





















 Физика
ФизикаПохожие презентации:










Динамика вращательного движения твердого тела
1. ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
1. Динамика вращательного движения твердоготела относительно точки.
2. Динамика вращательного движения твердого
тела относительно оси.
3. Расчет моментов инерции некоторых простых
тел. Теорема Штейнера.
4. Кинетическая энергия вращающегося тела.
5. Закон сохранения момента импульса.
6. Законы сохранения и их связь с симметрией
пространства и времени.
7. Сходство и различие линейных и угловых
характеристик движения.
2. 1. Динамика вращательного движения твердого тела относительно точки
rРассмотрим твердое тело, как некую систему (рис.),
состоящую из n точек (m1 m2 … mn);
– радиус-вектор i-ой
i
точки, проведенный из точки О – центра неподвижной
инерциальной системы отсчета.
F – внешняя сила, действующая на i-ю точку,
Обозначим
i
F–ik сила действия со стороны k-ой точки на i-ю.
3.
Запишемточки:
основное
уравнение
динамики
d
m F F .
dt
n
i
i
k 1
k i
ik
i
для
4.
Умножим обе части векторно на rd
r
,
m
r
,
F
r
,
F
.
dt
i
i
i
i
i
k
ik
i
i
Знак производной можно вынести за знак
векторного произведения (и знак суммы тоже),
тогда:
d
r , m r , F r , F .
dt
i
i
i
k
i
ik
i
i
5.
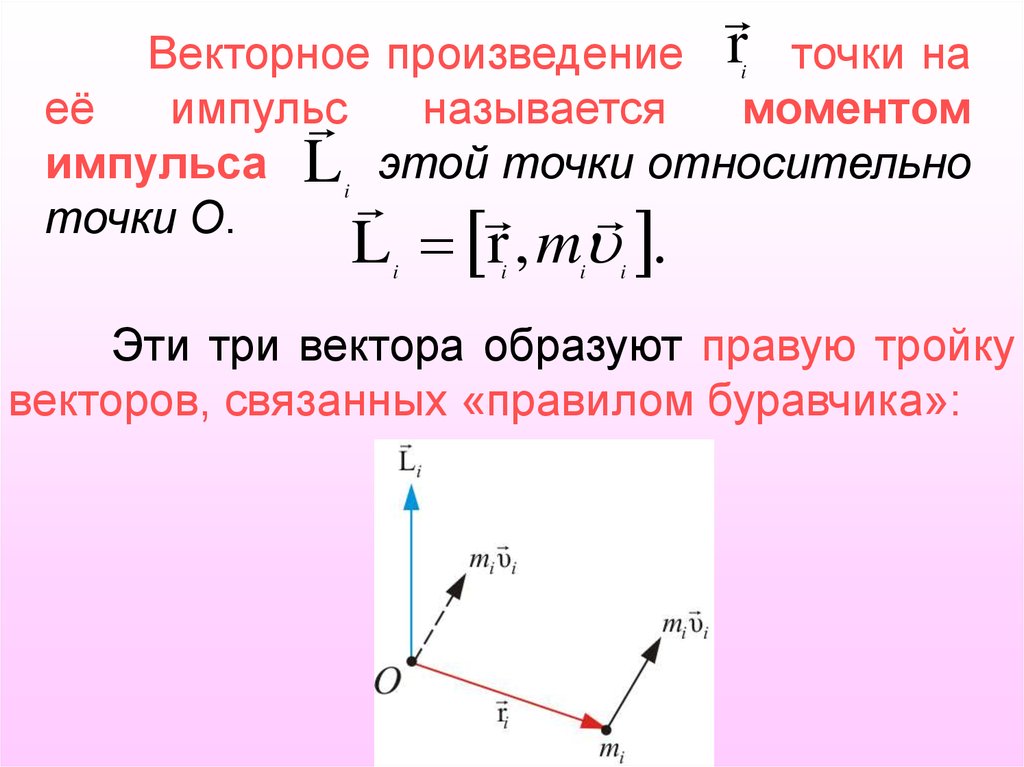
rВекторное произведение i точки на
её
импульс
называется моментом
импульса L i этой точки относительно
точки О.
L r , m .
i
i
i
i
Эти три вектора образуют правую тройку
векторов, связанных «правилом буравчика»:
6.
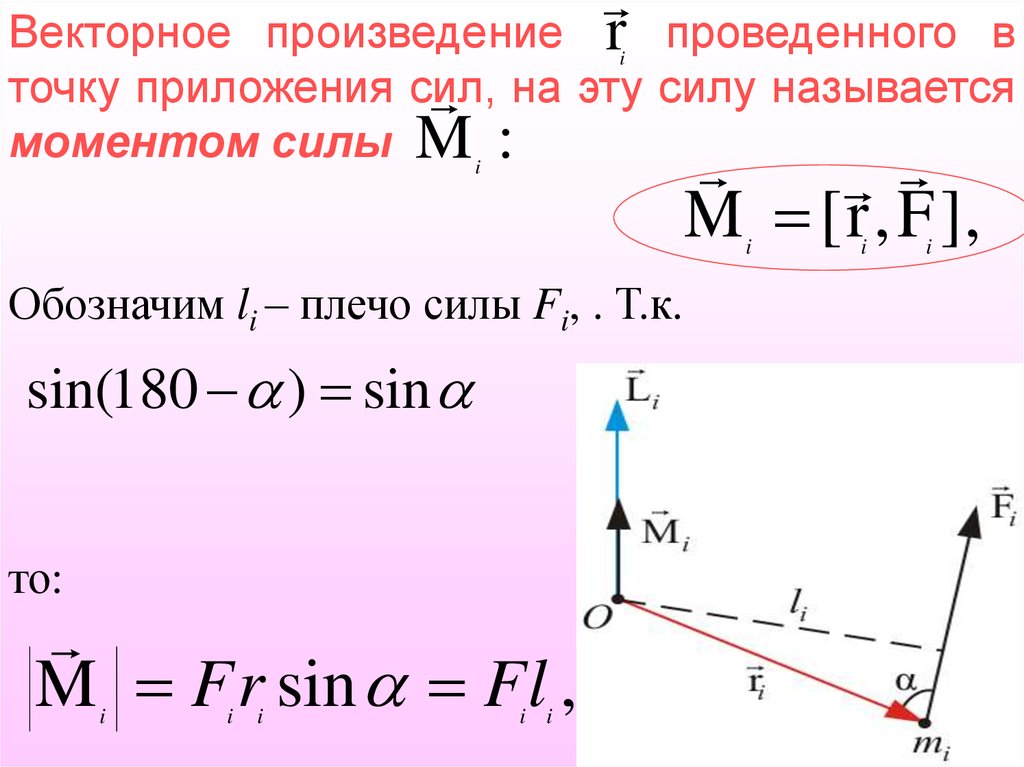
rВекторное произведение i проведенного в
точку приложения сил,
на эту силу называется
моментом силы M i :
M [ r , F ],
i
Обозначим li – плечо силы Fi, . Т.к.
sin(180 ) sin
то:
M F r sin Fl ,
i
i
i
i i
i
i
7.
