
 Военное дело
Военное делоПохожие презентации:
 - эффективное средство в условиях военных действий. Морские беспилотные аппараты")
")

")




 – эффективное средство вооруженной борьбы (основы технической подготовки и связи)")

Беспилотный автономный морской робот
1.
Б еспилотны йавтономны й
морской робот
Беспилотный автономный морской робот - это
высокотехнологичное устройство, которое может действовать в
морской среде без участия человека. Он играет все более значимую
роль в различных областях, таких как океанография, разведка
ресурсов, мониторинг окружающей среды и защита морской
экосистемы.
2.
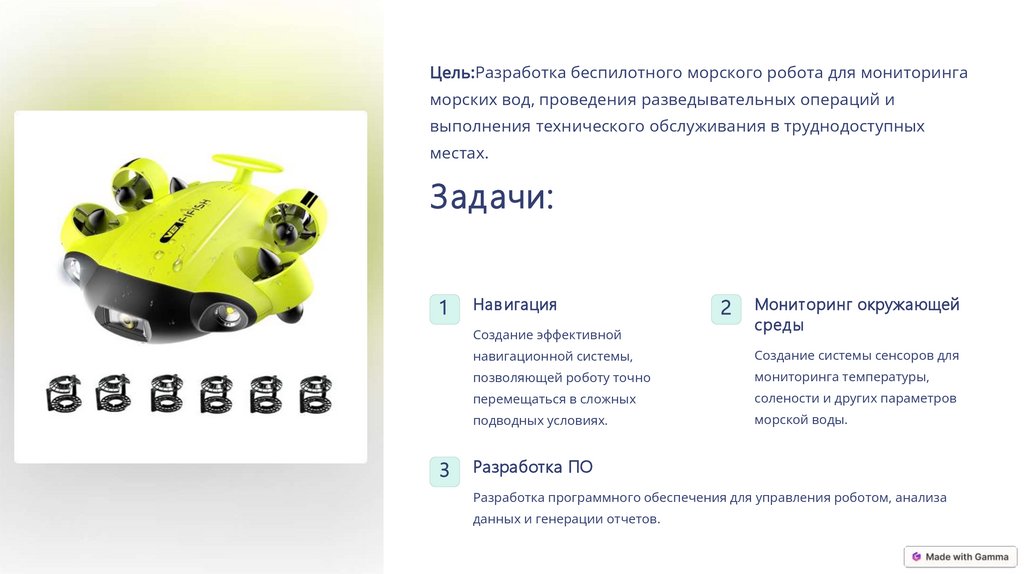
Цель:Разработка беспилотного морского робота для мониторингаморских вод, проведения разведывательных операций и
выполнения технического обслуживания в труднодоступных
местах.
Задачи:
1
Нав игация
Создание эффективной
3
2
Мониторинг окружающей
среды
навигационной системы,
Создание системы сенсоров для
позволяющей роботу точно
мониторинга температуры,
перемещаться в сложных
солености и других параметров
подводных условиях.
морской воды.
Разработка ПО
Разработка программного обеспечения для управления роботом, анализа
данных и генерации отчетов.
3.
Актуальность1
Подводные беспилотные роботы позволяют осуществлять операции в труднодоступных местах,
где традиционные методы недоступны.
2
Значительно увеличивает эффективность исследований и охраны морской среды
3
Улучшает безопасность морских операций и способствует более устойчивому использованию
морских ресурсов
4.
Описание продукта и егопреимущества
Автономная
работа
Высокая
точность и
надежность
Широкий
спектр
применений
без участия
Оснащен
Может
человека, что
передовыми
использоваться
позволяет
сенсорными
для решения
проводить
системами и
широкого круга
исследования в
навигационными
задач в различных
труднодоступных
алгоритмами, что
областях, от
местах.
обеспечивает
океанографии до
высокую точность
разведки ресурсов.
Робот способен
выполнять задачи
сбора данных.
5.
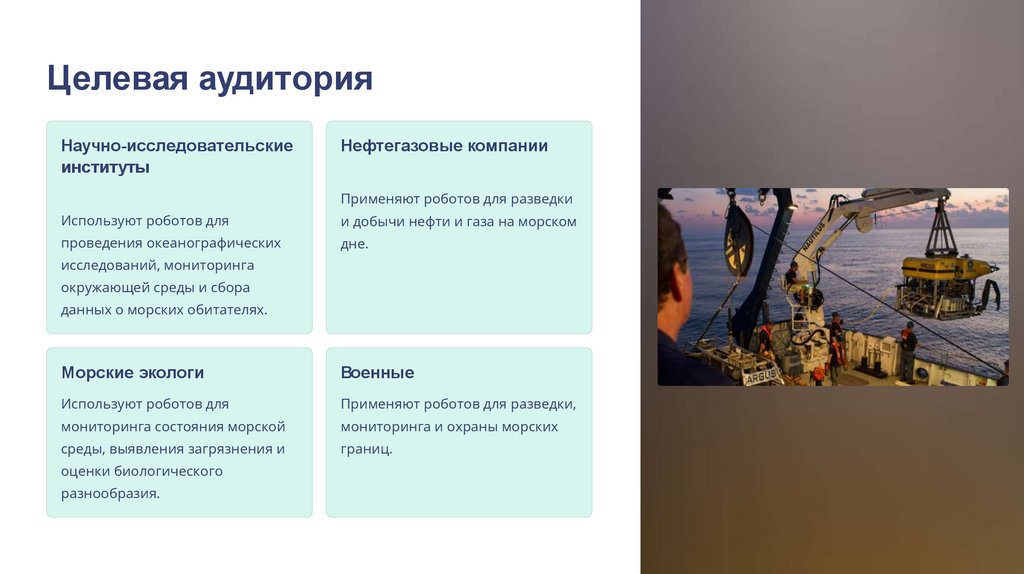
Целевая аудиторияНаучно-исследовательские
институты
Нефтегазовые компании
Применяют роботов для разведки
Используют роботов для
и добычи нефти и газа на морском
проведения океанографических
дне.
исследований, мониторинга
окружающей среды и сбора
данных о морских обитателях.
Морские экологи
Военные
Используют роботов для
Применяют роботов для разведки,
мониторинга состояния морской
мониторинга и охраны морских
среды, выявления загрязнения и
границ.
оценки биологического
разнообразия.
6.
