

























 Физика
ФизикаПохожие презентации:










Связи и реакции связей. Плоская система сходящихся сил
1.
Связи и реакции связей.Плоская система сходящихся
сил.
2.
Плоская система силЛинии действия всех сил лежат в одной
плоскости
Пространственная система сил если
линии действия всех сил не лежат в
одной плоскости
3.
Сходящаяся система силСистема сил, линии действия которых
пересекаются в одной точке
4.
Система сходящихся сил эквивалентнаодной силе – равнодействующей,
которая
равна векторной сумме сил
приложена в точке пересечения линий
их действия
5.
МЕТОДЫ ОПРЕДЕЛЕНИЯРАВНОДЕЙСТВУЮЩЕЙ
6.
Метод параллелограммов силНа основании аксиомы параллелограмма
сил, каждые две силы системы,
последовательно приводятся к одной
силе − равнодействующей
7.
Векторный силовой многоугольникПоочерёдно откладываем каждый
вектор силы от конечной точки
предыдущего вектора
Получаем многоугольник:
стороны векторы сил системы,
замыкающая сторона − вектор
равнодействующей системы
сходящихся сил
8.
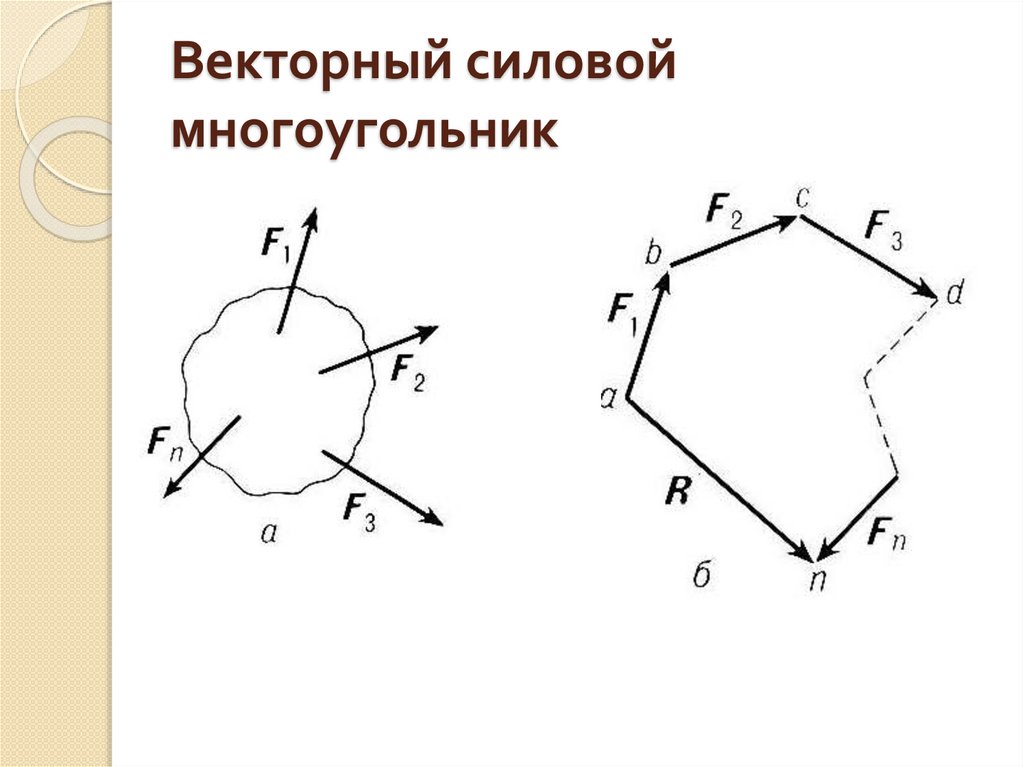
Векторный силовоймногоугольник
9.
Условия равновесия системысходящихся сил
Геометрическое условие
для равновесия системы сходящихся сил
необходимо и достаточно, чтобы
векторный силовой многоугольник,
построенный на этих силах, был
замкнутым
10.
Условия равновесия системысходящихся сил
Аналитические условия
Для равновесия системы сходящихся
сил необходимо и достаточно, чтобы
алгебраические суммы проекций всех
сил на координатные оси равнялись
нулю
11.
