
































")
 Электроника
ЭлектроникаПохожие презентации:



")

")
")



Спутниковые радионавигационные системы
1.
Спутниковыерадионавигационные системы
2.
1. Общие сведения о спутниковых РНССпутниковыми называются РНС, в которых источники
информации (радиомаяки) размещены на навигационных
спутниках (НС).
ССН
комплекс
взаимодействующих
радиоэлектронных средств, расположенных на НС, наземных
пунктах
и
аппаратура
потребителей
(приемники),
предназначенные для определения трех пространственных
координат (широты B, долготы L и высоты H), трех
составляющих вектора полной скорости и точного времени.
3.
Основой ССН является сеть (созвездие) НС, выполняющихроль подвижных радиомаяков с известными координатами и
скоростью, относительно которых измеряются навигационные
параметры в аппаратуре потребителей.
Использование НС в качестве источников навигационной
информации стало возможным благодаря исключительно
высокой точности определения и контроля координат и
параметров
движения
НС
на
момент
выполнения
навигационных определений потребителем, а также глобальная
рабочая зона.
4.
ССН первого поколенияTRANSIT (NAVSAT Navy Navigation Satellite System) (1964 г.,
США) - первая в мире навигационная спутниковая система
CIKLON (CIKADA-M) (1967 г., СССР) – аналог TRANSIT.
Системы предназначались для навигации подводных
лодок и навигационного обеспечения пусков с них
баллистических ракет, но впоследствии использовались и в
коммерческих целях.
5.
ВССН
первого
поколения
применялись
спутники,
расположенные на низких круговых полярных орбитах (Н≈1100 км,
Тобр≈107 мин). При таких параметрах орбит спутник находился в
зоне видимости не более 40 мин.
В состав орбитальной группировки входило 6-7 спутников и
только один находился в зоне видимости.
Для определения координат потребителя выполнялись сеансы
измерений доплеровского сдвига частоты сигналов, принимаемых
от спутника.
На основе этого путем достаточно сложных вычислений и
последовательных итераций за несколько сеансов измерения
доплеровского сдвига частоты сигнала определялись неизвестные
координаты потребителя.
Координаты потребителя определялись с дискретностью 1-2
часа в средних широтах и несколько часов – в экваториальной
зоне. Точность – хуже 200 м для высокодинамичных
потребителей.
6.
Для непрерывности и высокой точности навигационныхопределений требовалось увеличить время нахождения спутника в
зоне видимости, количество спутников, по которым могли
выполняться одновременные измерения и использовать другие
принципы определения координат.
Это могло быть обеспечено при увеличении радиуса орбиты
и состава орбитальной группировки, использовании других
типов сигналов и методов определения навигационных параметров.
При этом потребовалось решить ряд проблем:
обеспечить взаимную синхронизацию сигналов (шкал времени)
спутников с необходимой точностью;
повысить точность определения и прогнозирования параметров
орбит спутников;
обеспечить раздельный прием сигналов от одновременно
наблюдаемых спутников;
обеспечить возможность приема и обработки сигналов малой
мощности от спутников на фоне естественных шумов вблизи
земной поверхности.
7.
ССН второго поколенияGPS (1994 г.) (Global Positioning System) - глобальная
система позиционирования.
NAVSTAR GPS (NAVigation Satellites providing Time
And Range).
8.
ГЛОНАСС (1995 г.) - Глобальная НавигационнаяСпутниковая Система.
9.
Официальную информацию о состоянии орбитальныхгруппировок ГЛОНАСС и GPS, данные оперативного
мониторинга точности позиционирования и много другой
полезной информации можно найти на сайтах:
Информационно-аналитического
(ИАЦ)
https://www.glonass-iac.ru/
центра
ГЛОНАСС
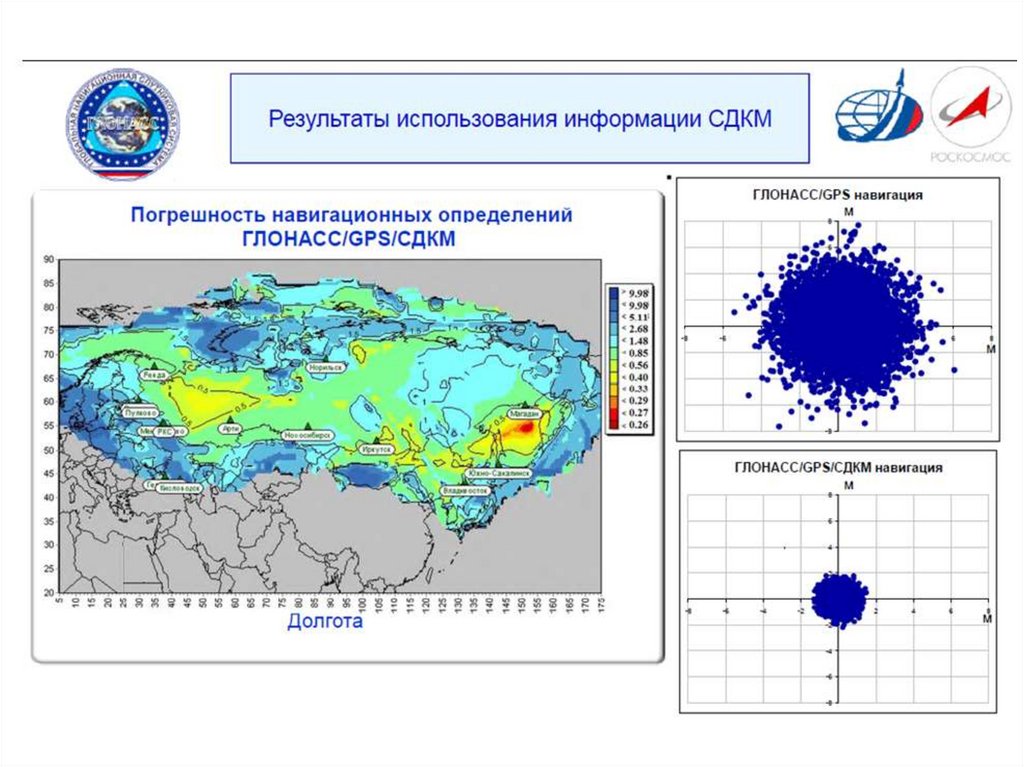
Российской системы дифференциальной коррекции и
мониторинга (СДКМ)
http://www.sdcm.ru/
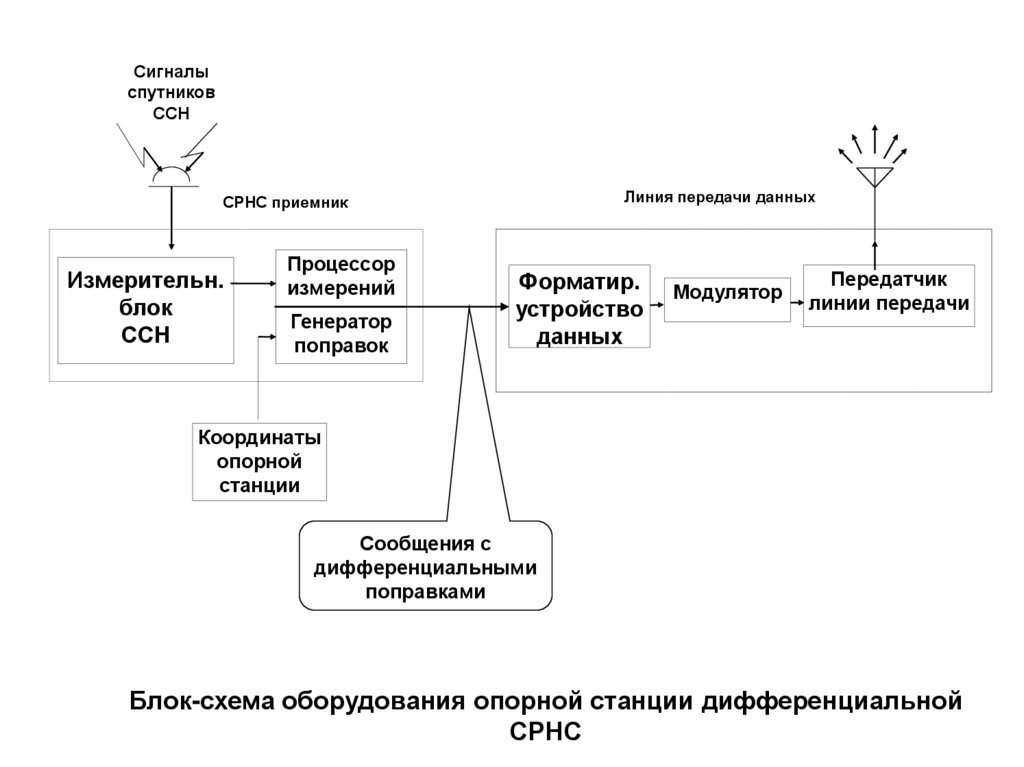
10.
11.
Спутник GPS12.
Спутник ГЛОНАСС-МСпутник ГЛОНАСС-К
13.
14.
15.
Характеристики НС ГЛОНАСС16.
GALILEO - создается с целью обеспечения Европысобственной независимой глобальной навигационной системой
гражданского применения и создания конкуренции, в первую
очередь с GPS.
На 16.04.2019 г. в составе ОГ 27 НС
17.
Бэйдоу (Compass) («Большая медведица») (Китай) запущена вкоммерческую эксплуатацию в декабре 2012 г. как региональная
(азиатско-тихоокеанская) система позиционирования.
Система развернута полностью с августа 2020г.
18.
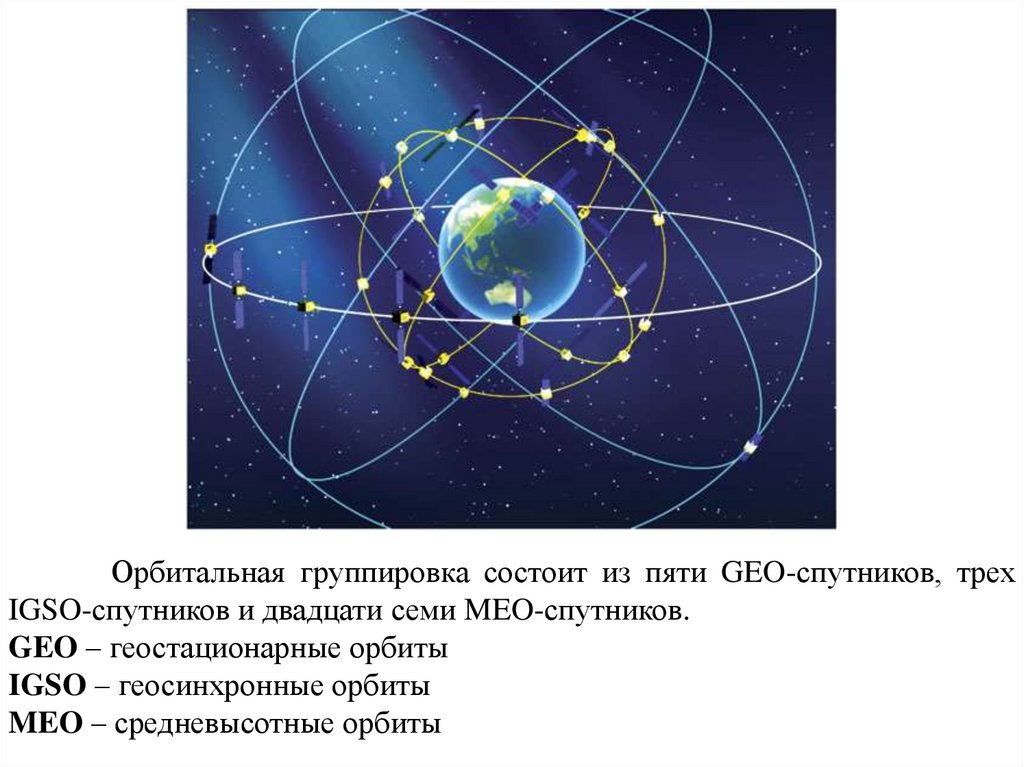
Орбитальная группировка состоит из пяти GEO-спутников, трехIGSO-спутников и двадцати семи MEO-спутников.
GEO – геостационарные орбиты
IGSO – геосинхронные орбиты
MEO – средневысотные орбиты
19.
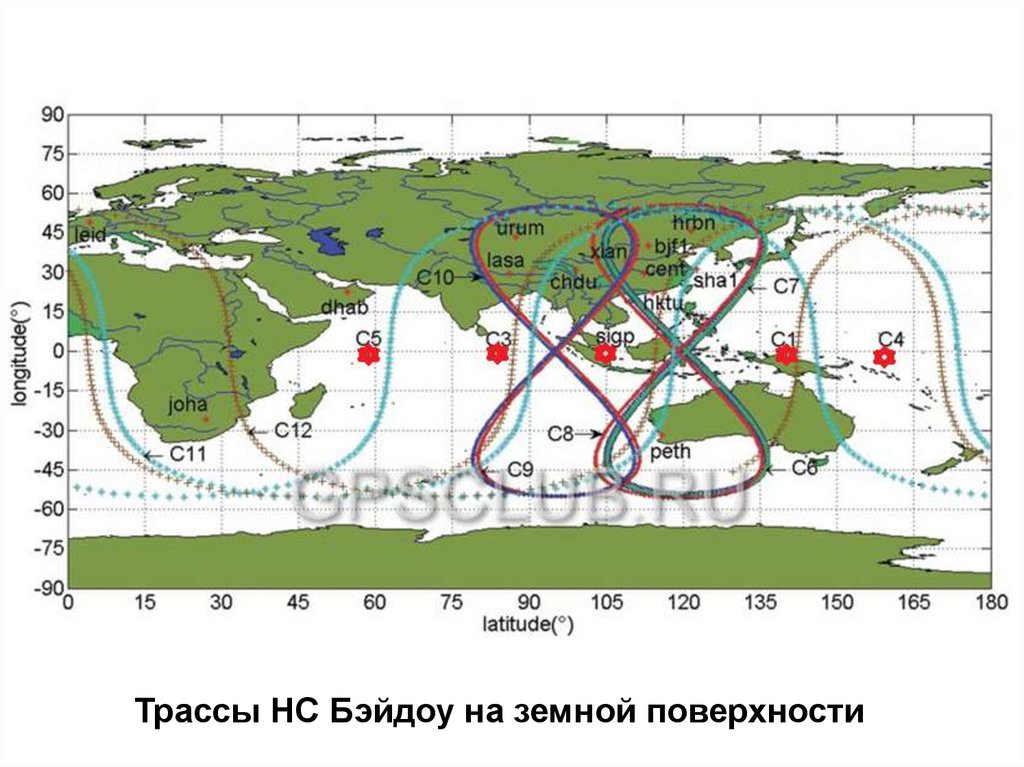
Трассы НС Бэйдоу на земной поверхности20.
IRNSS- индийская спутниковая региональная система
навигации.
Проект одобрен правительством Индии в 2006 г.
Первый спутник IRNSS-1A был запущен 1 июля 2013 года.
Система покроет территорию субконтинента и еще расстояние
около 1,5 тыс. км от его границ с погрешностью менее 10 м.
Всего в состав орбитальной группировки должны входить 7
спутников.
QZSS - японская региональная Quasi-Zenith навигационная
система.
Проект одобрен в 2002 г. Первый спутник запущен в 2010г.
21.
2. Параметры орбитальных группировок22.
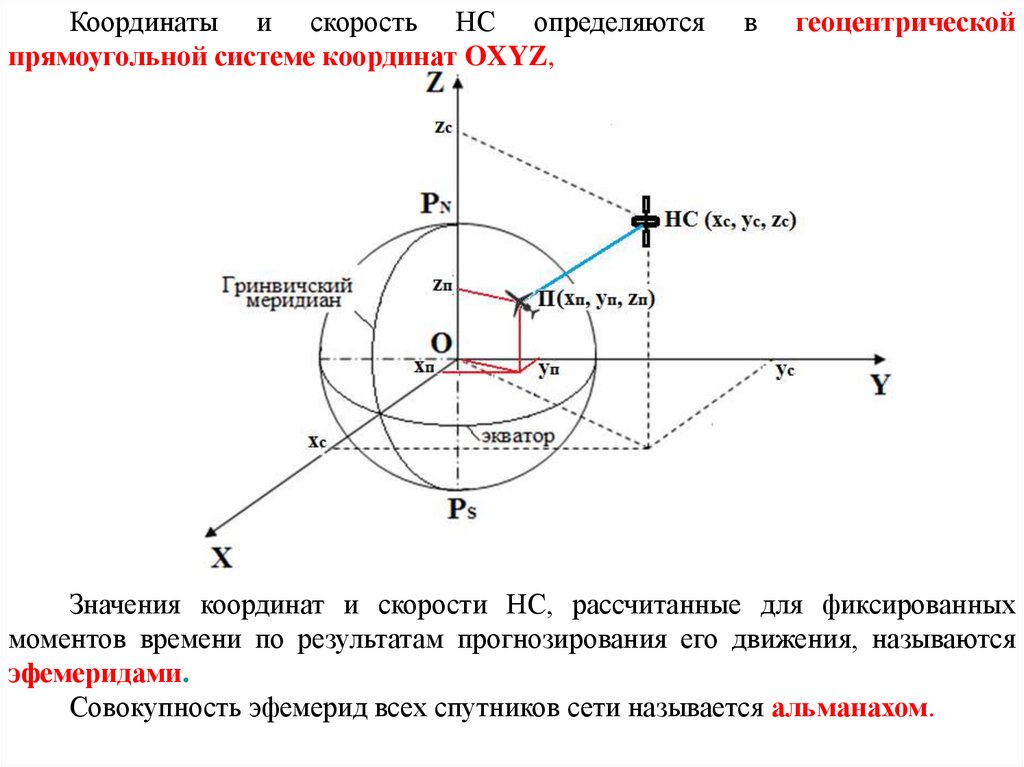
Координаты и скорость НС определяютсяпрямоугольной системе координат OXYZ,
в
геоцентрической
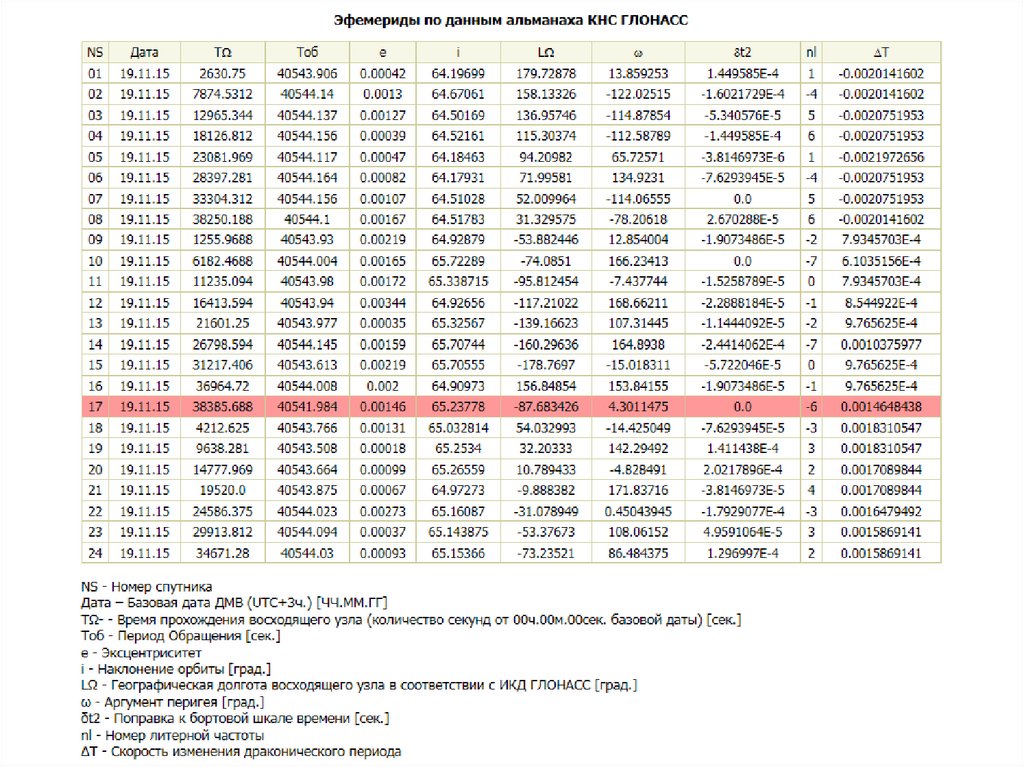
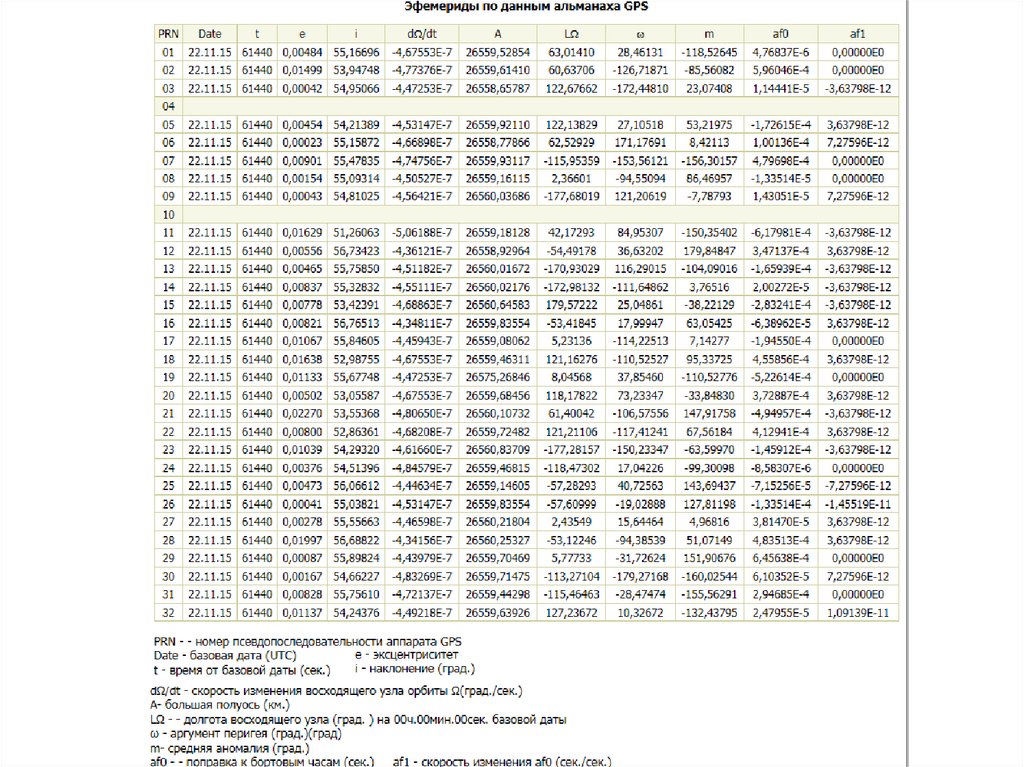
Значения координат и скорости НС, рассчитанные для фиксированных
моментов времени по результатам прогнозирования его движения, называются
эфемеридами.