Ры нокЗа последние десять лет интерес к морской робототехнике в нашей стране значительно возрос, что соответствует
мировым трендам в этой области. Это, в первую очередь, связано с тем, что заказчики заинтересованы в таких
решениях, так как они помогают сократить затраты, особенно при необходимости работать в труднодоступных
местах.
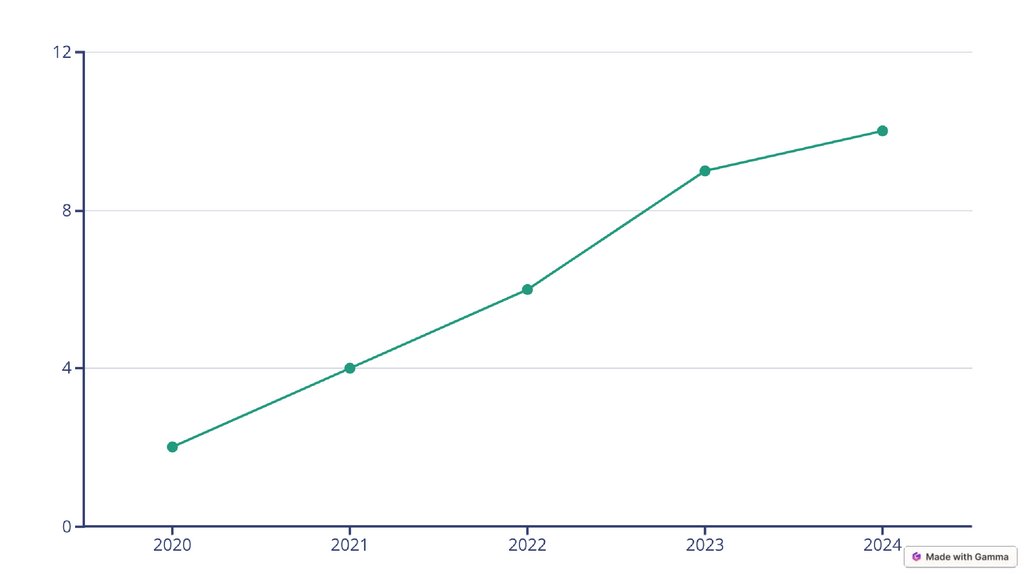
1. Объем рынка: Рынок подводных беспилотных технологий быстро развивается, причем ежегодный рост
превышает 10%.
2. Конкуренция: На рынке существует высокая конкуренция, включая как крупных игроков, так и стартапы,
предлагающие новые и инновационные решения в области подводной робототехники. Множество компаний уже
предлагают готовые технологии для мониторинга и разведки.
3. Тренды: Рынок постепенно переходит к более широкому использованию искусственного интеллекта и
автоматизации обработки данных, что может повысить производительность и эффективность. Также наблюдается
растущий спрос на экологическую безопасность и более устойчивое использование морских ресурсов.
7.
8.
Что было сделано по проекту1.Исследования и анализ требований: Мы провели исследование, чтобы понять, какие именно потребности есть в
мониторинге морских вод и техническом обслуживании в сложных условиях. Также изучили, какие технологии и
инструменты уже существуют на рынке.
2.Проектирование навигационной системы: Мы разработали начальную концепцию навигационной системы,
которая включает алгоритмы для перемещения в подводной среде. Провели моделирование навигационных
алгоритмов и начали первые тесты.
3. Программное обеспечение: Мы начали работу над программным обеспечением, которое будет управлять роботом
и включать аналитические модули для обработки данных. Обсудили основные функции, такие как интерфейс
пользователя, возможность мониторинга в реальном времени и генерации отчетов.
9.
Дал ь нейшая реал изация проекта1.Тестирование прототипов: Мы проведем полевые испытания наших сенсоров и навигационной системы в условиях,
максимально приближенных к реальным. На основании полученных данных мы внесем необходимые
корректировки.
2. Разработка финальной версии оборудования: Мы соберем финальную версию беспилотного робота, интегрировав
все компоненты — навигационную систему, сенсоры и программное обеспечение.
3. Оптимизация программного обеспечения: Мы завершим разработку программного обеспечения, проведем его
тестирование и отладку. Также добавим функцию анализа больших данных для оперативного составления отчетов.
10.
КонтактыПушнин
Щеглов
89277127289
89272177588