 Промышленность
ПромышленностьПохожие презентации:










Методы управления траекторией полета в боковом движении. Автоматическая стабилизация и управление боковым движением
1.
Тема 2.2. Автоматическая стабилизация и управлениебоковым траекторным движением.
Лекция 5. Методы управления траекторией полета в боковом движении
2.6. Основные навигационные параметры бокового движения.
2.7. Методы управления боковым движением ла при полете по маршруту
2.8. САУ курса перекрёстной схемы с учетом угла сноса
2.
2.6. Основные навигационные параметры бокового движенияЛинии пути - это проекция на земную поверхность траектории движения в
пространстве.
Локсодромия- линия на земной сфере, пересекающая меридианы под постоянным
углом. Имеет вид логарифмической спирали, которая при продолжении по сфере
приближается к полюсу. Пользуются при управлении траекторией по магнитному
или индукционному компасу.
Ортодромия – дуга большого круга на земной сфере. Пересекает меридианы под
различными углами. Используется при управлении траекторией
В современных ПНК при автоматизированном самолетовождении на маршруте
можно выделить следующие способы формирования линии заданного пути
(ЛЗП):
- задание координат конечной (для этапа полета) навигационной точки
(НТ) с постановкой задачи выхода в эту точку без учета направления;
- задание ЛЗП координатами двух НТ (в этом случае ЛЗП является
ортодромией на сфере или прямой на плоскости)
- методом зональной навигации.
3.
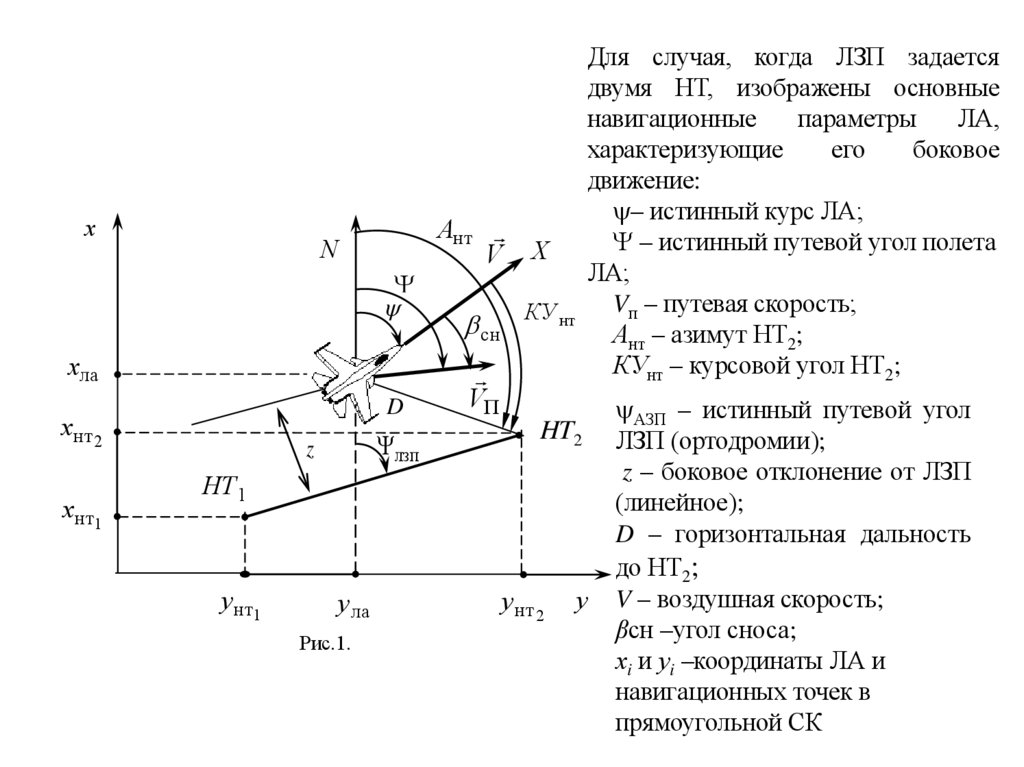
xДля случая, когда ЛЗП задается
двумя НТ, изображены основные
навигационные
параметры
ЛА,
характеризующие
его
боковое
движение:
– истинный курс ЛА;
Aнт
– истинный путевой угол полета
V Х
ЛА;
Vп – путевая скорость;
КУ нт
cн
Ант – азимут НТ2;
КУнт – курсовой угол НТ2;
N
xла
D
xнт 2
xнт1
лзп
z
VП
HT2
НТ1
yнт1
ула
Рис.1.
унт 2
у
АЗП – истинный путевой угол
ЛЗП (ортодромии);
z – боковое отклонение от ЛЗП
(линейное);
D – горизонтальная дальность
до НТ2;
V – воздушная скорость;
βсн –угол сноса;
хi и уi –координаты ЛА и
навигационных точек в
прямоугольной СК
4.
