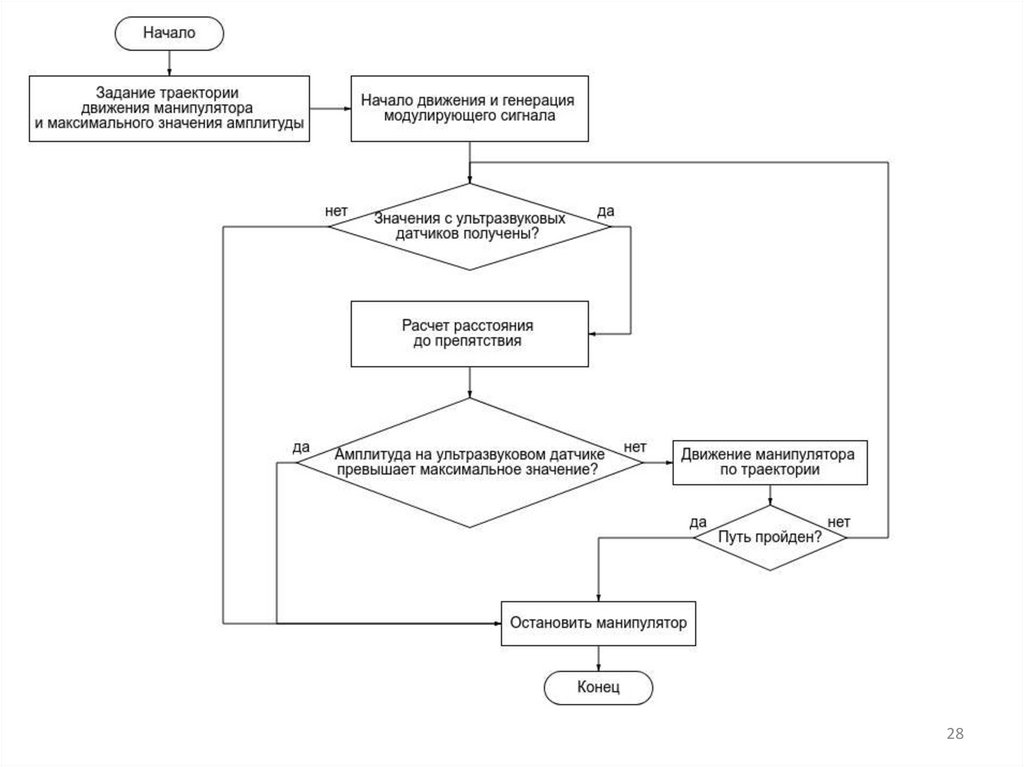
- выполнение экспериментов на обнаружение препятствий с использованием
эхолокации ультразвуковыми колебаниями от электрической дуги.
2
3.
Постановка проблемы:3
4.
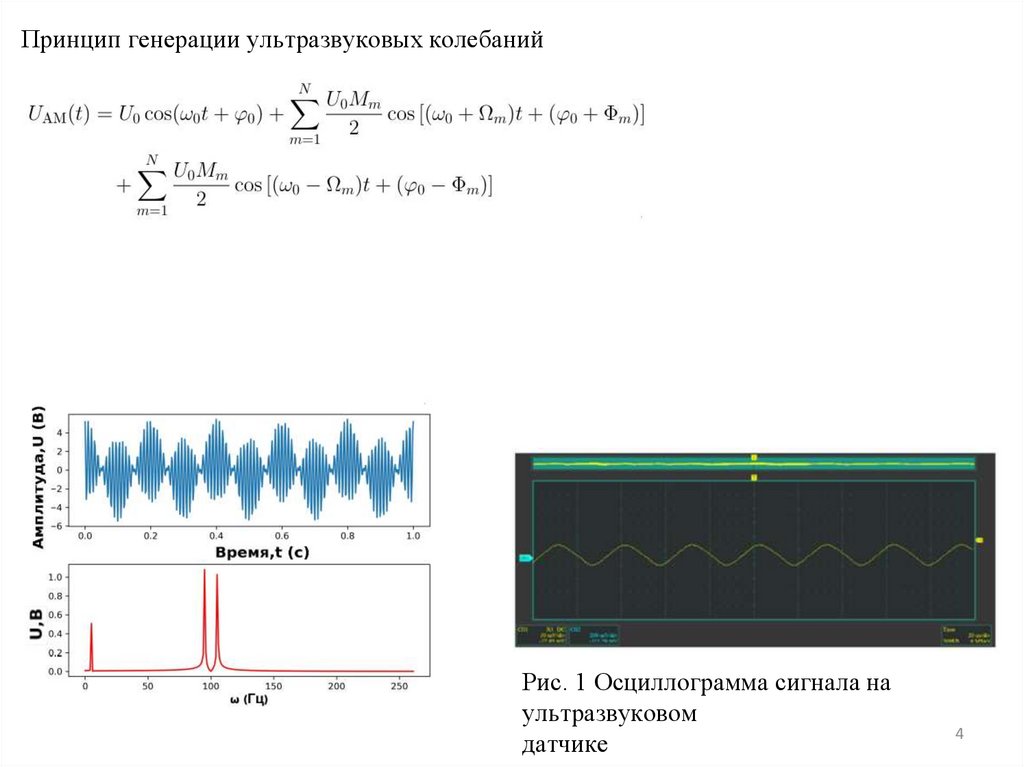