РЕШЕНИЕ ЗАДАЧ НАРАВНОВЕСИЕ
ГЕОМЕТРИЧЕСКИМ
СПОСОБОМ
12.
Геометрический способУдобен , если в системе три силы
Тела считаются абсолютно твёрдым
13.
Алгоритм1. Определить возможное направление
реакций связей
2. Вычертить многоугольник сил системы,
начиная с известных сил в некотором
масштабе
3. Измерить полученные векторы сил,
определить их величину, учитывая
масштаб
4. Для уточнения определить величины
векторов с помощью геометрических
зависимостей
14.
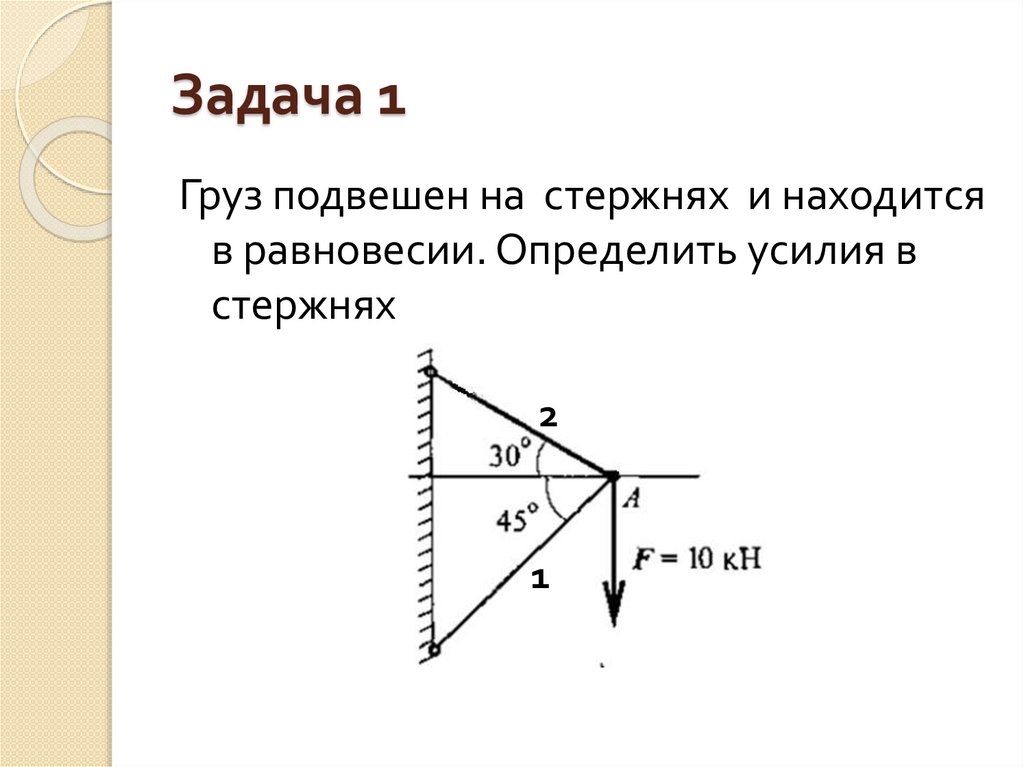
Задача 1Груз подвешен на стержнях и находится
в равновесии. Определить усилия в
стержнях
2
1
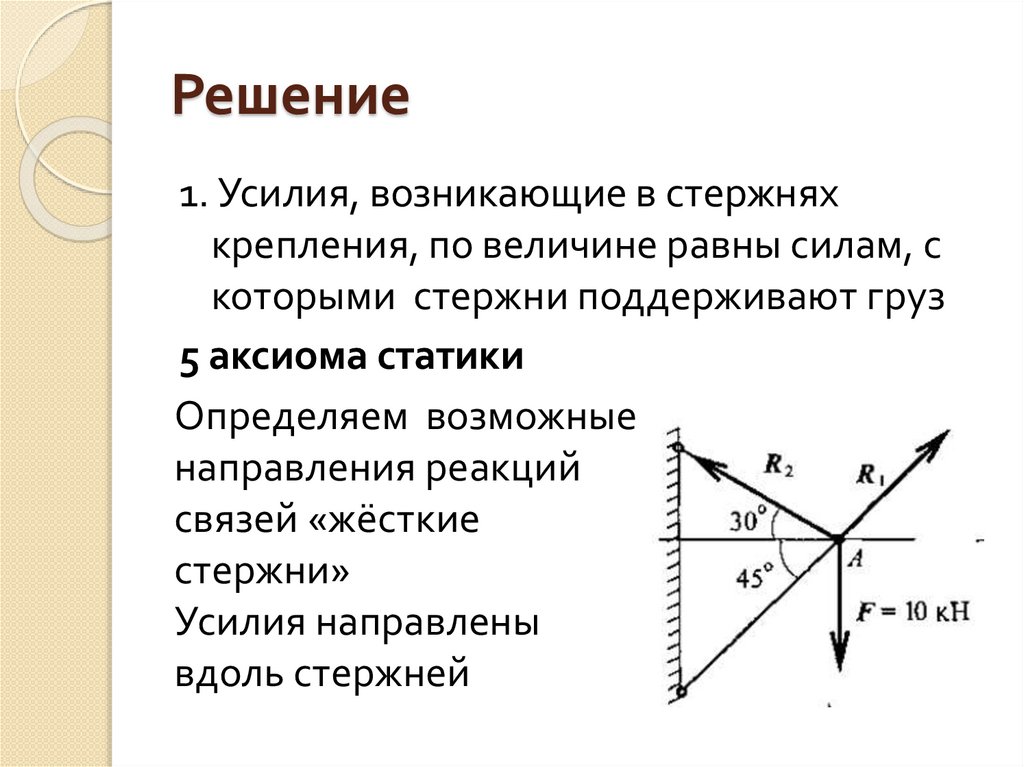
15.
Решение1. Усилия, возникающие в стержнях
крепления, по величине равны силам, с
которыми стержни поддерживают груз
5 аксиома статики
Определяем возможные
направления реакций
связей «жёсткие
стержни»
Усилия направлены
вдоль стержней
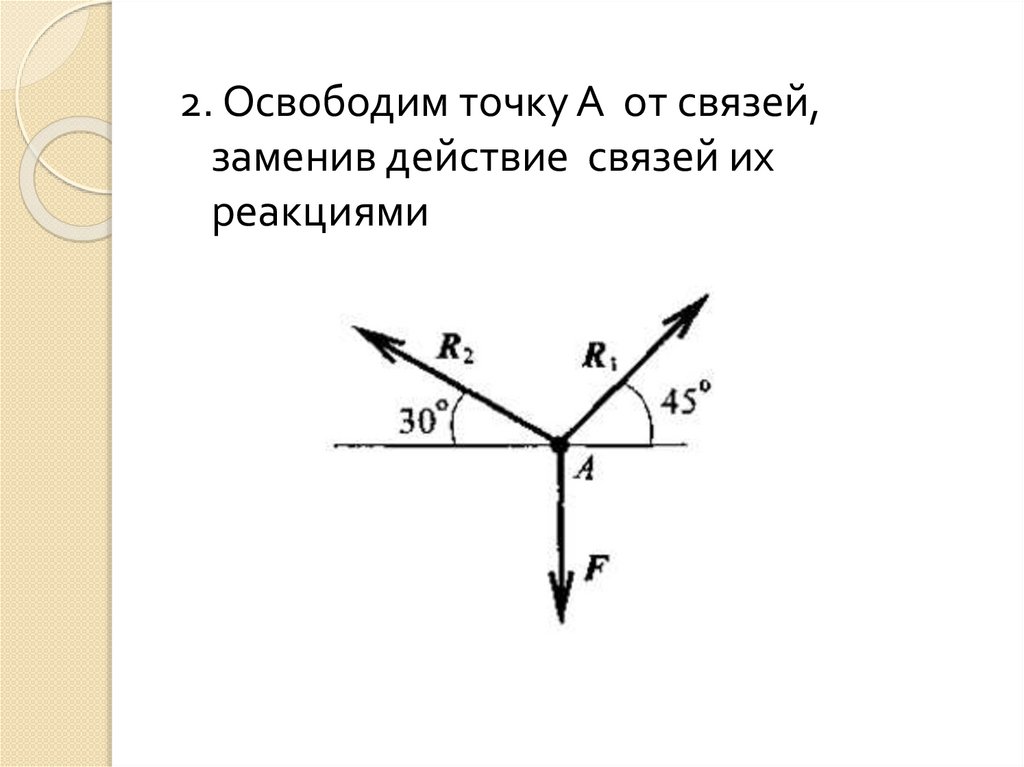
16.