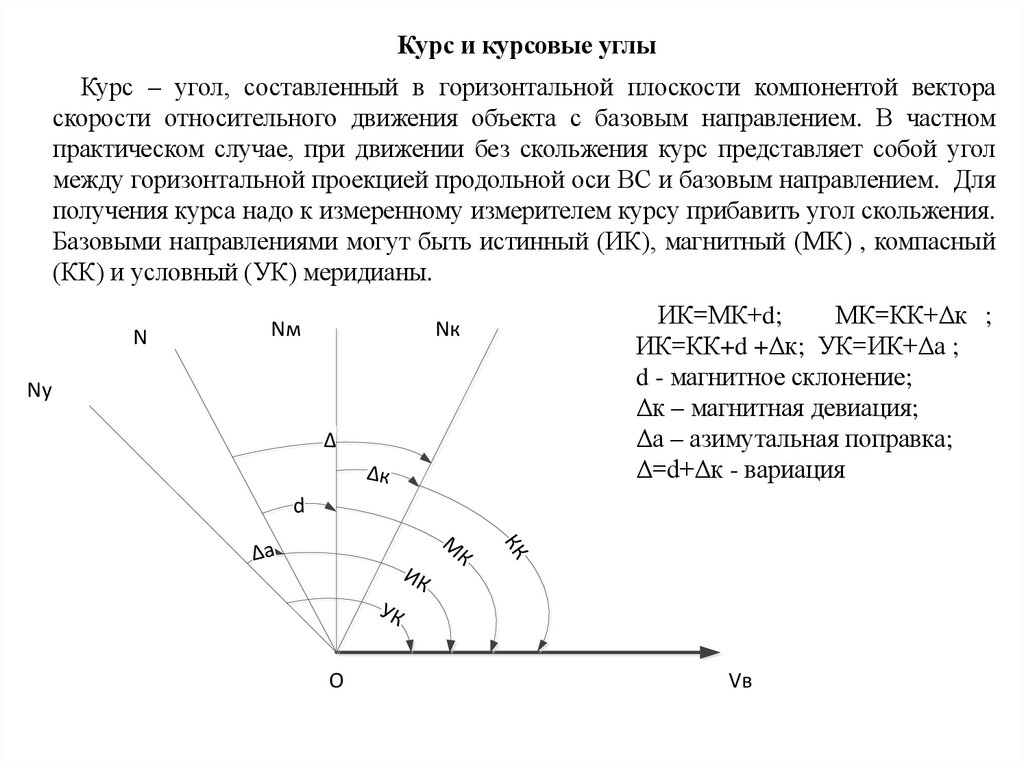
Курс и курсовые углыКурс – угол, составленный в горизонтальной плоскости компонентой вектора
скорости относительного движения объекта с базовым направлением. В частном
практическом случае, при движении без скольжения курс представляет собой угол
между горизонтальной проекцией продольной оси ВС и базовым направлением. Для
получения курса надо к измеренному измерителем курсу прибавить угол скольжения.
Базовыми направлениями могут быть истинный (ИК), магнитный (МК) , компасный
(КК) и условный (УК) меридианы.
N
Nм
ИК=МК+d;
МК=КК+Δк ;
ИК=КК+d +Δк; УК=ИК+Δа ;
d - магнитное склонение;
Δк – магнитная девиация;
Δа – азимутальная поправка;
Δ=d+Δк - вариация
Nк
Ny
Δ
Δк
d
ИК
М
К
КК
Δa
УК
О
Vв
5.
Путевые углы различают по их использованию и получению, т. е. углырасчетные заданные (ЗПУ) и углы фактические (ФПУ), определяемые при
движении объекта. Путевой угол представляется суммой углов курса и углом сноса
ПУ = К + УС.
Формирование программы траекторного движения и предписание движения
объекта при использовании курсовой системы для целей управления движением
по заданной линии пути включают в себя обязательное определение курса
следования;
Курсом следования (КС) называется курс, при котором вектор путевой скорости
VП совпадает с касательной к заданной линии пути (ЗЛП) и соответственно
движение происходит по ЗЛП.
6.
2.7. Методы управления боковым движением ЛА приполете по маршруту
Алгоритм управления ВС при полете по маршруту определяется
методом управления. Используются следующие методы управления при
полете по маршруту:
курсовой;
путевой;
маршрутный;
комбинированный;
зональной навигации.
7.
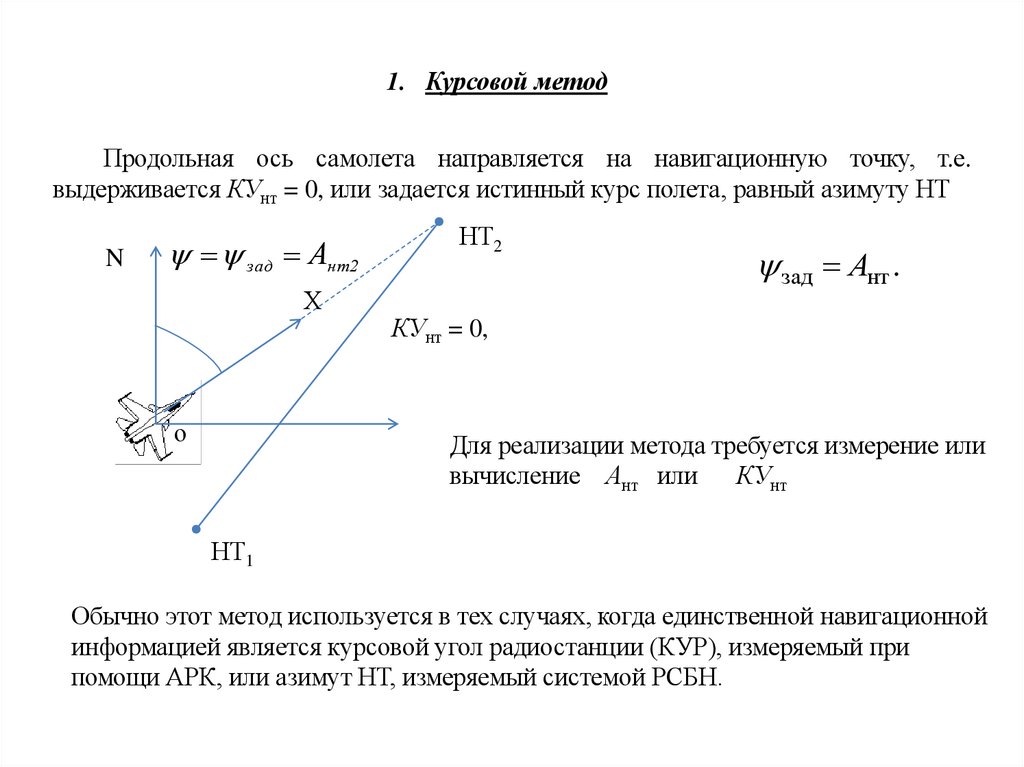
1. Курсовой методПродольная ось самолета направляется на навигационную точку, т.е.