Принцип генерации ультразвуковых колебанийРис. 1 Осциллограмма сигнала на
ультразвуковом
датчике
4
5.
Создание источника питания5
6.
67.
78.
89.
910.
1011.
1112.
1213.
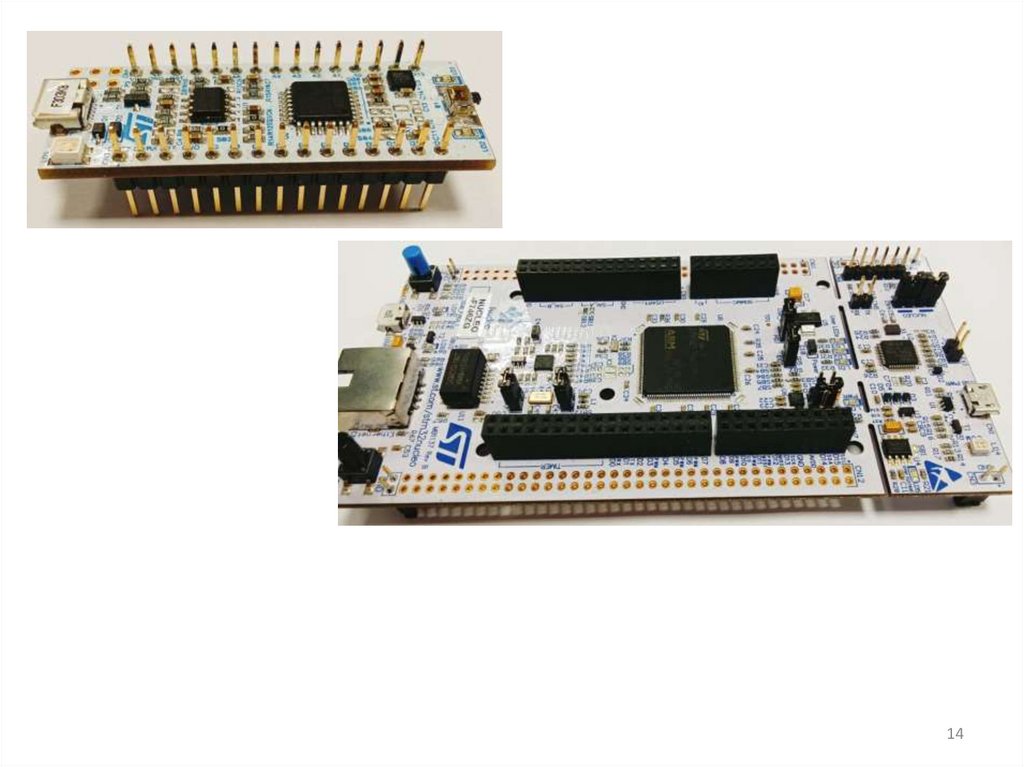
1314.