2. Освободим точку А от связей,заменив действие связей их
реакциями
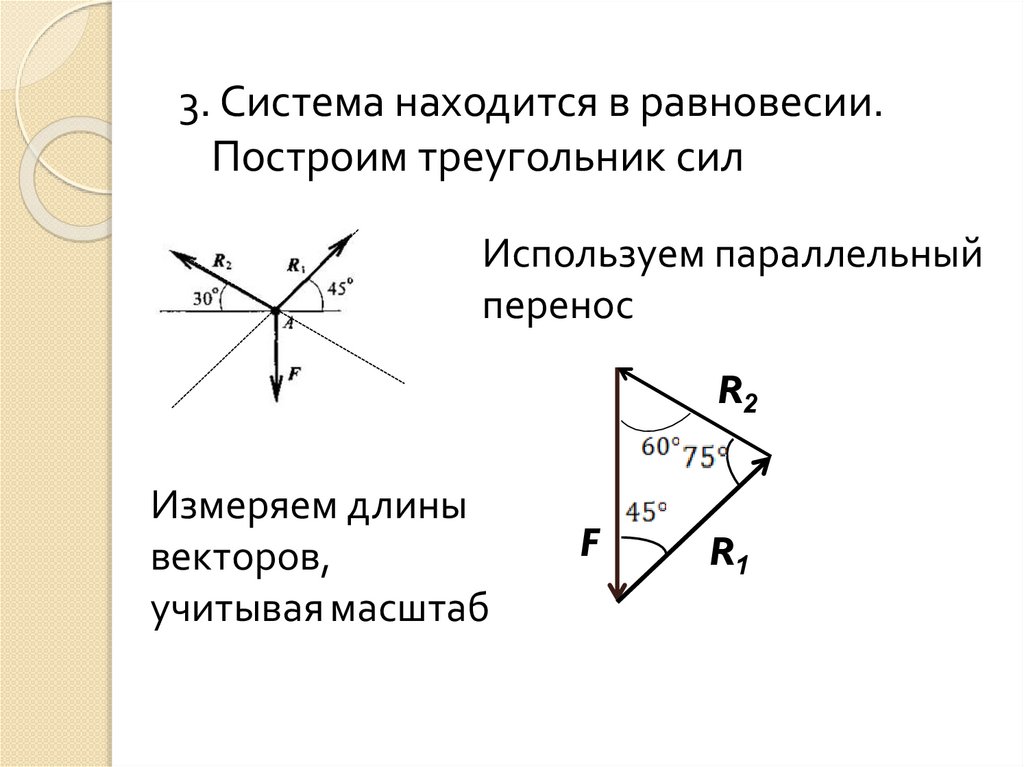
17.
3. Система находится в равновесии.Построим треугольник сил
Используем параллельный
перенос
R2
Измеряем длины
векторов,
учитывая масштаб
F
R1
18.
4. Для точности расчётов используемтеоремой синусов
Для данного случая
19.
СтатикаОПРЕДЕЛЕНИЕ
РАВНОДЕЙСТВУЮЩЕЙ
АНАЛИТИЧЕСКИМ
СПОСОБОМ
20.
Условие равновесия ваналитической форме
Плоская система сходящихся сил
находится в равновесии, если
алгебраическая сумма проекций всех
сил системы на любую ось системы
21.