выдерживается КУнт = 0, или задается истинный курс полета, равный азимуту НТ
N
зад Ант2
Х
о
НТ2
зад Ант .
КУнт = 0,
Для реализации метода требуется измерение или
вычисление Ант или КУнт
НТ1
Обычно этот метод используется в тех случаях, когда единственной навигационной
информацией является курсовой угол радиостанции (КУР), измеряемый при
помощи АРК, или азимут НТ, измеряемый системой РСБН.
8.
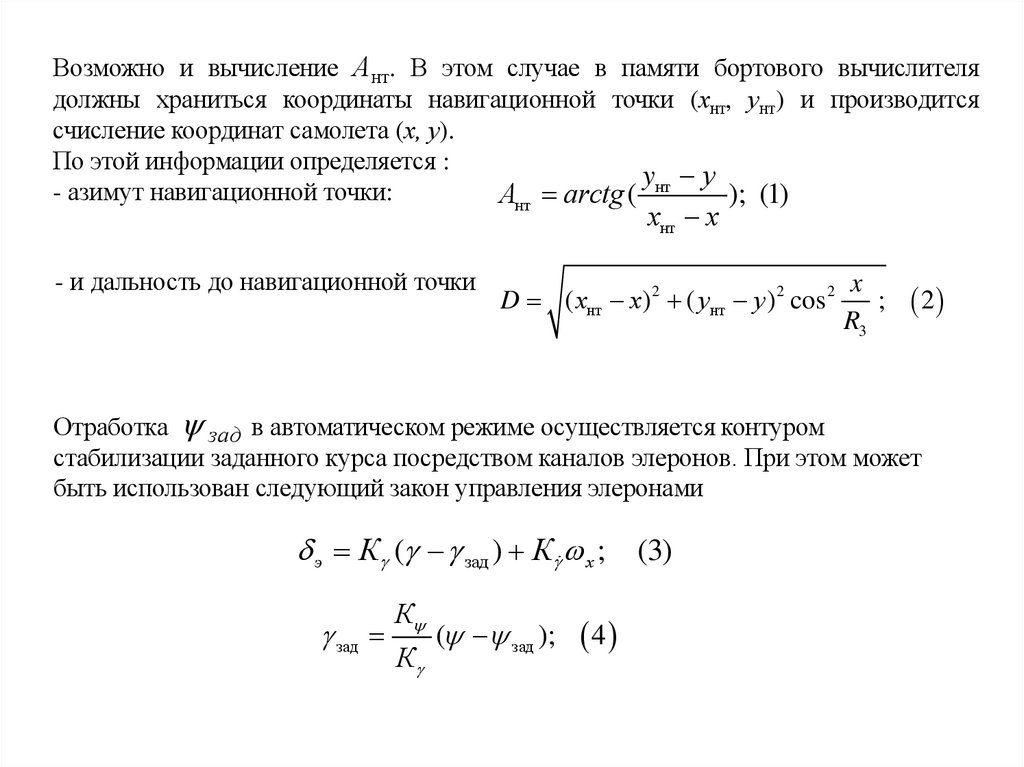
Возможно и вычисление Ант. В этом случае в памяти бортового вычислителядолжны храниться координаты навигационной точки (хнт, унт) и производится
счисление координат самолета (х, у).
По этой информации определяется :
y у
- азимут навигационной точки:
Ант arctg ( нт
); (1)
хнт х
- и дальность до навигационной точки
D ( хнт х) 2 ( унт у ) 2 cos 2
x
;
R3
2
Отработка зад в автоматическом режиме осуществляется контуром
стабилизации заданного курса посредством каналов элеронов. При этом может
быть использован следующий закон управления элеронами
э К ( зад ) К х ; (3)
зад
К
К
( зад );
4
9.
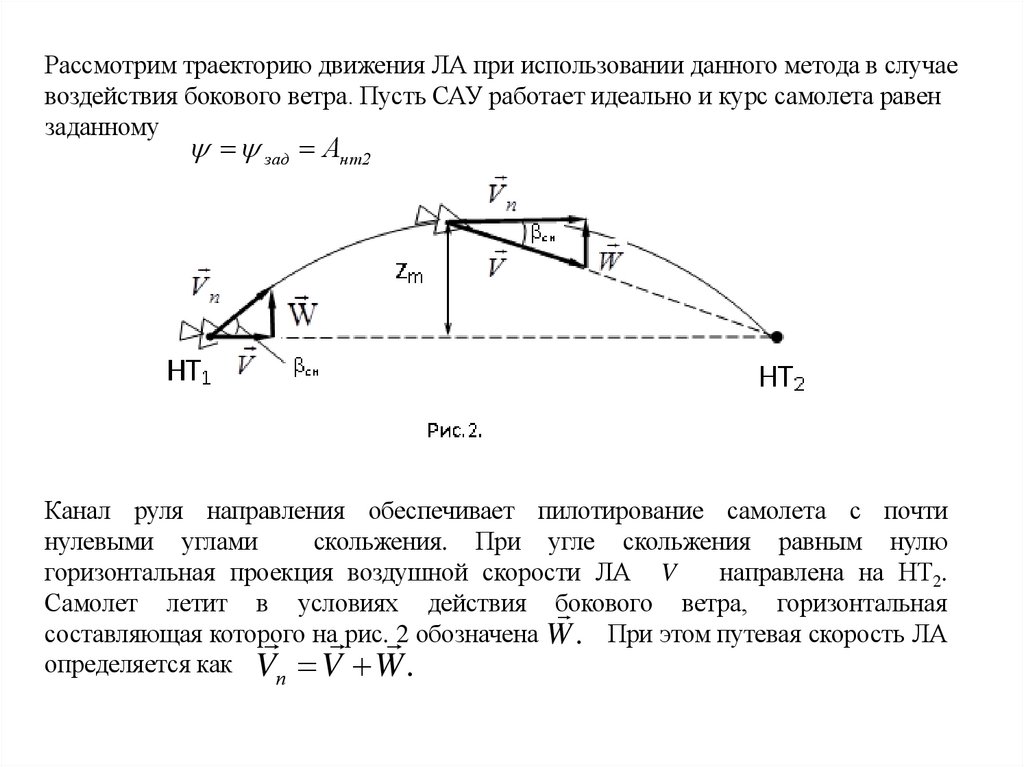
Рассмотрим траекторию движения ЛА при использовании данного метода в случаевоздействия бокового ветра. Пусть САУ работает идеально и курс самолета равен
заданному
зад Ант2
Канал руля направления обеспечивает пилотирование самолета с почти
нулевыми углами
скольжения. При угле скольжения равным нулю
горизонтальная проекция воздушной скорости ЛА V
направлена на НТ2.
