






























 Биология
БиологияПохожие презентации:










Основы биомеханики
1.
Основы биомеханикиТюменский колледж производственных и социальных технологий, 2021 г.
2. Основные принципы биомеханики
1. Движение в суставах определены их формой2. Усилие мышечного сокращения направлено:
а) вдоль мышцы
б) перпендикулярно к оси сустава
в) к неподвижной точке на кости (punctum fixum)
3. Кости, суставы и мышцы образуют рычаги
двигательного аппарата. Весь суставной аппарат
рассматривается как система рычагов.
Тюменский колледж производственных и социальных технологий, 2021 г.
3. РЫЧАГ
ТоFd
Ft
То – точка опоры или
точка вращения
Fd - точка приложения
действующей
(движущей) силы или
сила мышечного
сокращения
Ft - точка приложения
противодействующей
силы или силы
тяжести
Тюменский колледж производственных и социальных технологий, 2021 г.
4. Плечо силы
Плечо силы – этократчайшее
расстояние от точки
опоры до линии
действия силы:
LFd – плечо
действующей силы
LFt – плечо противодействующей силы
Тюменский колледж производственных и социальных технологий, 2021 г.
5.
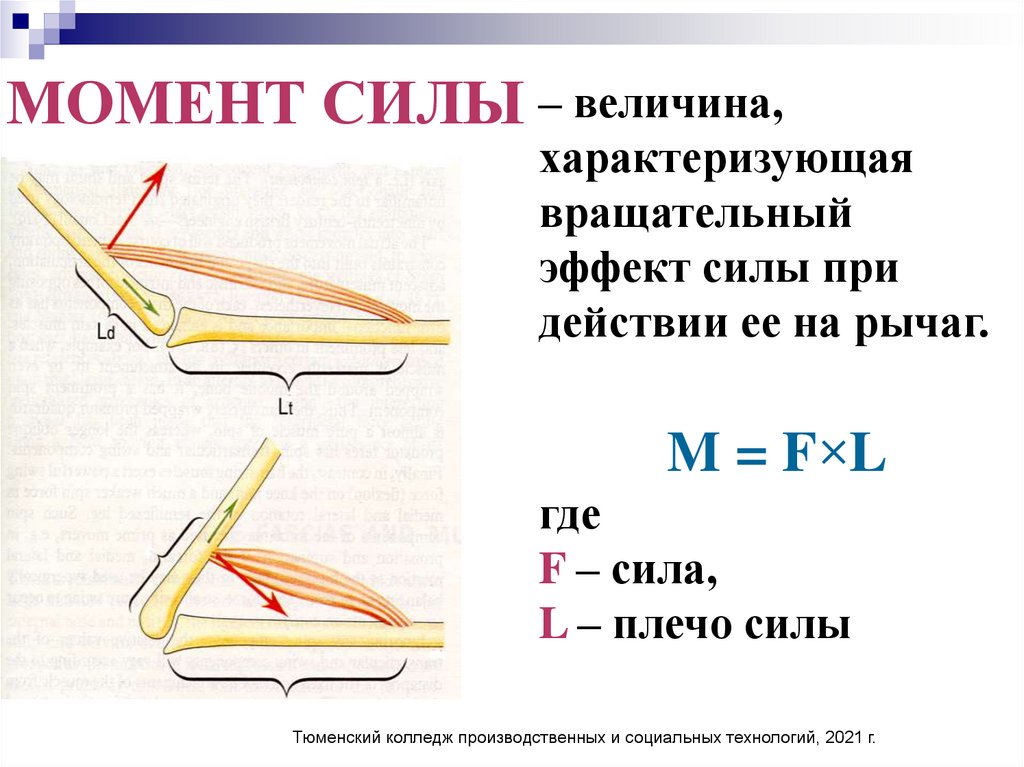
МОМЕНТ СИЛЫ – величина,характеризующая
вращательный
эффект силы при
действии ее на рычаг.
M = F×L
где
F – сила,
L – плечо силы
Тюменский колледж производственных и социальных технологий, 2021 г.
6. Свойства рычага
Условие равновесия рычага:Σ М = О или MFt = MFd
При движении:
это равенство нарушается и рычаг
вращается в направлении той силы, момент
которой больше
чем больше момент силы, тем больше
эффект действия мышцы
Тюменский колледж производственных и социальных технологий, 2021 г.
7. Виды рычагов
РЫЧАГ 1 РОДА= РАВНОВЕСИЯДвуплечий
(точки приложения сил располагаются по разные
стороны от точки опоры)
Тюменский колледж
производственных и социальных
технологий, 2021 г.
7
8. Виды рычагов
РЫЧАГИ 2 РОДАОдноплечие
(точки приложения сил располагаются по одну
сторону от точки опоры)
РЫЧАГ
РЫЧАГ СИЛЫ
СКОРОСТИ =
ЛОВКОСТИ
Тюменский колледж
производственных и социальных
технологий, 2021 г.
9.
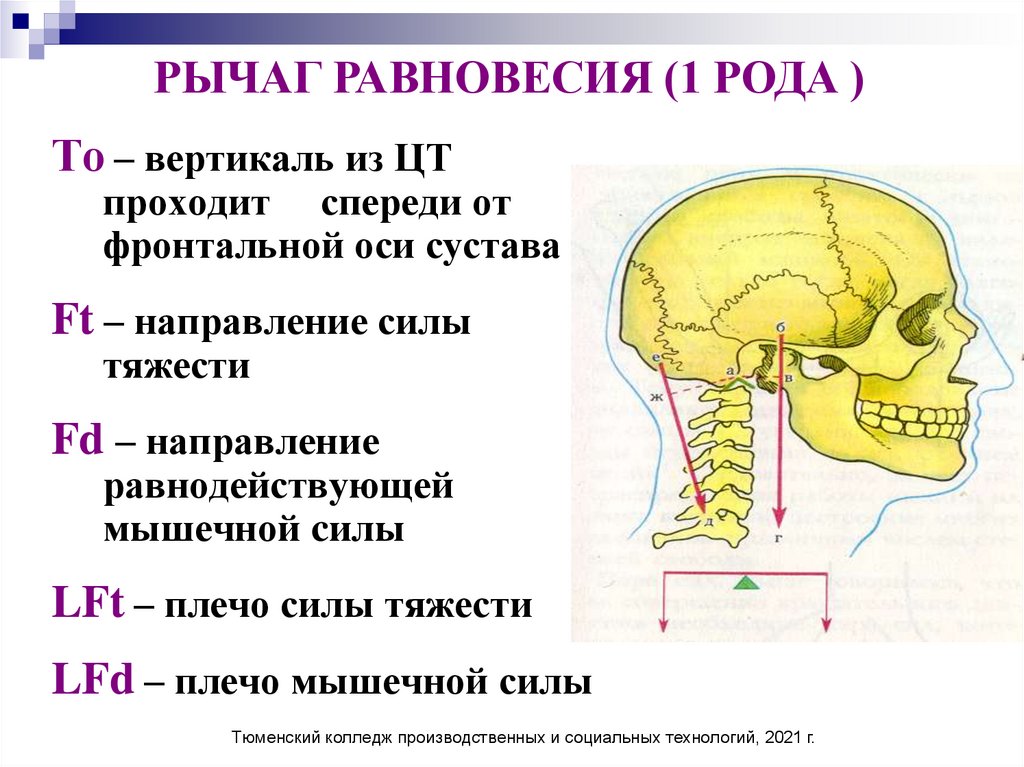
РЫЧАГ РАВНОВЕСИЯ (1 РОДА )То – вертикаль из ЦТ
проходит спереди от
фронтальной оси сустава
Ft – направление силы
тяжести
Fd – направление
равнодействующей
мышечной cилы
LFt – плечо силы тяжести
LFd – плечо мышечной силы
Тюменский колледж производственных и социальных технологий, 2021 г.
10.
