 Промышленность
ПромышленностьПохожие презентации:










Автоматическое управления бокового движения при заходе на посадку. Лекция 10
1.
Раздел № 3 УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ПРИЗАХОДЕ НА ПОСАДКУ
Тема 3.1. Директорное и автоматическое управление боковым
траекторным движением при заходе на посадку.
Лекция 10. Автоматическое управления
бокового движения при заходе на посадку
ЛИТЕРАТУРА
1. [1] стр. 361-371
2.
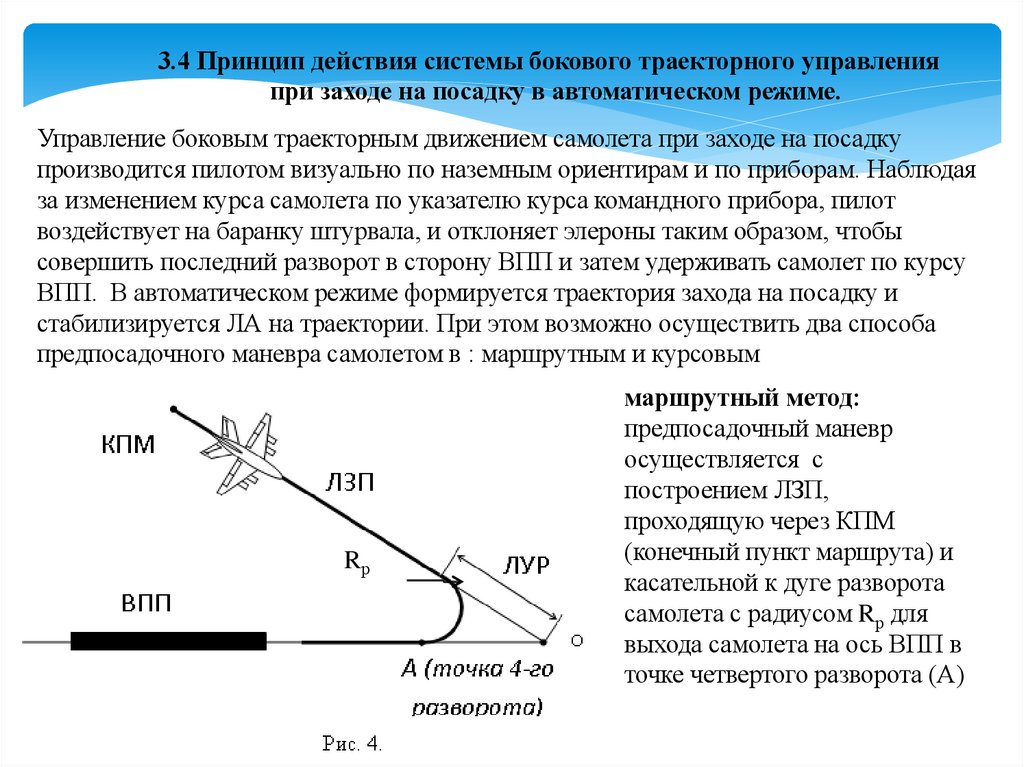
3.4 Принцип действия системы бокового траекторного управленияпри заходе на посадку в автоматическом режиме.
Управление боковым траекторным движением самолета при заходе на посадку
производится пилотом визуально по наземным ориентирам и по приборам. Наблюдая
за изменением курса самолета по указателю курса командного прибора, пилот
воздействует на баранку штурвала, и отклоняет элероны таким образом, чтобы
совершить последний разворот в сторону ВПП и затем удерживать самолет по курсу
ВПП. В автоматическом режиме формируется траектория захода на посадку и
стабилизируется ЛА на траектории. При этом возможно осуществить два способа
предпосадочного маневра самолетом в : маршрутным и курсовым
Rр
маршрутный метод:
предпосадочный маневр
осуществляется с
построением ЛЗП,
проходящую через КПМ
(конечный пункт маршрута) и
касательной к дуге разворота
самолета с радиусом Rр для
выхода самолета на ось ВПП в
точке четвертого разворота (А)
3.