Самолет летит в условиях действия бокового
ветра, горизонтальная
составляющая которого
на рис. 2 обозначена W . При этом путевая скорость ЛА
определяется как Vп V W .
10.
2. Путевой методПри этом способе ВС выводится в заданную точку по линии кратчайшего
пути. В отличие от предыдущего способа, здесь управление производится таким
образом, чтобы вектор путевой скорости всегда был направлен на НТ. Заданный курс
для системы автоматического управления формируется в соответствии с выражением
зад Ант сн .
Ант рассчитывается по выражению (1). Значение угла сноса поступает от ДИСС,
либо вычисляется на основе треугольника скоростей по информации от ИНС и СВС.
Отработка зад осуществляется в соответствие с законами, приведенными ранее
К
э К ( зад ) К х , зад ( зад ).
К
В ряде ПНК формируется заданный путевой угол, который при путевом методе
определяется зад Ант .
Путевой метод удобен в случаях, когда ЛА необходимо вывести в заданную точку по
кратчайшему расстоянию. Недостатком способа является не следование ЛА по
заданной ЛЗП в случае, если он по каким либо причинам отклонился от нее
11.
3. Маршрутный метод.12.
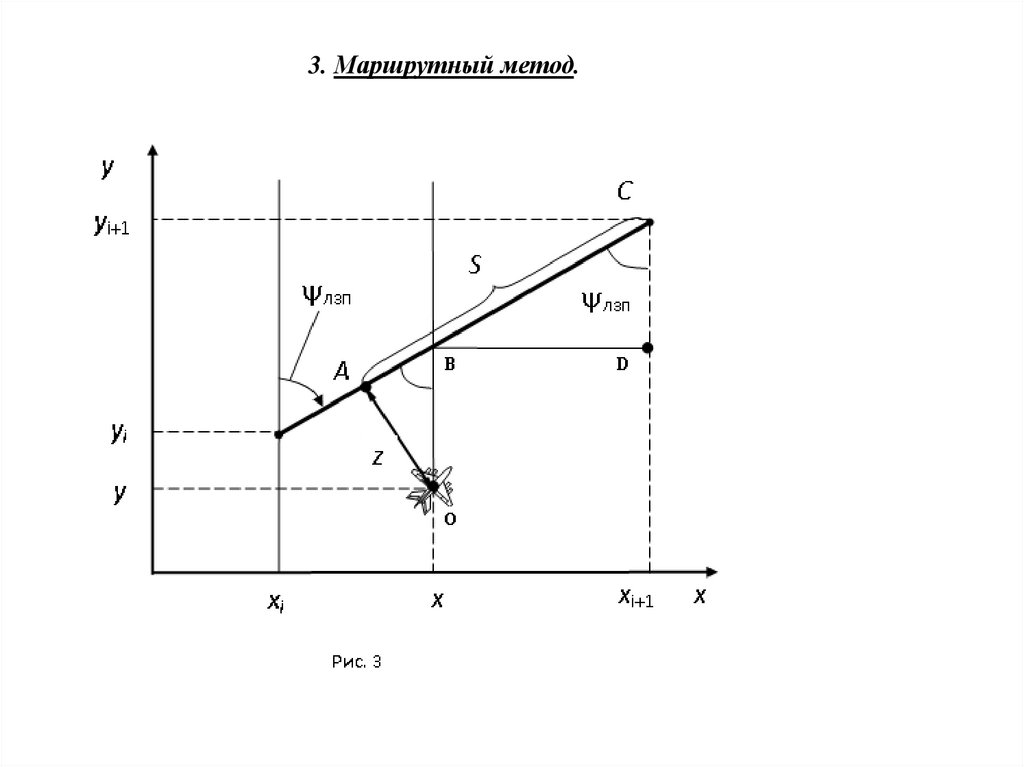
Данный способ управления получил наиболее широкое распространение всовременных ПНК. При этом способе управление осуществляется так, чтобы
обеспечить линейное боковое отклонение z от ЛЗП равным нулю.
Линия заданного пути (частная ортодромия) для отрезка маршрута полета
определяется координатами двух ППМ и ортодромическим путевым углом ЛЗП
(см. рис. 3). Для реализации метода необходимо иметь информацию о линейном
боковом отклонении z. Также для расчета времени полета до очередного ППМ
необходима информация об остаточном расстоянии по ортодромии до очередного
ППМ, обозначенное на рис. 3 буквой S.
Алгоритмы вычисления z и S имеют следующий вид ( из рис.3)
z ( yi 1 y ) sin лзп ( хi 1 x ) соs лзп
S ( xi 1 x ) sin лзп ( уi 1 y ) cos лзп (5) и (6).