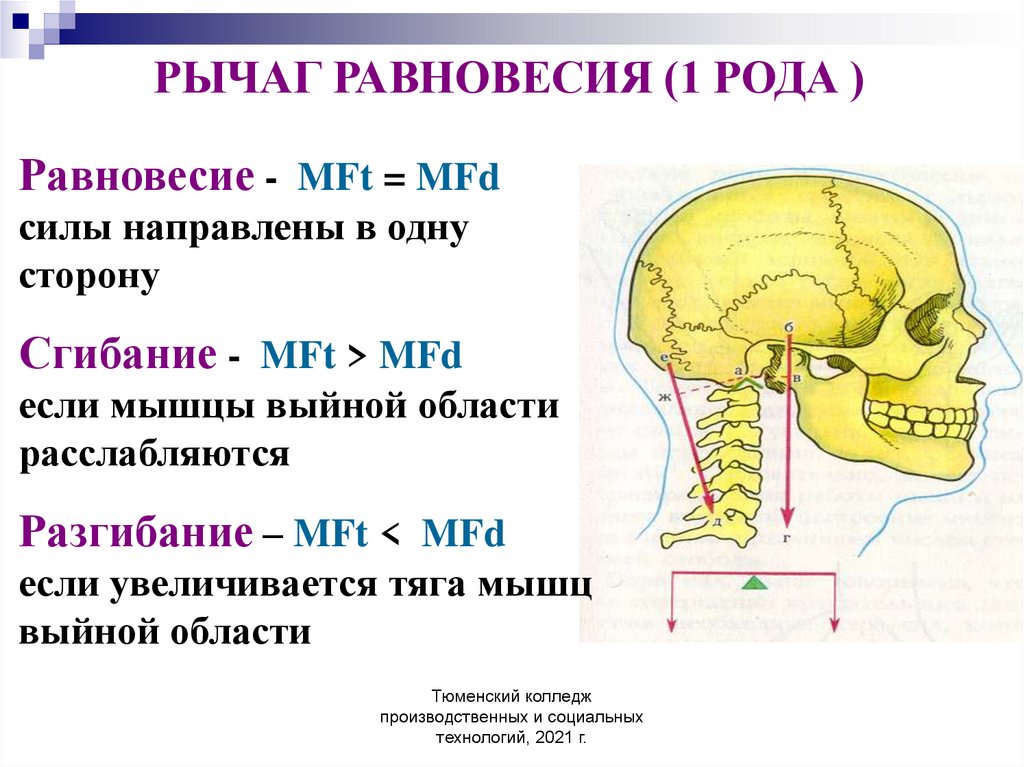
РЫЧАГ РАВНОВЕСИЯ (1 РОДА )Равновесие - MFt = MFd
силы направлены в одну
сторону
Сгибание - MFt > MFd
если мышцы выйной области
расслабляются
Разгибание – MFt < MFd
если увеличивается тяга мышц
выйной области
Тюменский колледж
производственных и социальных
технологий, 2021 г.
11.
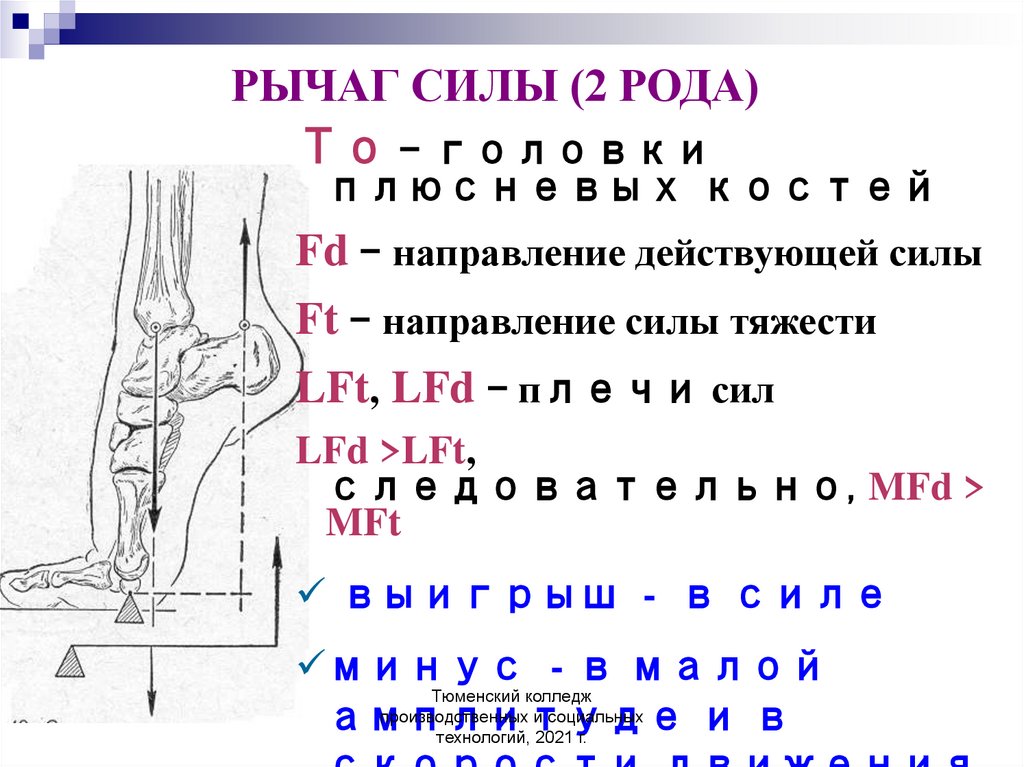
РЫЧАГ СИЛЫ (2 РОДА)То – головки
плюсневых костей
Fd – направление действующей силы
Ft – направление силы тяжести
LFt, LFd – плечи сил
LFd >LFt,
следовательно, MFd >
MFt
выигрыш - в силе
минус - в малой
Тюменский колледж
производственных
и социальных
амплитуде
ив
технологий, 2021 г.
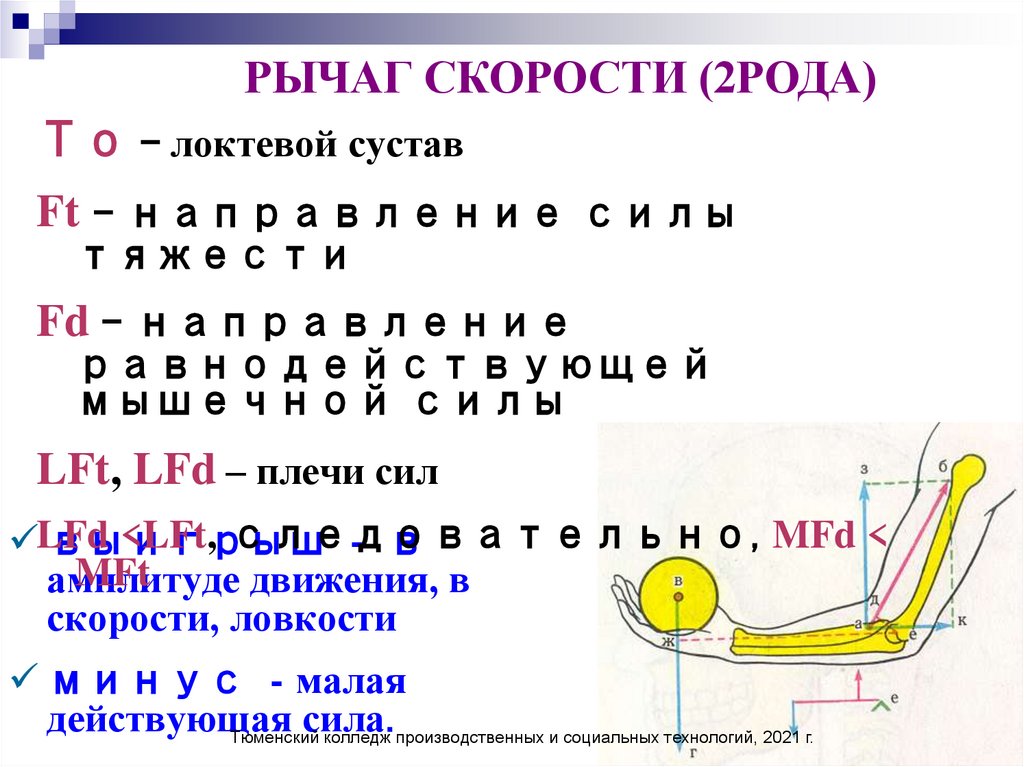
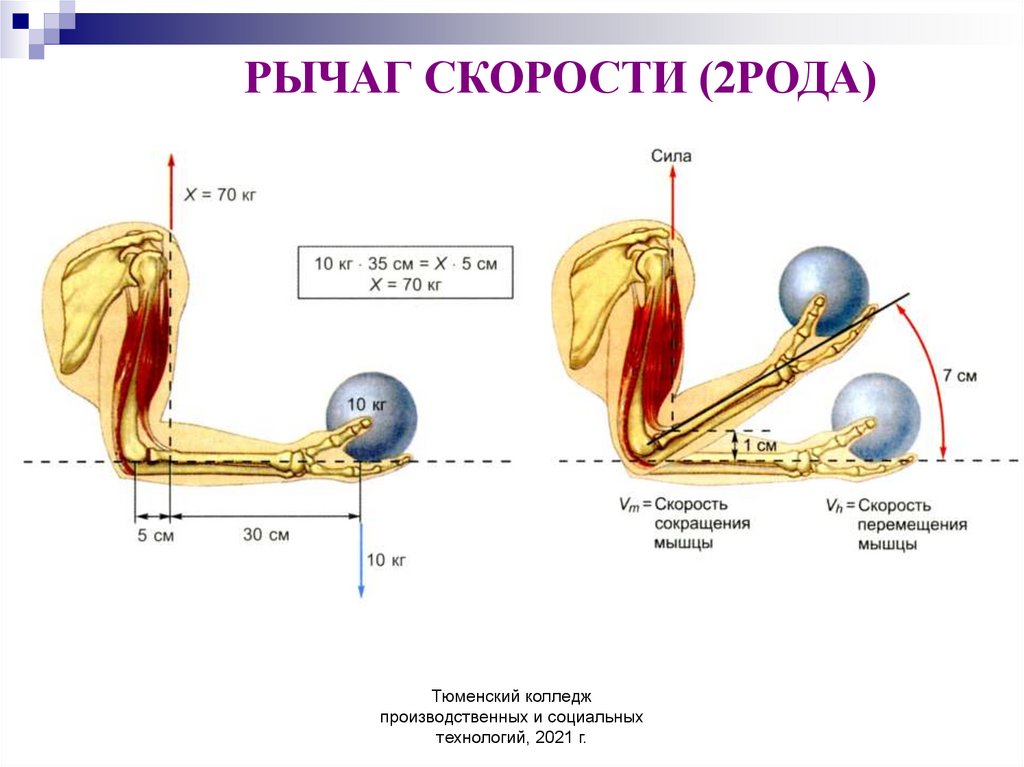
12.