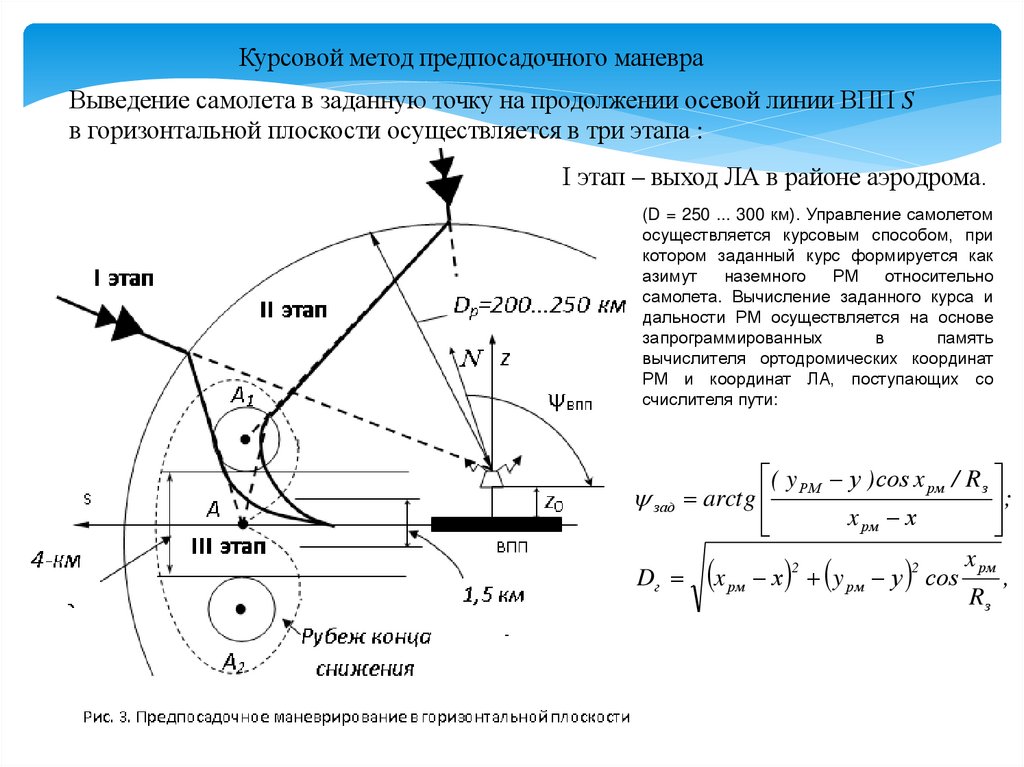
Курсовой метод предпосадочного маневраВыведение самолета в заданную точку на продолжении осевой линии ВПП S
в горизонтальной плоскости осуществляется в три этапа :
I этап – выход ЛА в районе аэродрома.
(D = 250 ... 300 км). Управление самолетом
осуществляется курсовым способом, при
котором заданный курс формируется как
азимут
наземного
РМ
относительно
самолета. Вычисление заданного курса и
дальности РМ осуществляется на основе
запрограммированных
в
память
вычислителя ортодромических координат
РМ и координат ЛА, поступающих со
счислителя пути:
( y РМ у ) сos x рм / R з
;
x рм х
x рм
2
2
Dг x рм х y рм у сos
,
Rз
зад arctg
4.
II этап («возврат радийный») включается автоматически при появленииустойчивого сигнала от наземного РМ.
Заданный курс формируется в
зависимости от направления выхода, как азимут одной из 3-х специальных
точек (см. рис. 3):
- А – точка четвертого разворота с координатами Sзад = 21 км; zзад = 0;
- А1, А2 – точки третьего разворота с координатами Sзад = 21 км;
zзад = 2Rp, Rp = 4 км – радиус разворота.
По информации от РМ блок вычисления посадки определяет текущие координаты
самолета в системе координат, связанной с ВПП (S и z) и по ним вычисляется зад
, который поступает в САУ (или КПП) для управления ЛА в боковом канале .
III этап: начинается, когда ЛА подойдет к выбранной точке (А1, А2, А) на
расстояние 4 км. При входе ЛА в 4 км зону точки А, последняя перестает быть
фиксированной и передвигается вместе с самолетом на расстоянии 2,5 км
впереди от него. При этом самолет описывает кривую погони. При входе
самолета в 1,5 км коридор заканчивается третий этап и включается режим
захода на посадку.