Формирование управляющего воздействия САУ происходит по алгоритму (7,8)
Tp
. (7,8)
э К ( зад ) К х , зад К z K z K
Tp 1
z
z
Изодром в цепи сигнала предназначен для обеспечения астатизма контура
управления по отношению к постоянному ветру
13.
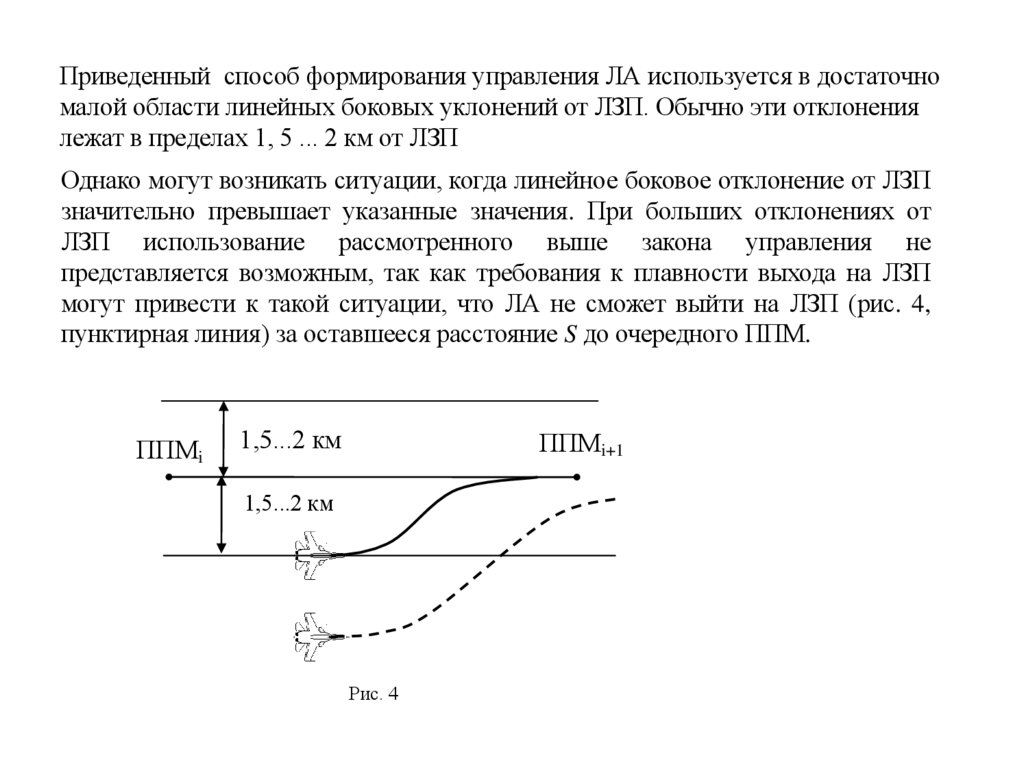
Приведенный способ формирования управления ЛА используется в достаточномалой области линейных боковых уклонений от ЛЗП. Обычно эти отклонения
лежат в пределах 1, 5 ... 2 км от ЛЗП
Однако могут возникать ситуации, когда линейное боковое отклонение от ЛЗП
значительно превышает указанные значения. При больших отклонениях от
ЛЗП использование рассмотренного выше закона управления не
представляется возможным, так как требования к плавности выхода на ЛЗП
могут привести к такой ситуации, что ЛА не сможет выйти на ЛЗП (рис. 4,
пунктирная линия) за оставшееся расстояние S до очередного ППМ.
ППМi
1,5...2 км
ППМi+1
1,5...2 км
Рис. 4
14.
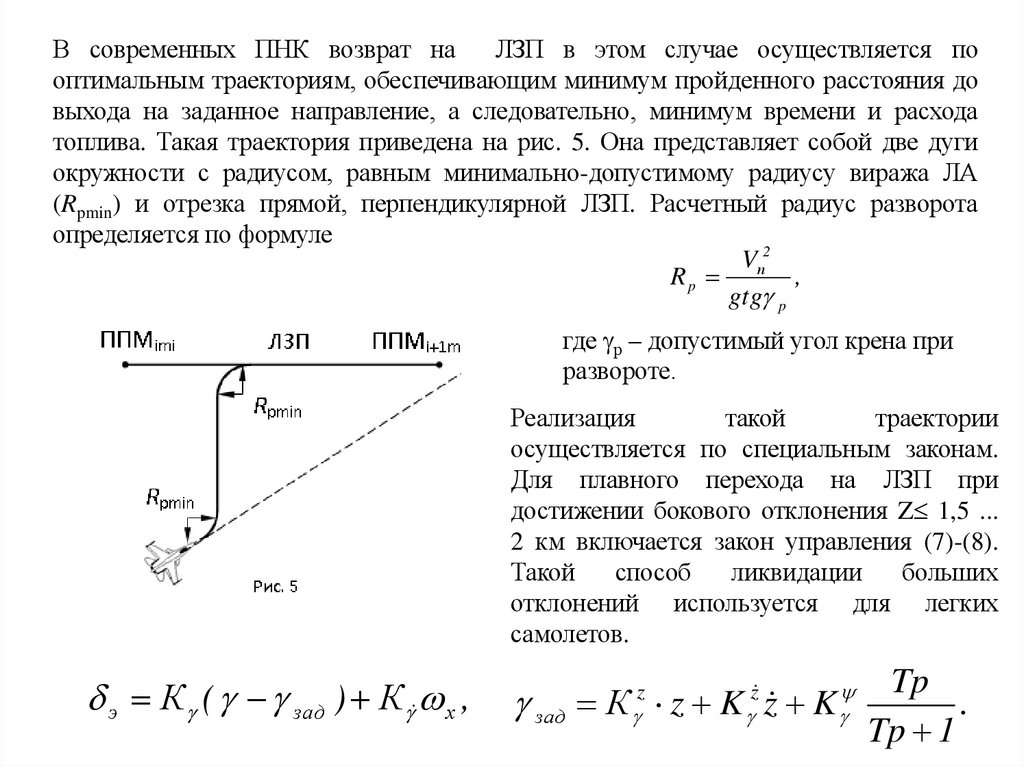
В современных ПНК возврат наЛЗП в этом случае осуществляется по
оптимальным траекториям, обеспечивающим минимум пройденного расстояния до
выхода на заданное направление, а следовательно, минимум времени и расхода
топлива. Такая траектория приведена на рис. 5. Она представляет собой две дуги
окружности с радиусом, равным минимально-допустимому радиусу виража ЛА
(Rpmin) и отрезка прямой, перпендикулярной ЛЗП. Расчетный радиус разворота
определяется по формуле
Vп2
Rp
,
gtg p
где р – допустимый угол крена при
развороте.