РЫЧАГ СКОРОСТИ (2РОДА)То – локтевой сустав
Ft – направление силы
тяжести
Fd – направление
равнодействующей
мышечной силы
LFt, LFd – плечи сил
<LFt, следовательно,
MFd <
LFd
выигрыш
- в
MFt
амплитуде
движения, в
скорости, ловкости
минус - малая
действующая
сила.
Тюменский колледж производственных и социальных технологий, 2021 г.
13.
РЫЧАГ СКОРОСТИ (2РОДА)Тюменский колледж
производственных и социальных
технологий, 2021 г.
14. ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
1. Физиологический поперечник – сумма площадейпоперечных сечений всех мышечных волокон,
входящих в состав мышцы.
Анатомический поперечник – площадь поперечного
сечения мышцы перпендикулярно ее длине в
наиболее широкой части.
Веретенообразные
мышцы –
динамическая
нагрузка
Перистые
мышцы –
статическая
нагрузка
Тюменский колледж
производственных и социальных
технологий, 2021 г.
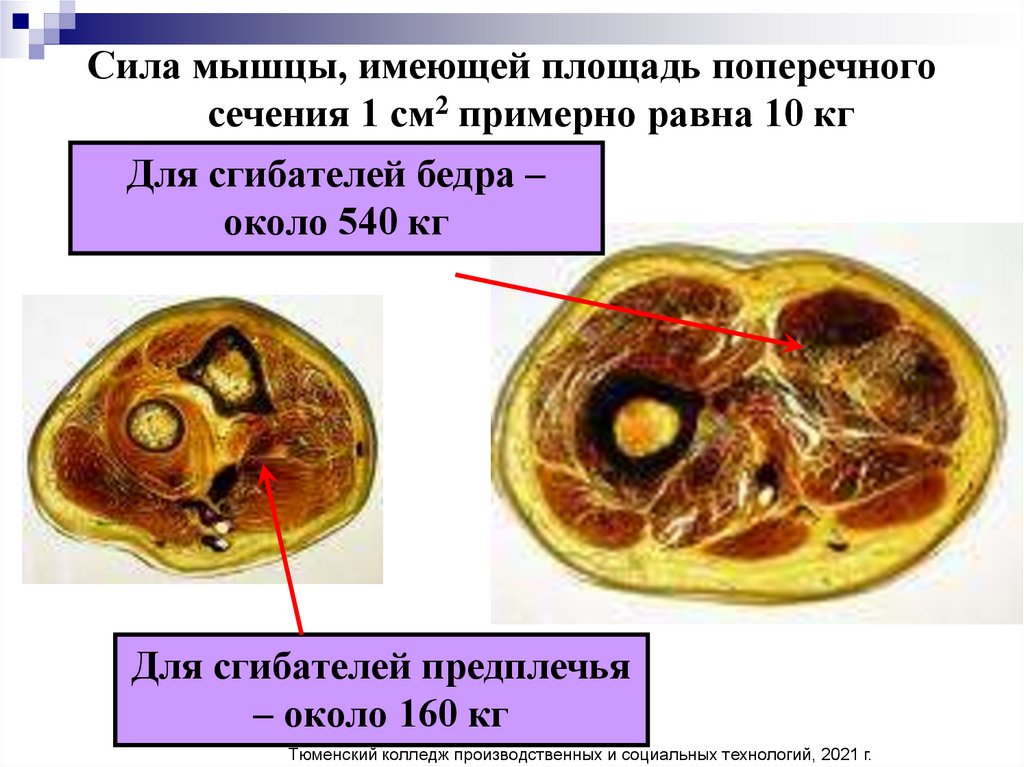
15.
Сила мышцы, имеющей площадь поперечногосечения 1 см2 примерно равна 10 кг
Для сгибателей бедра –
около 540 кг
Для сгибателей предплечья
– около 160 кг
Тюменский колледж производственных и социальных технологий, 2021 г.
16.
Для жевательных мышц, поднимающих нижнюючелюсть – 390-400 кг. Площадь поперечного сечения
трех пар мышц составляет в сумме 39 см2.
Жевательная мышца – 7,5 см2
Височная мышца – 8 см2
Медиальная крыловидная
мышца – 4 см2
Тюменский колледж
производственных и социальных
технологий, 2021 г.
17.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
2. Количество моторных единиц, участвующих в
сокращении.
Для включения большого количества моторных
единиц необходимы следующие условия:
замах
при этом мышца растягивается,
следовательно,
раздражается
больше нервных волокон и
больше
моторных
единиц
«включается» в сокращение
Тюменский колледж
производственных и социальных
технологий, 2021 г.
18.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
2. Количество моторных единиц, участвующих в
сокращении.
Для включения большого количества моторных
единиц необходимы следующие условия:
состояние нервной системы
настрой
Тюменский колледж
производственных и социальных
технологий, 2021 г.
19.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
2. Количество моторных единиц, участвующих в
сокращении.
Для включения большого количества моторных
единиц необходимы следующие условия:
состояние нервной системы
чрезмерное возбуждение
Тюменский колледж
производственных и социальных
технологий, 2021 г.
20.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
3.Состав мышечных волокон
В одной моторной единице содержится один вид
мышечных волокон.
Стайер – преобладают
красные мышечные
волокна – статическая
работа
Спринтер - преобладают
белые мышечные
волокна – динамическая
работа
Тюменский колледж
производственных и социальных
технологий, 2021 г.
21.
У девятикратного олимпийского чемпиона КарлаЛьюиса в мышцах ног белых волокон было более
70%. Поэтому в беге на короткие дистанции он
развивал скорость – 45 км/ч.
Тюменский колледж производственных и социальных технологий, 2021 г.
22.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
4. Величина плеча действующей силы
Чем меньше LFd, тем большую силу нужно
приложить для оптимального момента вращения
(M=FxL)
Тюменский колледж
производственных и социальных
технологий, 2021 г.
23.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
5. Угол прикрепления мышцы
Оптимально при 90º
Тюменский колледж
производственных и социальных
технологий, 2021 г.
24. Функциональные группы мышц
АГОНИСТЫ – одна или несколько мышц в каждойфункциональной мышечной группе выполняют
основную функцию
Тюменский колледж
производственных и социальных
технологий, 2021 г.
25.
Функциональные группы мышцСИНЕPГИСТЫ мышцы одного сустава,
которые осуществляют
функцию в одном
направлении
Тюменский колледж
производственных и социальных
технологий, 2021 г.
26.