5.
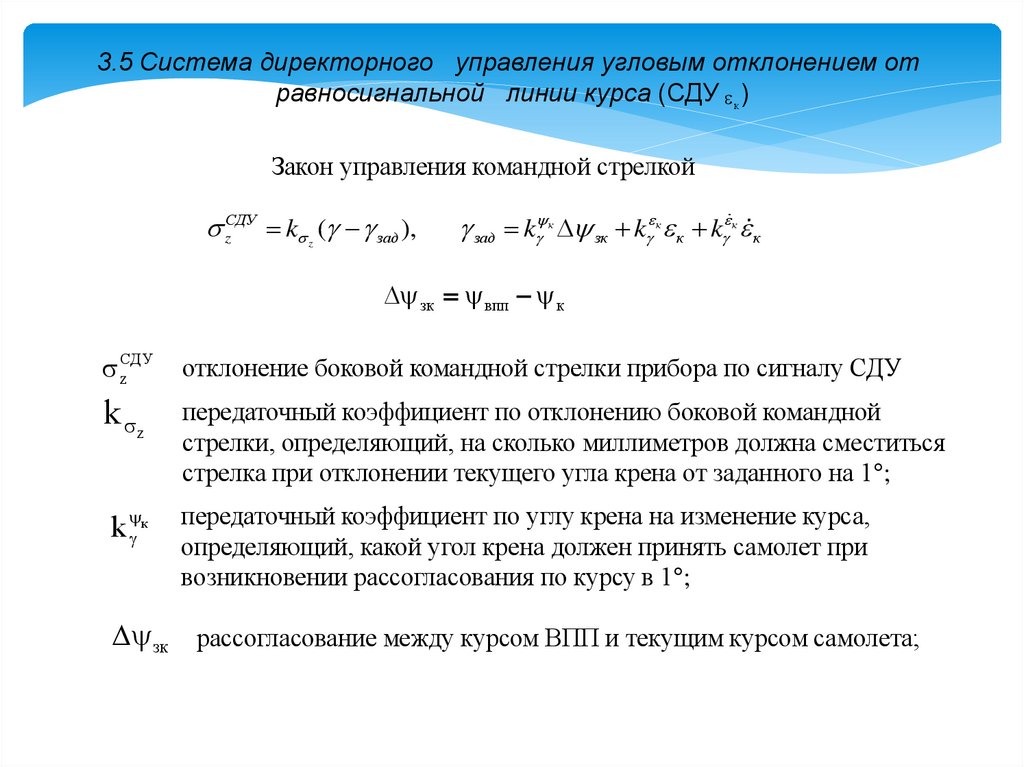
3.5 Система директорного управления угловым отклонением отравносигнальной линии курса (СДУ к)
Закон управления командной стрелкой
zСДУ k ( зад ),
z
зад k зк k к k к
к
к
к
зк впп к
СДУ
z
отклонение боковой командной стрелки прибора по сигналу СДУ
k z
передаточный коэффициент по отклонению боковой командной
стрелки, определяющий, на сколько миллиметров должна сместиться
стрелка при отклонении текущего угла крена от заданного на 1°;
k к
передаточный коэффициент по углу крена на изменение курса,
определяющий, какой угол крена должен принять самолет при
возникновении рассогласования по курсу в 1°;
зк рассогласование между курсом ВПП и текущим курсом самолета;
6.
передаточные коэффициенты по углу крена соответственно наугловое отклонение самолета от равносигнальной линии курса и на
скорость этого отклонения, определяющий, какой угол крена должен
принять самолет при возникновении рассогласования по угловому
отклонение и скорости углового отклонения самолета от
равносигнальной линии курса в 1° и в 1 °/сек соответственно.
в
к к
соответственно угловое отклонение и скорость углового
отклонения самолета от равносигнальной линии курса.
7.