Совокупность эфемерид всех спутников сети называется альманахом.
23.
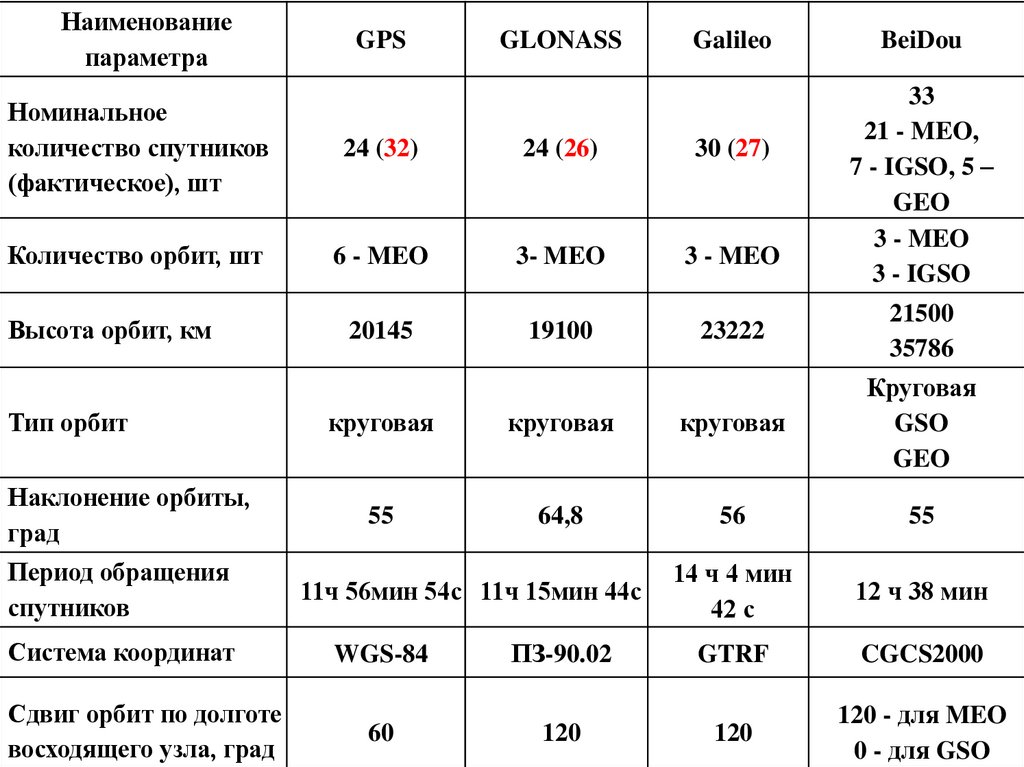
Наименованиепараметра
GPS
GLONASS
Galileo
BeiDou
33
21 - MEO,
7 - IGSO, 5 –
GEO
3 - MEO
3 - IGSO
Номинальное
количество спутников
(фактическое), шт
24 (32)
24 (26)
30 (27)
Количество орбит, шт
6 - MEO
3- MEO
3 - MEO
Высота орбит, км
20145
19100
23222
21500
35786
Тип орбит
Наклонение орбиты,
град
Период обращения
спутников
Система координат
Сдвиг орбит по долготе
восходящего узла, град
круговая
круговая
круговая
Круговая
GSO
GEO
55
64,8
56
55
14 ч 4 мин
42 с
12 ч 38 мин
GTRF
CGCS2000
120
120 - для MEO
0 - для GSO
11ч 56мин 54с 11ч 15мин 44с
WGS-84
60
ПЗ-90.02
120
24.
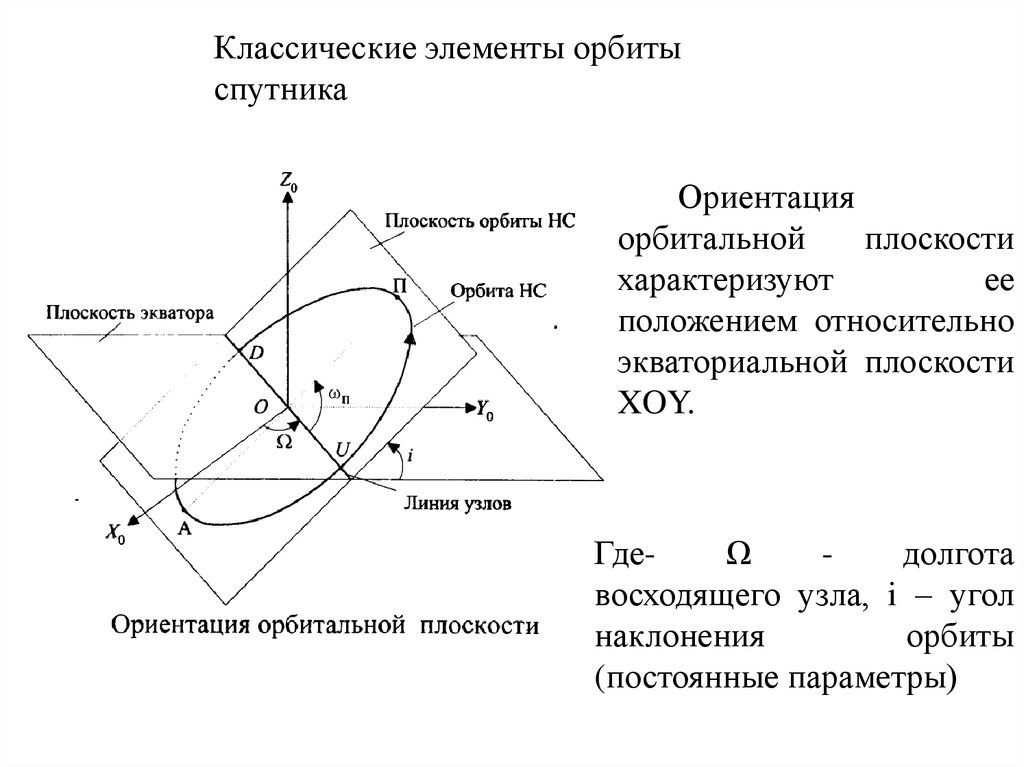
Классические элементы орбитыспутника
Ориентация
орбитальной
плоскости
характеризуют
ее
положением относительно
экваториальной плоскости
XOY.
ГдеΩ
долгота
восходящего узла, i – угол
наклонения
орбиты
(постоянные параметры)
25.
26.
27.
28.
29.
Расположение станций слежения GPS30.
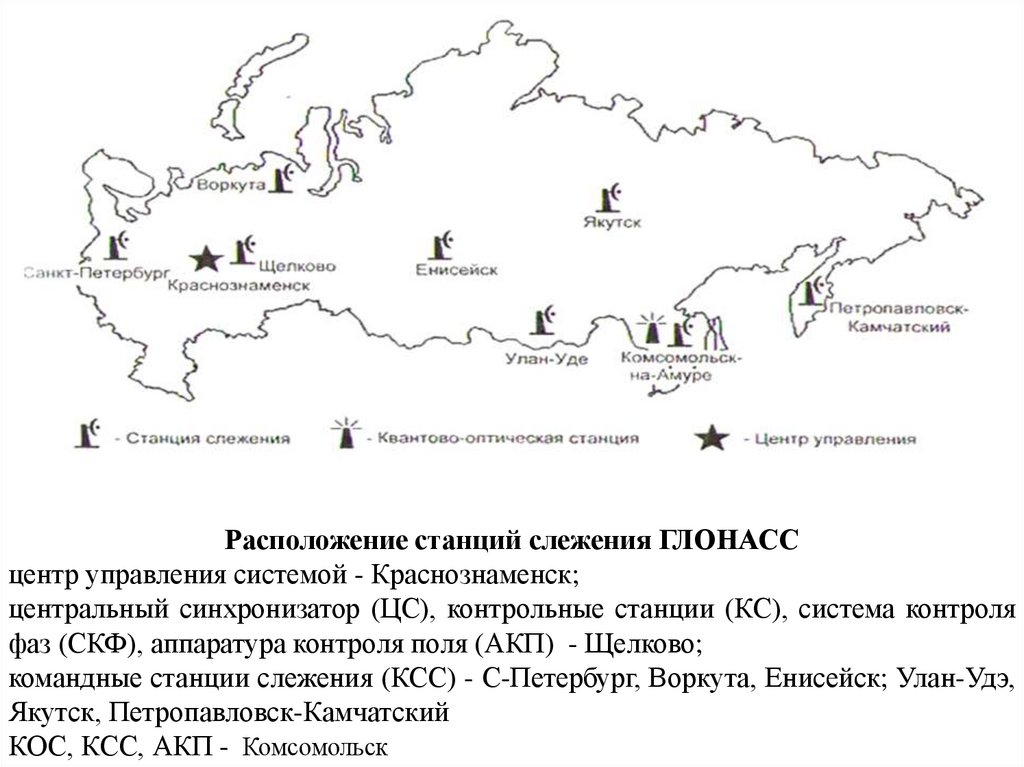
Расположение станций слежения ГЛОНАССцентр управления системой - Краснознаменск;
центральный синхронизатор (ЦС), контрольные станции (КС), система контроля
фаз (СКФ), аппаратура контроля поля (АКП) - Щелково;
командные станции слежения (КСС) - С-Петербург, Воркута, Енисейск; Улан-Удэ,
Якутск, Петропавловск-Камчатский
КОС, КСС, АКП - Комсомольск
31.
32.
33.
34.
3. Характеристика сигналовGPS и ГЛОНАСС
GPS и ГЛОНАСС являются системами двойного назначения –
для военных и гражданских потребителей.
Поэтому в них предусмотрены специальные меры, позволяющие
военным потребителям определять координаты с более высокой
точностью.
Реализация этих мер обеспечивается как структурой и
параметрами навигационных сигналов, излучаемых НС, так и
возможностью доступа к этим сигналам потребителям различного
назначения.
35.
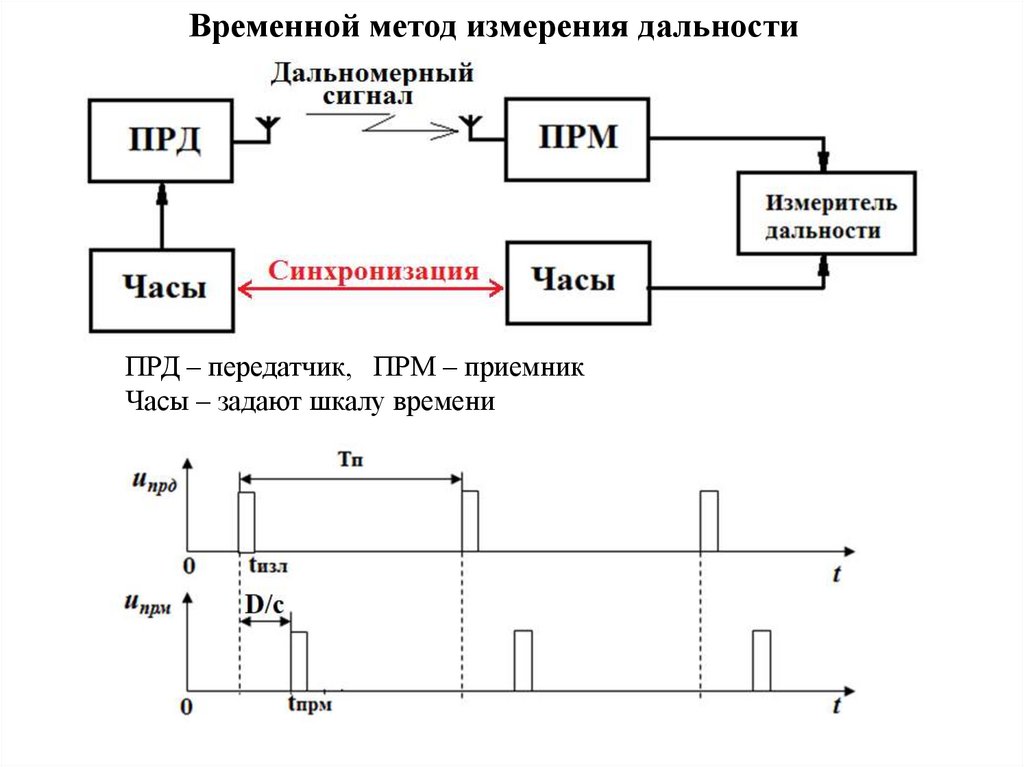
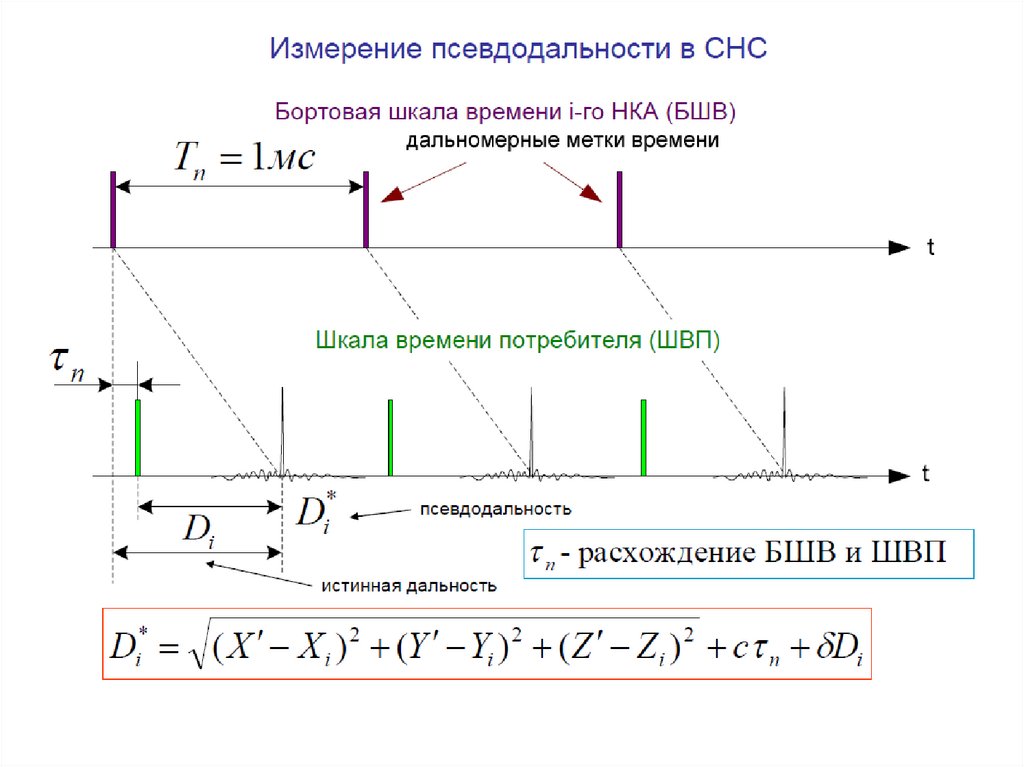
Временной метод измерения дальностиПРД – передатчик, ПРМ – приемник
Часы – задают шкалу времени
36.
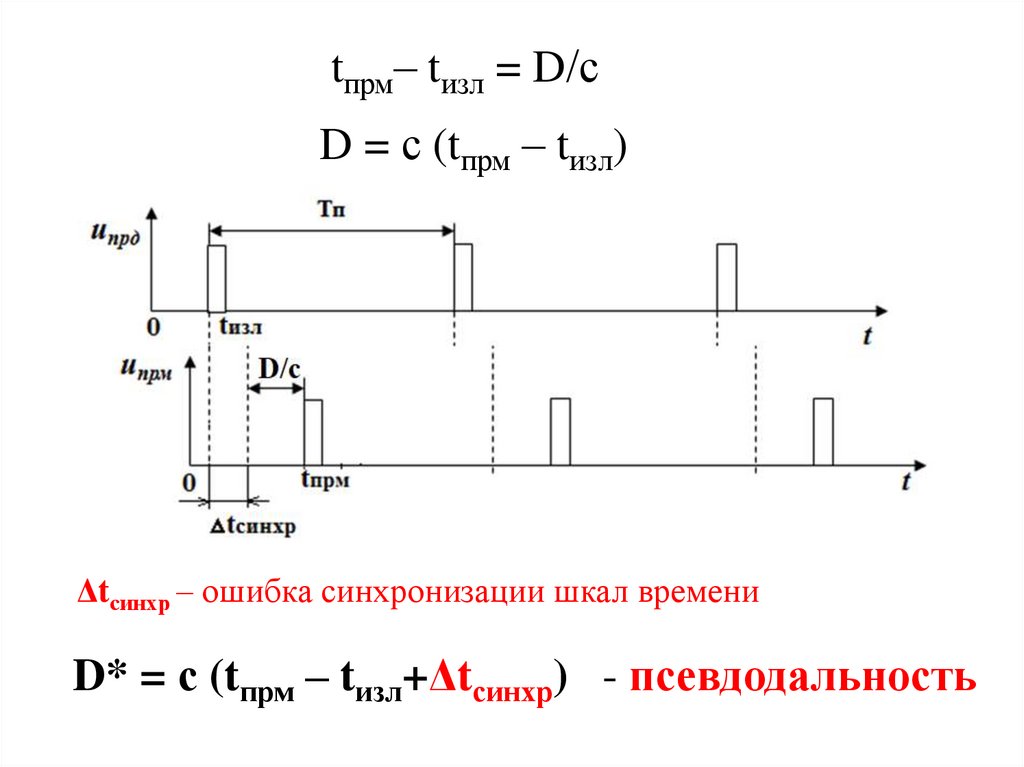
tпрм– tизл = D/сD = с (tпрм – tизл)
Δtсинхр – ошибка синхронизации шкал времени
D* = с (tпрм – tизл+Δtсинхр) - псевдодальность
37.