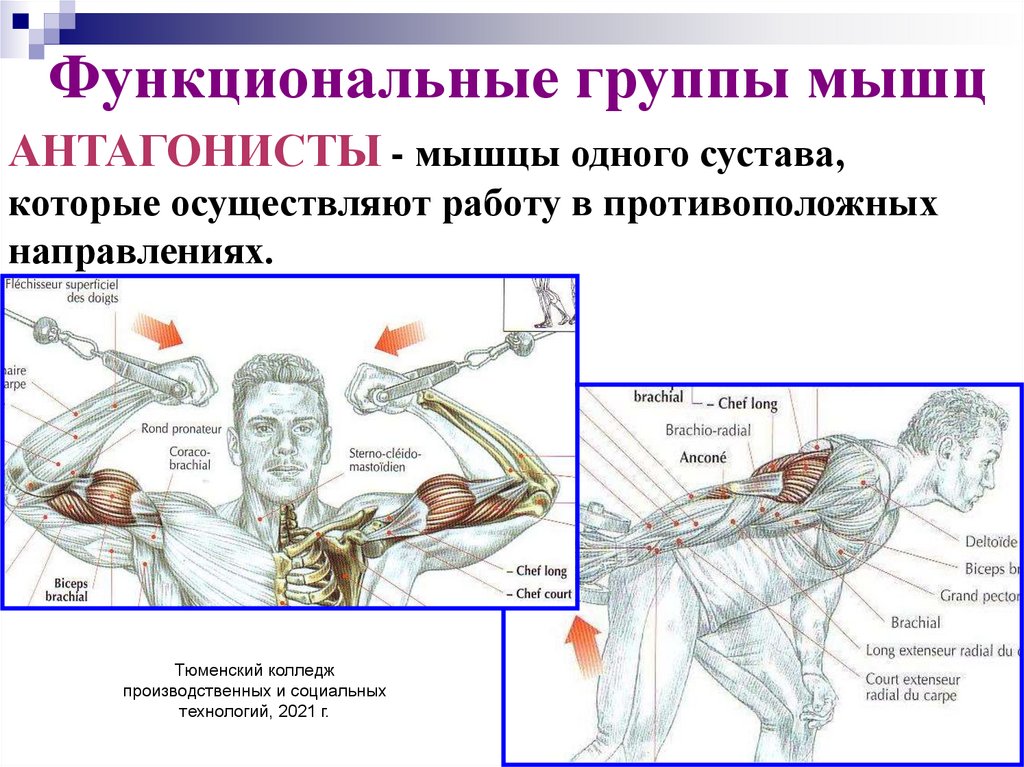
Функциональные группы мышцАНТАГОНИСТЫ - мышцы одного сустава,
которые осуществляют работу в противоположных
направлениях.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
27.
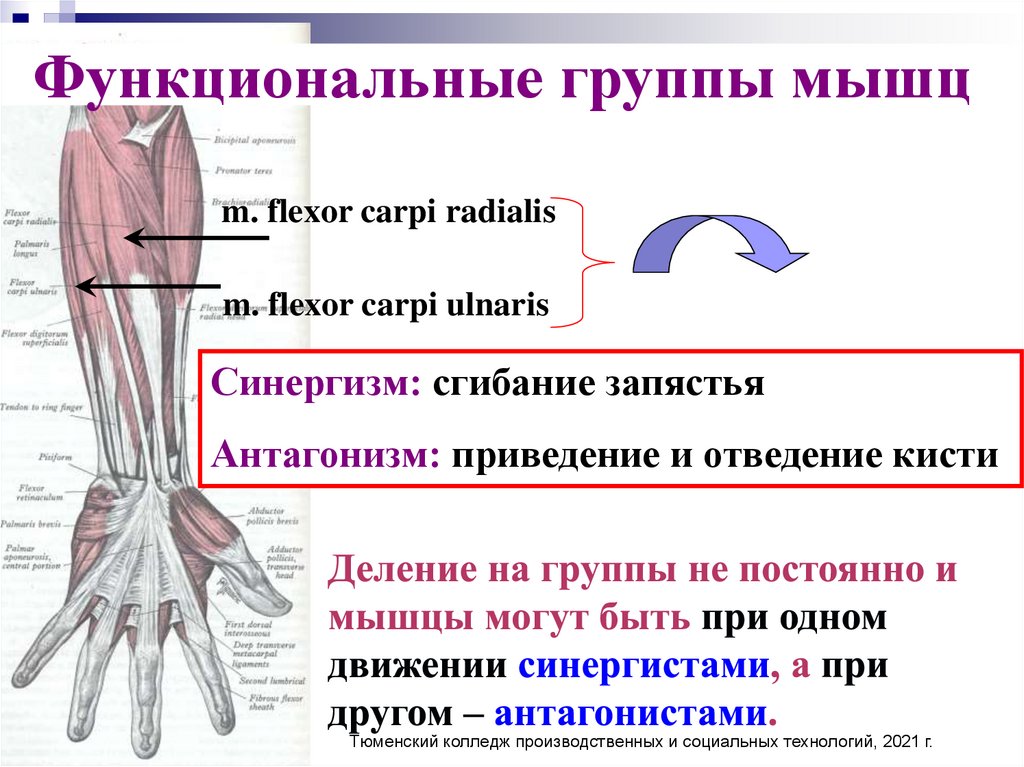
Функциональные группы мышцm. flexor carpi radialis
m. flexor carpi ulnaris
Синергизм: сгибание запястья
Антагонизм: приведение и отведение кисти
Тюменский колледж производственных и социальных технологий, 2021 г.
28.
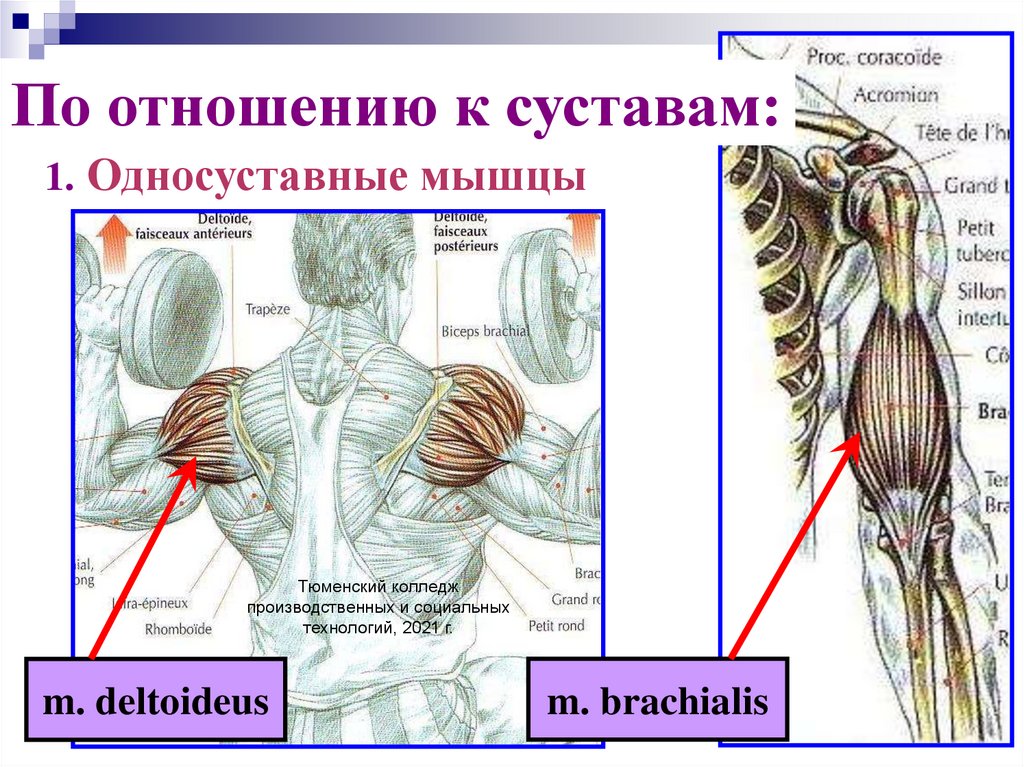
По отношению к суставам:1. Односуставные мышцы
Тюменский колледж
производственных и социальных
технологий, 2021 г.
m. deltoideus
m. brachialis
29.
Тюменский колледжпроизводственных и социальных
технологий, 2021 г.