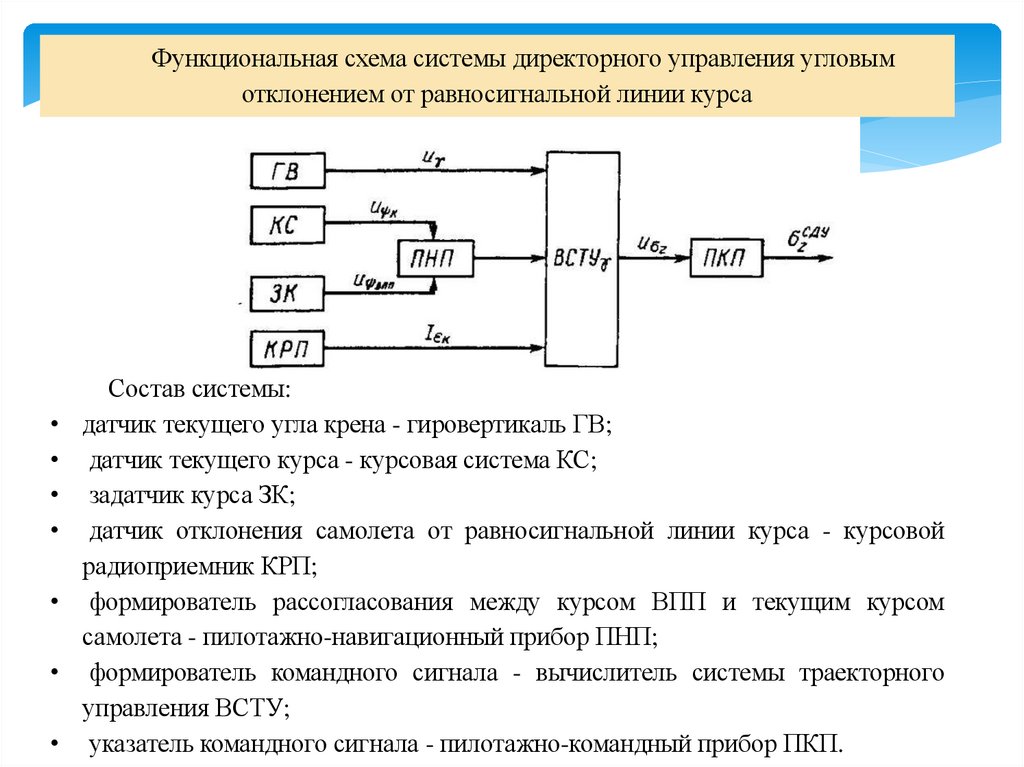
Функциональная схема системы директорного управления угловымотклонением от равносигнальной линии курса
Состав системы:
датчик текущего угла крена - гировертикаль ГВ;
датчик текущего курса - курсовая система КС;
задатчик курса ЗК;
датчик отклонения самолета от равносигнальной линии курса - курсовой
радиоприемник КРП;
формирователь рассогласования между курсом ВПП и текущим курсом
самолета - пилотажно-навигационный прибор ПНП;
формирователь командного сигнала - вычислитель системы траекторного
управления ВСТУ;
указатель командного сигнала - пилотажно-командный прибор ПКП.
8.