Реализация
такой
траектории
осуществляется по специальным законам.
Для плавного перехода на ЛЗП при
достижении бокового отклонения Z 1,5 ...
2 км включается закон управления (7)-(8).
Такой
способ
ликвидации
больших
отклонений используется для легких
самолетов.
э К ( зад ) К х ,
Tp
зад К z K z K
.
Tp 1
z
z
15.
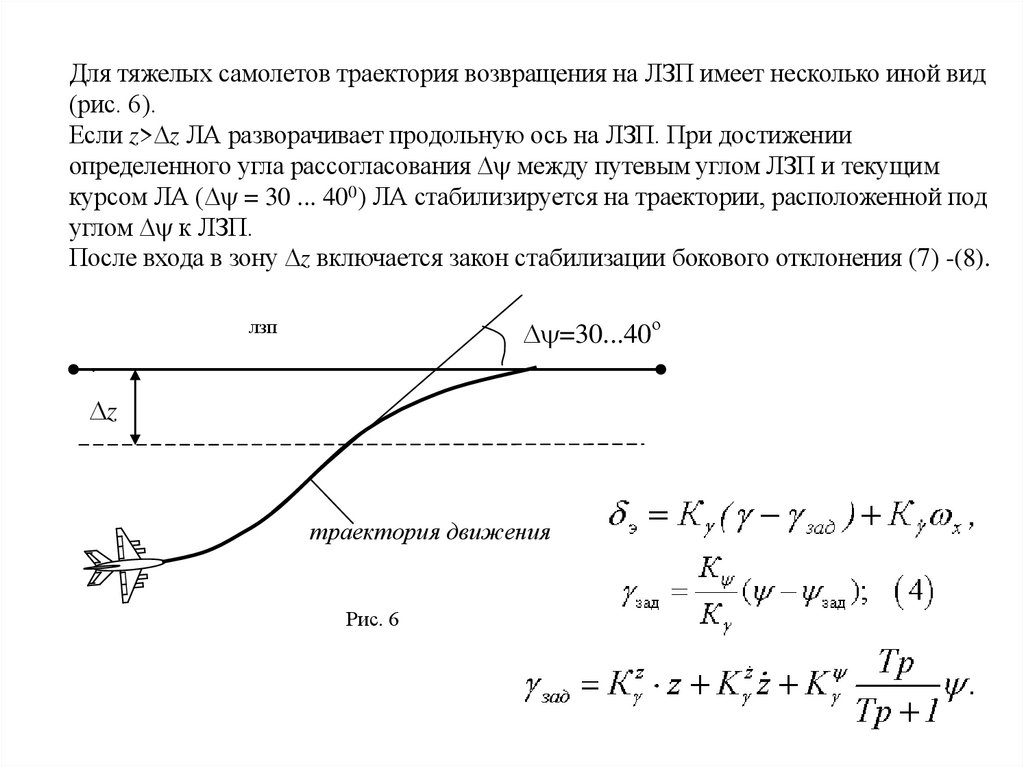
Для тяжелых самолетов траектория возвращения на ЛЗП имеет несколько иной вид(рис. 6).
Если z> z ЛА разворачивает продольную ось на ЛЗП. При достижении
определенного угла рассогласования между путевым углом ЛЗП и текущим
курсом ЛА ( = 30 ... 400) ЛА стабилизируется на траектории, расположенной под
углом к ЛЗП.
После входа в зону z включается закон стабилизации бокового отклонения (7) -(8).
=30...40о
ЛЗП
z
траектория движения
Рис. 6
16.