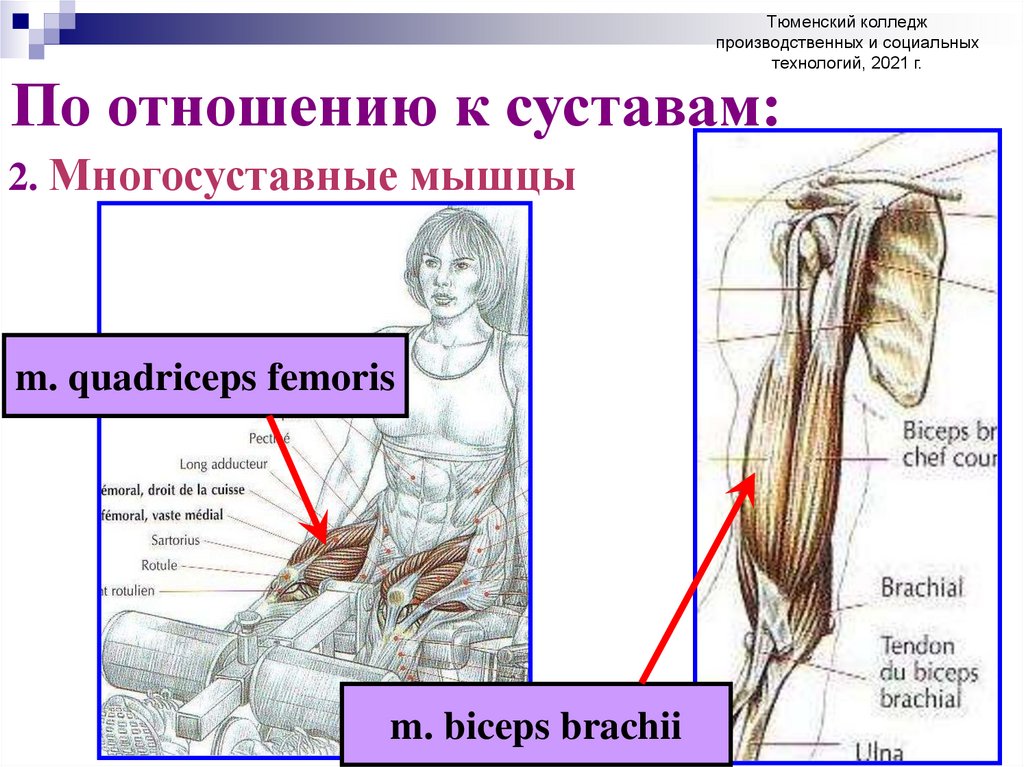
По отношению к суставам:
2. Многосуставные мышцы
m. quadriceps femoris
m. biceps brachii
30.
Пассивная мышечнаянедостаточность
неспособность мышц
выполнять движения по
причине предельно
растянувшихся мышц
антагонистов
Тюменский колледж
производственных и социальных
технологий, 2021 г.
31.
Активная мышечная недостаточностьмногосуставная мышца не может произвести
движение в полном объеме во всех суставах (т.к.
длина мышцы недостаточна для удержания или
Тюменский колледж
выполнения движения).
производственных и социальных
технологий, 2021 г.
32. Мышечная координация движений
В каждом движении участвуют несколько мышц,являющихся синергистами и антагонистами.
Во время сокращений синергистов
рефлекторное торможение антагонистов.
наступает
Слабое противодействие мышц антагонистов
позволяет совершать плавные движения.
Работа
многосуставных
мышц
обеспечивает
координацию движений с экономией мышечной
Тюменский колледж
энергии.
производственных и социальных
технологий, 2021 г.
33. Виды работы мышц
Уступающая(динамическая с отрицательным эффектом)
мышца, оставаясь напряженной, постепенно
расслабляется, уступая действию силы тяжести либо
действию того или иного сопротивления.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
34.
Виды работы мышцПреодолевающая
(динамическая с положительным
эффектом)
при которой мышца
преодолевает тяжесть
данного звена тела либо
то или иное
сопротивление и
производит работу
Тюменский колледж
производственных и социальных
технологий, 2021 г.
35.
Виды работы мышцУдерживающая
(статическая)
происходит
уравновешивание действия
сопротивления, в
результате чего движение
отсутствует
Тюменский колледж
производственных и социальных
технологий, 2021 г.
36.
Кинематические цепиЛюбое тело свободно перемещается в пространстве,
обладает шестью степенями свободы:
1. вверх и вниз
2. вперед и назад
3. вправо и влево
Если тело закреплено в одной точке, то оно не может
совершать поступательного движения, но может вращаться
относительно 3-х осей, т.е. имеет три степени свободы.
Если тело закреплено в двух точках, то оно имеет
одну степень свободы и может вращаться вокруг одной оси.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
37.
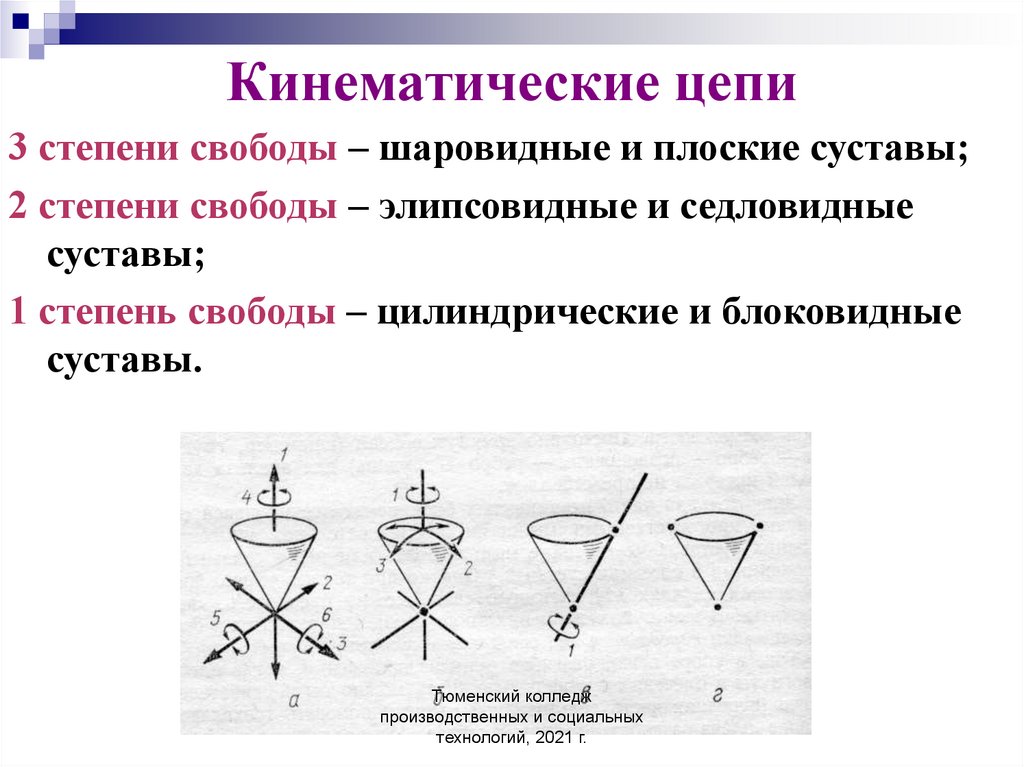
Кинематические цепи3 степени свободы – шаровидные и плоские суставы;
2 степени свободы – элипсовидные и седловидные
суставы;
1 степень свободы – цилиндрические и блоковидные
суставы.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
38.
Тюменский колледжпроизводственных и социальных
технологий, 2021 г.
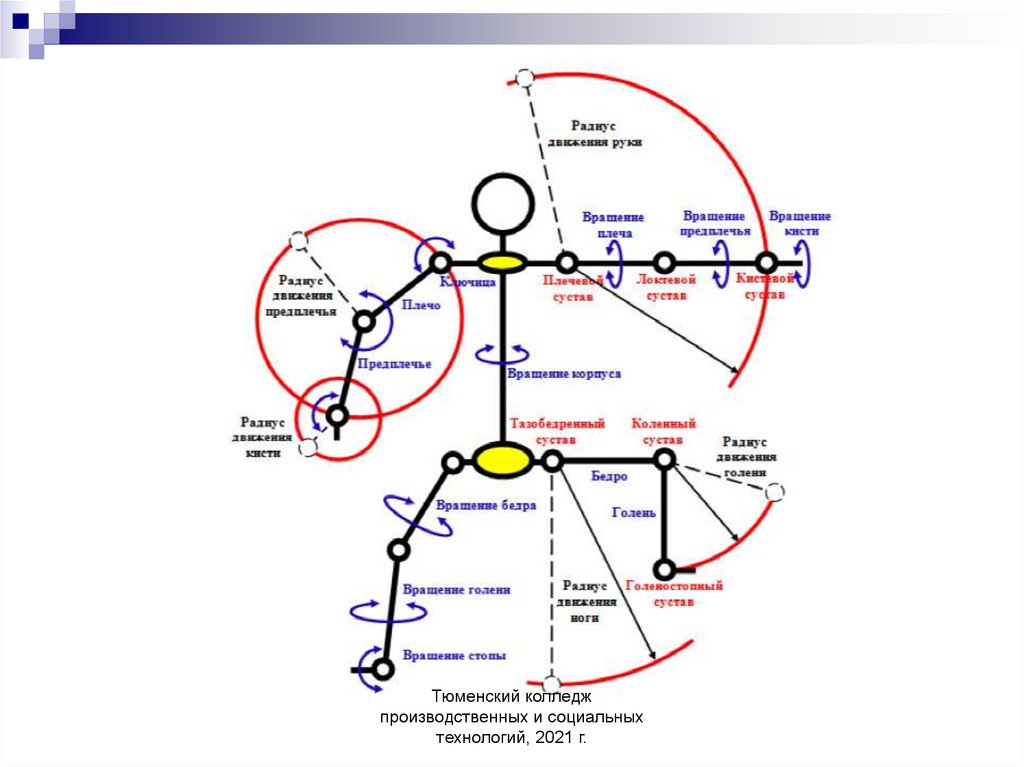
39. Кинематические цепи
Все звенья опорнодвигательного аппаратасгруппированы в систему
кинематических цепей
Звенья в этих цепях – это
элементарные рычаги
(равновесия, силы, скорости)
Выделяют два вида
кинематических цепей:
ОТКPЫТЫЕ (ОКЦ) и
ЗАКPЫТЫЕ (ЗКЦ).