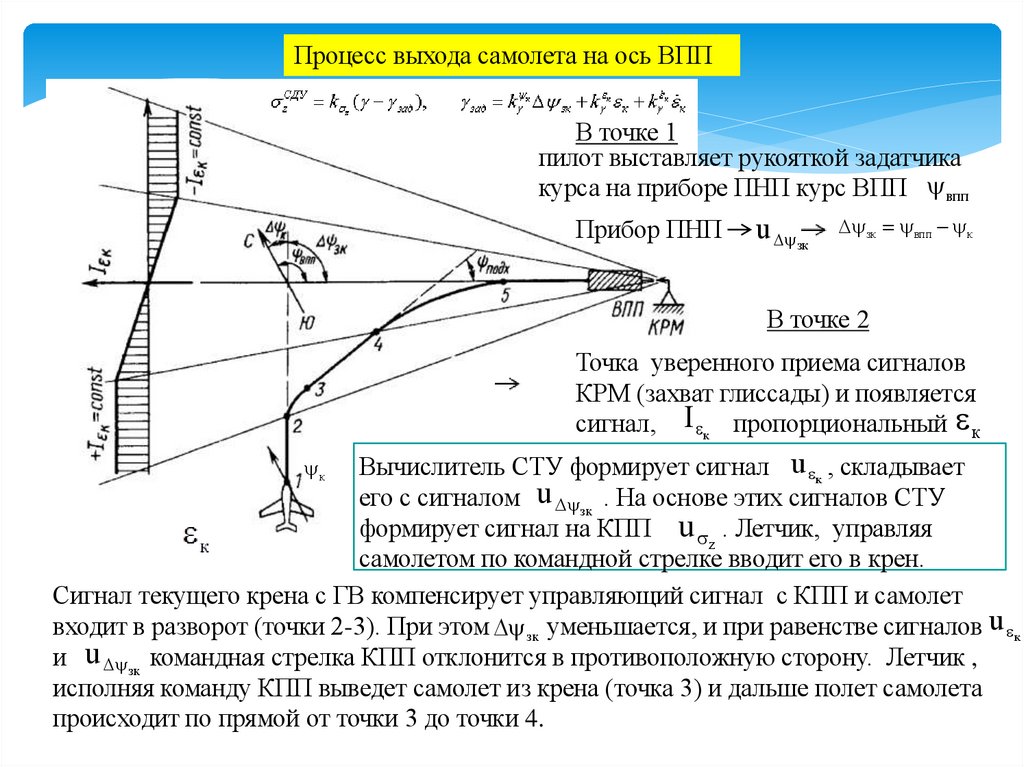
Процесс выхода самолета на ось ВППВ точке 1
пилот выставляет рукояткой задатчика
курса на приборе ПНП курс ВПП впп
Прибор ПНП
u зк
зк впп к
В точке 2
Точка уверенного приема сигналов
КРМ (захват глиссады) и появляется
сигнал, I к пропорциональный к
Вычислитель СТУ формирует сигнал u к , складывает
его с сигналом u зк . На основе этих сигналов СТУ
формирует сигнал на КПП u z . Летчик, управляя
самолетом по командной стрелке вводит его в крен.
Сигнал текущего крена с ГВ компенсирует управляющий сигнал с КПП и самолет
входит в разворот (точки 2-3). При этом зк уменьшается, и при равенстве сигналов u к
и u зк командная стрелка КПП отклонится в противоположную сторону. Летчик ,
исполняя команду КПП выведет самолет из крена (точка 3) и дальше полет самолета
происходит по прямой от точки 3 до точки 4.
к
9.
Значение угла подхода подх, с которым самолет приближается к ВПП,выбирается в пределах 28-30°. В точке 4, когда самолет входит в зону линейного
изменения сигнала к сигнал зк отключается
Для устранения колебаний самолета в ЗУ вводится сигнал, пропорциональный
скорости углового отклонения самолета от равносигнальной линии u к
С приближением к оси ВПП знак u к противоположен знаку u и наоборот.
к
Тогда в точке 4
Сигнал по скорости u будет превышать сигнал u ка по знаку ему противоположен.
к
Командная стрелка отклонится вправо, пилот вводит самолет в правый крен,
стрелка восстанавливается в нейтральное положение, самолет выводится из крена.
Постепенно сигналы отклонения и скорости отклонения от курсовой зоны
станут нулевыми и самолет плавно впишется в створ ВПП.
10.
При заходе на посадку с боковым ветром самолет отклоняется от оси ВПП.За счет возникающих при этом сигналов u и u к на командную стрелку
к
выдается команда, выполняя которую, пилот разворачивает самолет в сторону оси
ВПП. В результате возникает отклонение от заданного курса ВПП зк . Когда это
отклонение будет равно углу сноса, самолет прекратит отклонение от оси ВПП и
сигнал u к уравновесится сигналом по курсу. В этом случае пилоту будет выдана
команда на вывод самолета из крена и самолет будет двигаться параллельно оси
ВПП со статической ошибкой, пропорциональной боковой составляющей скорости
ветра. Поэтому целесообразно в зоне небольших углов курса отключать сигнал u зк
Функцию демпфирования угловых колебаний самолета в режиме
директорного управления выполняет система улучшения устойчивости и
управляемости через сервопривод, последовательно подключенный в проводку
управления элеронами.
11.