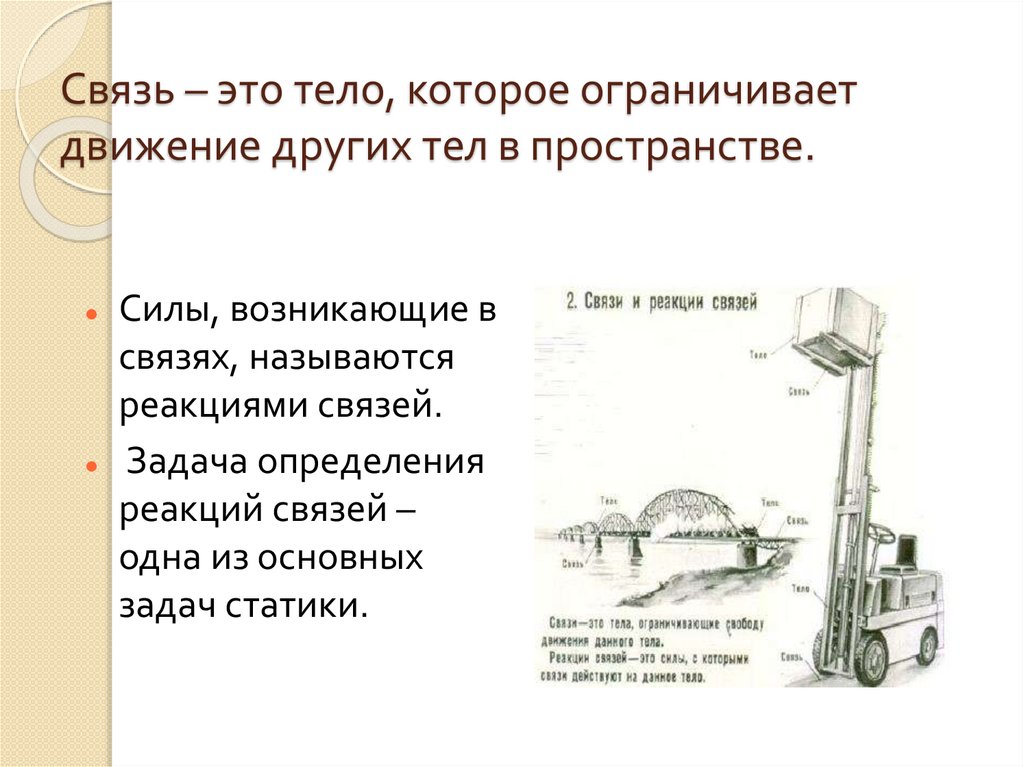
Связи и их реакции22.
Связь – это тело, которое ограничиваетдвижение других тел в пространстве.
Силы, возникающие в
связях, называются
реакциями связей.
Задача определения
реакций связей –
одна из основных
задач статики.
23.
ГЛАДКАЯ ПОВЕРХНОСТЬРеакция гладкой
поверхности должна
быть всегда
перпендикулярна к
опорной
поверхности или к
касательной,
проведенной к этой
поверхности
24.
ГИБКАЯ СВЯЗЬРеакция гибкой
связи расположена
непосредственно в
самой связи.
Гибкая связь может
только
растягиваться.
25.
ТОЧЕЧНАЯ ОПОРАРеакция точечной
опоры всегда
перпендикулярна к
опирающейся
поверхности или к
касательной,
проведенной к этой
поверхности.
26.