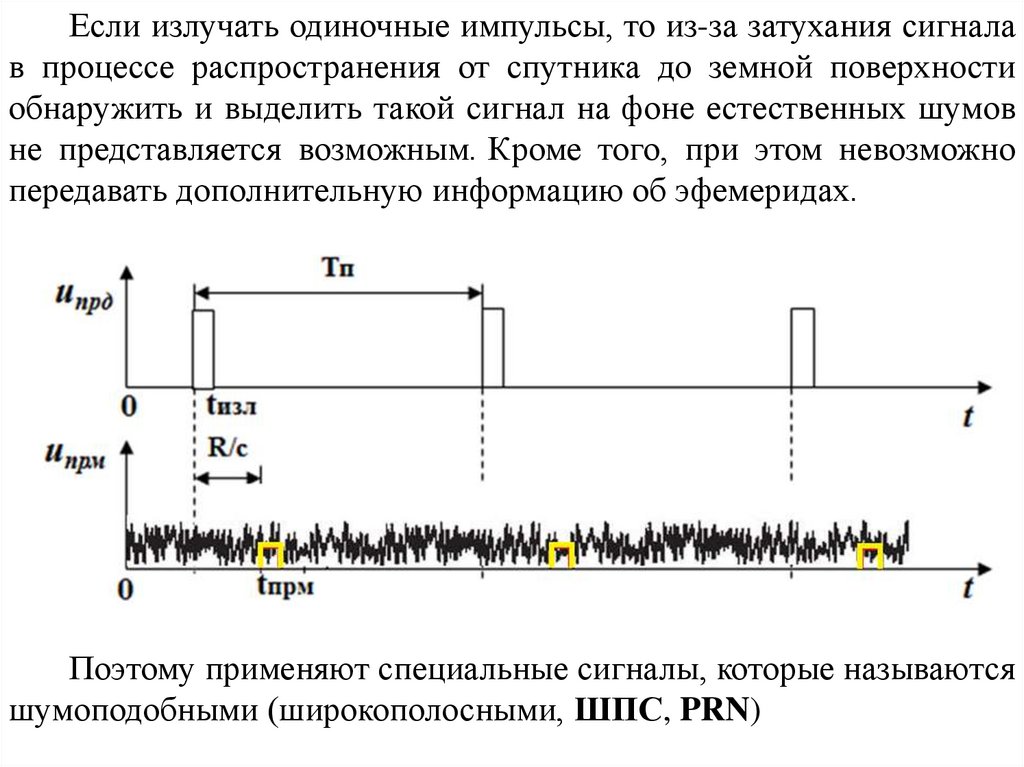
Если излучать одиночные импульсы, то из-за затухания сигналав процессе распространения от спутника до земной поверхности
обнаружить и выделить такой сигнал на фоне естественных шумов
не представляется возможным. Кроме того, при этом невозможно
передавать дополнительную информацию об эфемеридах.
Поэтому применяют специальные сигналы, которые называются
шумоподобными (широкополосными, ШПС, PRN)
38.
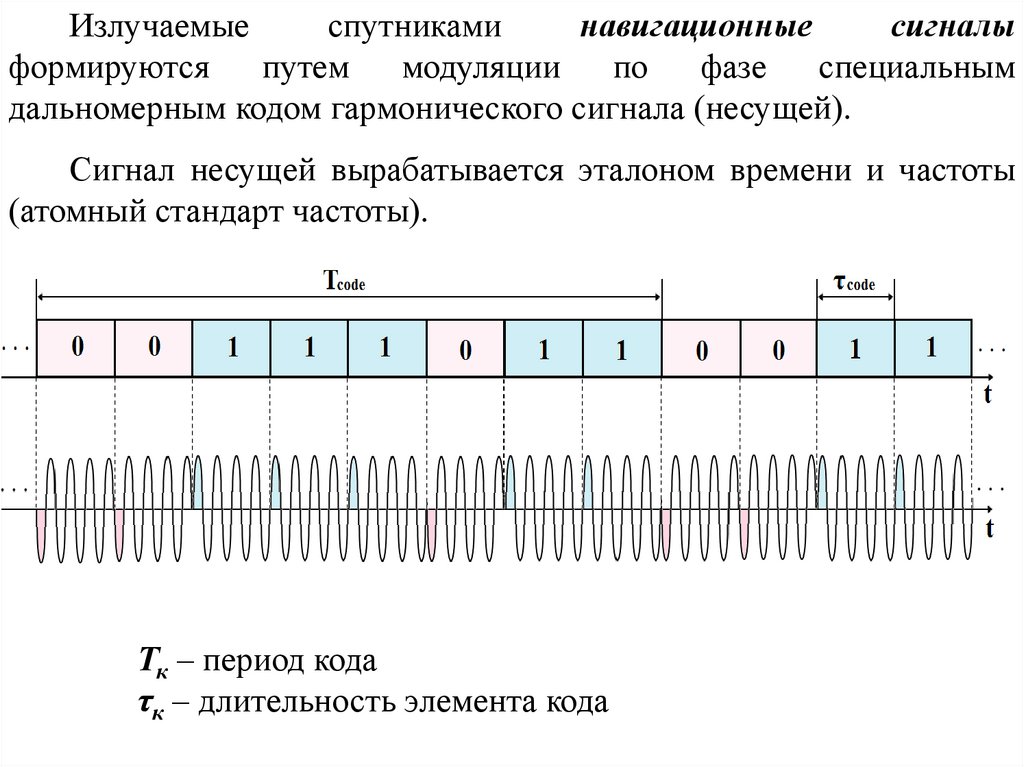
Излучаемыеспутниками
навигационные
сигналы
формируются
путем
модуляции
по
фазе
специальным
дальномерным кодом гармонического сигнала (несущей).
Сигнал несущей вырабатывается эталоном времени и частоты
(атомный стандарт частоты).
Тк – период кода
τк – длительность элемента кода
39.
Дальномерный код, который называется навигационным кодом,формируется непрерывно с периодом повторения элементов кода Тк.
Соответственно и навигационный сигнал спутником излучается
непрерывно.
Этот сигнал можно обнаружить и принять, даже если его
уровень ниже уровня естественных шумов в точке приема.
Это возможно за счет использования специального алгоритма
приема и обработки принимаемого сигнала - корреляционного
приема.
40.
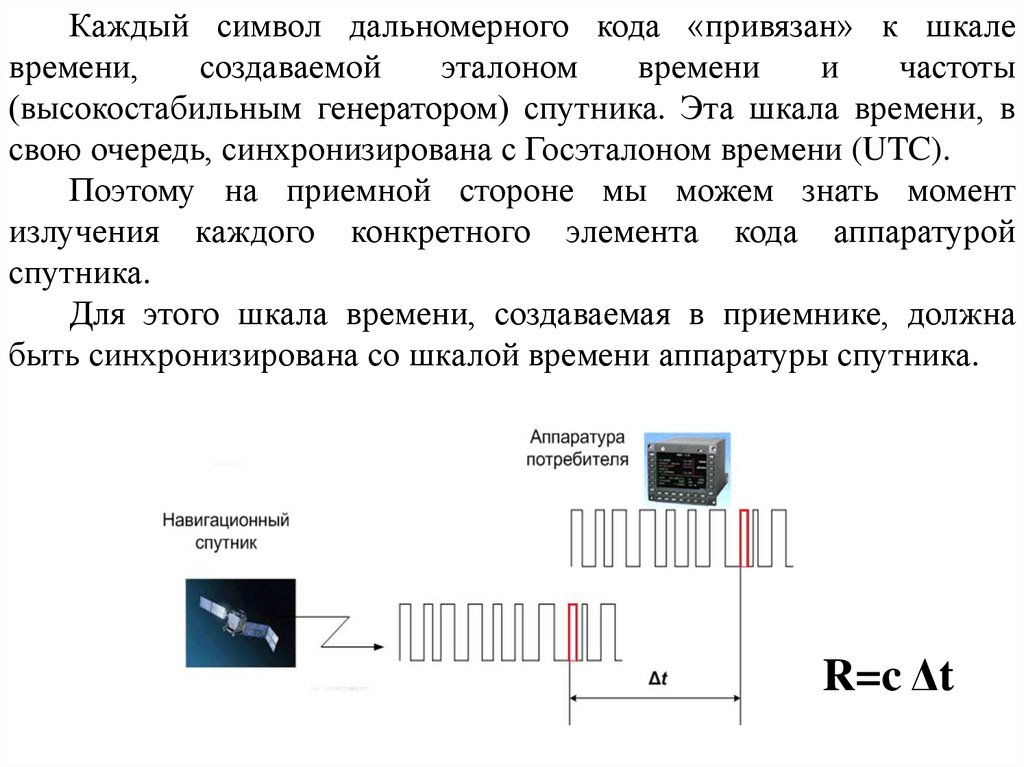
Каждый символ дальномерного кода «привязан» к шкалевремени,
создаваемой
эталоном
времени
и
частоты
(высокостабильным генератором) спутника. Эта шкала времени, в
свою очередь, синхронизирована с Госэталоном времени (UTC).
Поэтому на приемной стороне мы можем знать момент
излучения каждого конкретного элемента кода аппаратурой
спутника.
Для этого шкала времени, создаваемая в приемнике, должна
быть синхронизирована со шкалой времени аппаратуры спутника.
R=c Δt
41.
Для определения координат потребителя по измереннымзадержкам принимаемых сигналов необходимо знать эфемериды
НС на момент решения навигационной задачи.
Поэтому навигационный сигнал, излучаемый каждым НС,
содержит не только навигационную, но и служебную
информацию.
Служебная информация содержит данные о координатах
спутника на орбите, о параметрах орбиты, точное время спутника
(эфемериды), а также данные об альманахе системы.
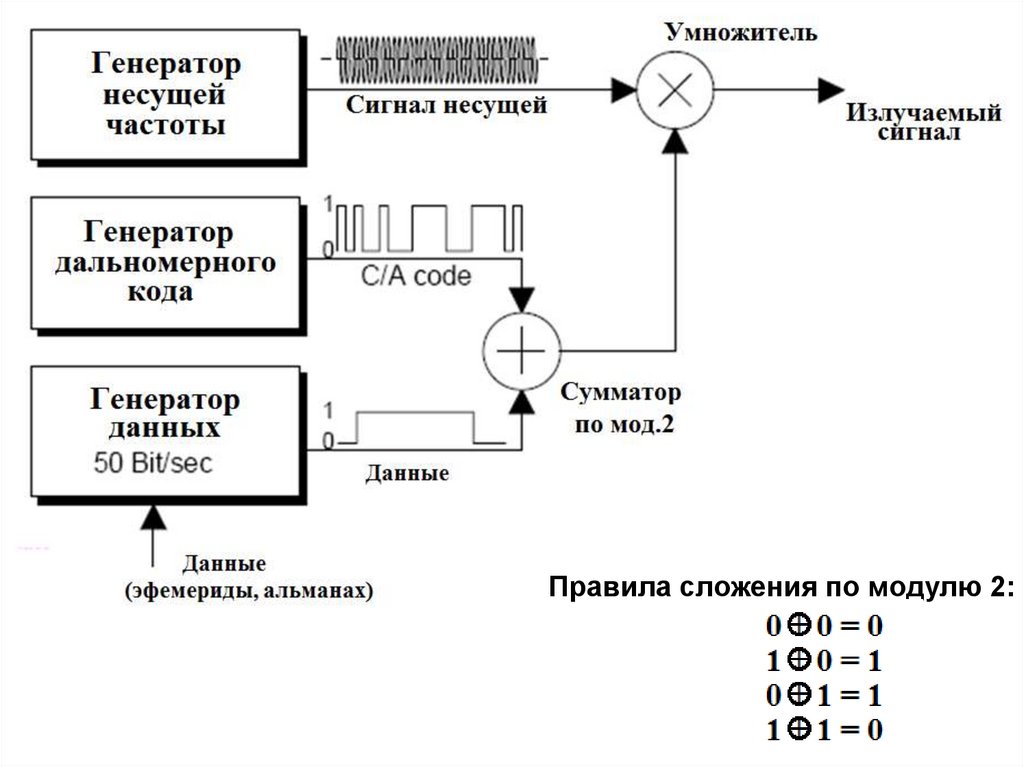
42.
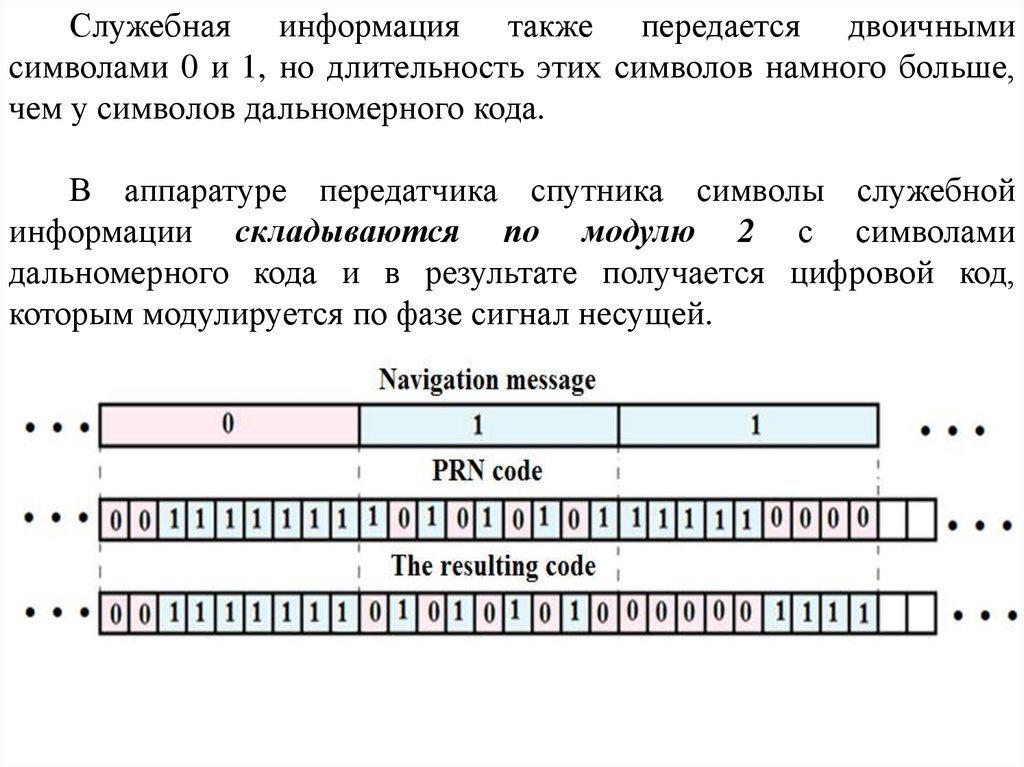
Служебная информация также передается двоичнымисимволами 0 и 1, но длительность этих символов намного больше,
чем у символов дальномерного кода.
В аппаратуре передатчика спутника символы служебной
информации складываются по модулю 2 с символами
дальномерного кода и в результате получается цифровой код,
которым модулируется по фазе сигнал несущей.
43.
Правила сложения по модулю 2:44.
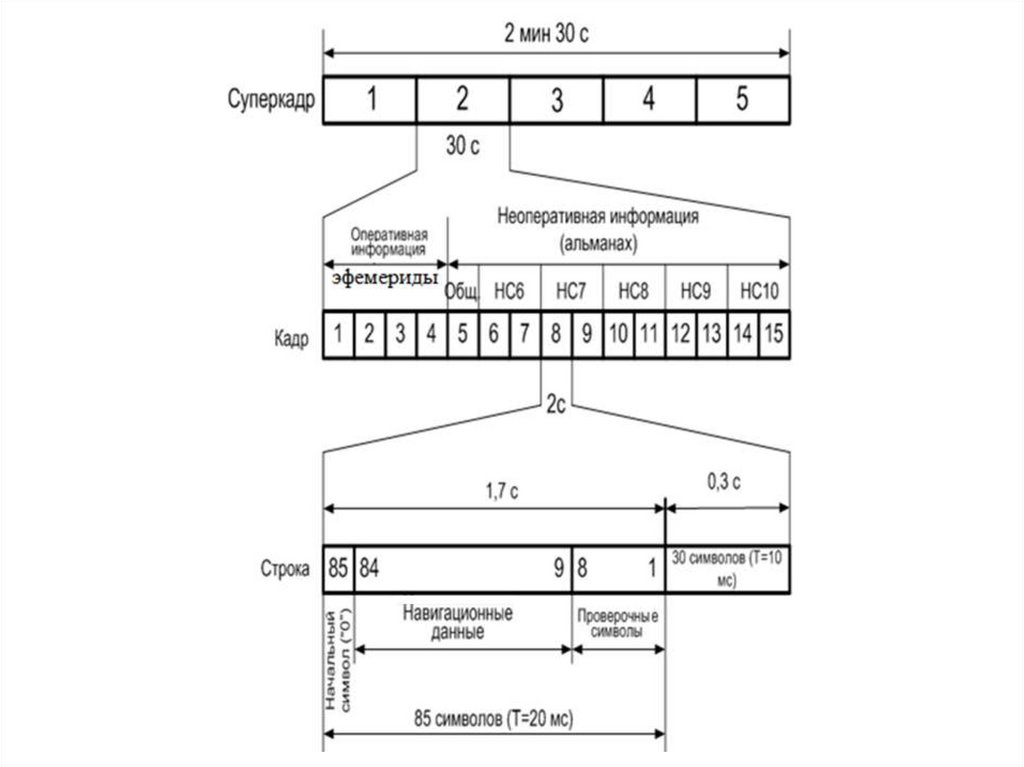
Служебная информация передается суперкадрами со скоростью50 бит/с.
Суперкадр содержит информацию об эфемеридах данного
спутника и полный альманах системы.
Длительность суперкадра – 2,5 мин. в ГЛОНАСС и 12,5 мин. в
GPS.
Суперкадр разбит на 5 кадров длительностью по 30 сек.
Каждый кадр содержит 15 строк информации длительностью
по 2 сек.
В этих строках содержится информация об эфемеридах данного
спутника и часть альманаха, а также проверочные символы.
45.
46.
47.
48.