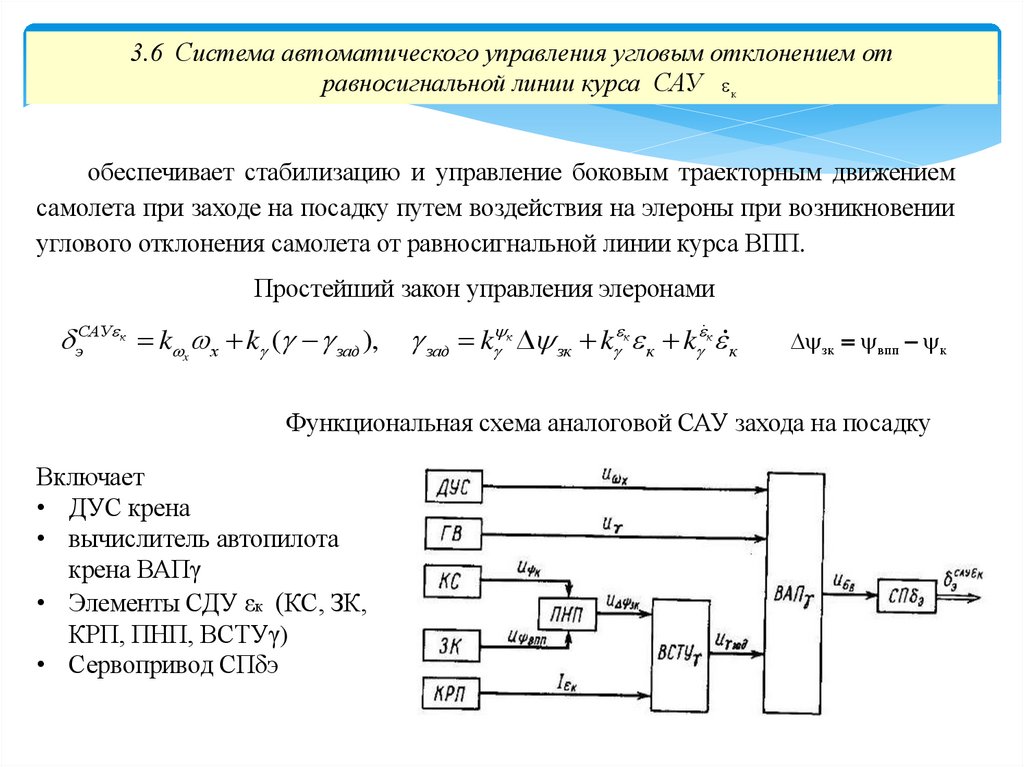
3.6 Система автоматического управления угловым отклонением отравносигнальной линии курса САУ к
обеспечивает стабилизацию и управление боковым траекторным движением
самолета при заходе на посадку путем воздействия на элероны при возникновении
углового отклонения самолета от равносигнальной линии курса ВПП.
Простейший закон управления элеронами
эСАУ k x k ( зад ),
к
x
зад k зк k к k к
к
к
к
зк впп к
Функциональная схема аналоговой САУ захода на посадку
Включает
• ДУС крена
• вычислитель автопилота
крена ВАПγ
• Элементы СДУ εк (КС, ЗК,
КРП, ПНП, ВСТУγ)
• Сервопривод СПδэ
к
12.
Особенности законов управлениядиректорного захода на посадку .
систем
автоматического
Наиболее целесообразной координатой управления боковым движением самолета
является угол крена. Это объясняется, во-первых, тем, что в этом случае контур
директорного управления содержит интегрирующее звено, во-вторых, тем, что из
условий безопасности полета самолета на значение угла крена накладываются
жесткие ограничения, которые необходимо соблюдать в условиях близости земли.
Поэтому командный сигнал, выдаваемый пилоту на директорный прибор, является
СТ У
функцией заданного значения угла крена зад
1. Отклонение командной стрелки от среднего положения указывает на
необходимость изменения крена таким образом, чтобы стрелка вернулась в
среднее положение.
k z выбирают из условий обеспечения максимального удобства пилоту и
ограничения заданных кренов.
Максимальное отклонение командной стрелки на ПКП составляет 20-30 мм.