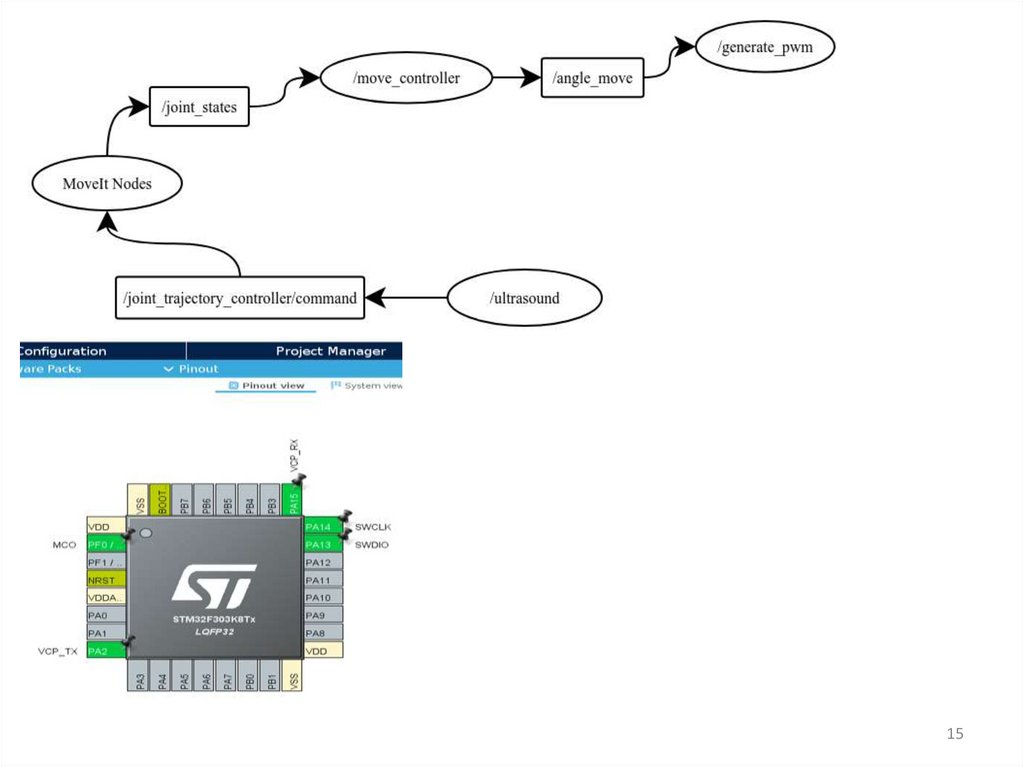
1415.
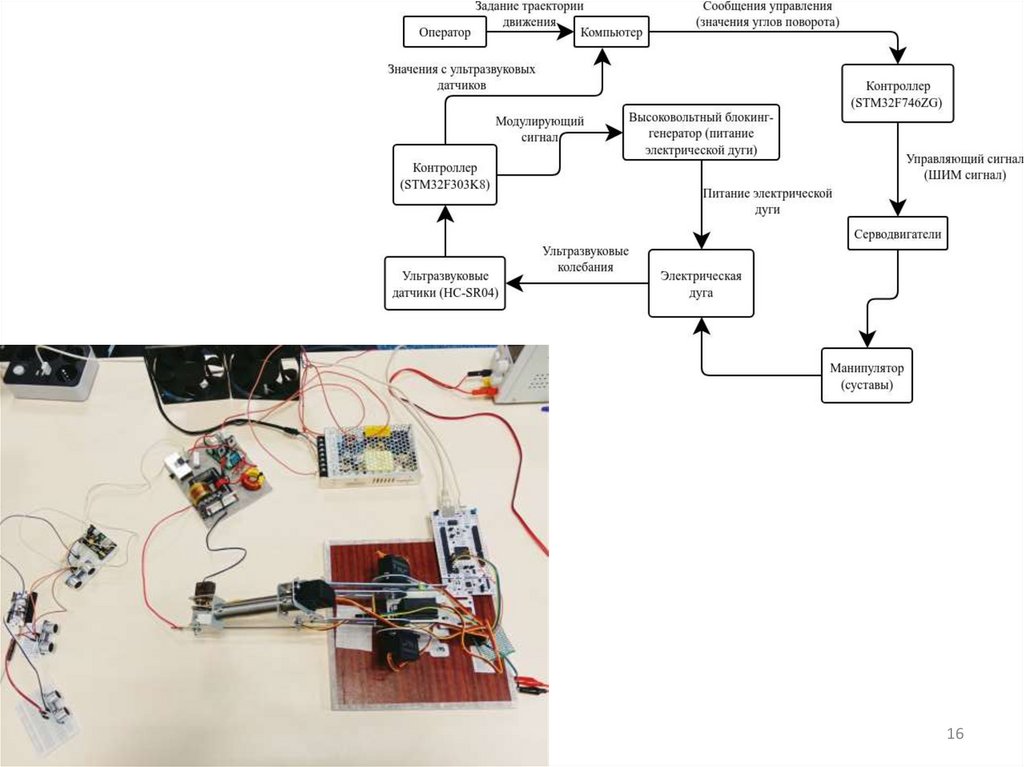
1516.