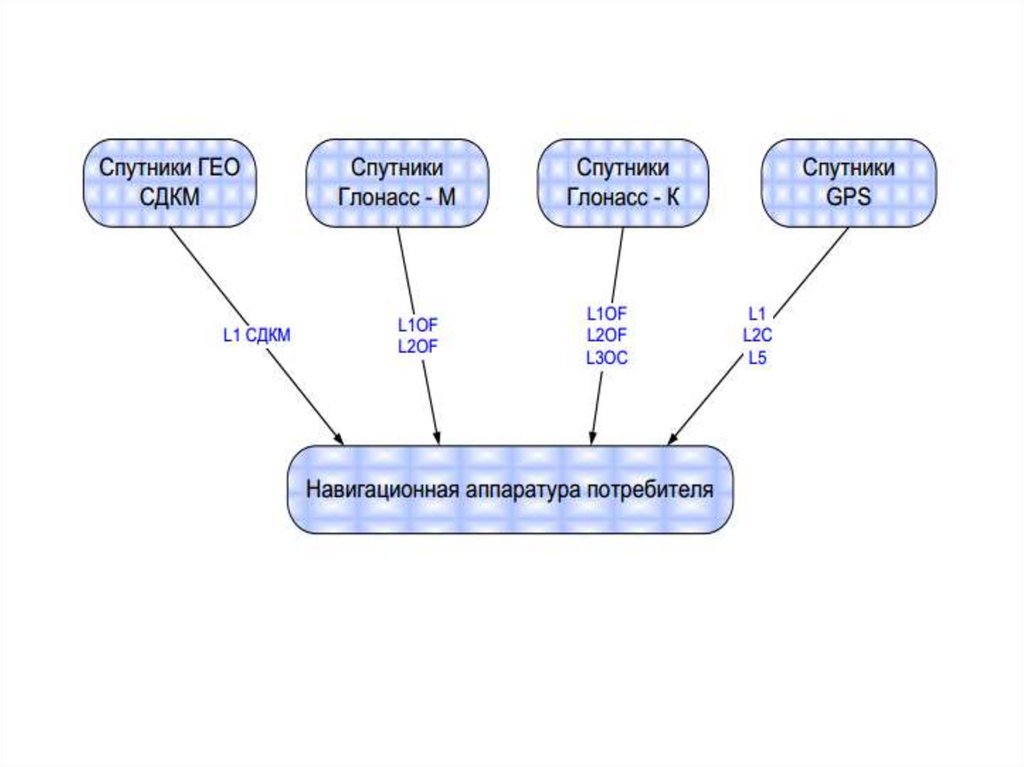
Каждый спутник и в ГЛОНАСС, и в GPS, непрерывноизлучает 2 навигационных сигнала на частотах L1 и L2.
На входе приемника потребителя
одновременно
присутствуют сигналы от всех спутников, находящихся в зоне
видимости.
Как различить и раздельно принять сигналы от разных
спутников?
Для различения сигналы должны отличаться какими-нибудь
параметрами.
49.
Для различениясигналов от разных спутников в GPS
используется кодовое разделение.
При этом все спутники излучают сигналы на одной и той же
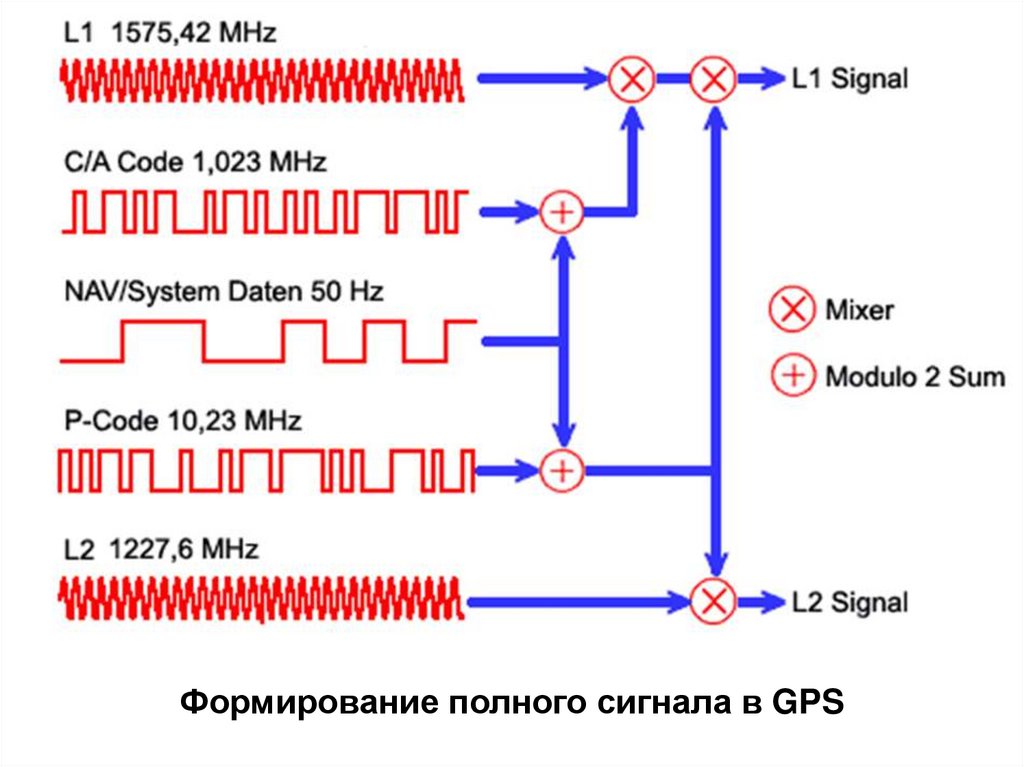
частоте (L1 =1575,4 МГц и L2=1227,6 МГц), но дальномерный код
для каждого спутника индивидуален.
В ГЛОНАСС используется частотное разделение.
При этом все спутники излучают сигнал с одним и тем же
дальномерным кодом, но каждый на своей несущей частоте в
диапазонах L1~1598…1605 МГц и L2~1242…1248 МГц.
50.
Таким образом, спутники излучают сигналы на частоте1598…1605 МГц (1575 МГц) с доступным для всех потребителей
навигационным кодом:
- сигнал кода СТ (стандартной точности, в системе ГЛОНАСС)
- сигнал C/А-кода (в системе GPS),
и сигналы на двух частотах 1598…1605 МГц (1575 МГц) и
1242…1248 МГц (1227 МГц) с навигационным кодом:
- сигнал кода ВТ (высокой точности, в системе ГЛОНАСС)
- сигнал Р-кода (в системе GPS).
При этом длительность элемента ВТ (Р-кода) в 10 раз меньше
длительности элемента ПТ (С/А-кода).
51.
Формирование полного сигнала в GPS52.
Точность определения координат зависит от точностиизмерения дальности до спутника.
Точность измерения дальности существенно зависит от:
- дополнительной
неизвестной
распространении через ионосферу;
задержки
- вида используемого сигнала;
- длительности элемента дальномерного кода.
сигнала
при
53.
Задержка сигнала в ионосфере зависит от частоты сигнала.Поэтому, если принимать сигнал на двух разных частотах,
можно вычислить дополнительную ионосферную задержку и
скомпенсировать ее в приемнике.
Приемники военного назначения могут принимать сигнал
на двух частотах, а другие приемники – нет.
Для того, чтобы сигнал на второй частоте был не доступен
обычным приемникам, в нем используется специальный
дальномерный код, который невозможно раскрыть без знания
ключа.
54.
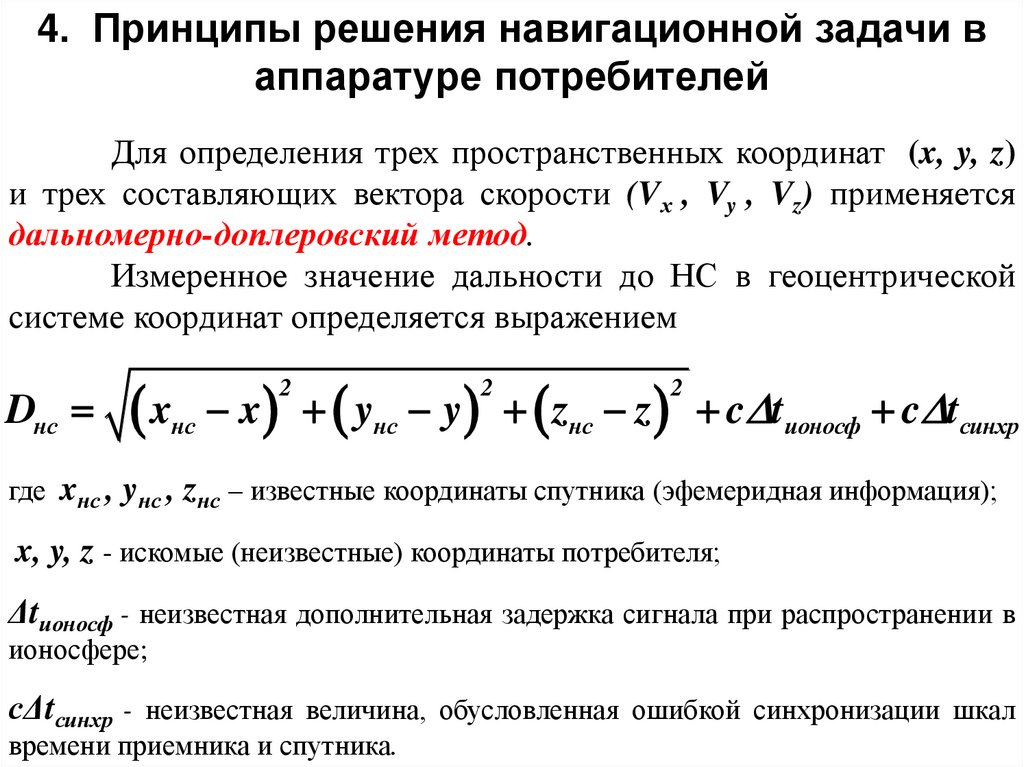
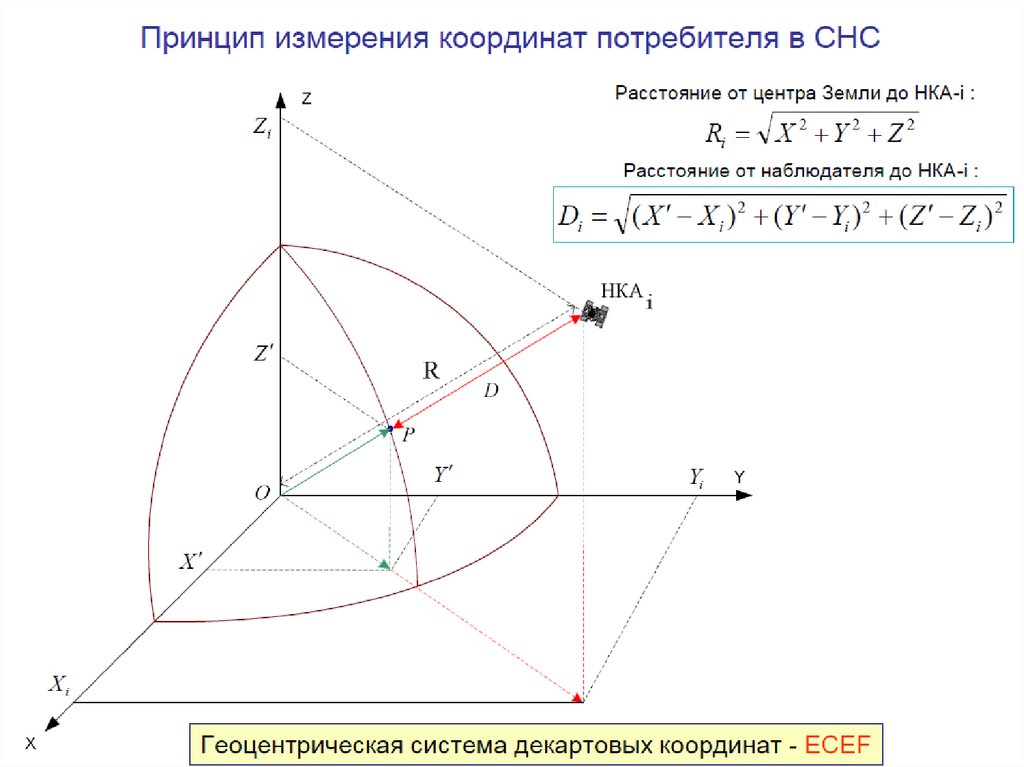
4. Принципы решения навигационной задачи ваппаратуре потребителей
Для определения трех пространственных координат (x, y, z)
и трех составляющих вектора скорости (Vх , Vy , Vz) применяется
дальномерно-доплеровский метод.
Измеренное значение дальности до НС в геоцентрической
системе координат определяется выражением
Dнс
xнс x yнс y zнс z c tионосф c tсинхр
2
2
2
где xнс , yнс , zнс – известные координаты спутника (эфемеридная информация);
x, y, z - искомые (неизвестные) координаты потребителя;
Δtионосф - неизвестная дополнительная задержка сигнала при распространении в
ионосфере;
сΔtсинхр - неизвестная величина, обусловленная ошибкой синхронизации шкал
времени приемника и спутника.
55.
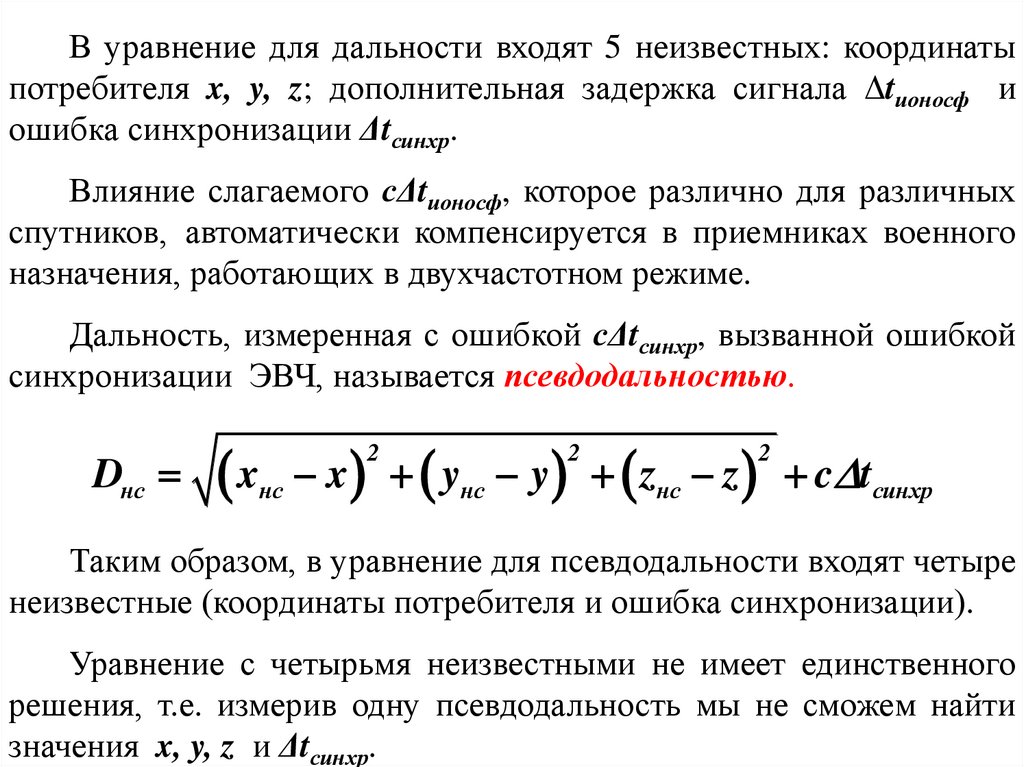
В уравнение для дальности входят 5 неизвестных: координатыпотребителя x, y, z; дополнительная задержка сигнала Δtионосф и
ошибка синхронизации Δtсинхр.
Влияние слагаемого сΔtионосф, которое различно для различных
спутников, автоматически компенсируется в приемниках военного
назначения, работающих в двухчастотном режиме.
Дальность, измеренная с ошибкой сΔtсинхр, вызванной ошибкой
синхронизации ЭВЧ, называется псевдодальностью.
Dнс
xнс x yнс y zнс z c tсинхр
2
2
2
Таким образом, в уравнение для псевдодальности входят четыре
неизвестные (координаты потребителя и ошибка синхронизации).
Уравнение с четырьмя неизвестными не имеет единственного
решения, т.е. измерив одну псевдодальность мы не сможем найти
значения x, y, z и Δtсинхр.
56.
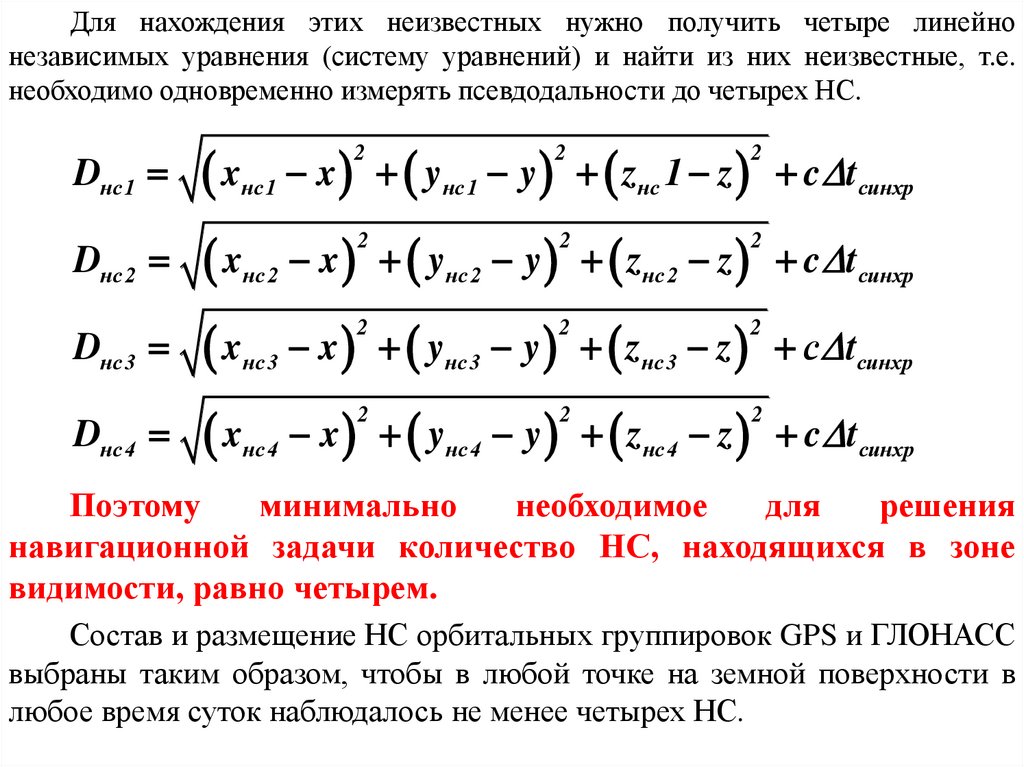
Для нахождения этих неизвестных нужно получить четыре линейнонезависимых уравнения (систему уравнений) и найти из них неизвестные, т.е.
необходимо одновременно измерять псевдодальности до четырех НС.
Dнс1
xнс1 x yнс1 y zнс 1 z c tсинхр
Dнс 2
xнс 2 x yнс 2 y zнс 2 z c tсинхр
Dнс 3
xнс 3 x yнс 3 y zнс 3 z с tсинхр
Dнс 4
xнс 4 x yнс 4 y zнс 4 z c tсинхр
2
2
2
2
2
2
2
2
2
2
2
2
Поэтому
минимально
необходимое
для
решения
навигационной задачи количество НС, находящихся в зоне
видимости, равно четырем.
Состав и размещение НС орбитальных группировок GPS и ГЛОНАСС
выбраны таким образом, чтобы в любой точке на земной поверхности в
любое время суток наблюдалось не менее четырех НС.
57.