Тюменский колледж
производственных и социальных
технологий, 2021 г.
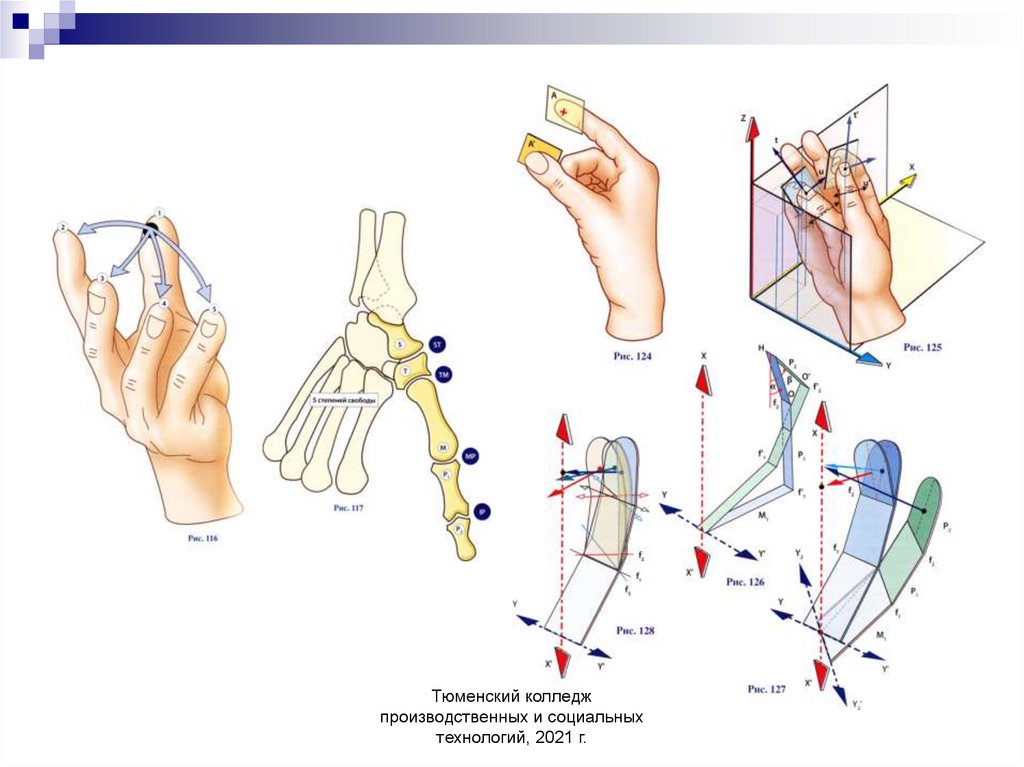
40. Открытая кинематическая цепь
Это цепь из рычагов, дистальное звено которойсвободное (верхняя конечность)
Большая степень свободы
3
1
1
1 1 3 2
кисть
Возможность изолированных
движений в отдельных звеньях
(суставах) ОКЦ
ОКЦ может стать ЗКЦ если
конечное звено цепи получит связь
с опорой (или захват)
Тюменский колледж
производственных и социальных
технологий, 2021 г.
3+1+1+2=7 – степеней свободы у кисти
3+1+1+2+3+1+1=12 - степеней свободы у пальцев
41.
Тюменский колледжпроизводственных и социальных
технологий, 2021 г.
42. Закрытая кинематическая цепь
Невозможны изолированныедвижения в одном суставе
Изменение положения в одном
суставе приводит к изменению
положения в трех суставах
При сокращении хотя бы
одной мышцы ЗКЦ,
происходит движение всех
звеньев кинематической цепи
ЗКЦ может разомкнуться
Тюменский колледж
производственных и социальных
технологий, 2021 г.
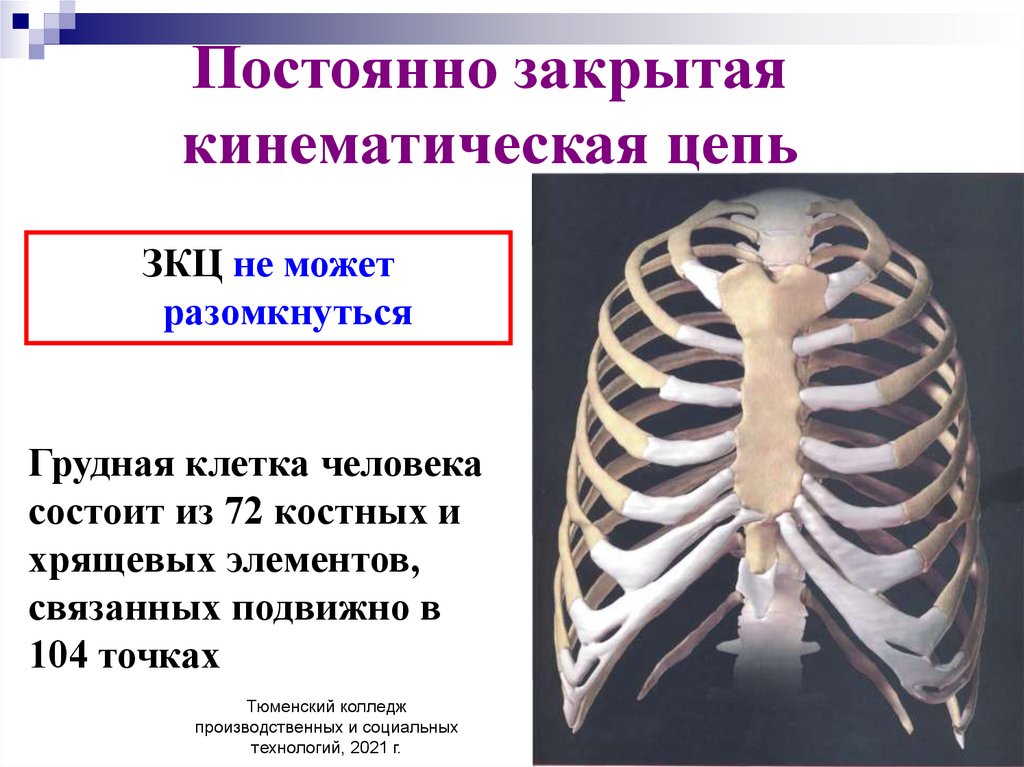
43.
Постоянно закрытаякинематическая цепь
ЗКЦ не может
разомкнуться
Грудная клетка человека
состоит из 72 костных и
хрящевых элементов,
связанных подвижно в
104 точках
Тюменский колледж
производственных и социальных
технологий, 2021 г.
44.