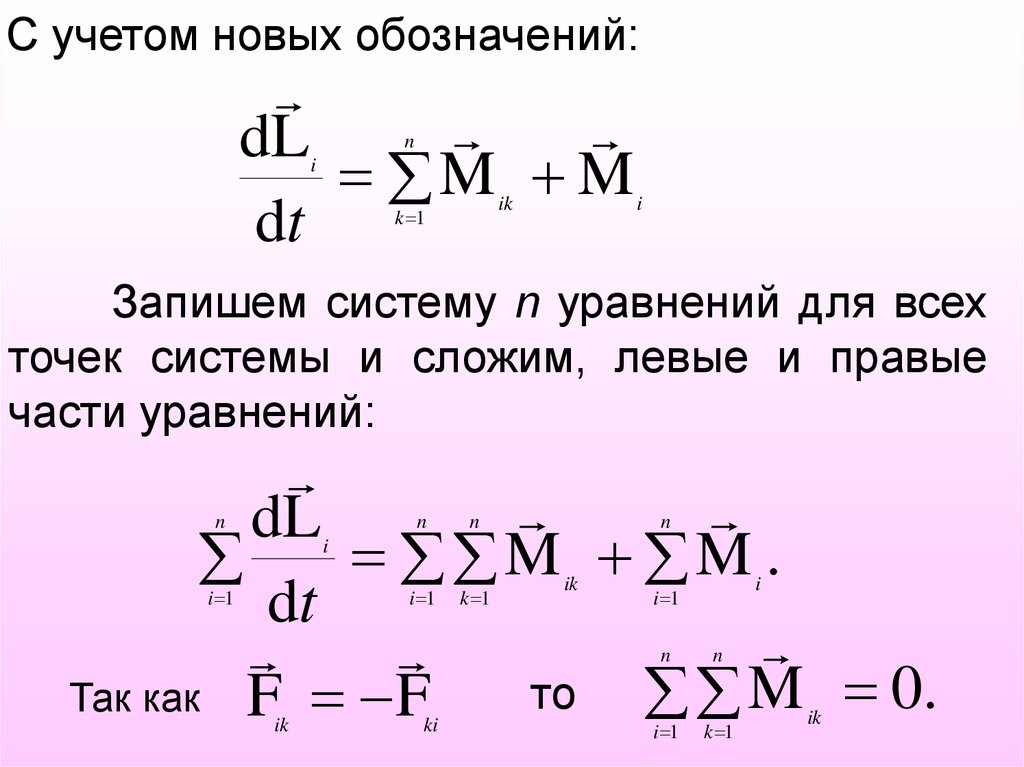
C учетом новых обозначений:dL
M M
dt
n
i
ik
k 1
i
Запишем систему n уравнений для всех
точек системы и сложим, левые и правые
части уравнений:
dL
M M .
dt
то M 0.
Так как F F
n
n
n
i 1
k 1
n
i
i 1
ik
ki
ik
i
i 1
n
n
i 1
k 1
ik
8.
Здесь суммапроизводной суммы:
производных
dL
dL
,
dt
dt
равна
n
i
где
L–
i 1
момент
импульса системы,
M – результирующий момент всех внешних
сил относительно точки О.
Окончательно получим:
dL
M
dt
внеш
9.
dLM
dt
внеш
Основной
закон
динамики
вращательного
движения твердого тела, вращающегося вокруг
точки.
L
Момент импульса системы
является основной
динамической характеристикой вращающегося тела.
Основное уравнение динамики поступательного движения
dp
F.
dt
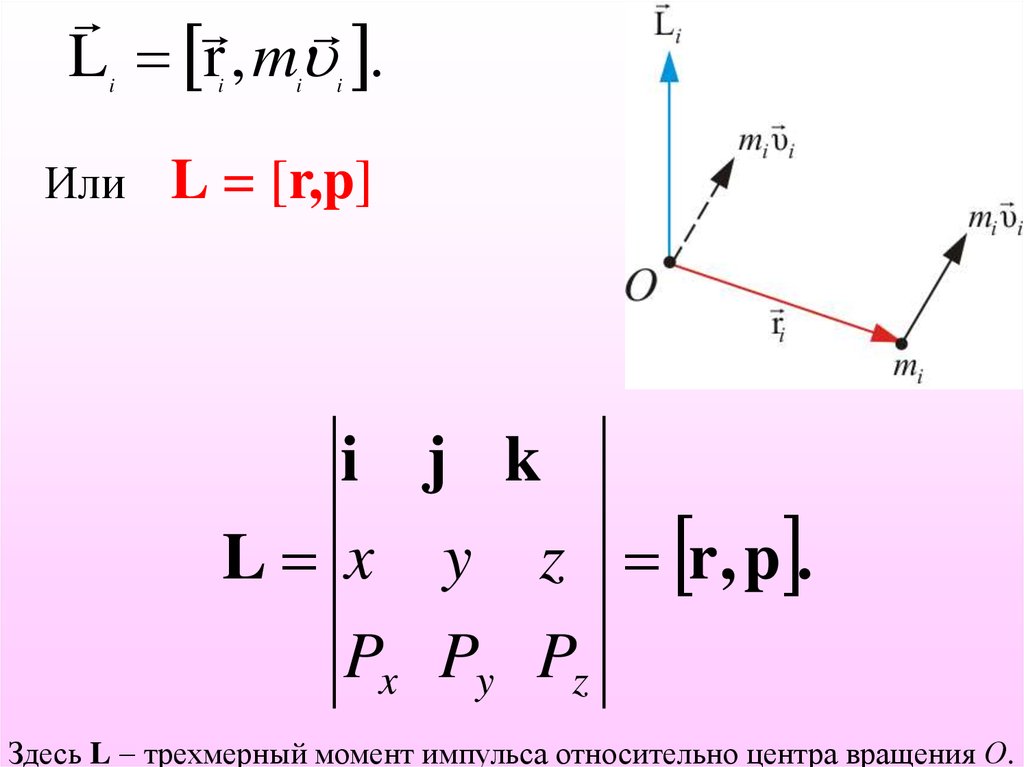
10.
L r , m .i
Или
i
i
i
L = [r,p]
i j k
L x y z r , p .
Px Py Pz
Здесь L трехмерный момент импульса относительно центра вращения О.
11. 2. Динамика вращательного движения твердого тела относительно оси
LВычислить вектор
– момент импульса системы
относительно произвольной точки не просто: надо
знать шесть проекций (три задают положение тела,
три задают положение точки).