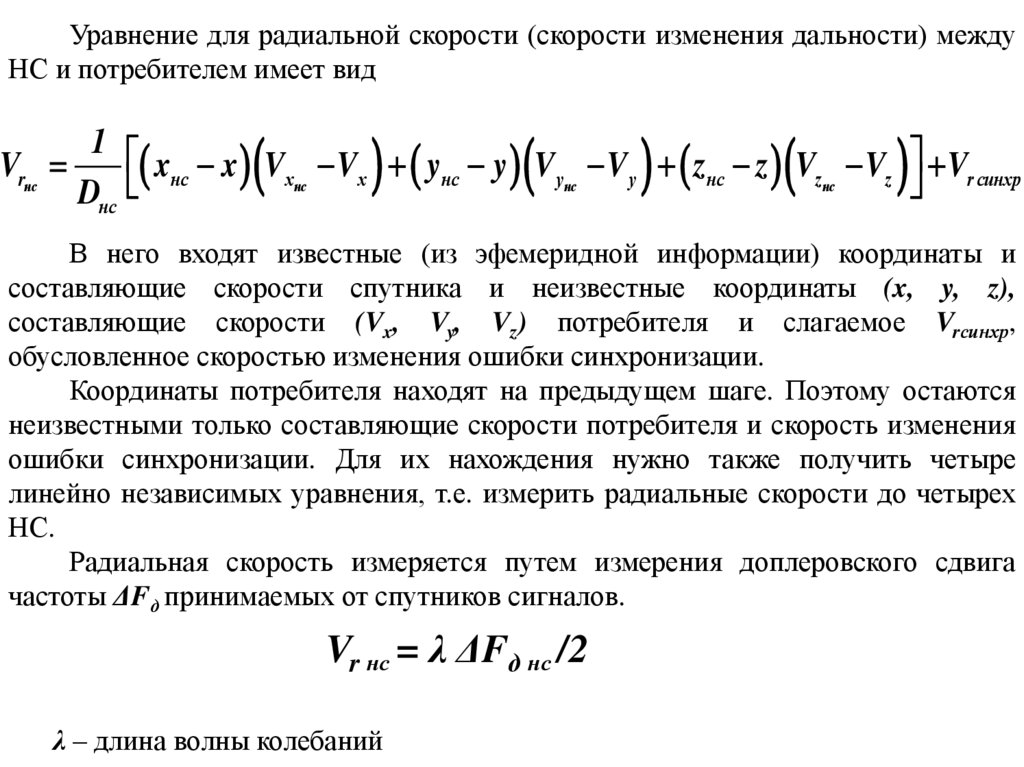
Уравнение для радиальной скорости (скорости изменения дальности) междуНС и потребителем имеет вид
1
Vrнс
xнс x Vxнс Vx yнс y Vyнс Vy zнс z Vzнс Vz Vr синхр
Dнс
В него входят известные (из эфемеридной информации) координаты и
составляющие скорости спутника и неизвестные координаты (x, y, z),
составляющие скорости (Vx, Vy, Vz) потребителя и слагаемое Vrсинхр,
обусловленное скоростью изменения ошибки синхронизации.
Координаты потребителя находят на предыдущем шаге. Поэтому остаются
неизвестными только составляющие скорости потребителя и скорость изменения
ошибки синхронизации. Для их нахождения нужно также получить четыре
линейно независимых уравнения, т.е. измерить радиальные скорости до четырех
НС.
Радиальная скорость измеряется путем измерения доплеровского сдвига
частоты ΔFд принимаемых от спутников сигналов.
Vr нс = λ ΔFд нс /2
λ – длина волны колебаний
58.
59.
60.
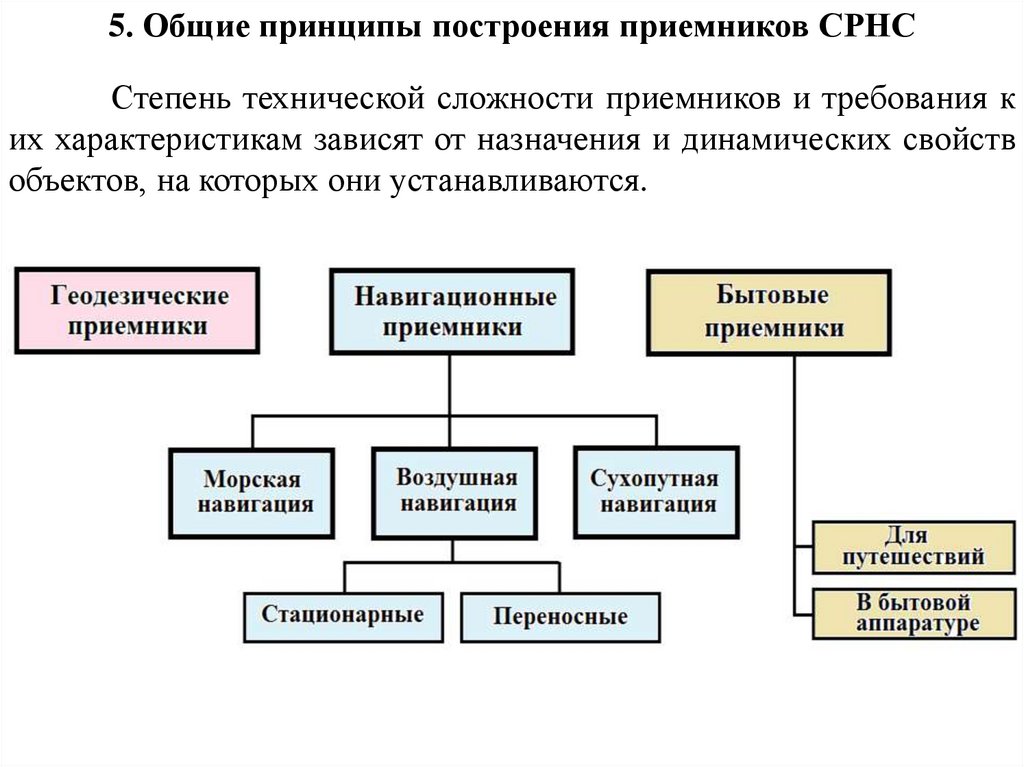
5. Общие принципы построения приемников СРНССтепень технической сложности приемников и требования к
их характеристикам зависят от назначения и динамических свойств
объектов, на которых они устанавливаются.
61.
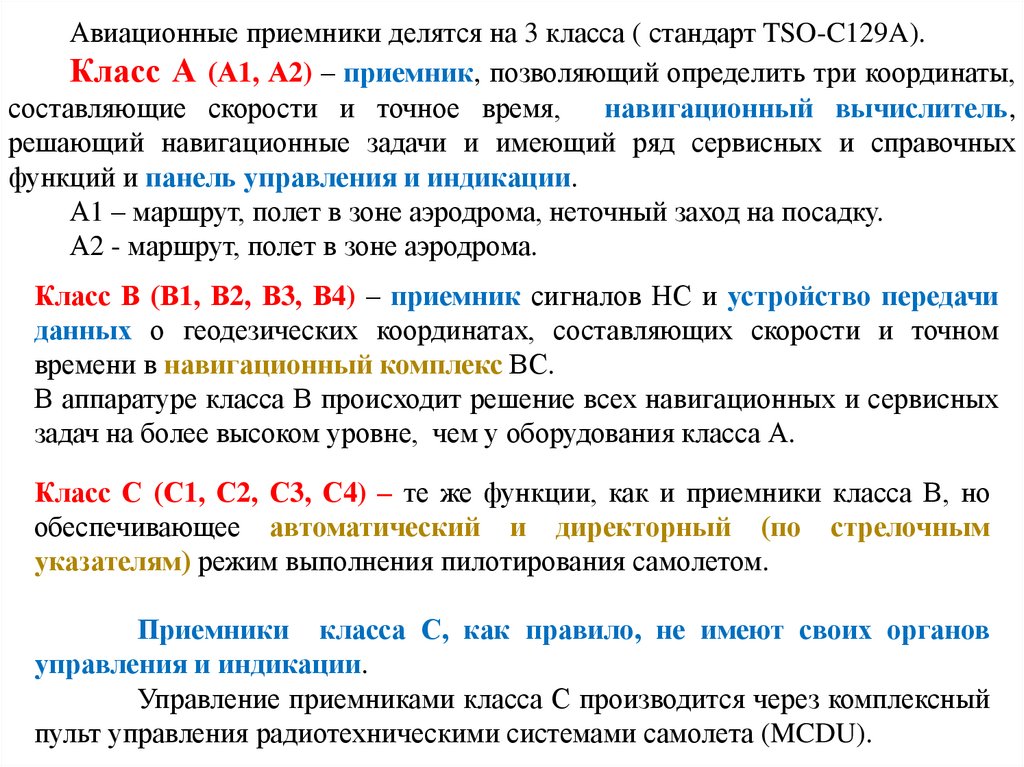
Авиационные приемники делятся на 3 класса ( стандарт TSO-C129A).Класс А (А1, А2) – приемник, позволяющий определить три координаты,
составляющие скорости и точное время,
навигационный вычислитель,
решающий навигационные задачи и имеющий ряд сервисных и справочных
функций и панель управления и индикации.
А1 – маршрут, полет в зоне аэродрома, неточный заход на посадку.
А2 - маршрут, полет в зоне аэродрома.
Класс В (В1, В2, В3, В4) – приемник сигналов НС и устройство передачи
данных о геодезических координатах, составляющих скорости и точном
времени в навигационный комплекс ВС.
В аппаратуре класса В происходит решение всех навигационных и сервисных
задач на более высоком уровне, чем у оборудования класса А.
Класс С (С1, С2, С3, С4) – те же функции, как и приемники класса В, но
обеспечивающее автоматический и директорный (по стрелочным
указателям) режим выполнения пилотирования самолетом.
Приемники класса С, как правило, не имеют своих органов
управления и индикации.
Управление приемниками класса С производится через комплексный
пульт управления радиотехническими системами самолета (MCDU).
62.
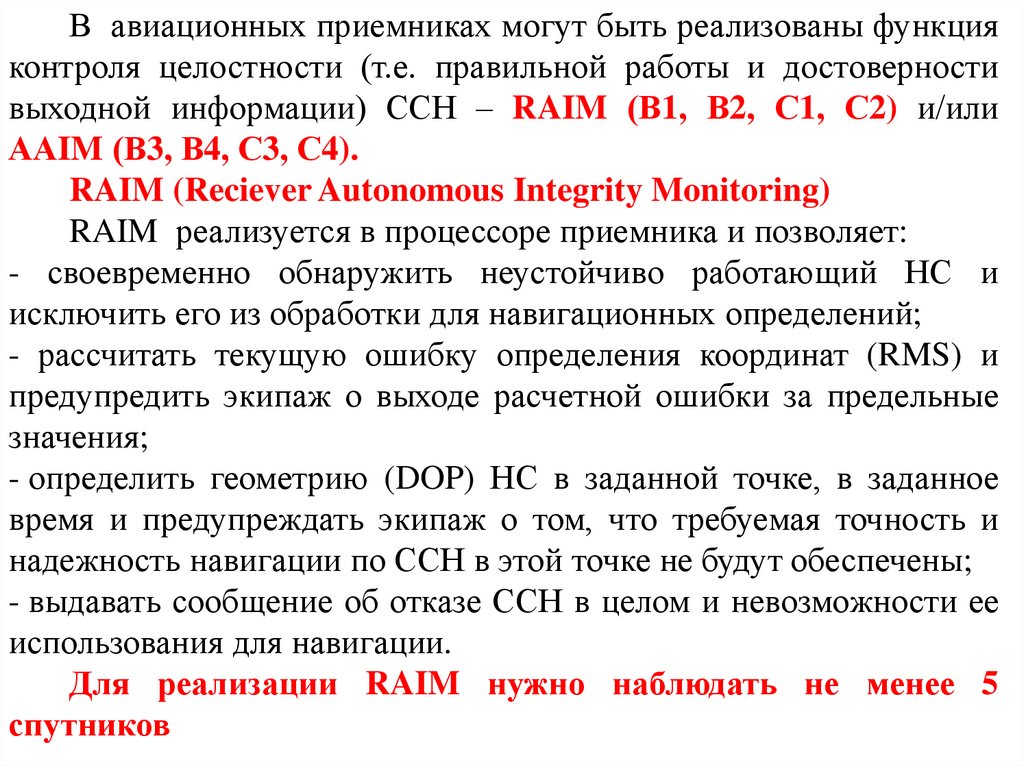
В авиационных приемниках могут быть реализованы функцияконтроля целостности (т.е. правильной работы и достоверности
выходной информации) ССН – RAIM (В1, В2, С1, С2) и/или
ААIM (В3, В4, С3, С4).
RAIM (Reciever Autonomous Integrity Monitoring)
RAIM реализуется в процессоре приемника и позволяет:
- своевременно обнаружить неустойчиво работающий НС и
исключить его из обработки для навигационных определений;
- рассчитать текущую ошибку определения координат (RMS) и
предупредить экипаж о выходе расчетной ошибки за предельные
значения;
- определить геометрию (DOP) НС в заданной точке, в заданное
время и предупреждать экипаж о том, что требуемая точность и
надежность навигации по ССН в этой точке не будут обеспечены;
- выдавать сообщение об отказе ССН в целом и невозможности ее
использования для навигации.
Для реализации RAIM нужно наблюдать не менее 5
спутников
63.
В целях RAIM производятся несколько независимыхопределений, результаты которых сравниваются между собой.
По результатам этих расчетов определяется четыре устойчиво
работающих спутника и по этим «отфильтрованным» спутникам
производится определение навигационных параметров.
Если функция RAIM отфильтровала один из пяти видимых
спутников, то RAIM перестает работать.
Если приемником ССН принимается информация шести и
более спутников, то процедура RAIM после исключения из
обработки одного спутника и подключения другого продолжает
работать
и
контролировать
надежность
навигационных
определений.
64.
AAIM (Airraft Autonomous Integrity Monitoring)обеспечивает контроль целостности (достоверности информации)
путем ее сравнения с навигационной информацией, получаемой от
других навигационных систем (ИНС, LORAN-C, DME/DME,
VOR/DME).
AAIM имеет только одно преимущество по сравнению с
RAIM - нет необходимости обрабатывать сигналы от одного
дополнительного
спутника,
что
позволяет
продолжать
навигационные определения с гарантией их достоверности при
видимости только 4-х спутников.
65.
66.
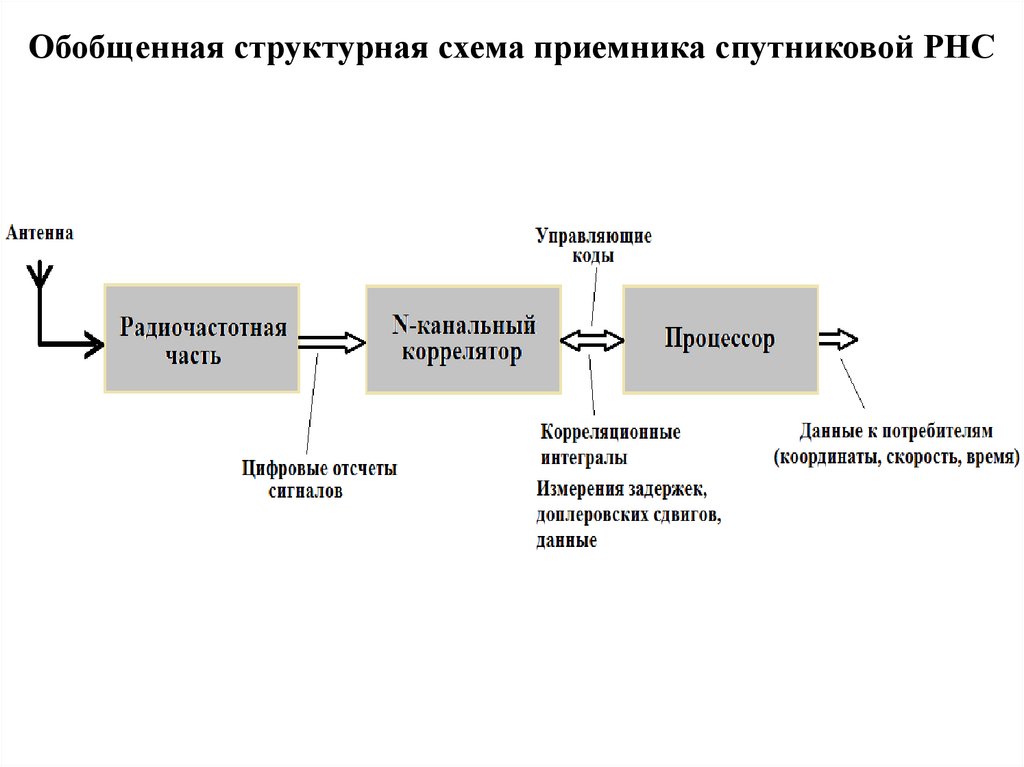
Обобщенная структурная схема приемника спутниковой РНС67.
Основные режимы работы АП:поиск сигналов;
слежение за задержкой кода, частотой и фазой сигнала;
решение навигационной задачи - определение координат и
скорости.
В режиме поиска сигналов производится грубая, но
достаточная для захвата системой слежения, оценка
временной задержки и частоты сигнала.
В режиме слежения после захвата сигнала системами
автоматической подстройки частоты, фазы и времени
осуществляется
более
точное
измерение
задержки
(псевдодальности) и доплеровского сдвига частоты.
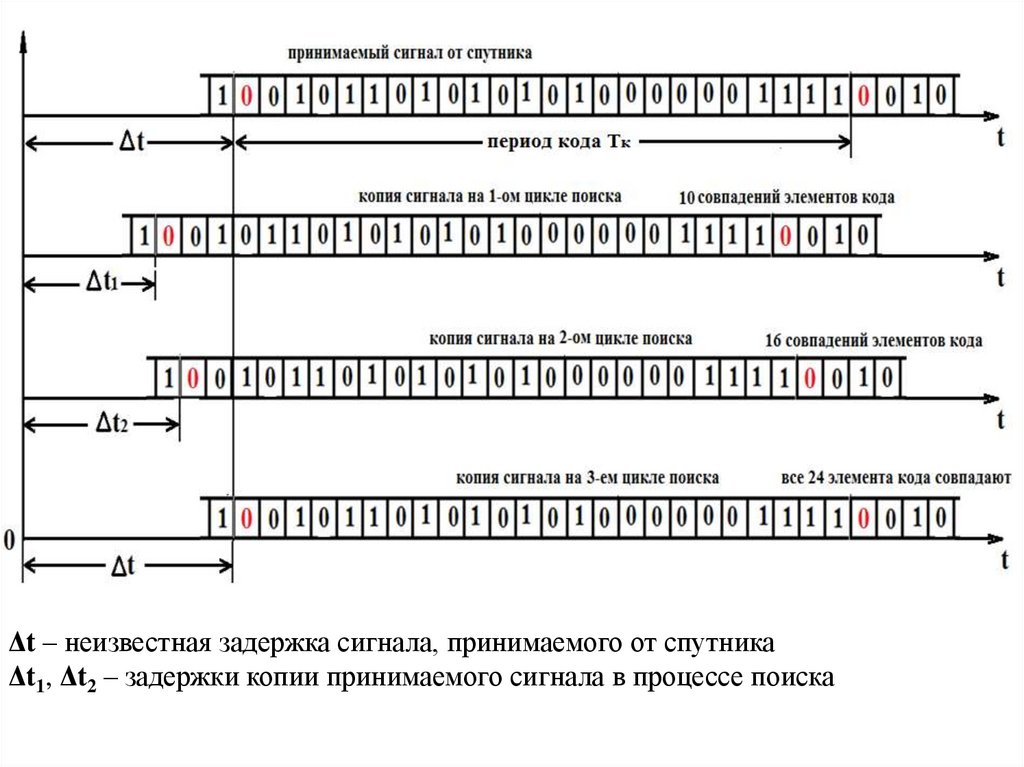
68.