Допустимые значения углов крена 20-30°. Поэтому обычно выбирают k z =0,5-1,5
мм/°.
Закон управления СДУ к с учетом ПФ пилота и СШУ имеет вид:
СДУ
СДУ
W
(
p
)
W
(
p
)
э
п
сшу
z
и
13.
задпропорциональное управление только по сигналу
к
не обеспечивает демпфирование траекторных колебаний самолета относительно
равносигнальной линии курса. Более того, по мере приближения к КРМ период
траекторных колебаний уменьшается и становится сопоставимым с периодом угловых
колебаний по крену. Это приводит к тому, что эффективность траекторного управления
посредством создания крена существенно падает и сам процесс вывода самолета на ось
ВПП становится неустойчивым. Для борьбы с этим явлением, очевидно, необходимо в
закон формирования сигнала заданного крена ввести информацию о скорости углового
отклонения самолета от равносигнальной линии курса к
2. Вместо информации об угловом отклонении самолета от равносигнальной линии
курса предпочтительным было бы использование сигнала линейного отклонения
z Dкрм tg к Dкрм к
k к
k к
Dкрм D0 Vt
необходимо изменять по мере приближения к ВПП
14.
Первый способ коррекции основывается на ослаблении сигнала, снимаемого с КРМ помере приближения к нему самолета функции дальности
k к f ( Dкрм )
k к f ( Dкрм )
Второй способ коррекции передаточных коэффициентов, основывающийся на
косвенном использовании информации о дальности путем использования
информации о высоте полета.
Коррекция осуществляется непрерывно по сигналам с радиовысотомера или
дискретно через определенные промежутки времени, связанные с моментом
«захвата» глиссады, прохождением маяков и т.д.
Непрерывная коррекция передаточных коэффициентов по дальности или высоте
позволяет обеспечить более точное выдерживание заданной траектории полета.
Однако решение такой задачи имеет определенные технические сложности.
15.
3. Вследствие разброса крутизны сигнала РТСSi
из-за различной геометрии расположения КРМ относительно ВПП, различной
длины ВПП, влияния эксплуатационных факторов.
Ток на выходе КРП, зависит от
к и от крутизны Si (Ii Si к )
При проектировании СТУ принимают некоторую расчетную крутизну
Si расч
Коэффициент, учитывающий отличие фактической крутизны сигнала РТС от
' ''
расчетной:
k s Si / Si расч k s k s
k s'
коэффициент, учитывающий разброс крутизны, вызванный
различиями в длине ВПП и расстоянии от КРМ до ВПП;
=0,6 1,4
k s''
коэффициент, учитывающий разброс крутизны, вызванный
нестабильностью характеристик РТС
0,65 1,35.
16.
4. Наличие высокочастотной составляющей помехи fв сигнале
существенно затрудняет процесс пилотирования самолета при заходе на
посадку.
Фильтрация на выходе КРМ и на входе СТУ
зад
kф
Тфp 1
к
[k к к k к к ]
Физического датчика, измеряющего скорость углового отклонения к
на
борту самолета от равносигнальной линии курса не существует, приходится
дифференцировать сигнал к
При этом относительный уровень помех существенно увеличивается.
Необходимо ввести еще один апериодический фильтр с постоянной времени
зад
kф
Тф p 1
[k к к k к
Т ф2 p
Т ф2 p 1
к ]
Тф2
17.
Уменьшив действие высокочастотной составляющей помехи с помощьюфильтров, мы ввели запаздывание в сигнал
зад
Мера по компенсации этого запаздывания - организация операционных
сглаживающих фильтров:
на вход апериодического фильтра помимо полезного сигнала с помехой подать
его производную, то на выходе фильтра мы будем иметь сигнал без временной
задержки и ослабленный сигнал помех :
(u u f )
1
1
1
Tpu
u
uf
Tp 1
Tp 1
Tp 1
18.
5. На этапе захода на посадку предъявляются очень жесткие требования кточности выдерживания траектории. Поэтому необходимо обеспечить
астатичность управления по отношению к боковому ветру, возмущающим
моментам
Добиться частичного астатизма от действия бокового ветра можно, если
известны угол сноса и скорость ветра. Тогда экипаж вводит в ПНП поправку
к заданному курсу ВПП и тем самым частично компенсирует влияние
бокового ветра
к
зад k к к k к к k ( зк сн )
19.