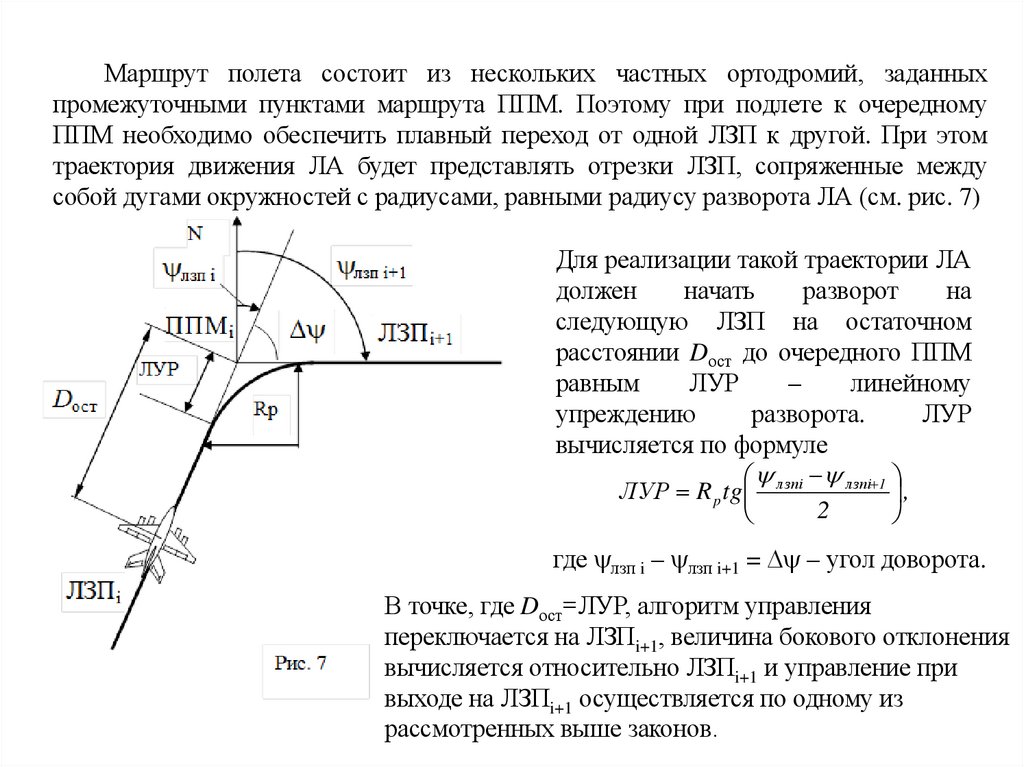
Маршрут полета состоит из нескольких частных ортодромий, заданныхпромежуточными пунктами маршрута ППМ. Поэтому при подлете к очередному
ППМ необходимо обеспечить плавный переход от одной ЛЗП к другой. При этом
траектория движения ЛА будет представлять отрезки ЛЗП, сопряженные между
собой дугами окружностей с радиусами, равными радиусу разворота ЛА (см. рис. 7)
Для реализации такой траектории ЛА
должен
начать
разворот
на
следующую ЛЗП на остаточном
расстоянии Dост до очередного ППМ
равным
ЛУР
–
линейному
упреждению
разворота.
ЛУР
вычисляется по формуле
л зпi 1
ЛУР R p tg л зпi
,
2
где лзп i – лзп i+1 = – угол доворота.
В точке, где Dост=ЛУР, алгоритм управления
переключается на ЛЗПi+1, величина бокового отклонения
вычисляется относительно ЛЗПi+1 и управление при
выходе на ЛЗПi+1 осуществляется по одному из
рассмотренных выше законов.
17.
4. Комбинированный методВ ряде современных ПНК используется метод управления боковым движением,
получившим название комбинированного. Достоинством путевого метода
является то, что ЛА движется к НТ по кратчайшему расстоянию. При
маршрутном способе самолет выходит в очередную НТ по ЛЗП, т.е. с
заданного направления. Комбинированный способ объединяет достоинства
путевого и маршрутного.
Он используется, когда необходимо вывести ЛА на внеочередной ППМ по
кратчайшему пути и с заданного направления.
18.
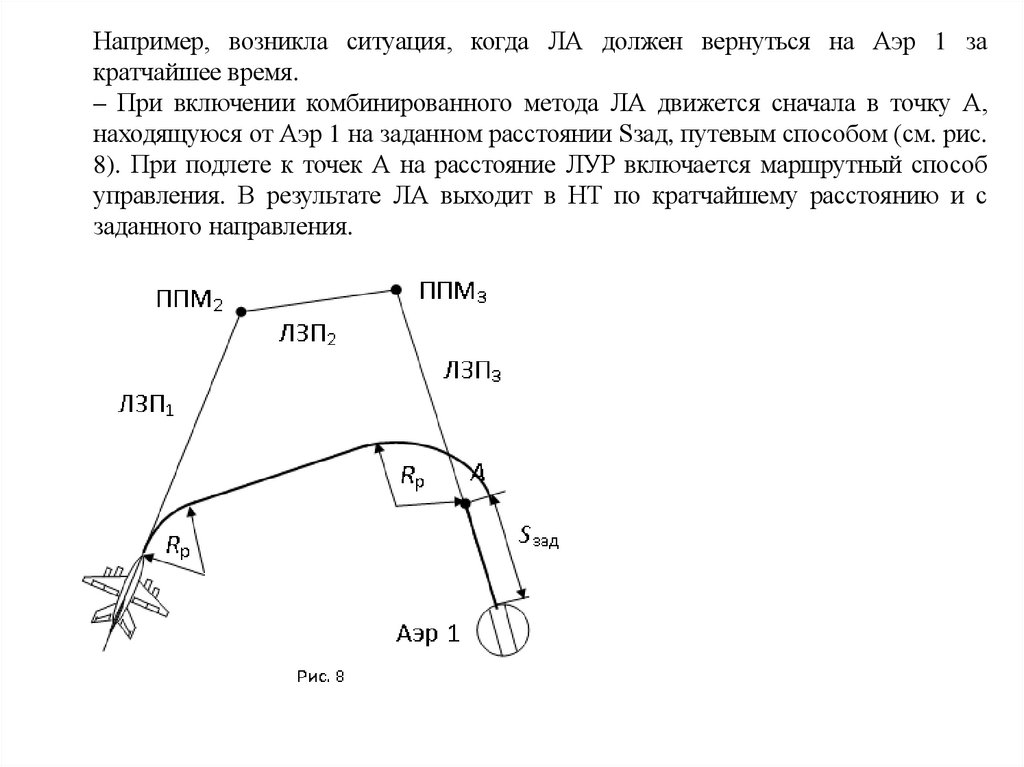
Например, возникла ситуация, когда ЛА должен вернуться на Аэр 1 закратчайшее время.
– При включении комбинированного метода ЛА движется сначала в точку А,
находящуюся от Аэр 1 на заданном расстоянии Sзад, путевым способом (см. рис.