Δt – неизвестная задержка сигнала, принимаемого от спутникаΔt1, Δt2 – задержки копии принимаемого сигнала в процессе поиска
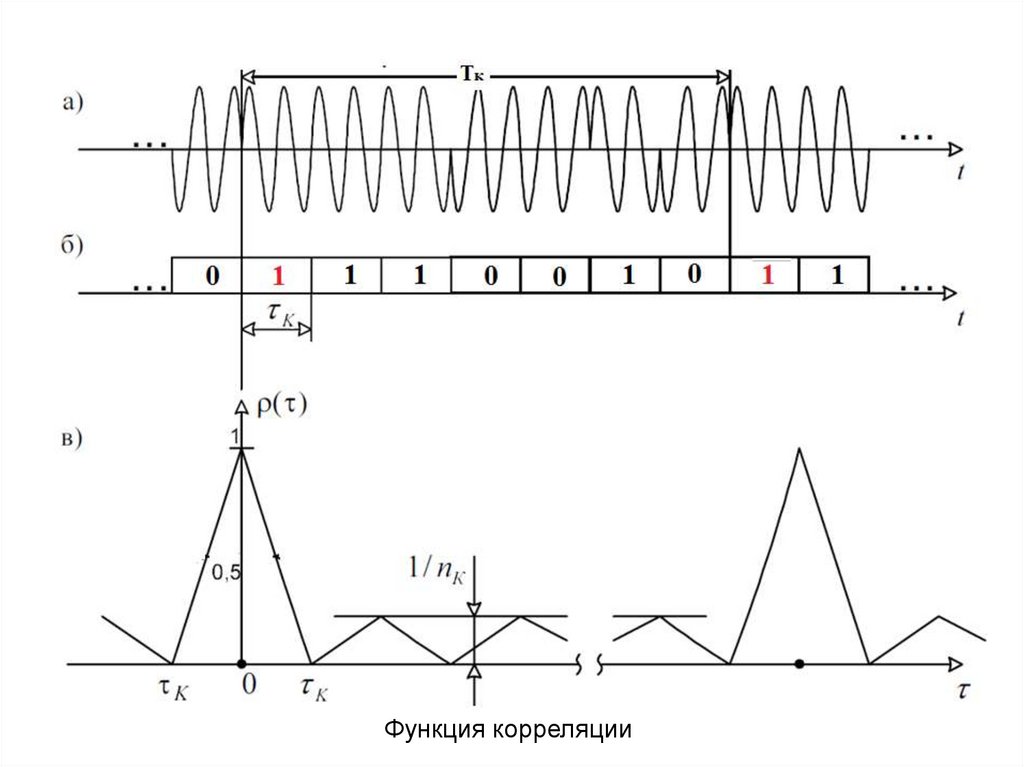
69.
Функция корреляции70.
Авиационный приемник А-73771.
СН-431272.
73.
74.
75.
76.
77.
78.
Инерциально-спутниковая система навигации79.
Какие проблемы естьу спутниковой навигации?
80.
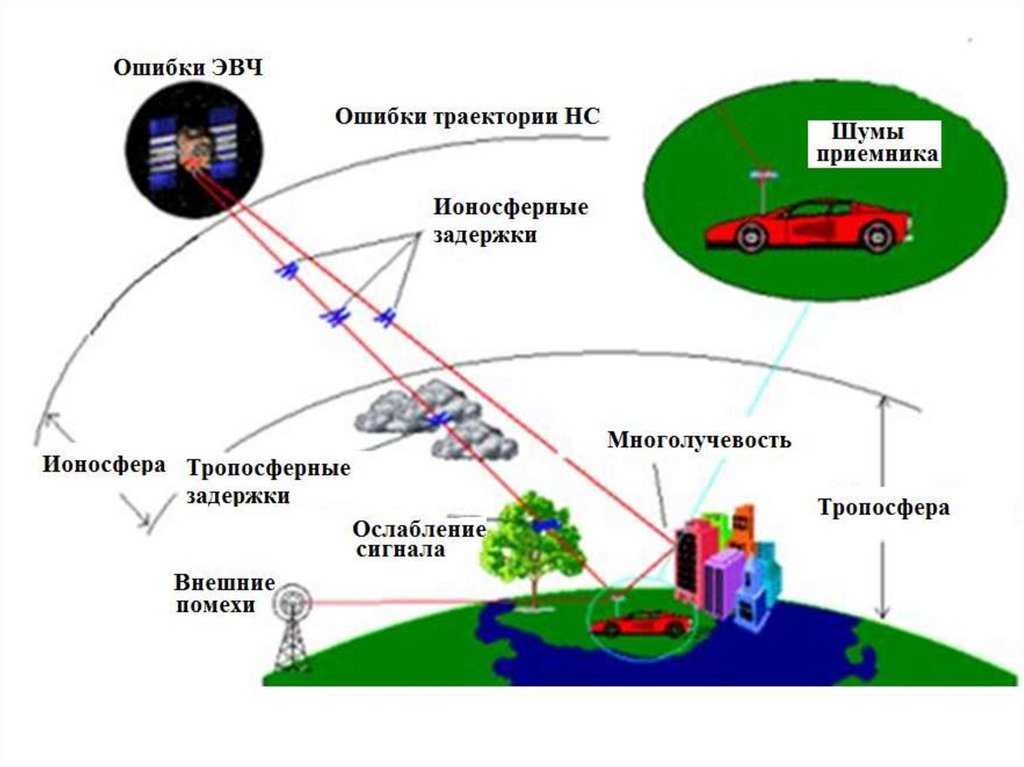
6. Факторы, влияющие на точность спутниковойРНС
Точность определения координат и составляющих скорости по
данным ССН зависит от многих факторов, основными из которых
являются:
несовершенство аппаратуры, размещенной на НС;
несоответствие эфемерид фактическим параметрам движения НС;
условия распространения радиосигналов в ионосфере и
тропосфере;
многолучевое распространение радиосигнала;
несовершенство приемоиндикатора;
взаимное расположение потребителя и НС выбранного рабочего
созвездия.
Важно! ГЛОНАСС и GPS работают в разных системах координат, и это
может привести к неточности решения навигационной задачи по GPS на
территории России (при решении геодезических задач)
81.
82.
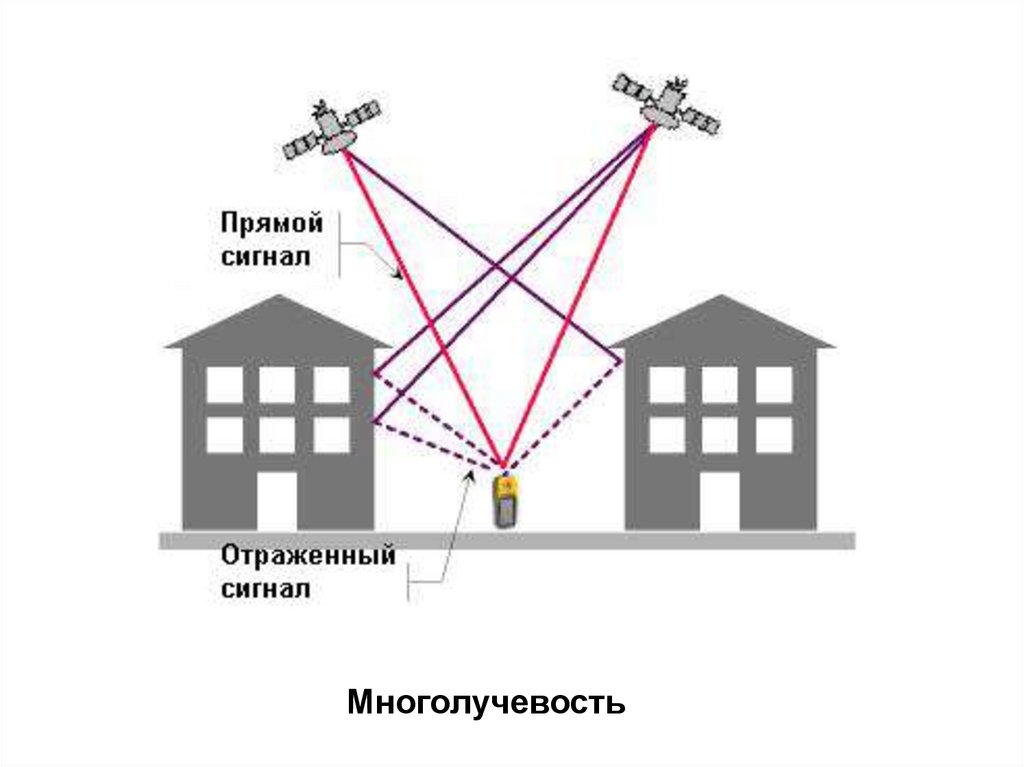
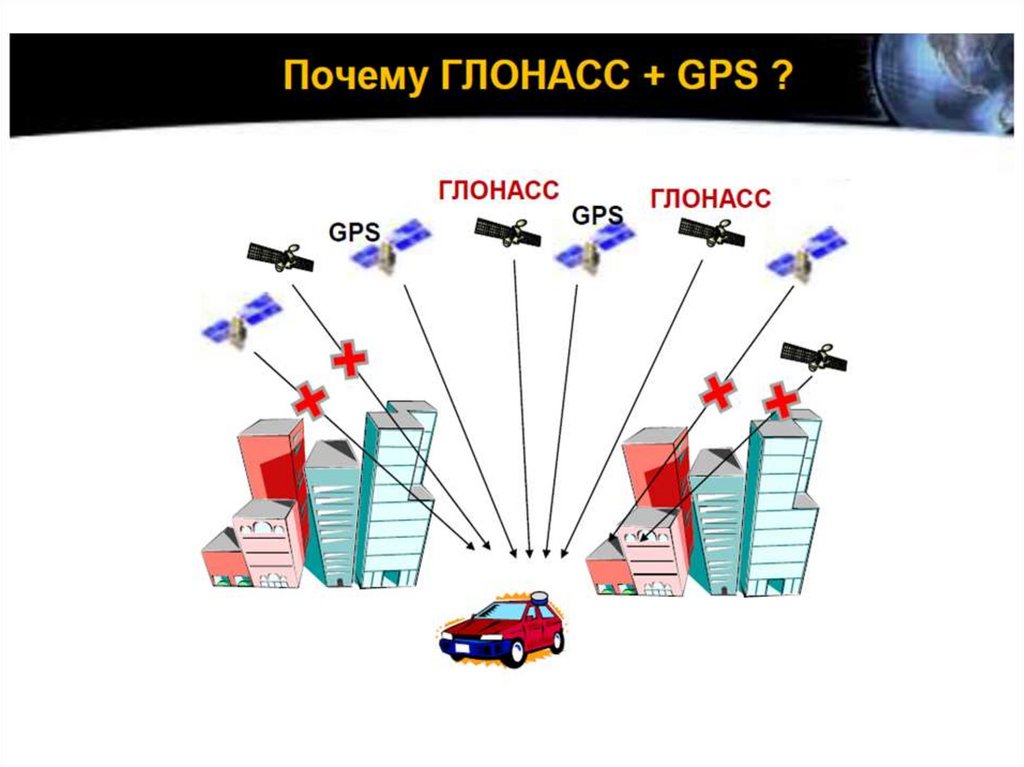
Сигналы от спутников проходят очень большие расстояния(около 20 тыс. км), поэтому их мощность на земной поверхности
очень маленькая (в отличие, например, от мощности сигналов
сотовой связи).
Неровности рельефа местности, здания и даже густые кроны
деревьев являются для таких сигналов препятствием и в области
радиотени прием сигналов от спутников невозможен.
Поэтому существуют проблемы использования спутниковой
навигации в городских условиях, в помещениях, в горной и лесной
местности, в метро и т.д.
Кроме этого, на условия приема сигналов от спутников влияет
солнечная активность и другие факторы, ухудшающие точность
определения координат.
83.
84.
85.
Многолучевость86.
Некоторые проблемы спутниковой навигации могутбыть решены при совместном использовании систем в
рамках проектов GNSS, например:
GPS и ГЛОНАСС
GPS, ГЛОНАСС и Galileo
87.
88.
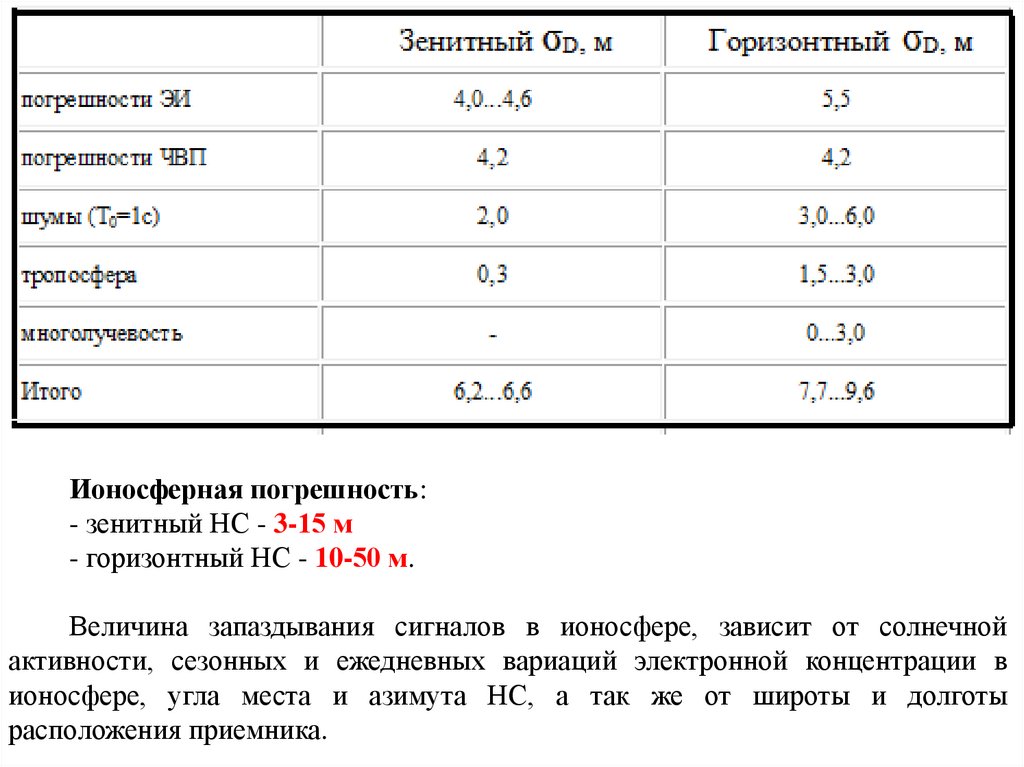
Ионосферная погрешность:- зенитный НС - 3-15 м
- горизонтный НС - 10-50 м.
Величина запаздывания сигналов в ионосфере, зависит от солнечной
активности, сезонных и ежедневных вариаций электронной концентрации в
ионосфере, угла места и азимута НС, а так же от широты и долготы
расположения приемника.
89.
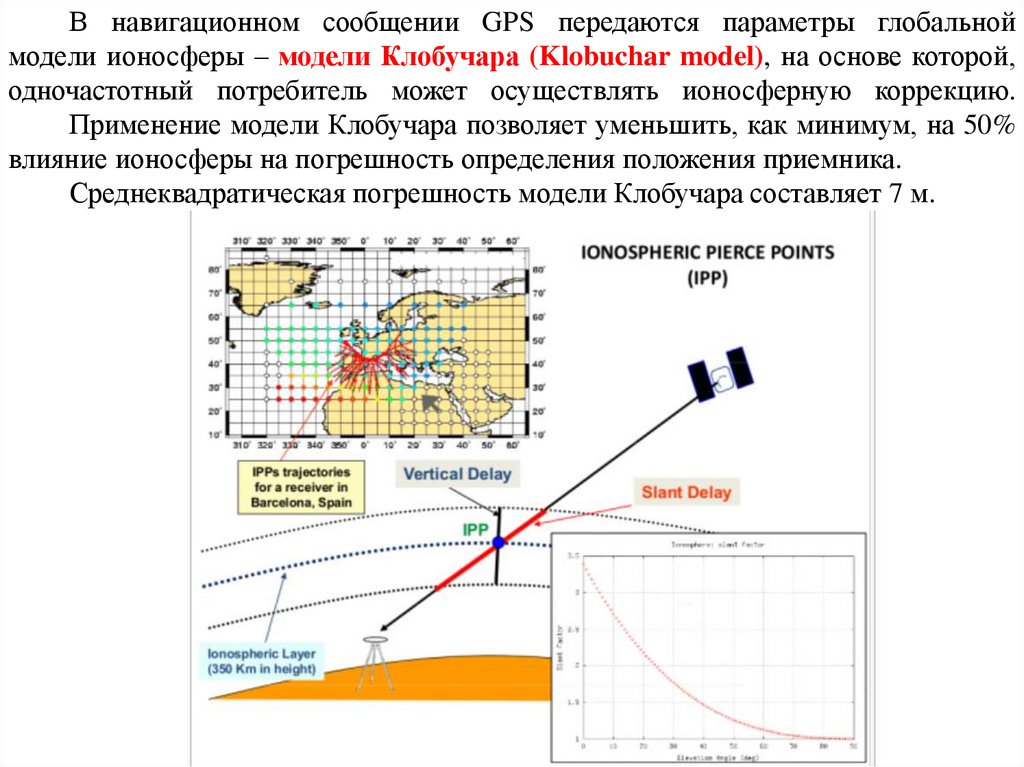
В навигационном сообщении GPS передаются параметры глобальноймодели ионосферы – модели Клобучара (Klobuchar model), на основе которой,
одночастотный потребитель может осуществлять ионосферную коррекцию.
Применение модели Клобучара позволяет уменьшить, как минимум, на 50%
влияние ионосферы на погрешность определения положения приемника.
Среднеквадратическая погрешность модели Клобучара составляет 7 м.
90.
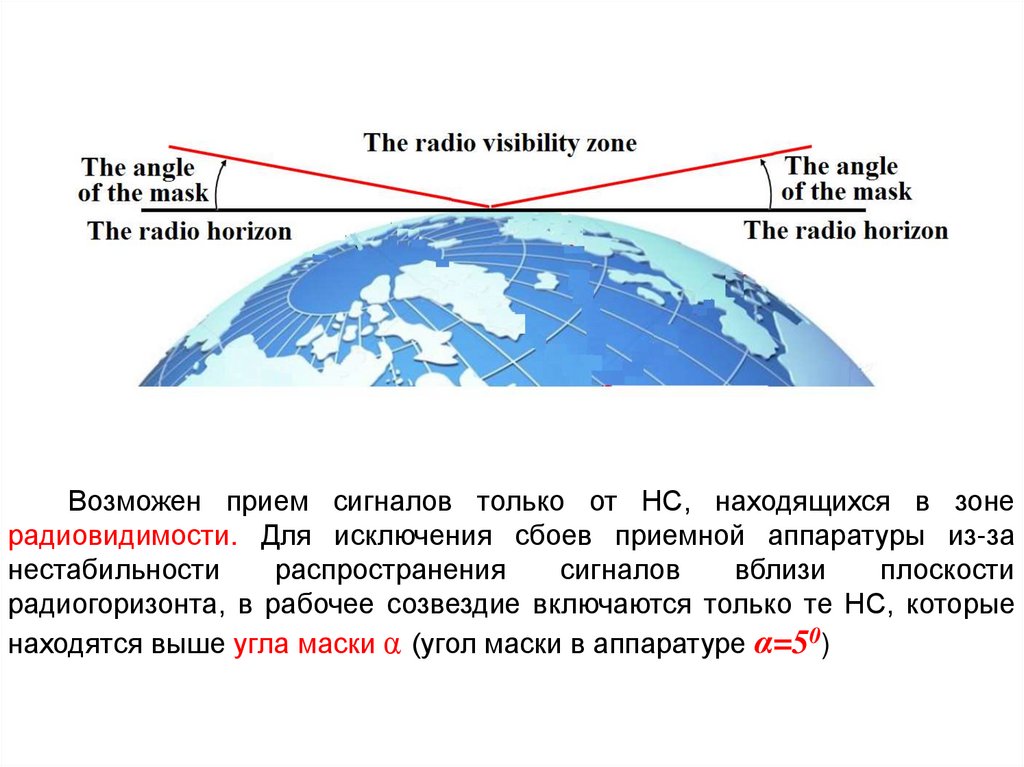
Возможен прием сигналов только от НС, находящихся в зонерадиовидимости. Для исключения сбоев приемной аппаратуры из-за
нестабильности
распространения
сигналов
вблизи
плоскости
радиогоризонта, в рабочее созвездие включаются только те НС, которые
находятся выше угла маски α (угол маски в аппаратуре α=50)
91.