Виды связей и реакции в них27.
Домашнее заданиеЗадача 2
Груз подвешен на стержнях и канатах и
находится в равновесии.
Определить усилия в стержнях
28.
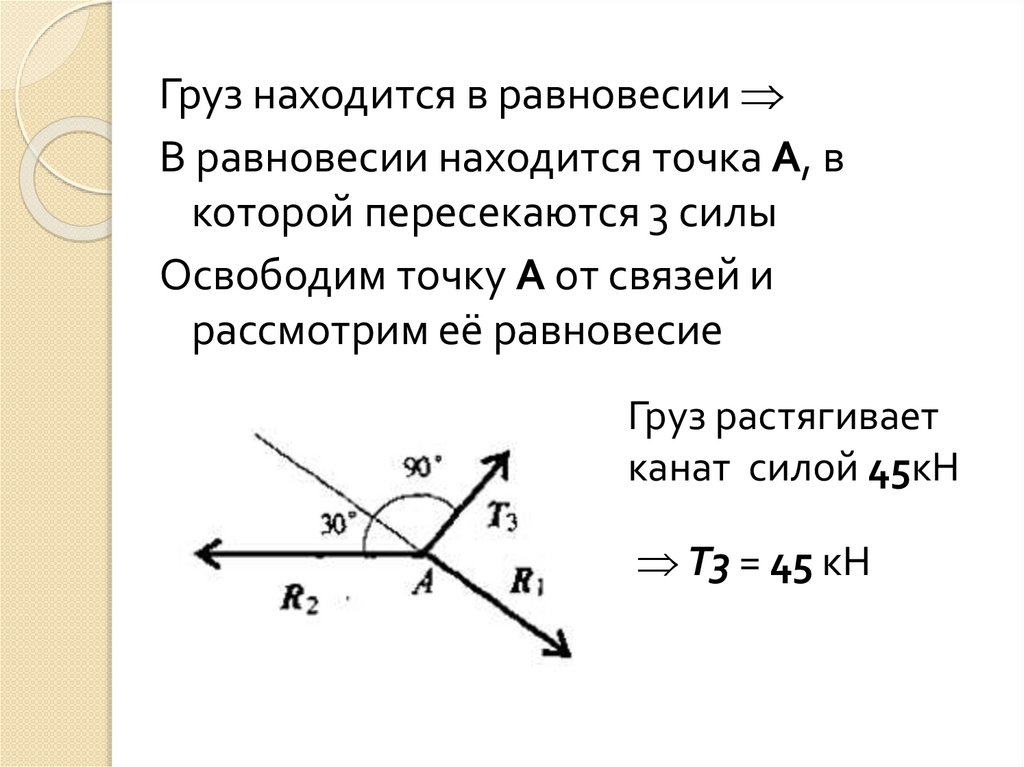
Решение1. Определим направления усилий,
приложенных в точке А
Реакции стержней вдоль стержней.
Усилие от каната вдоль каната от точки А
к точке В
29.
Груз находится в равновесииВ равновесии находится точка А, в
которой пересекаются 3 силы
Освободим точку А от связей и
рассмотрим её равновесие
Груз растягивает
канат силой 45кН
Т3 = 45 кН
30.
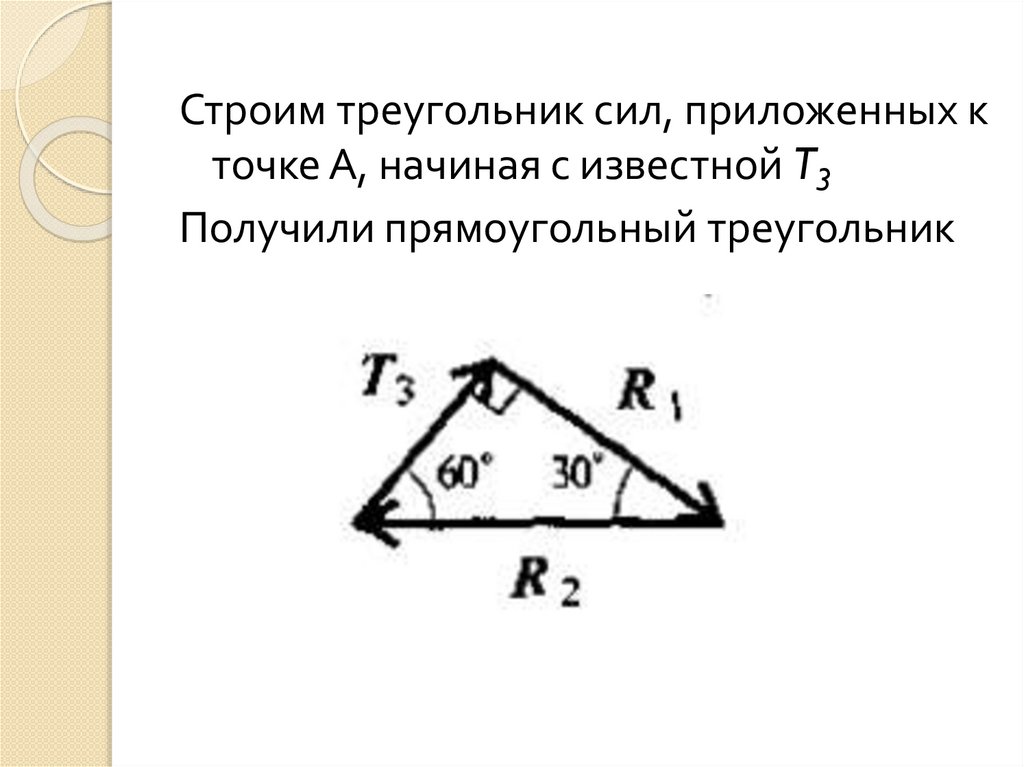
Строим треугольник сил, приложенных кточке А, начиная с известной T3
Получили прямоугольный треугольник
31.