Значительно проще найти момент импульса тела,
вращающегося вокруг неподвижной оси (z)
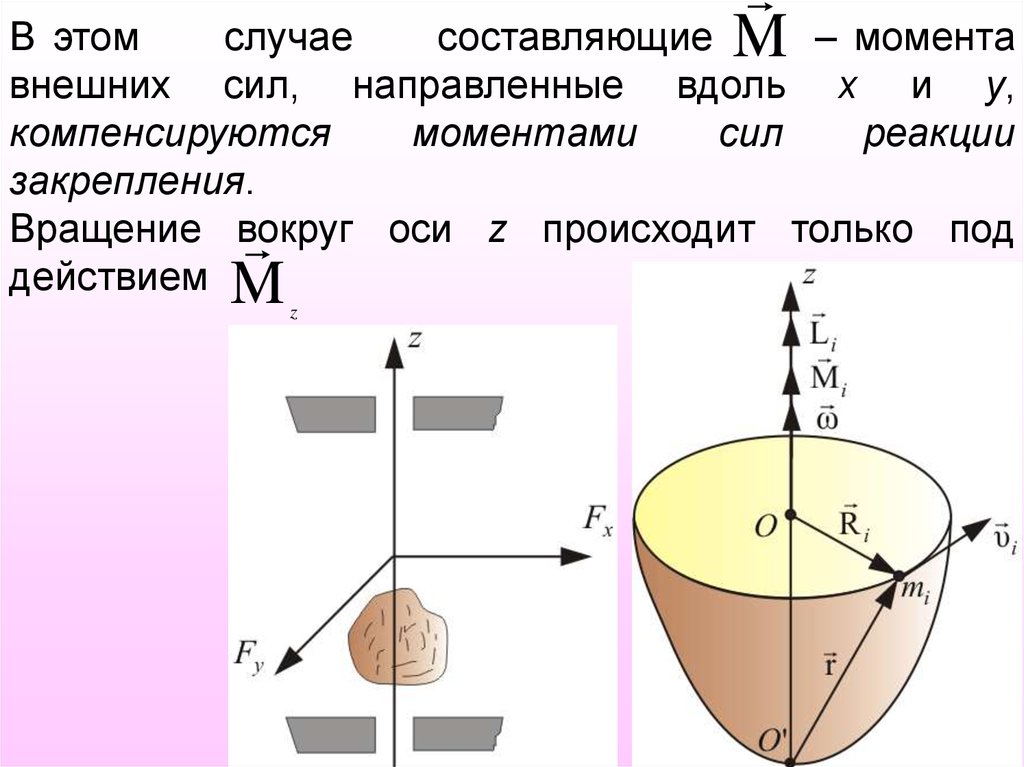
12.
MВ этом
случае
составляющие
– момента
внешних сил, направленные вдоль x и y,
компенсируются
моментами
сил
реакции
закрепления.
Вращение вокруг
оси z происходит только под
действием M
z
13.
Пусть некоторое тело вращается вокруг оси zПолучим уравнение динамики для некоторой
точки mi этого тела находящегося на
расстоянии R i от оси вращения. При этом
помним, что L z и M zнаправлены всегда вдоль
оси вращения z, поэтому в дальнейшем
опустим значок z.
dL
M
dt
i
i
d
[ R, m ] M
dt
i
i
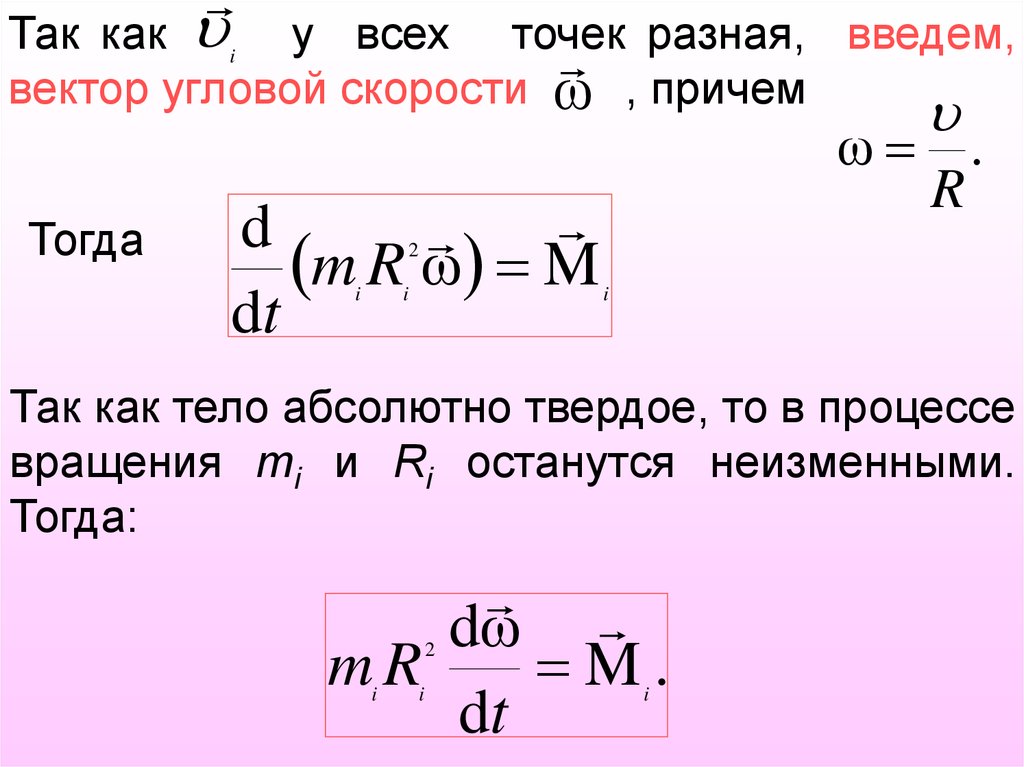
14.
Так как i у всех точек разная, введем,вектор угловой скорости ω , причем
Тогда
d
m R ω M
dt
ω .
R
2
i
i
i
Так как тело абсолютно твердое, то в процессе
вращения mi и Ri останутся неизменными.
Тогда:
dω
mR
M.
dt
2
i
i
i
15.
Обозначим Ii – момент инерции точкинаходящейся на расстоянии R от оси
вращения:
2
I mR .
i
i
i
Так как тело состоит из огромного количества
точек и все они находятся на разных
расстояниях от оси вращения, то момент
инерции тела равен:
m
I R dm,
2
0
где R – расстояние от оси z до dm.
Как видно,
скалярная.
момент
инерции
I
–
величина
16.
Просуммировав по всем i-ым точкам, получимdω
I
M
dt
Iε M
Это основное уравнение динамики
тела вращающегося вокруг неподвижной
оси.
Основное
уравнение
динамики
поступательного движения тела.
ma F
Idω Mdt;
Idω dL
17.
LL Iω
где
– момент импульса тела
вращающегося вокруг оси z
(для поступательного движения p m
).
L
M
При этом помним, что
и
динамические
характеристики
вращательного
движения
направленные всегда вдоль оси вращения..