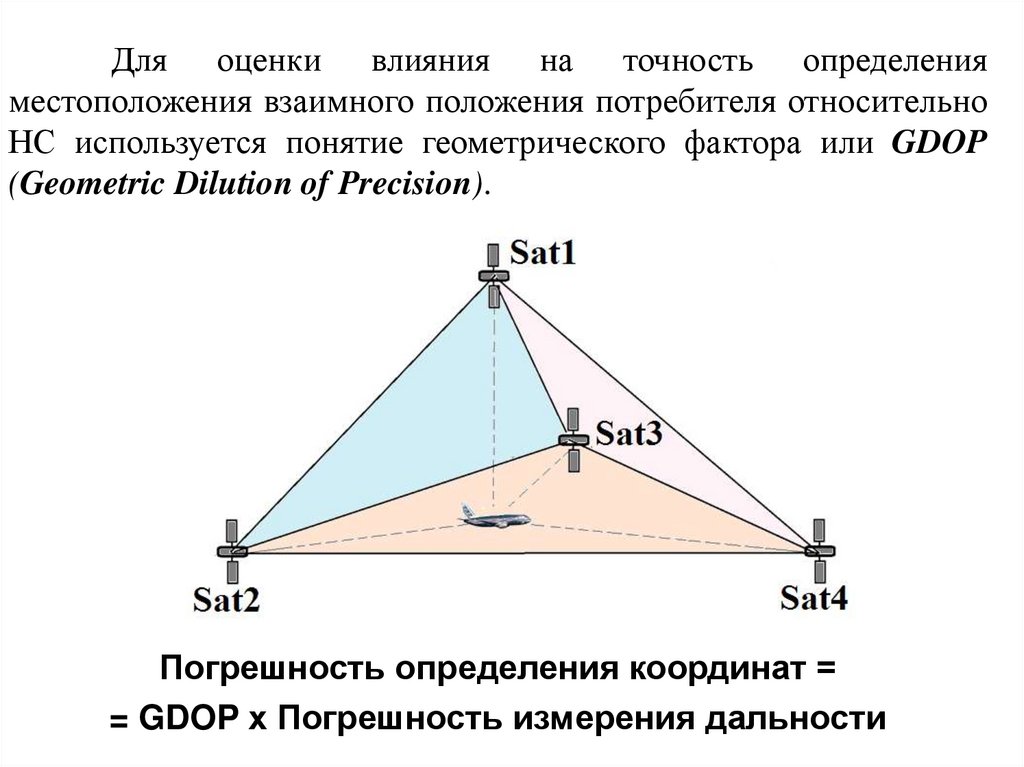
Для оценки влияния на точность определенияместоположения взаимного положения потребителя относительно
НС используется понятие геометрического фактора или GDOP
(Geometric Dilution of Precision).
Погрешность определения координат =
= GDOP х Погрешность измерения дальности
92.
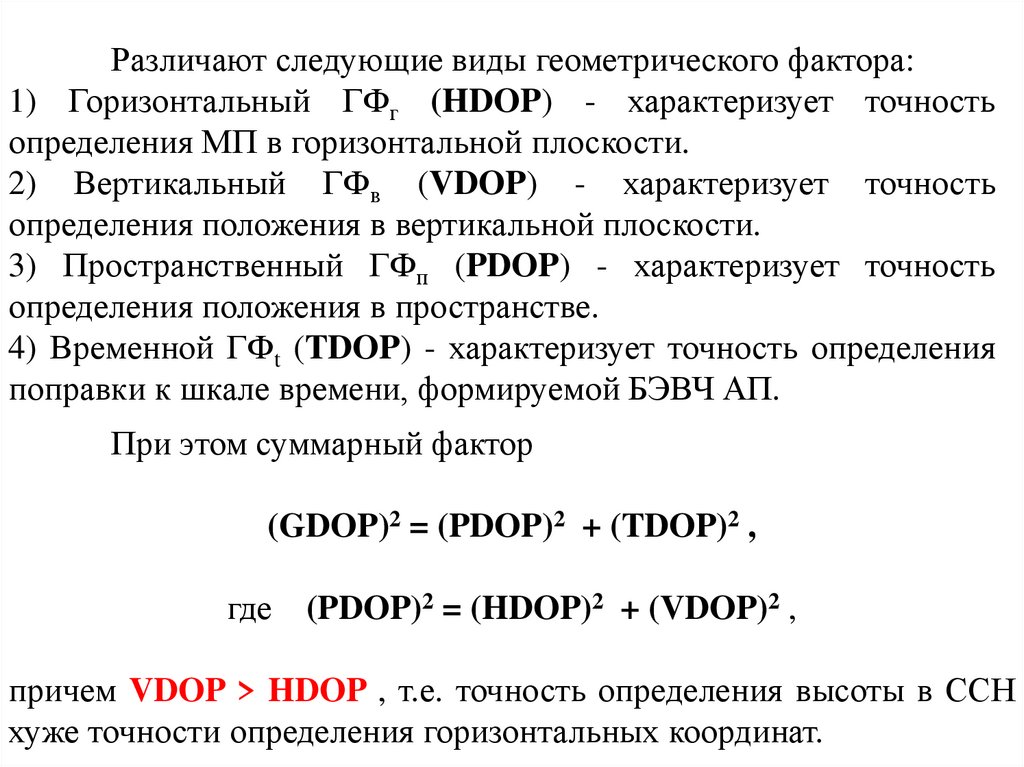
Различают следующие виды геометрического фактора:1) Горизонтальный ГФг (HDOP) - характеризует точность
определения МП в горизонтальной плоскости.
2) Вертикальный ГФв (VDOP) - характеризует точность
определения положения в вертикальной плоскости.
3) Пространственный ГФп (PDOP) - характеризует точность
определения положения в пространстве.
4) Временной ГФt (TDOP) - характеризует точность определения
поправки к шкале времени, формируемой БЭВЧ АП.
При этом суммарный фактор
(GDOP)2 = (PDOP)2 + (TDOP)2 ,
где (PDOP)2 = (HDOP)2 + (VDOP)2 ,
причем VDOP > HDOP , т.е. точность определения высоты в ССН
хуже точности определения горизонтальных координат.
93.
Значение ГФ зависит от числа НС, находящихся в зоневидимости, и их расположения относительно определяющегося
объекта
Параметры
Число видимых НС (N)
4
5
6
7
8
РN
1
1
1
1
0,91
HDOP
1,41
1,26
1,15
1,03
0,95
VDOP
2,0
1,75
1,7
1,61
1,6
TDOP
1,13
1,03
1,03
0,95
0,93
PDOP
2,45
2,16
2,05
1,91
1,86
GDOP
2,69
2,39
2,3
2,13
2,08
РN – вероятность наблюдения количества спутников
94.
95.
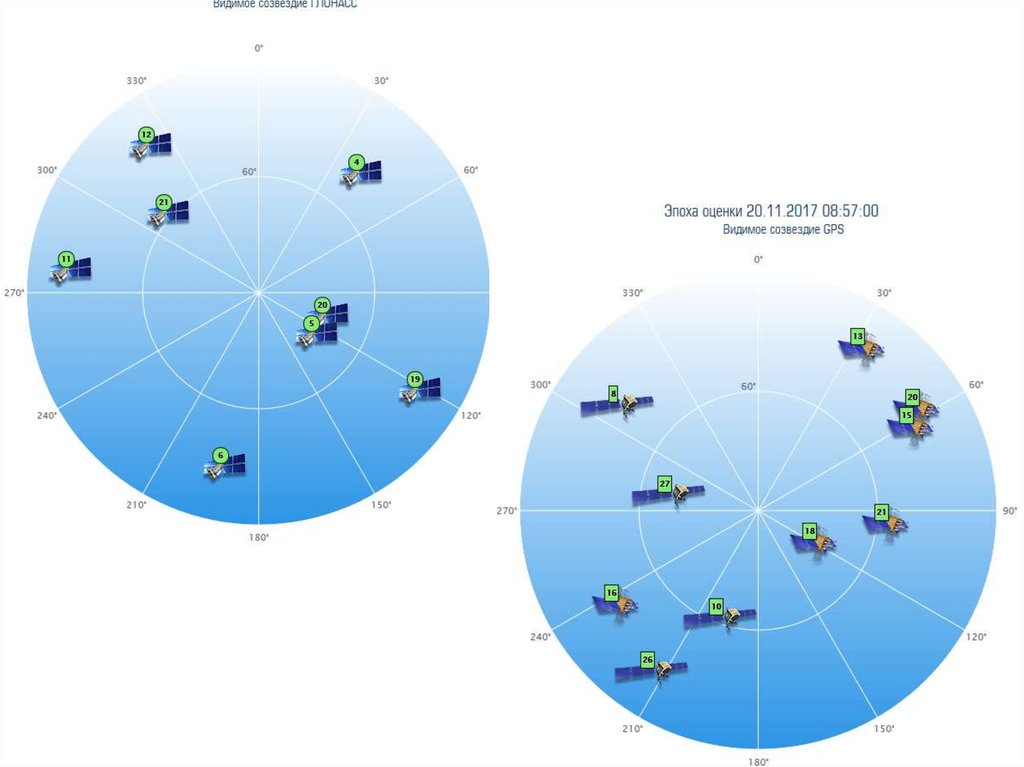
96.
15.10.2020 GPS+QZSS15.10.2020 GPS
15.10.2020 ГЛОНАСС
15.10.2020 BEIDOU
97.
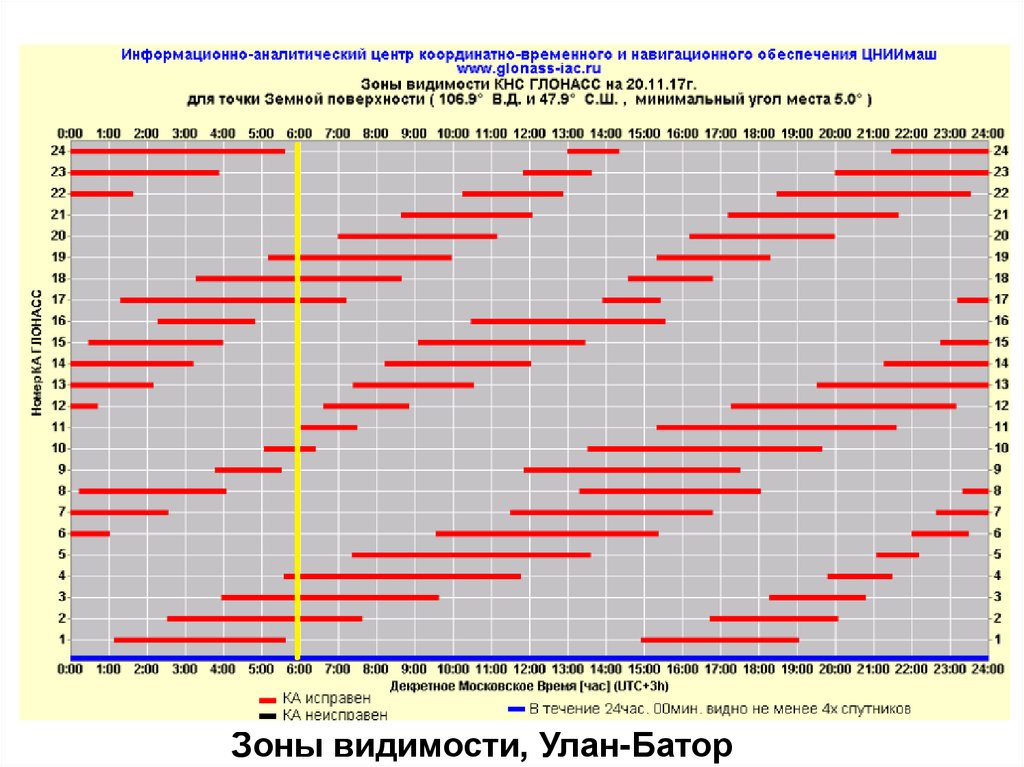
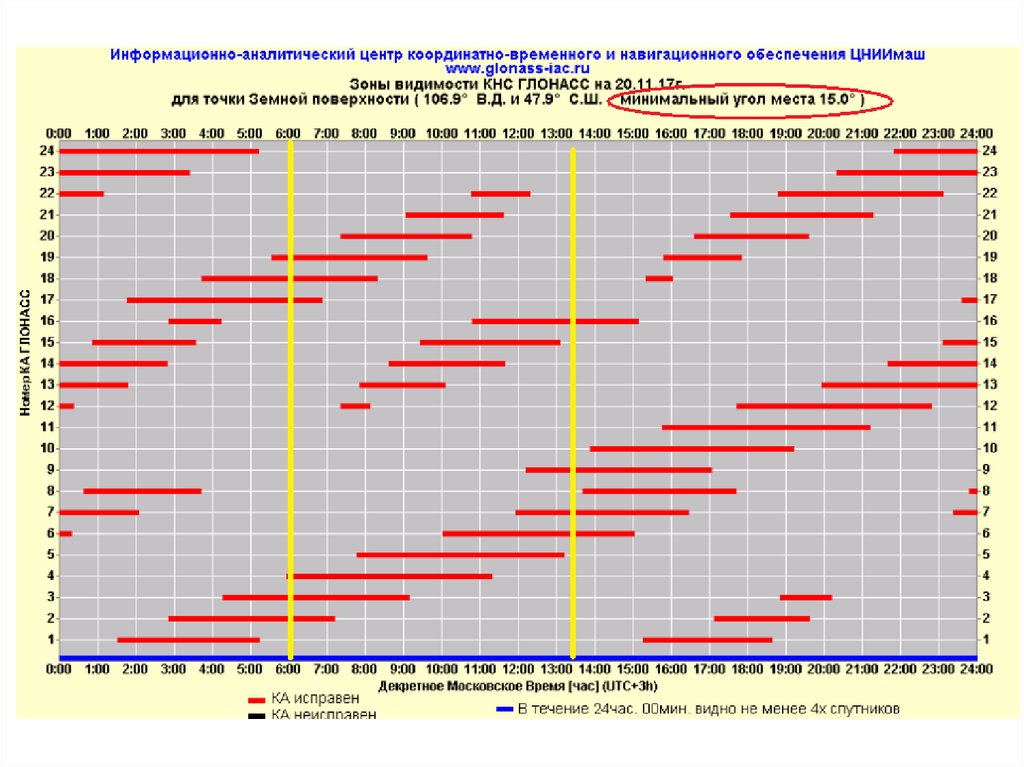
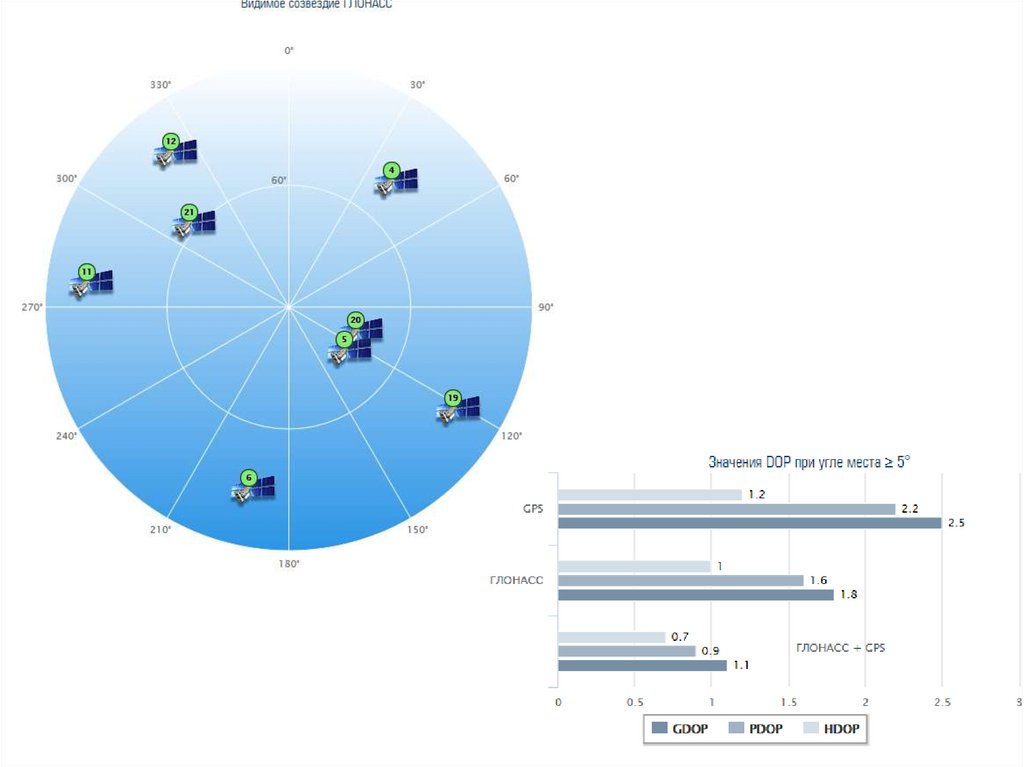
Зоны видимости, Улан-Батор98.
99.
100.
101.
102.