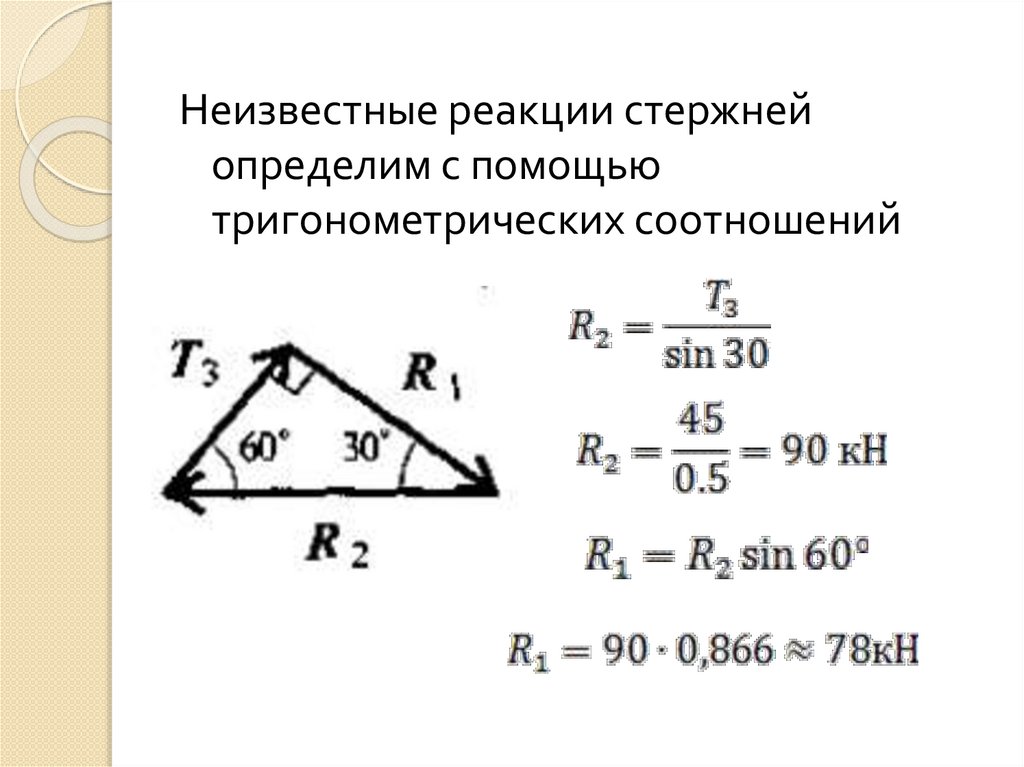
Неизвестные реакции стержнейопределим с помощью
тригонометрических соотношений
32.
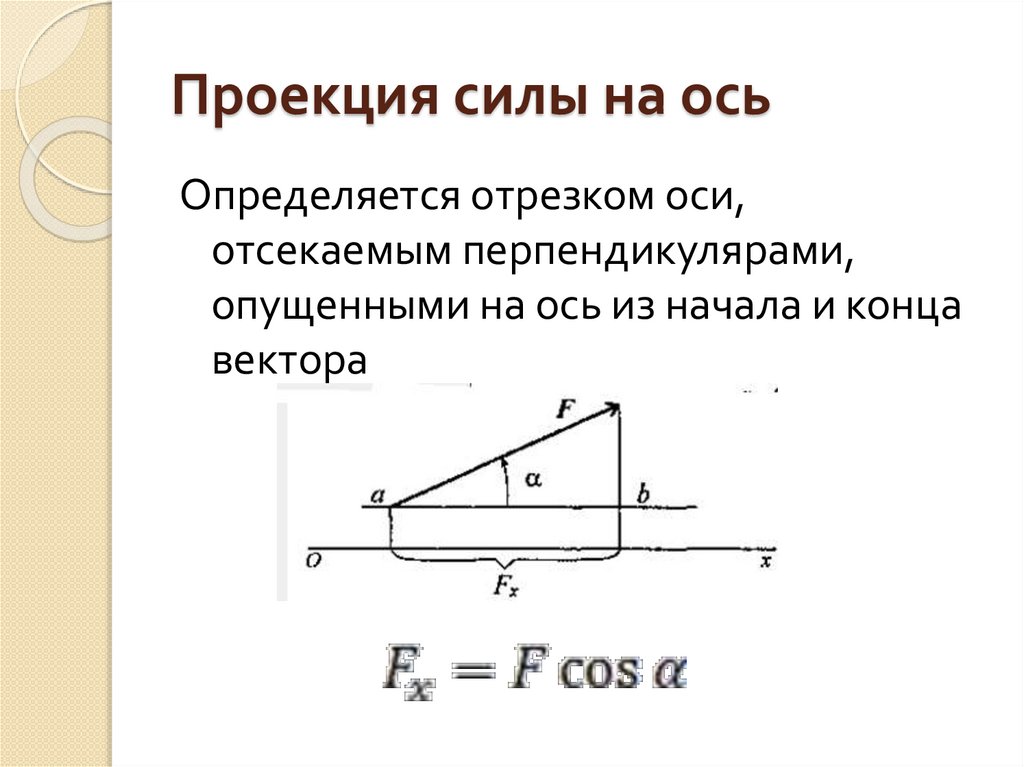
Проекция силы на осьОпределяется отрезком оси,
отсекаемым перпендикулярами,
опущенными на ось из начала и конца
вектора
33.