18. Основные характеристики вращательного движения
формулы для одной точкивращающегося твердого тела
Суммируя по всему телу, получим
Lz Li J z ω
n
i 1
n
M z M i J zε
i 1
Момент импульса
Li J i z ω
M i Ji zε
J i z mi ri
i 1
Момент силы
2 Момент инерции
твердого тела
Z
Момент силы
твердого тела
n
J z Ji z
Момент импульса
Момент инерции
твердого тела
Основной закон динамики вращательного движения
твердого тела
Li|z
ω
K
ri
Mi
19. 3. Расчет моментов инерции некоторых простых тел.
mI R dm
2
По формуле
не всегда
0
просто
удается рассчитать момент
инерции тел произвольной формы.
Наиболее легко эта задача решается
для тел простых форм, вращающихся
вокруг оси, проходящей через центр
инерции тела Ic.
В этом случае Ic вычисляется по
2
формуле:
I kmR
c
20.
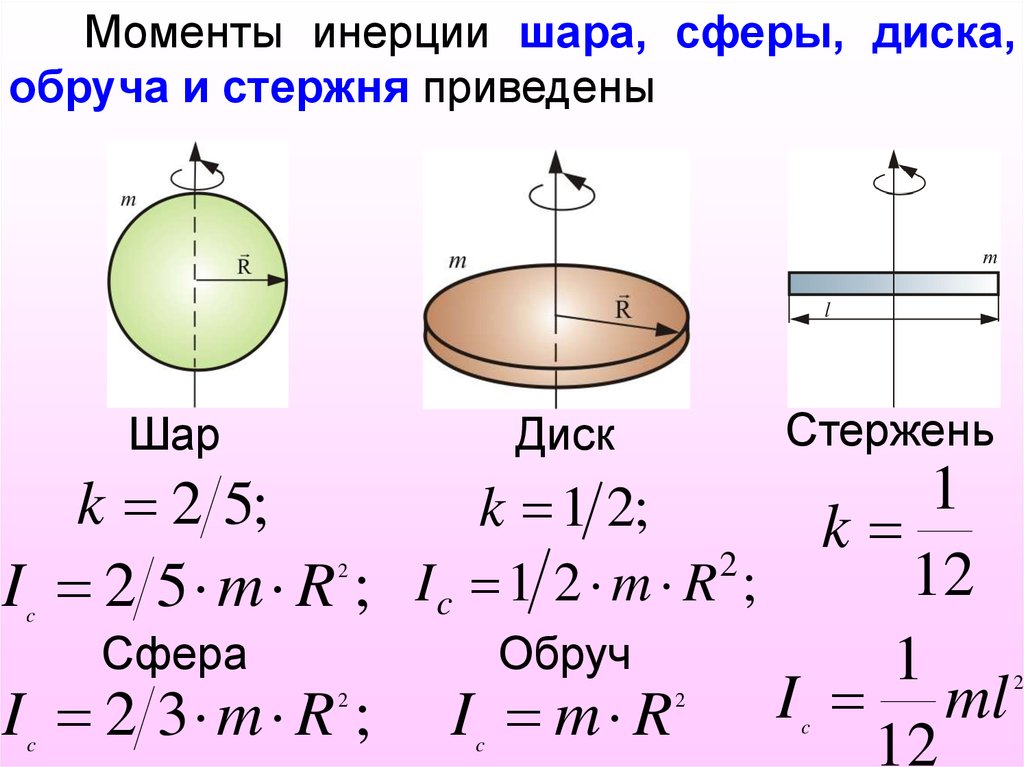
Моменты инерции шара, сферы, диска,обруча и стержня приведены
Шар
Стержень
Диск
k 2 5;
k 1 2;
2
I 2 5 m R ; Ic 1 2 m R ;
2
c
Сфера
I 2 3 m R ;
2
c
Обруч
I m R
c
2
1
k
12
1
I ml
12
c
2
21.
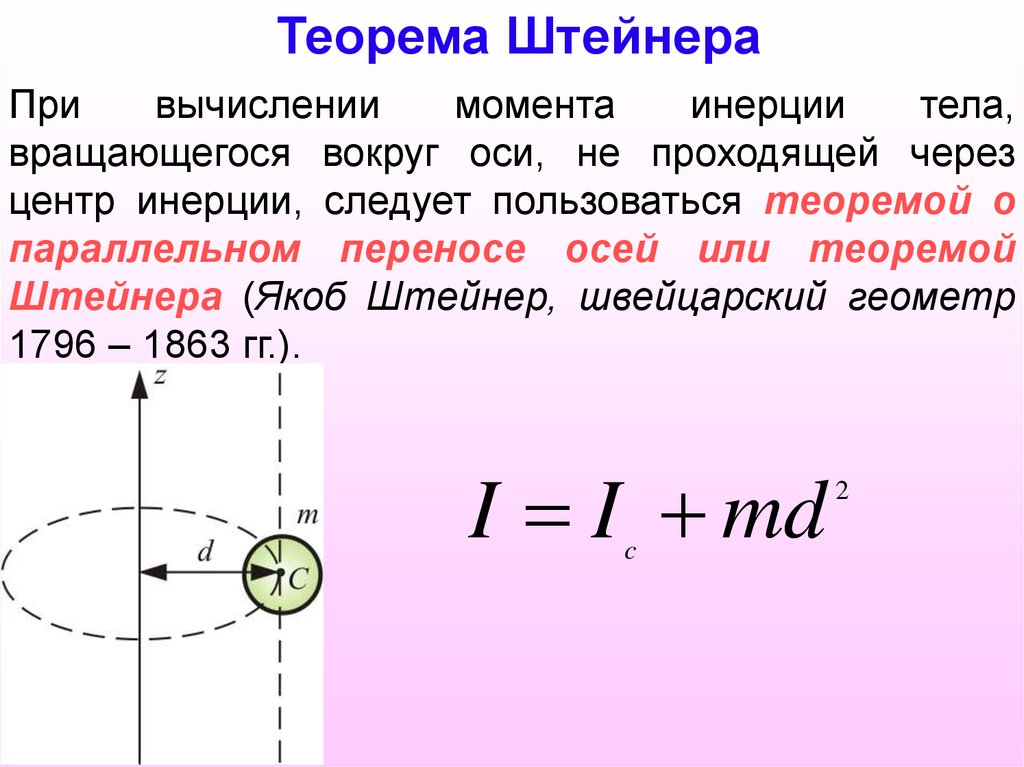
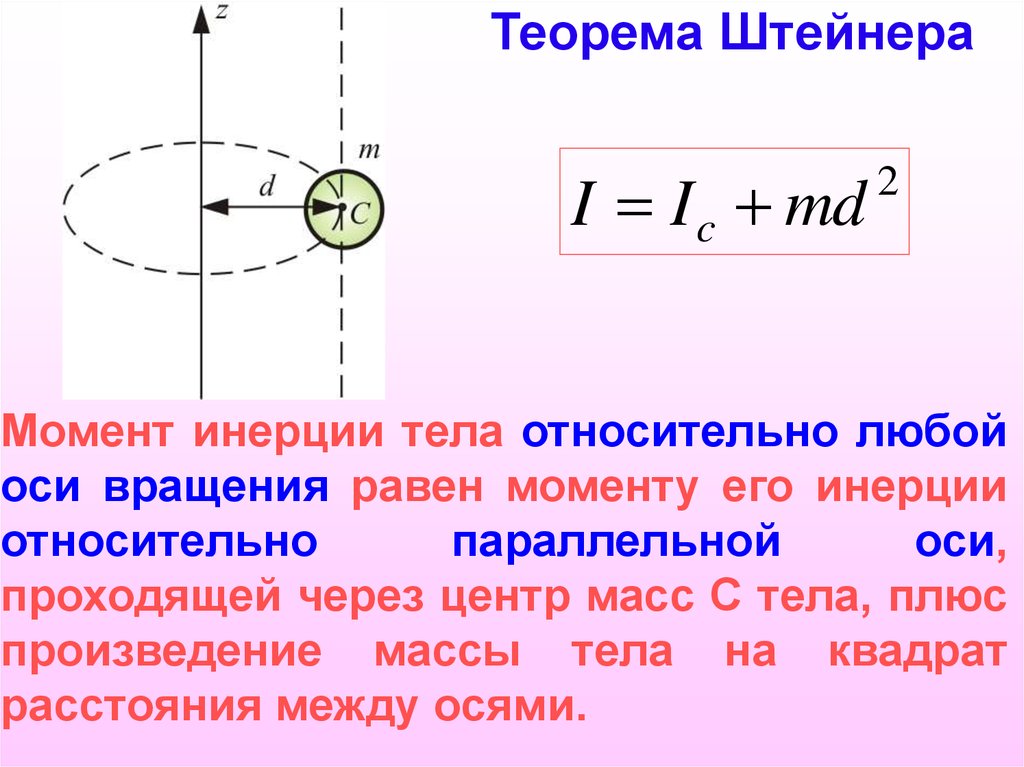
Теорема ШтейнераПри
вычислении