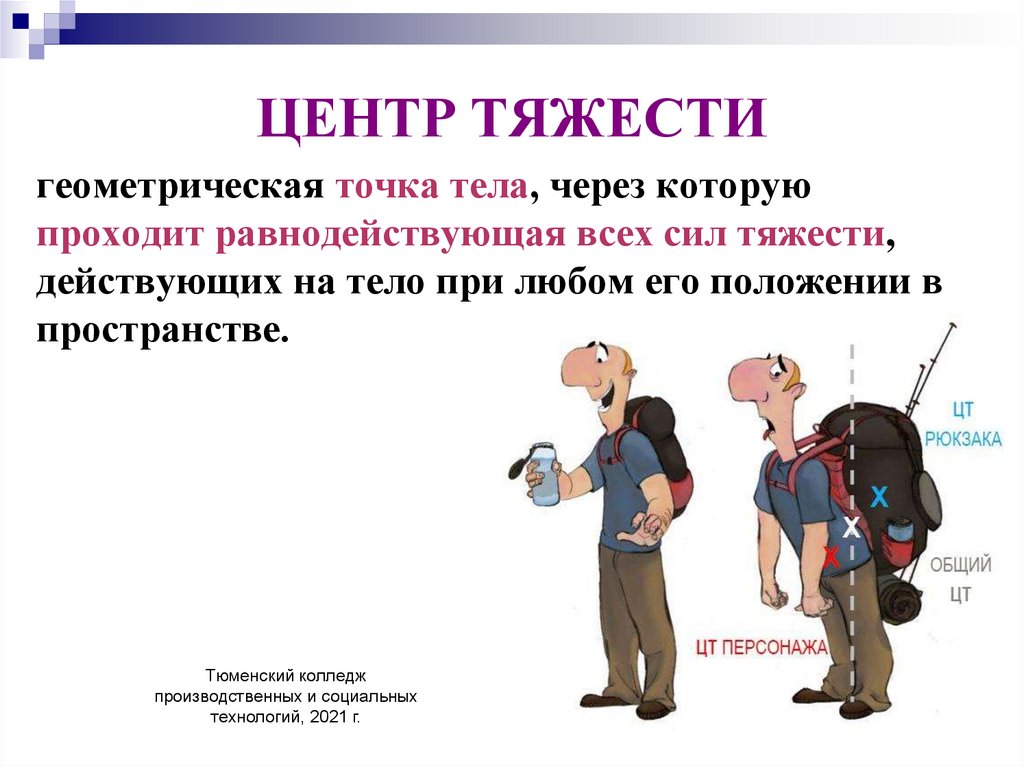
ЦЕНТР ТЯЖЕСТИгеометрическая точка тела, через которую
проходит равнодействующая всех сил тяжести,
действующих на тело при любом его положении в
пространстве.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
45. Расположение ОЦТ определяют:
1. Возраст:новорожденные – Th5-6
2 года – L1
5 лет - L3
Тюменский колледж
производственных и социальных
технологий, 2021 г.
46.
Расположение ОЦТ определяют:2. Пол
женщины –
S1 (L5 – Co1).
Тюменский колледж
производственных и социальных
технологий, 2021 г.
мужчины –
L5 (L3-S5);
47.
Расположение ОЦТ определяют:3. Конституция,
физическое развитие.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
48.
Расположение ОЦТ определяют:4. Положение тела
Тюменский колледж
производственных и социальных
технологий, 2021 г.
49.
Расположение ОЦТ определяют:5. Фазы дыхания, перистальтика кишечника
Тюменский колледж
производственных и социальных
технологий, 2021 г.
50. Виды равновесия тела
ПЛОЩАДЬ ОПОРЫ – площадьопорных поверхностей и
пространства между ними
1. Устойчивое
ОЦТ ниже площади опоры
Если тело вывести из
равновесия, оно под действием
силы тяжести вернется в
исходное положение
Тюменский колледж
производственных и социальных
технологий, 2021 г.
51.
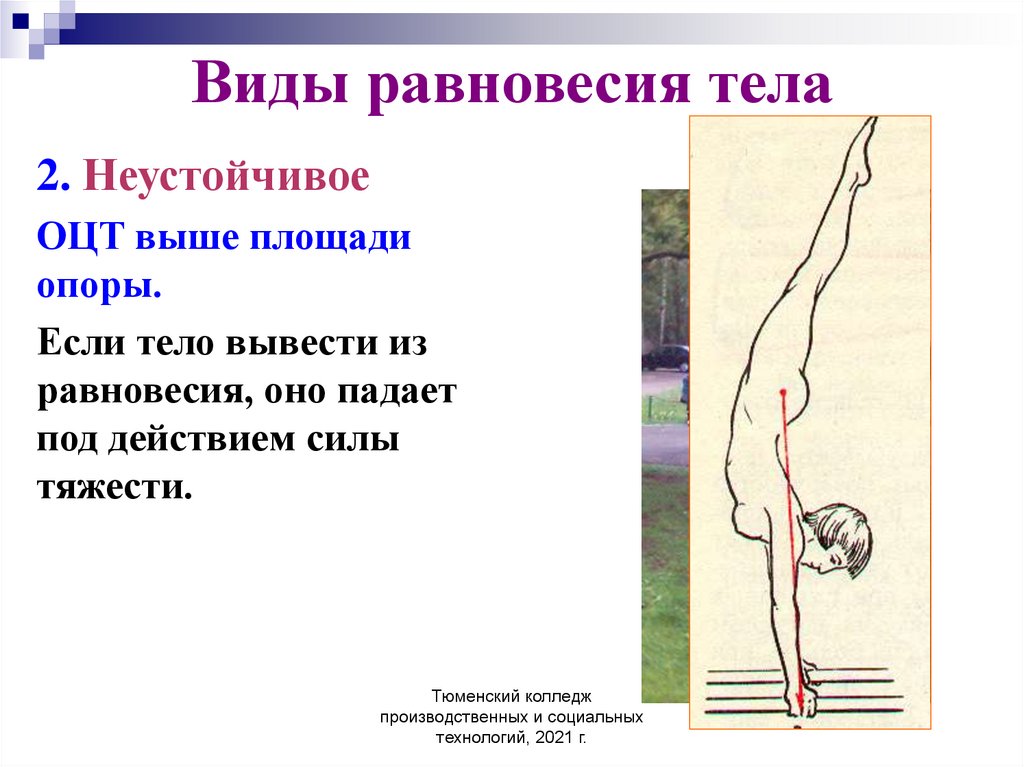
Виды равновесия тела2. Неустойчивое
ОЦТ выше площади
опоры.
Если тело вывести из
равновесия, оно падает
под действием силы
тяжести.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
52. Условия устойчивости тела
1. Достаточная площадь опорыТюменский колледж
производственных и социальных
технологий, 2021 г.
53.
Условия устойчивости тела2. Высота расположения ОЦТ
чем ниже, тем больше устойчивость
Тюменский колледж
производственных и социальных
технологий, 2021 г.
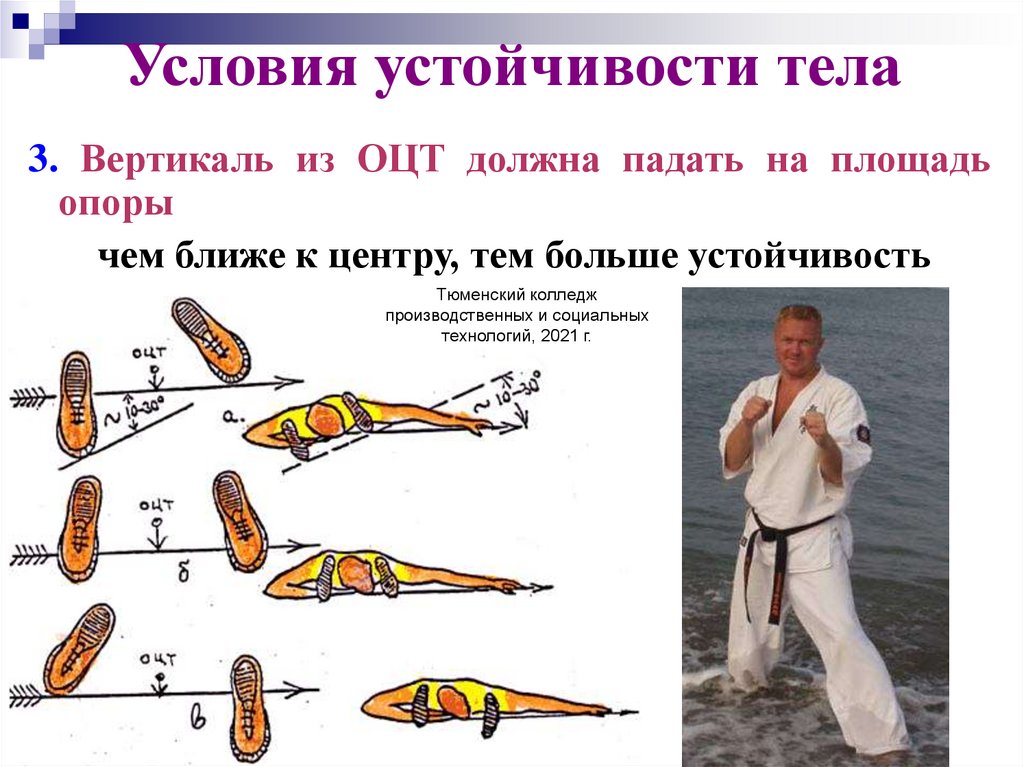
54.
Условия устойчивости тела3. Вертикаль из ОЦТ должна падать на площадь
опоры
чем ближе к центру, тем больше устойчивость
Тюменский колледж
производственных и социальных
технологий, 2021 г.
55.