Знак проекции34.
Знак проекции35.
Проекция силы на 2 взаимноперпендикулярные оси
36.
Выберем систему координатОпределим проекции векторов на оси
37.
Складываем проекции всех векторов наоси
38.
Модуль равнодействующей найдём потеореме Пифагора
Направление равнодействующей по
величинам и знакам косинусов углов
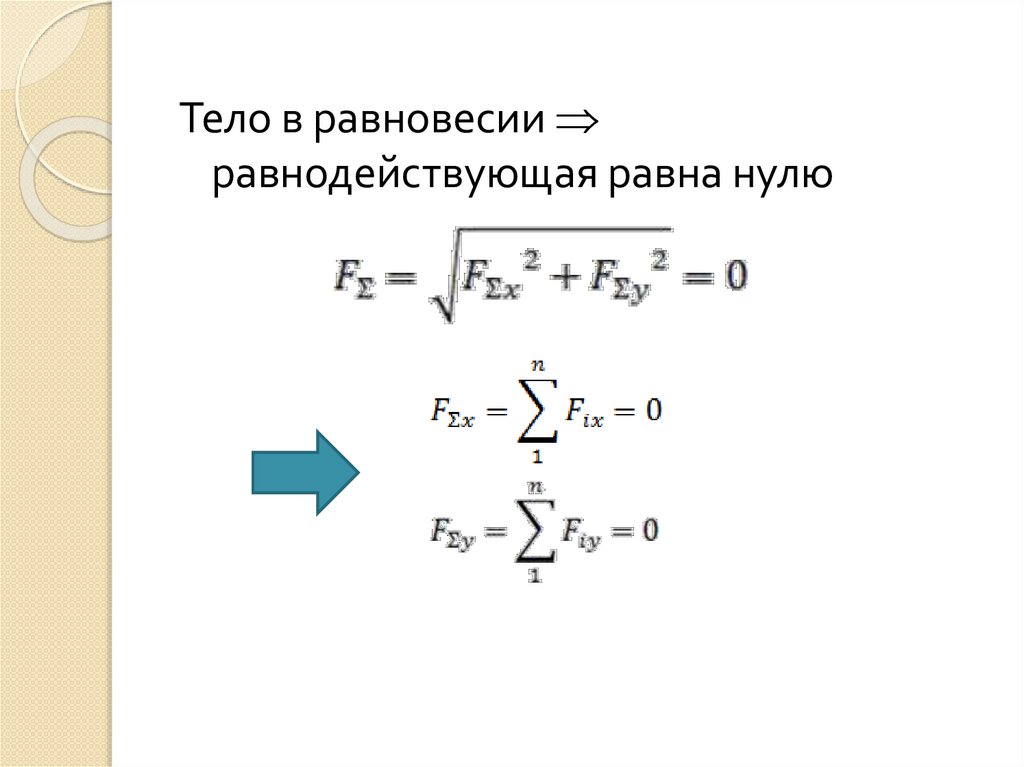
39.
Тело в равновесииравнодействующая равна нулю