момента
инерции
тела,
вращающегося вокруг оси, не проходящей через
центр инерции, следует пользоваться теоремой о
параллельном переносе осей или теоремой
Штейнера (Якоб Штейнер, швейцарский геометр
1796 – 1863 гг.).
I I md
c
2
22.
Теорема ШтейнераI I c md
2
Момент инерции тела относительно любой
оси вращения равен моменту его инерции
относительно
параллельной
оси,
проходящей через центр масс С тела, плюс
произведение массы тела на квадрат
расстояния между осями.
23.
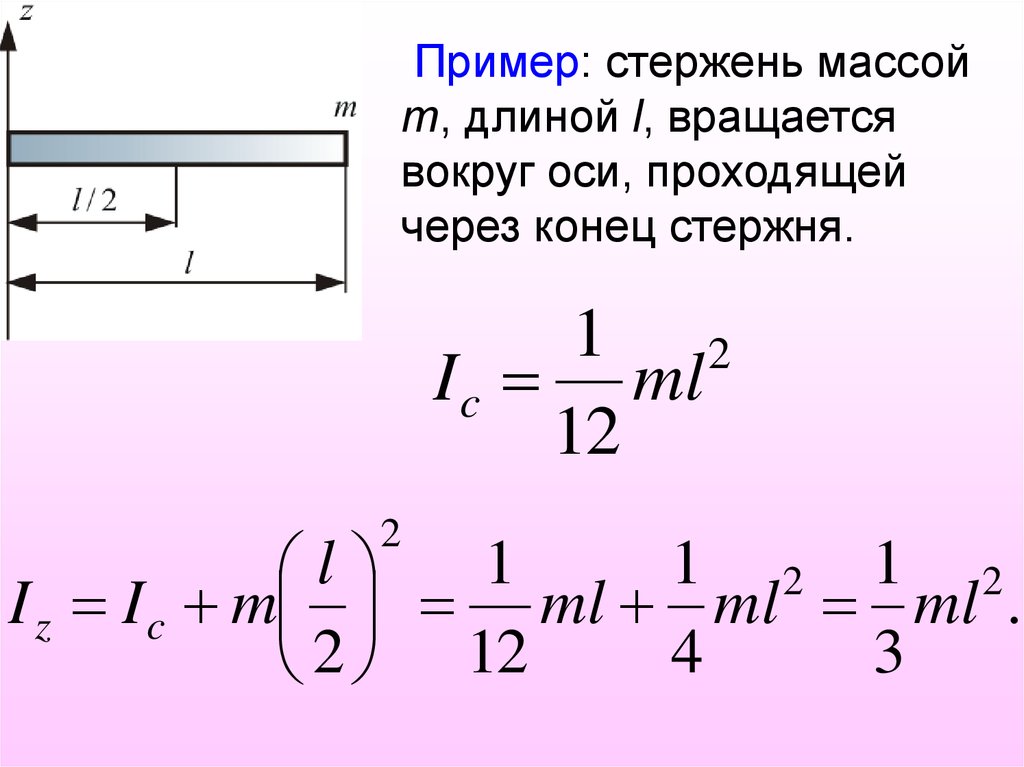
Пример: стержень массойm, длиной l, вращается
вокруг оси, проходящей
через конец стержня.
1 2
I c ml
12
2
1
1 2 1 2
l
I z I c m ml ml ml .
4
3
2 12
24. 4. Кинетическая энергия вращающегося тела
Кинетическая энергия – величинааддитивная, поэтому кинетическая энергия
тела, движущегося произвольным образом,
равна сумме кинетических энергий всех n
материальных точек, на которое это тело
можно мысленно разбить:
m
K
.
2
2
n
i
i 1
i
25.
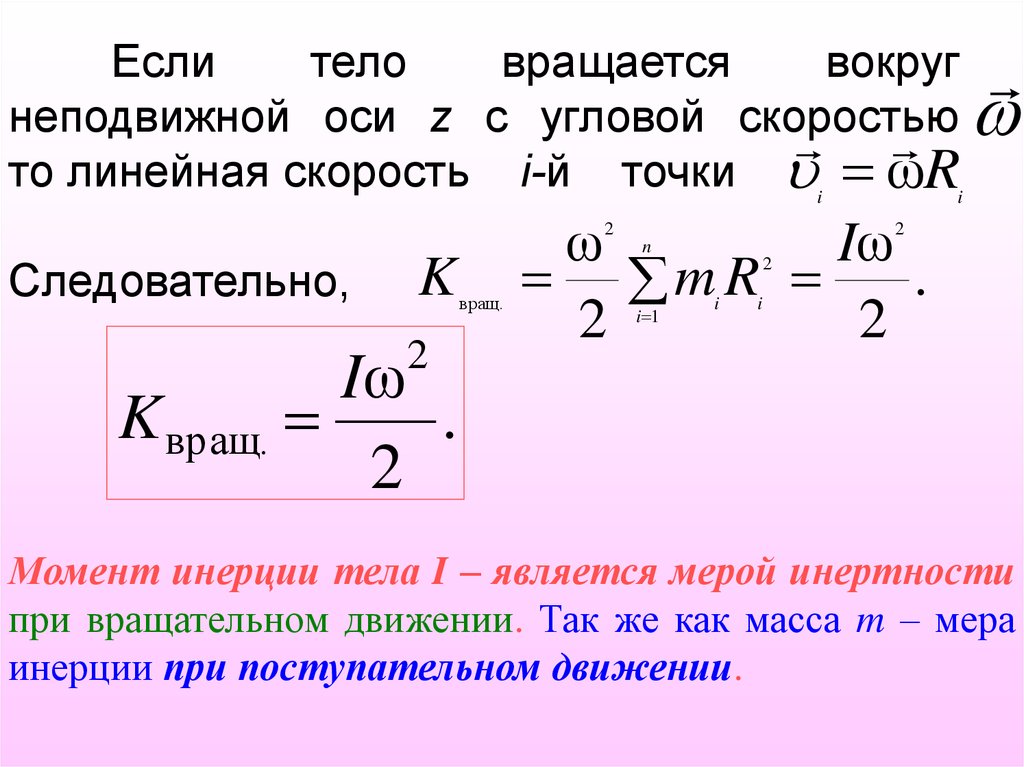
Еслитело
вращается
вокруг
неподвижной оси z с угловой скоростью
то линейная скорость i-й точки i ωRi
K
Iω
K вращ.