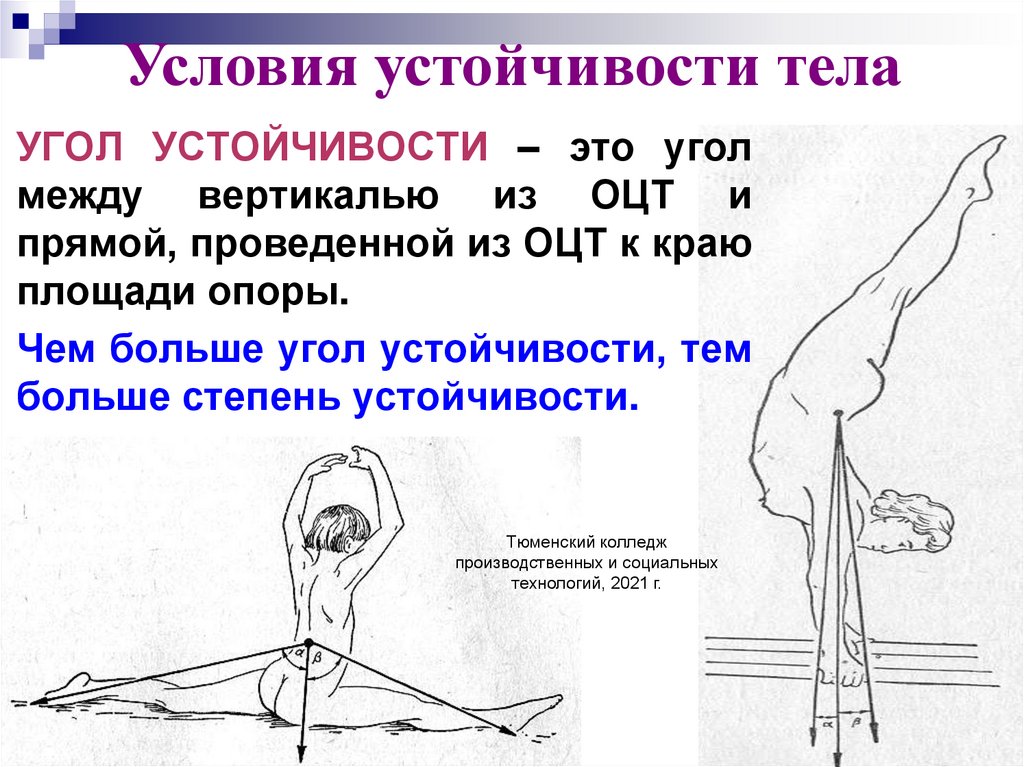
Условия устойчивости телаУГОЛ УСТОЙЧИВОСТИ – это угол
между вертикалью из ОЦТ и
прямой, проведенной из ОЦТ к краю
площади опоры.
Чем больше угол устойчивости, тем
больше степень устойчивости.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
56.
ОСАНКАОсанка – привычная поза непринужденно, стоящего
человека. Держит прямо голову и туловище без
активного напряжения мышц.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
57.
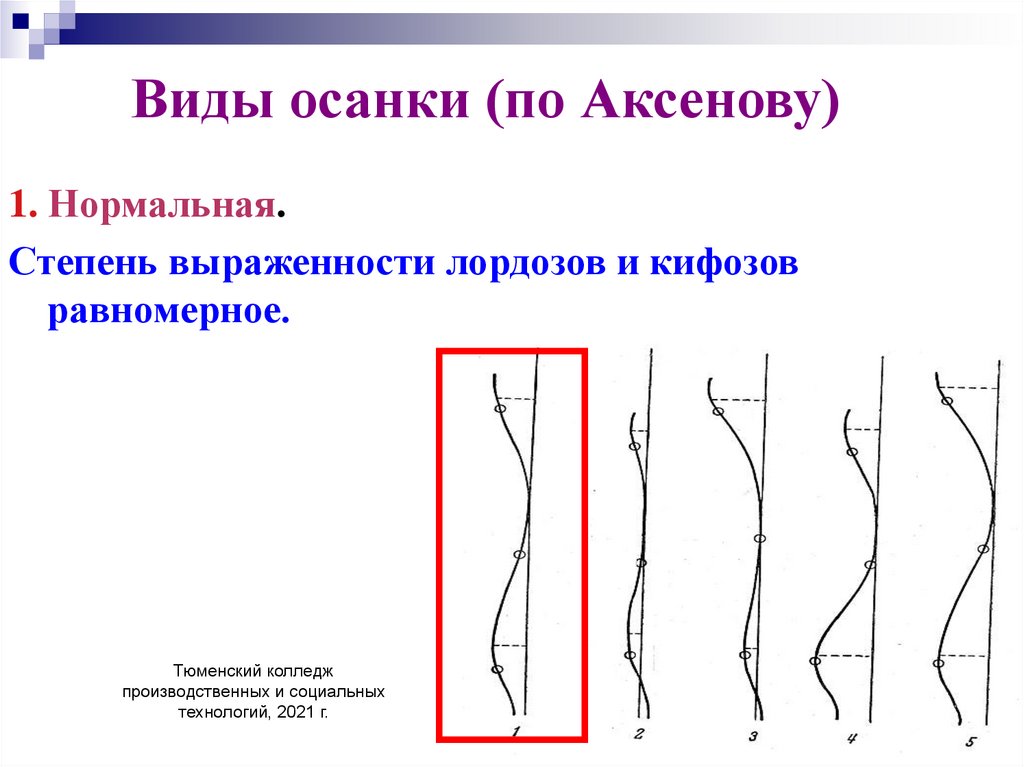
Виды осанки (по Аксенову)1. Нормальная.
Степень выраженности лордозов и кифозов
равномерное.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
58.
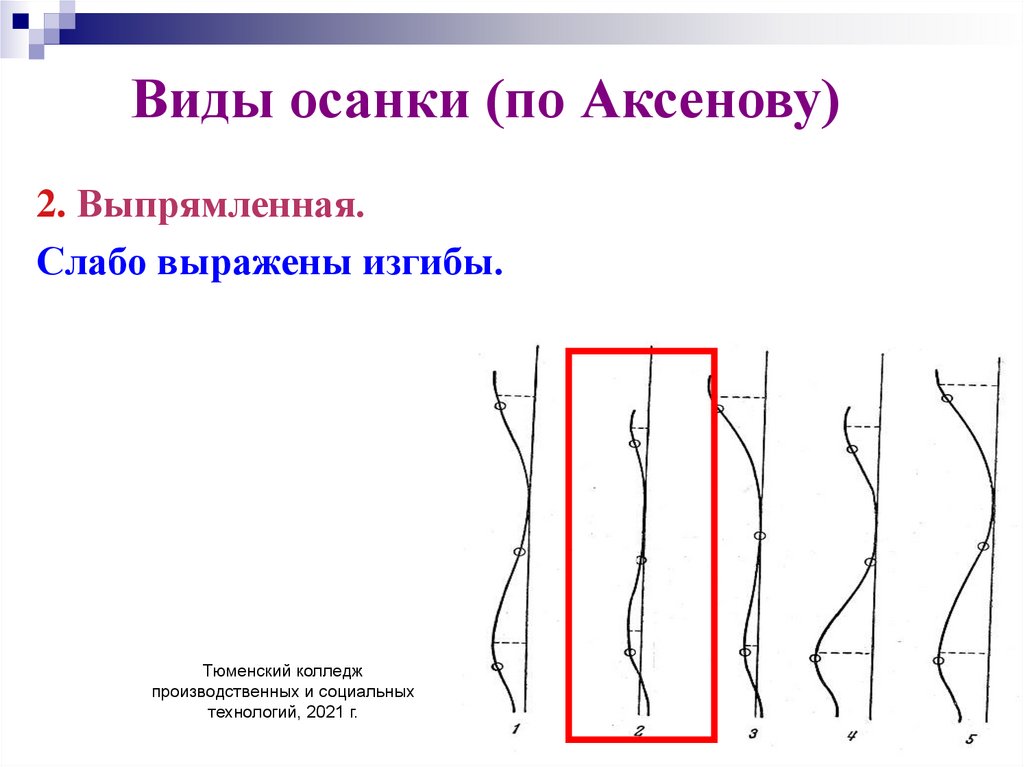
Виды осанки (по Аксенову)2. Выпрямленная.
Слабо выражены изгибы.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
59.
Виды осанки (по Аксенову)3. Сутуловатая.
Большой шейный лордоз, маленький грудной кифоз
Тюменский колледж
производственных и социальных
технологий, 2021 г.
60.
Виды осанки (по Аксенову)4. Лордотическая.
Чрезвычайно развит поясничный лордоз.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
61.
Виды осанки (по Аксенову)5. Кифотическая.
Особенно сильно развит грудной кифоз.
Тюменский колледж
производственных и социальных
технологий, 2021 г.
62.
Благодарю за внимание!!!Тюменский колледж
производственных и социальных
технологий, 2021 г.