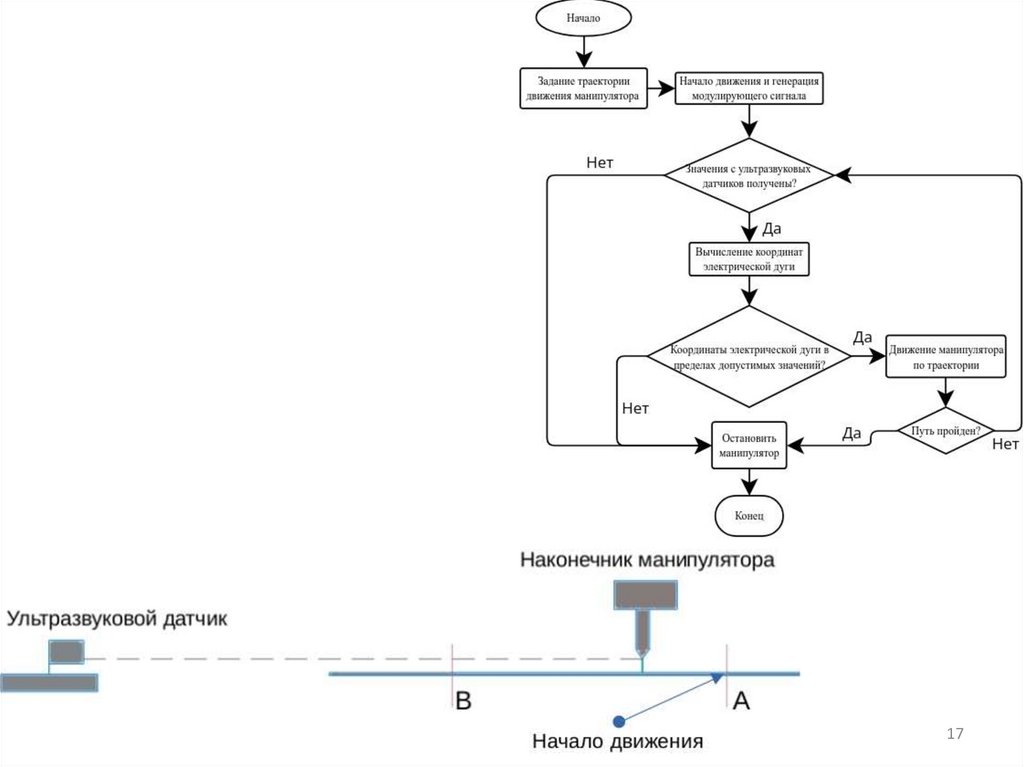
1617.
1718.
1819.
1920.
2021.
2122.
Выводы:1. RU 2760143C1 «Способ регулирования сварочной дуги в процессе
автоматизированной сварки или
наплавки с использованием сварочного манипулятора»
2. RU 2786254C1 «Способ сварки, наплавки или резки с использованием
роботизированного
манипулятора»
22
23.
«Спасибо за внимание!»23