.
2
2
ω
Iω
m R
.
2
2
2
Следовательно,
2
n
2
вращ.
i 1
i
i
Момент инерции тела I – является мерой инертности
при вращательном движении. Так же как масса m – мера
инерции при поступательном движении.
26.
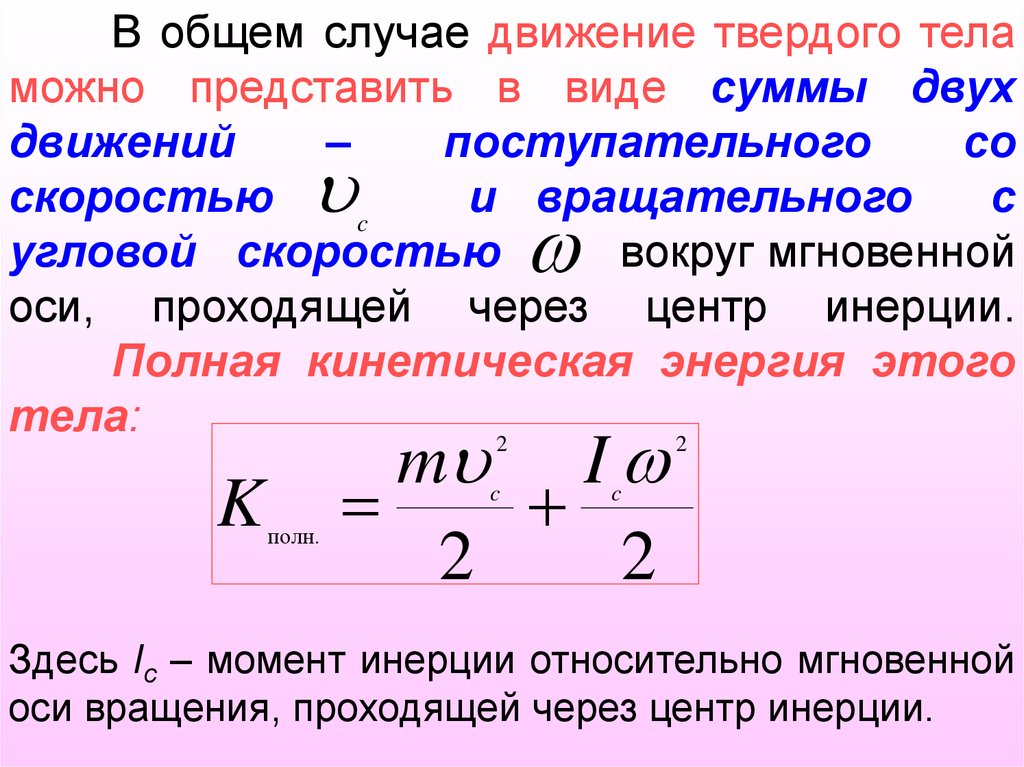
В общем случае движение твердого теламожно представить в виде суммы двух
движений
–
поступательного
со
скоростью
и вращательного
с
c
угловой скоростью
вокруг мгновенной
оси, проходящей через центр инерции.
Полная кинетическая энергия этого
тела:
2
2
K
m I
2
2
c
полн.
c
Здесь Ic – момент инерции относительно мгновенной
оси вращения, проходящей через центр инерции.
27.
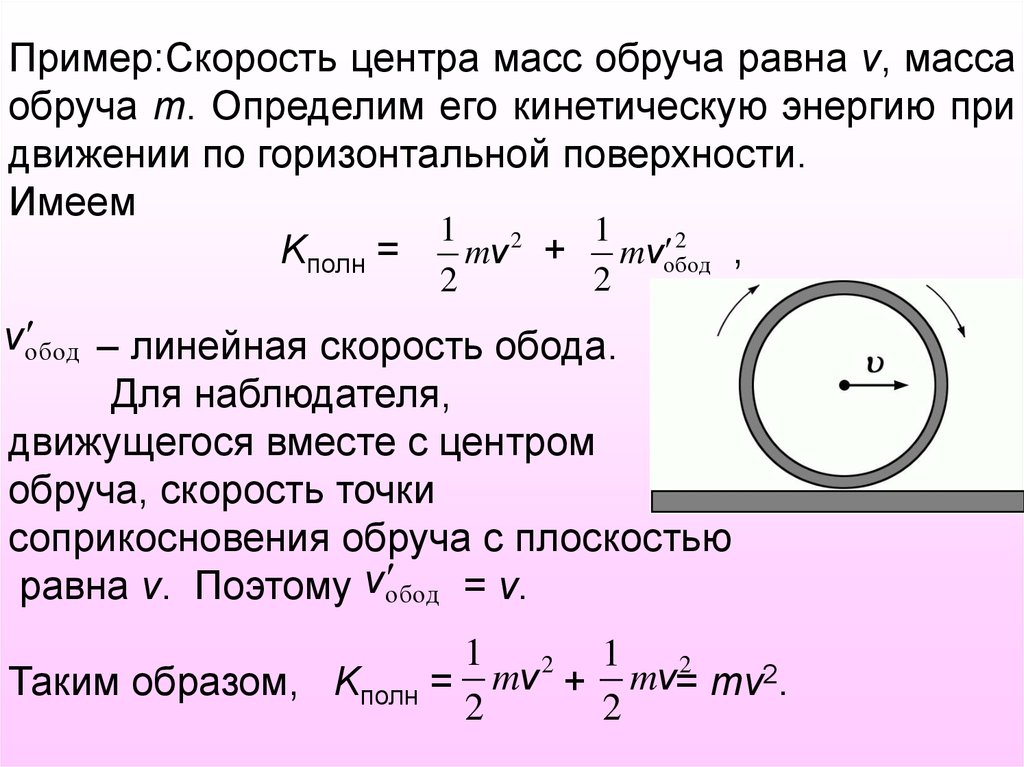
Пример:Скорость центра масс обруча равна v, массаобруча m. Определим его кинетическую энергию при
движении по горизонтальной поверхности.