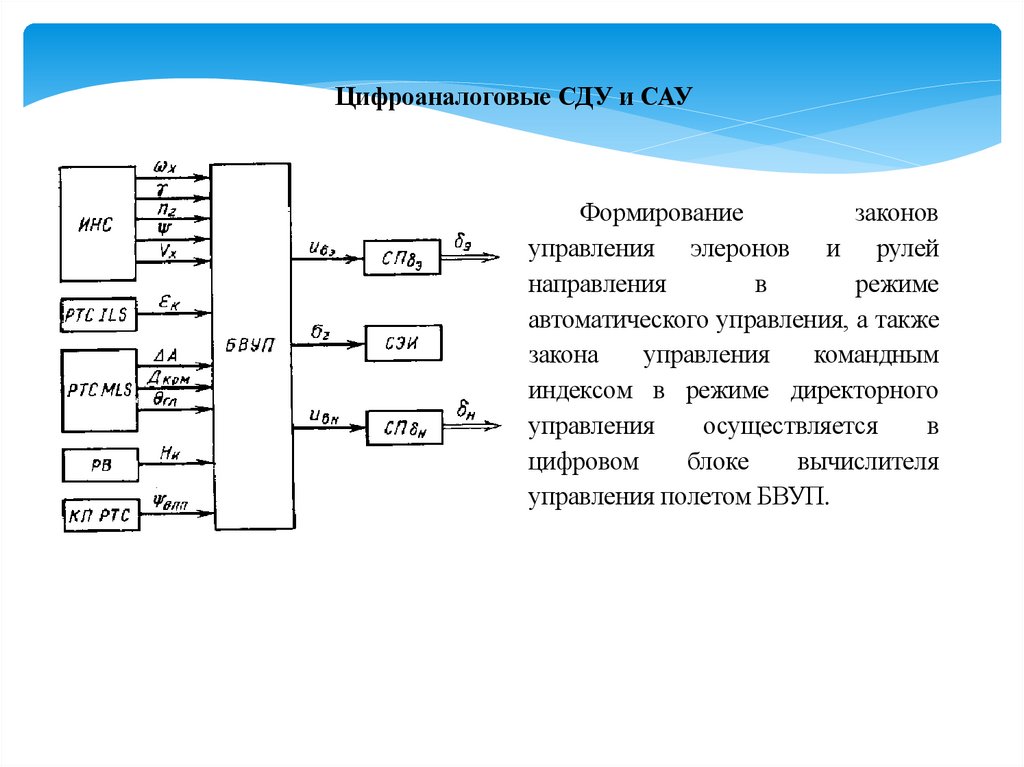
Цифроаналоговые СДУ и САУФормирование
законов
управления элеронов и рулей
направления
в
режиме
автоматического управления, а также
закона
управления
командным
индексом в режиме директорного
управления
осуществляется
в
цифровом
блоке
вычислителя
управления полетом БВУП.
20.
Можно обеспечить астатизм введением в закон управлениясигнала, пропорционального интегралу углового отклонения от
равносигнальной линии курса
k
к
зад k к к k к к
к
p
Введение в закон управления положительной обратной связи по
заданному крену
зад k к к k к к k зад зад
21.
Особенностью режимов ДЗП и АЗП в боковом канале является наличие трехвариантов управления:
Первый вариант - без комплексирования информации по сигналам РТС СП/ILS и ИНС
задаваемый угол крена сформирован на основе двух сигналов к и
( впп )
Второй вариант алгоритма управления в фазе стабилизации самолета на курсовой
линии кроме сигналов
и
используется информация о высоте Н и для
формирования сигнала пропорционального линейному отклонению от оси ВПП z,
а также информация о скорости полета Vx для формирования сигнала,
пропорционального скорости линейного отклонения z
Третий вариант алгоритма управления в качестве информации о боковом
отклонении z использует сигналы A , Dкрм и гл . Сигнал, пропорциональный
z, формируется так же, как во втором варианте алгоритма, сигнал,
пропорциональный ( впп ) также, как в первом варианте.