8). При подлете к точек А на расстояние ЛУР включается маршрутный способ
управления. В результате ЛА выходит в НТ по кратчайшему расстоянию и с
заданного направления.
19.
2.8. САУ курса перекрёстной схемы с учетом угла сносаПри длительном полете в условиях действия бокового ветра самолет ”сносится”
ветром с линии заданного пути. Этому не может препятствовать автопилот
курса, который стабилизирует положение продольной оси самолета в
горизонтальной плоскости. Для стабилизации самолета на ЛЗП необходимо
стабилизировать
не продольную ось самолета, а положение вектора путевой
скорости Vп
В этом случае продольная ось самолета должна быть развернута на
встречу ветру на угол сноса (угол упреждения) .
Углом сноса сн называется угол, заключенный
между горизонтальной
проекцией вектора воздушной скорости V и вектором путевой скорости Vп .
Он отсчитывается
вправо (положительный сн ) и влево (отрицательный сн )
от вектора V и определяется как отношение значения
боковой составляющей
ветра Wz к значению воздушной скорости V . Т.е. сн Wz V
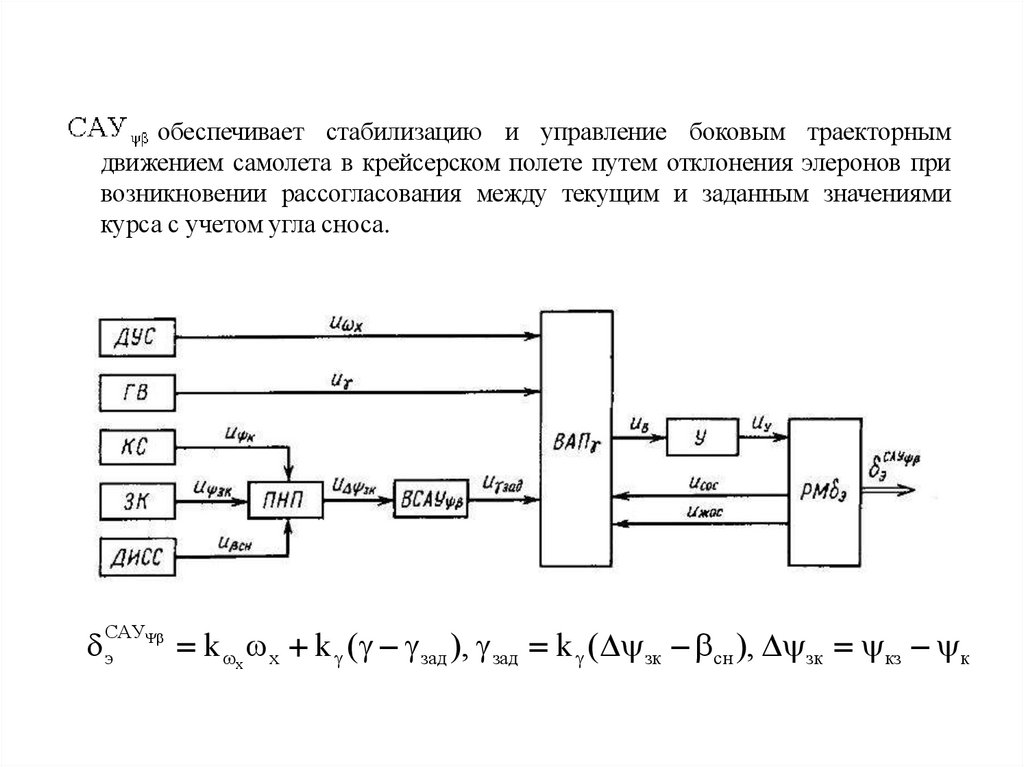
20.
обеспечивает стабилизацию и управление боковым траекторнымдвижением самолета в крейсерском полете путем отклонения элеронов при
возникновении рассогласования между текущим и заданным значениями
курса с учетом угла сноса.
САУ
э
k x x k ( зад ), зад k ( зк сн ), зк кз к
21.
В состав системы входят :- датчик угловой скорости крена ДУС;
- датчик угла крена - гировертикаль ГВ;
- датчик курса - курсовая система КС;
- задатчик курса ЗК;
- датчик угла сноса - доплеровский измеритель скорости и угла сноса ДИСС;
- формирователь рассогласования между текущим и заданным значениями курса с
учетом угла сноса - пилотажно-навигационный прибор ПНП;
- формирователь приращения заданного угла крена - вычислитель ВСАУ ;
- вычислитель автопилота ВАП
;
- усилитель У ;
- рулевая машина РМ э
22.
РАБОТА КОНТУРА САУ. Пусть до включения этого режима САУ работала вавтопилотных режимах стабилизации курса или управления заданным курсом.
Продольная ось самолета удерживалась на ЛЗП, текущий курс самолета равнялся
заданному и u к u зк
После включения режима стабилизации курса с учетом угла сноса при появлении
бокового ветра ДИСС вырабатывает сигнал, пропорциональный возникающему
углу сноса u сн . В результате ПНП формирует сигнал, u зк u зк u к u сн
который в вычислителе ВСАУ преобразуется в сигнал u зад пропорциональный
заданному углу крена. Этот сигнал отрабатывается сервоприводом элеронов.
Самолет входит в крен, пропорциональный углу сноса, и под действием сигнала u
с гировертикали элероны возвращаются в нейтральное положение. Самолет
начинает разворачиваться в сторону действия ветра до тех пор, пока разность
сигналов u зк u к не уравновесит сигнал u сн
Тогда сигнал с ПНП станет равным нулю u 0
и под действием
зк
сигнала с гировертикали u сервопривод отклонит элероны в обратную сторону.
Самолет выйдет из крена и продолжит прямолинейное движение без угла сноса.