Имеем
1
1
2
2 ,
Kполн =
mv + mv обод
2
2
v обод
– линейная скорость обода.
Для наблюдателя,
движущегося вместе с центром
обруча, скорость точки
соприкосновения обруча с плоскостью
равна v. Поэтому v обод
= v.
1
1
2
2
m
v
m
v
Таким образом, Kполн =
+
= mv2.
2
2
28. 5. Закон сохранения момента импульса
Для замкнутой системы тел момент внешних силвсегда равен нулю, так как внешние силы вообще
не действуют на замкнутую систему:
dL
M 0
dt
Iω const
L const,
Закон сохранения момента импульса
29.
Закон сохранения момента импульса –момент импульса замкнутой системы тел
относительно любой неподвижной точки не
изменяется с течением времени.
Это один из фундаментальных законов природы.
Аналогично для замкнутой системы вращающихся
вокруг оси z:
dL
M 0,
dt
z
z
отсюда
L const или
I ω const
z
z
30.
Если момент внешних сил относительнонеподвижной оси вращения тождественно
равен
нулю,
то
момент
импульса
относительно этой оси не изменяется в
процессе движения.
Момент импульса и для незамкнутых систем
постоянен, если результирующий момент внешних
сил, приложенных к системе, равен нулю.
31.
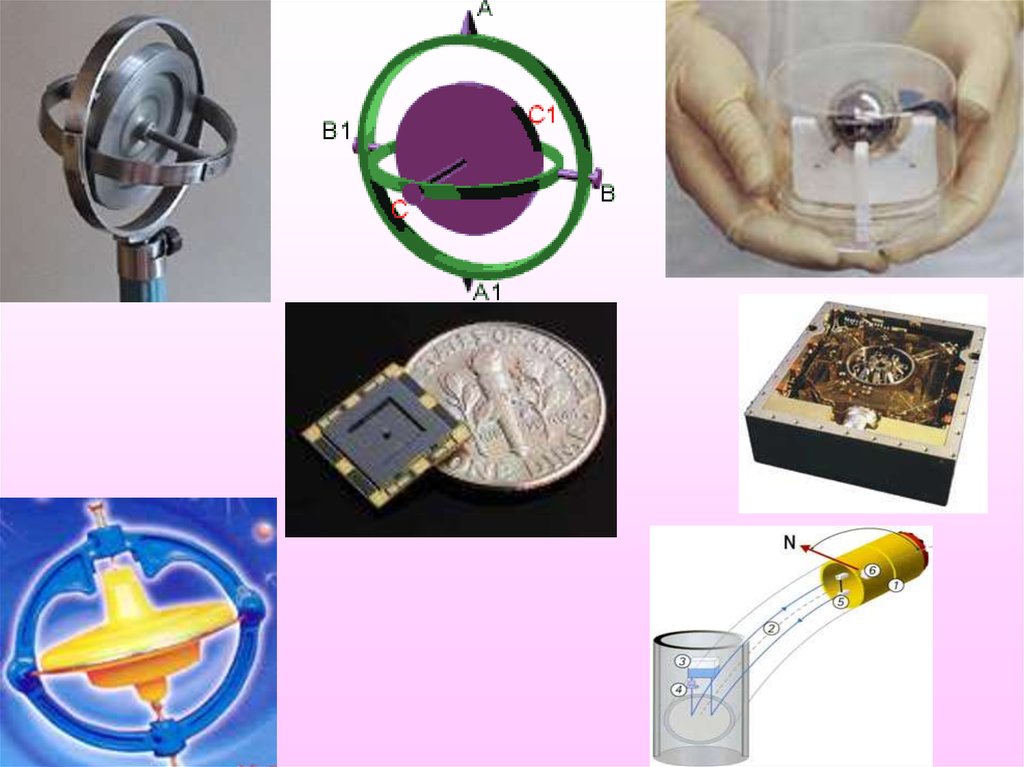
Уравновешенный гироскоп – быстровращающееся тело, имеющее три степени свободы
Используется гироскоп в различных
навигационных
устройствах
кораблей,
самолетов, ракет (гирокомпас, гирогоризонт).
32.
33.
34. 6. Законы сохранения и их связь с симметрией пространства и времени
Законы сохранения есть следствиесимметрии пространства – времени.
Три фундаментальных закона природы:
закон сохранения импульса,
момента импульса,
энергии.
Эти
законы
выполняются
инерциальных системах отсчета.
только
в
35.
Импульс и момент импульса сохраняютсяв том случае, если систему можно считать
замкнутой (сумма всех внешних сил и всех
моментов сил равна нулю).
Для сохранения энергии тела условия
замкнутости недостаточно – тело должно быть
еще и адиабатически изолированным (т.е. не
участвовать в теплообмене).
36.
1. В основе закона сохранения энергии лежитоднородность времени, т. е. равнозначность
всех моментов времени (симметрия по
отношению к сдвигу начала отсчета времени).
Равнозначность следует понимать в том
смысле, что замена моментом времени t1 на
момент времени t2, без изменения значений
координат и скорости частиц не изменяет
механические свойства системы.
37.
2. В основе закона сохранения импульсалежит однородность пространства, т. е.
одинаковость свойств пространства во всех
точках (симметрия по отношению к сдвигу
начала координат).
Одинаковость следует понимать в том
смысле,
что
параллельный
перенос
замкнутой
системы
из
одного
места
пространства в другое, без изменения
взаимного расположения и скоростей частиц,
не изменяет механические свойства системы.
38.
3. В основе закона сохранения моментаимпульса лежит изотропия пространства, т.
е. одинаковость свойств пространства по всем
направлениям (симметрия по отношению к
повороту осей координат).
Одинаковость следует понимать в том
смысле, что поворот замкнутой системы, как
целого, не отражается на её механических
свойствах.
39.
Между законами и законами сохранения имеетсяпринципиальная разница.
Если задана сила, действующая на материальную
точку и начальные условия, то можно найти закон
движения, траекторию, величину и направление
скорости в любой момент времени и т. п.
Законы сохранения не дают нам прямых указаний на
то, как должен идти тот или иной процесс. Они
говорят лишь о том, какие процессы запрещены и
потому в природе не происходят.
40.
Принципы запрета:Любое явление, при котором не выполняются
хотя бы один из законов сохранения, запрещено,
и в природе такие явления никогда не
наблюдаются.
Всякое явление, при котором не нарушается ни
один из законов сохранения, в принципе может
происходить.
41.
Может ли покоящееся тело за счет внутреннейэнергии начать двигаться? Этот процесс не
противоречит закону сохранения энергии. Нужно
лишь, чтобы возникающая кинетическая энергия
точно равнялась убыли внутренней энергии.
Такой процесс противоречит закону сохранения
импульса. Раз тело покоилось, то его импульс был
равен нулю. А если оно станет двигаться, то его
импульс сам собой увеличится, что невозможно.
Поэтому внутренняя энергия тела не может
превратиться в кинетическую, если тело не
распадётся на части.
42.
При этом возникшие осколки могут двигаться так,чтобы их центр масс оставался в покое, – а только
этого и требует закон сохранения импульса.
Итак, для того чтобы внутренняя энергия
покоящегося
тела
могла
превратиться
в
кинетическую, это тело должно распадаться на
части. Если же есть еще один какой-либо закон,
запрещающий распад этого тела на части, то его
внутренняя
энергия
и
масса
покоя
будут
постоянными величинами.
43.
Фундаментальность законов сохранениязаключается в их универсальности:
- Они справедливы при изучении любых
физических
процессов
(механических,
тепловых, электромагнитных, и др.).
- Они одинаково применимы в релятивистском
и нерелятивистском движении,
•в микромире, где справедливы квантовые
представления
•в макромире.
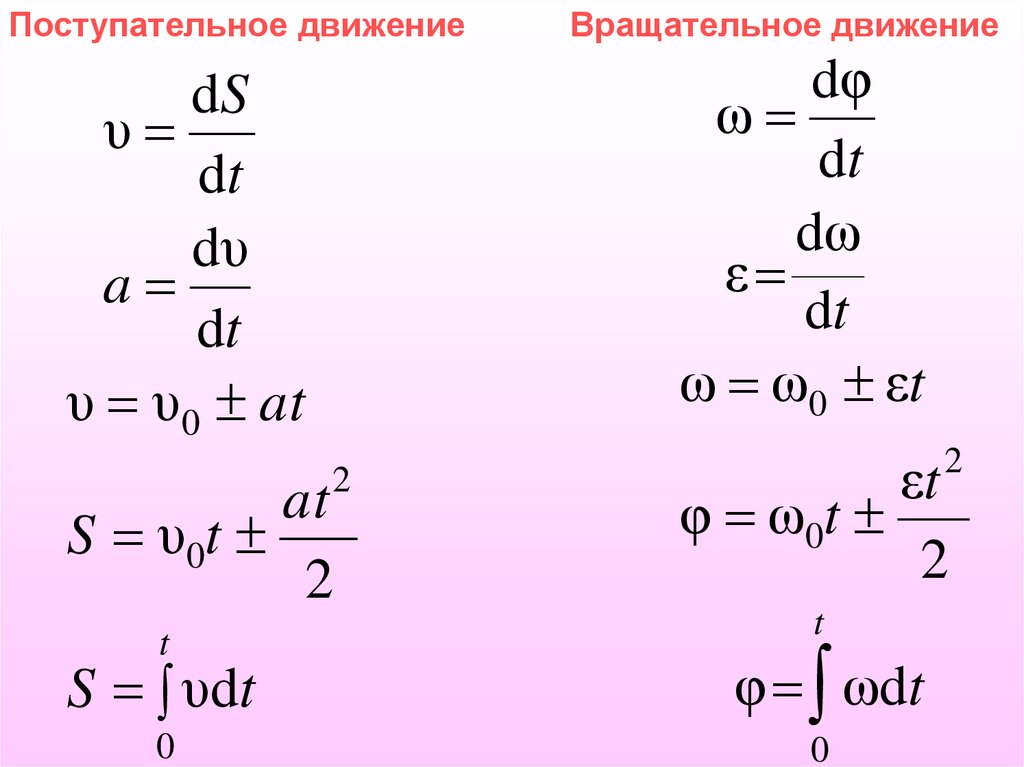
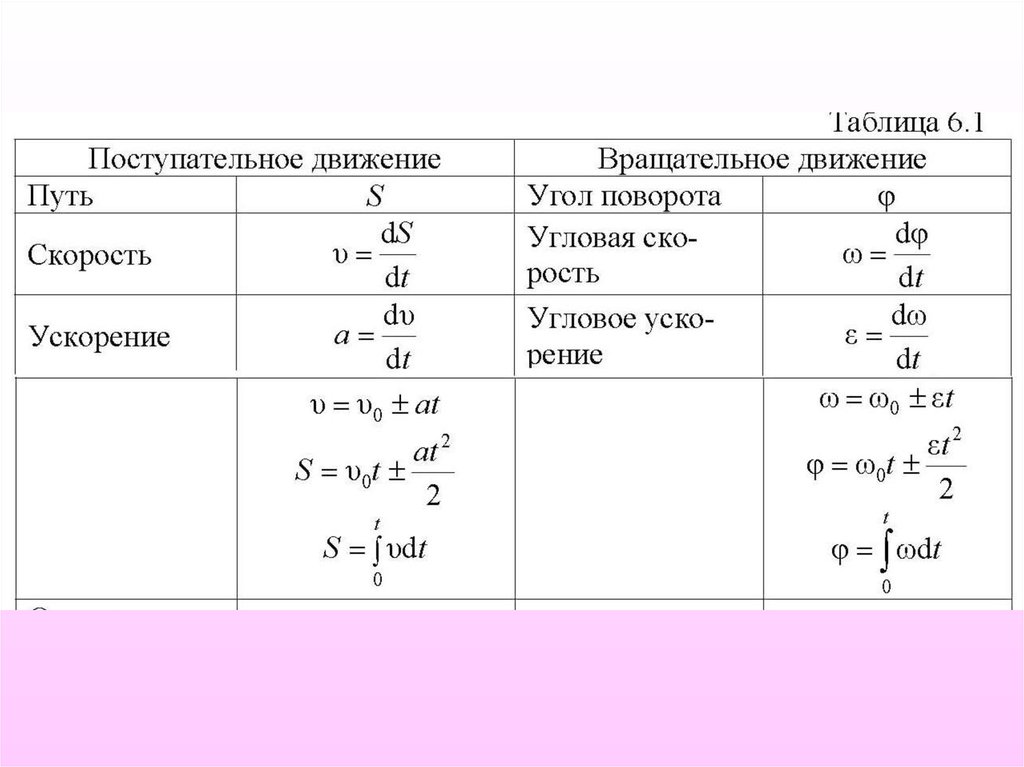
44. 7. Сходство и различие линейных и угловых характеристик движения
Формулыкинематики
и
динамики
вращательного
движения
легко
запоминаются, если сопоставить их с
формулами поступательного движения
45.
Поступательное движениеdφ
ω
dt
dω
ε
dt
ω ω 0 εt
dS
υ
dt
dυ
a
dt
υ υ0 at
2
at
S υ 0t
2
t
S υ dt
0
Вращательное движение
εt
φ ω 0t
2
2
t
φ ωd t
0
46.
dLM
dt
Iε M
L Iω
Iω const
dp
F
dt
ma F
p m
m const
A FS
A Mф
N M
N F
m
mgh const
2
2
Iω
mgh const
2
2