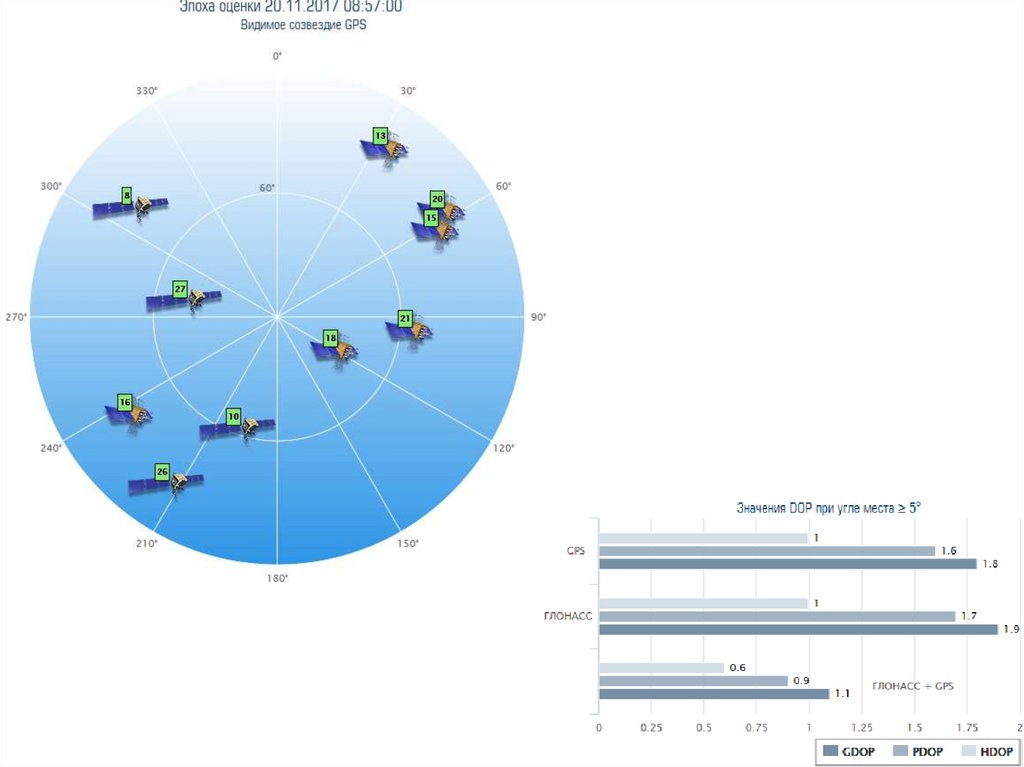
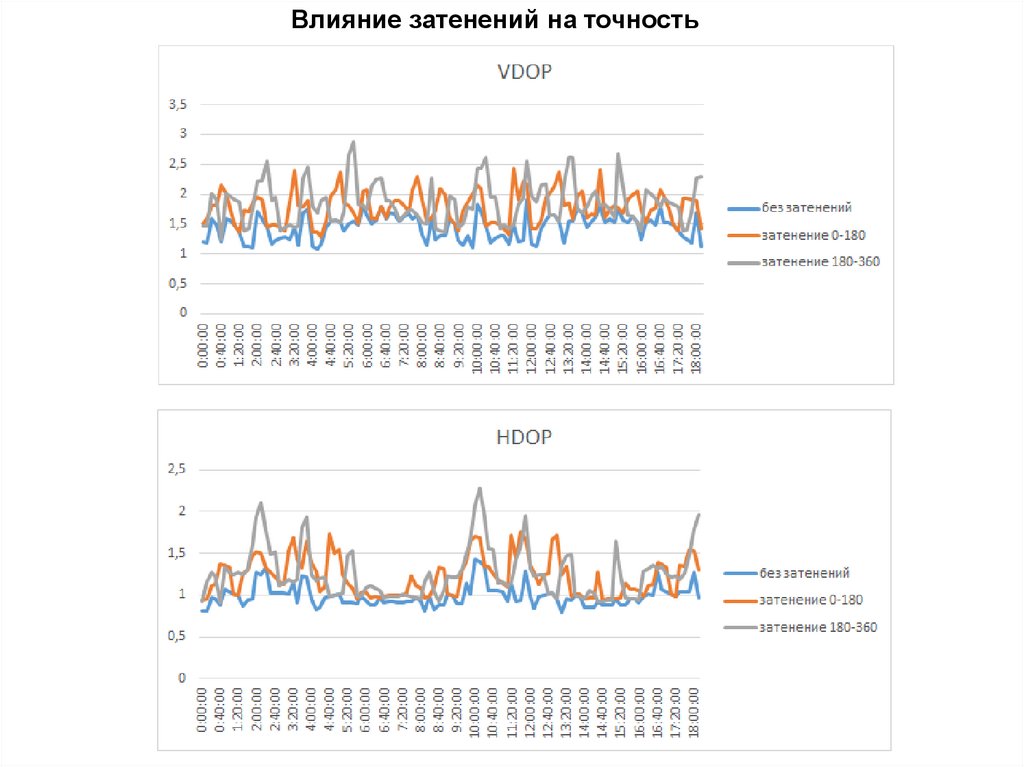
Влияние затенений на точность103.
7. Повышение точности ССН при работев дифференциальном режиме
104.
Дифференциальныеподсистемы
называют
также
функциональными дополнениями.
В зависимости от способа передачи поправок потребителям
различают функциональные дополнения:
- спутникового базирования;
- наземного базирования.
В зависимости от охватываемой территории
поверхности различают:
широкозонные дифференциальные подсистемы;
региональные дифференциальные подсистемы;
локальные дифференциальные подсистемы.
земной
105.
УСЛОВИЯ ИСПОЛЬЗОВАНИЯ GNSS ДЛЯ ВЫПОЛНЕНИЯ ПОЛЕТОВ ВС ГАНЕПРАВИЛЬНО
ГЛОНАСС
GPS
GALILEO
ПРАВИЛЬНО
ГЛОНАСС
GPS
GALILEO
ФУНКЦИОНАЛЬНЫЕ
ДОПОЛНЕНИЯ
(КОНТРОЛЬ ЦЕЛОСТНОСТИ)
106.
ФУНКЦИОНАЛЬНЫЕ ДОПОЛНЕНИЯ GNSS ИКАО(СРЕДСТВО ОБЕСПЕЧЕНИЯ ЦЕЛОСТНОСТИ, НЕПРЕРЫВНОСТИ
И ПОВЫШЕНИЯ ТОЧНОСТИ)
SBAS
GBAS
GRAS
(НА САМОЛЕТЕ)
(НАЗЕМНАЯ
АЭРОДРОМНАЯ)
(НАЗЕМНАЯ
ТРАССОВАЯ)
(НАЗЕМНЫЙ И
КОСМИЧЕСКИЙ
СЕГМЕНТЫ)
Комплексирование
с датчиками
другой физической
природы
(ИНС, баровысотомер и др.)
Использование
геодезической
привязки антенн
наземной
станции
(передача данных
по УКВ-каналу)
Использование
геодезической
привязки антенн
наземной
станции
(передача данных
по УКВ-каналу)
Использование
геостационарных
спутников
и сети наземных
станций
(WAAS – США,
EGNOS – Европа
СДКМ- Россия)
ABAS
107.
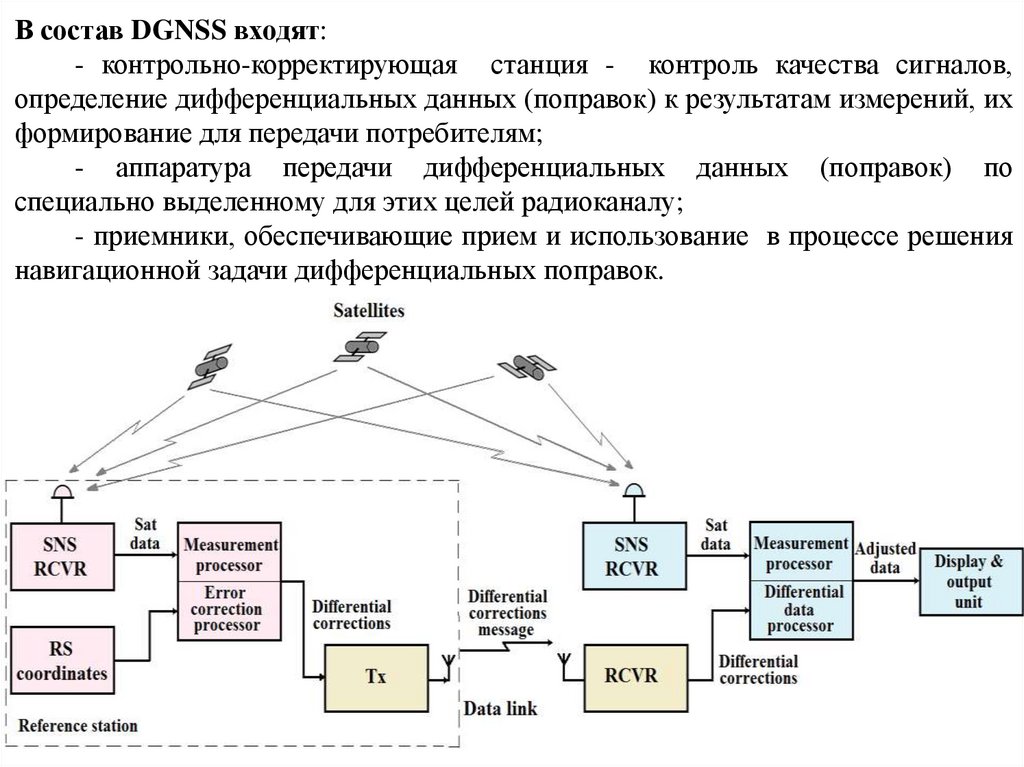
В состав DGNSS входят:- контрольно-корректирующая станция - контроль качества сигналов,
определение дифференциальных данных (поправок) к результатам измерений, их
формирование для передачи потребителям;
- аппаратура передачи дифференциальных данных (поправок) по
специально выделенному для этих целей радиоканалу;
- приемники, обеспечивающие прием и использование в процессе решения
навигационной задачи дифференциальных поправок.
108.
Сигналыспутников
ССН
Линия передачи данных
СРНС приемник
Измерительн.
блок
ССН
Процессор
измерений
Генератор
поправок
Форматир.
устройство
данных
Модулятор
Передатчик
линии передачи
Координаты
опорной
станции
Сообщения с
дифференциальными
поправками
Блок-схема оборудования опорной станции дифференциальной
СРНС
109.
характеризуютсяширокой зоной действия (до 5000 км), в которой пользователь принимает
дополнительную информацию от передатчика, установленного на спутнике, что
позволяет обеспечить зону покрытия до нескольких тысяч км. Системы содержат
наземные ККС, распределенные на достаточно обширной территории.
SBAS (Satellite Based Augmentation System)
Примеры SВАS:
WААS (Wide Area Augmentation System), обслуживающая территорию США,
включая штат Аляска;
EGNOS (European Geostationary Navigation Overlay Service) – Европейская
широкозонная подсистема спутниковой навигации;
GAGAN (GPS Aided Geo Augmented Navigation), дополненная геостационарным
спутником - в районе Индийского полуострова;
MSAS (Multi-Functional Satellite Based Augmentation System – на Дальнем
Востоке.
СДКМ (система диф. коррекции и мониторинга) - Россия
110.
111.
Принцип работы системы WAAS на территории США112.
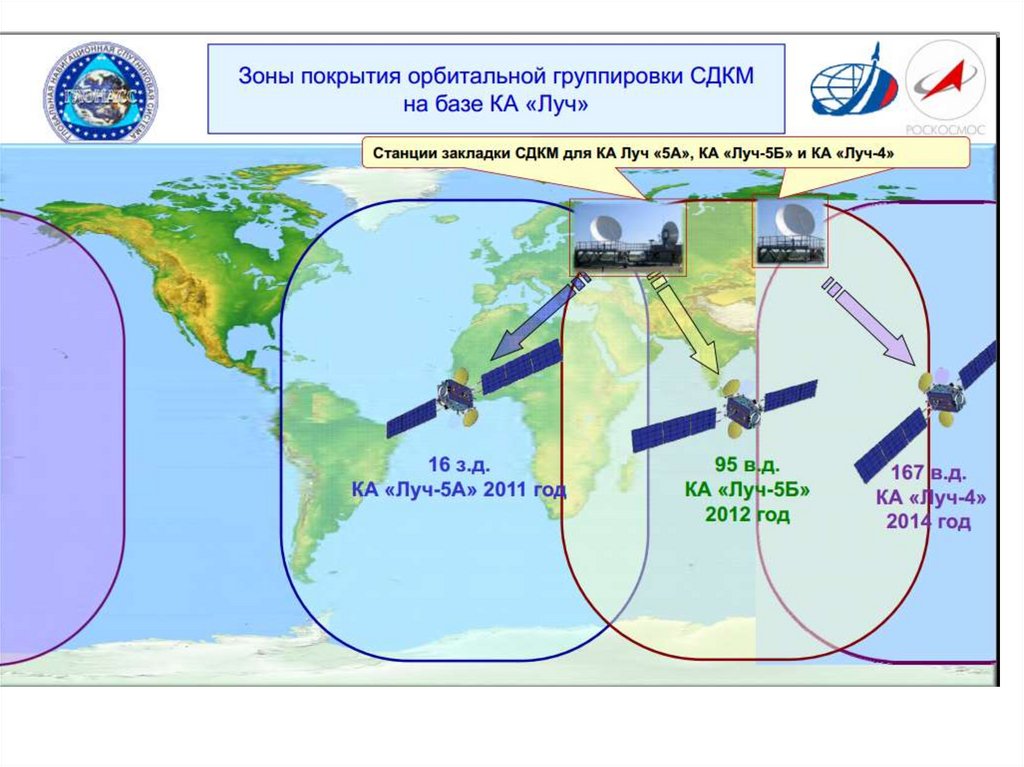
ЗАДАЧИ СДКМ• Формирование
и
оперативная
доставка
потребителям
корректирующей информации и данных о состоянии навигационных
полей ГЛОНАСС.
• Удовлетворение требований ИКАО к SBAS (в том числе посадки A,
APV, вплоть до категории I);
Авиация использует СДКМ для обеспечения специальных
маршрутных полетов и посадки, в том числе на необорудованные
аэродромы и площадки.
СОСТАВ СДКМ
Геостационарные космические аппараты:
«Луч-5А» (2011г.), Луч-5Б»(2012 г.) и «Луч-5В»(2014 г.);
Контрольные станции:
Менделеево, Пулково, Кисловодск, Норильск, Иркутск,
Петропавловск-Камчатский, Хабаровск, Новосибирск, Геленджик (1-й
этап); Тикси, Билибино, Магадан, Южно-Сахалинск, Якутск,
Владивосток, Свердловск. обл., Ловозеро, Воронеж, Печеры (2-й
этап).
Проблема – удовлетворение требований по доступности и др.
113.
Система дифференциальной коррекциии мониторинга
Геостационарный
ИСЗ
Спутники ГЛОНАСС и
GPS
Точность в абсолютном режиме
Точность
в дифф.
режиме
Центр СДКМ
Сеть пунктов
сбора
измерений
ПОТРЕБИТЕЛИ
Сеть БИВС,
БИС и ЗИС
Центр управления
системой
БИВС - беззапросная измерительно-вычислительная система
БИС - беззапросная измерительная система ; ЗИС - закладочно-измерительная станция
114.
115.
116. Система дифференциальной коррекции и мониторинга
Региональные (GRAS - Ground-based Regional Augmentation) илокальные (LAAS – Local Area Augmentation System) дифференциальные
подсистемы включает наземную подсистему (GBAS) и бортовую подсистему.
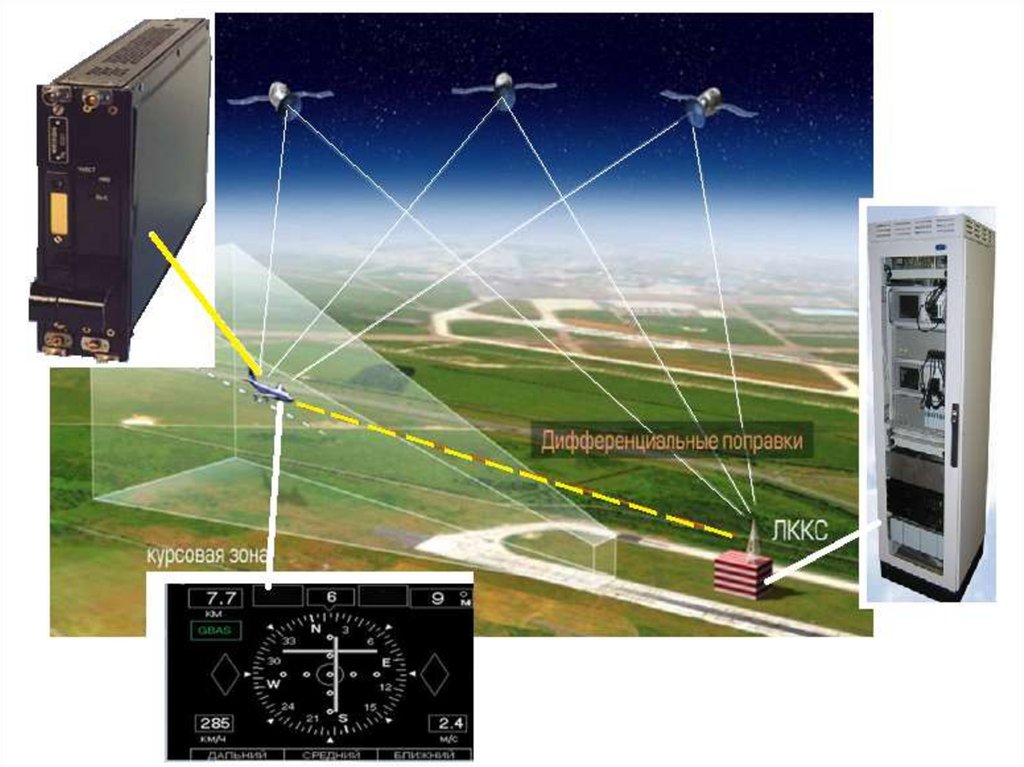
GBAS (Ground Based Augmentation System) – система функционального
дополнения, в которой пользователи принимают корректирующую информацию
непосредственно от наземного передатчика на удалениях до 1-2 тыс. км.
В том случае, когда GBAS предназначена для обслуживания только в районе
аэродрома, то такая система имеет локальную зону действия и именуется как
система с ограниченной зоной действия (LAAS).
LAAS (ЛДПС) имеет радиус действия от 50 до 220 км и включает обычно
одну ККС.
Локальные подсистемы обеспечивают точность, удовлетворяющую САТ I
посадочного метеоминимума, а в перспективе – и более сложные категории.
Примером такой системы в России является сертифицированная ЛККСА-А2000, которой оснащены более 60 аэродромов
117.
GBAS может иметь в своем составе одну или несколько ККС(наземных подсистем GBAS). Наземная подсистема передает
корректирующую информацию к дальномерным сигналам СРНС
посредством ОВЧ-радиовещательной передачи цифровых данных в
бортовую подсистему.
Примеры таких GBAS:
- Австралийская наземная региональная система дополнения
(GRAS – Ground-based Regional Augmentation), которая охватывает
территории Австралии и Новой Зеландии;
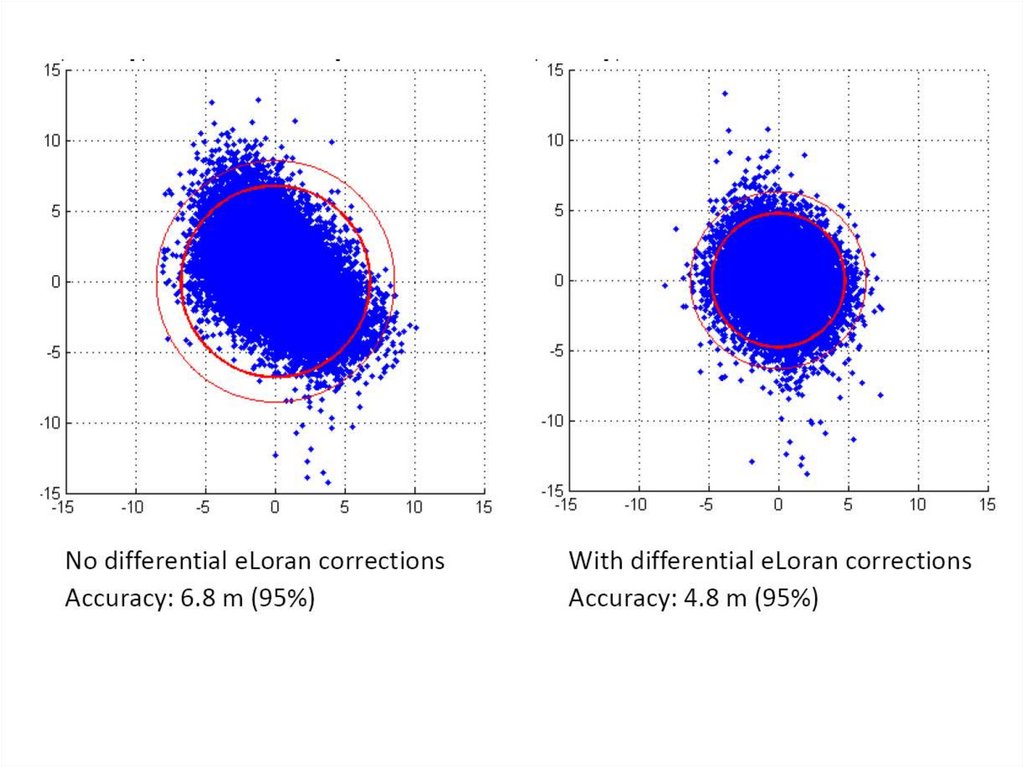
- европейская система Еврофикс, в которой для передачи
поправок потребителям используются
передающие станций
импульсно-фазовой РСДН Loran-C (eLoran).
118.
119.
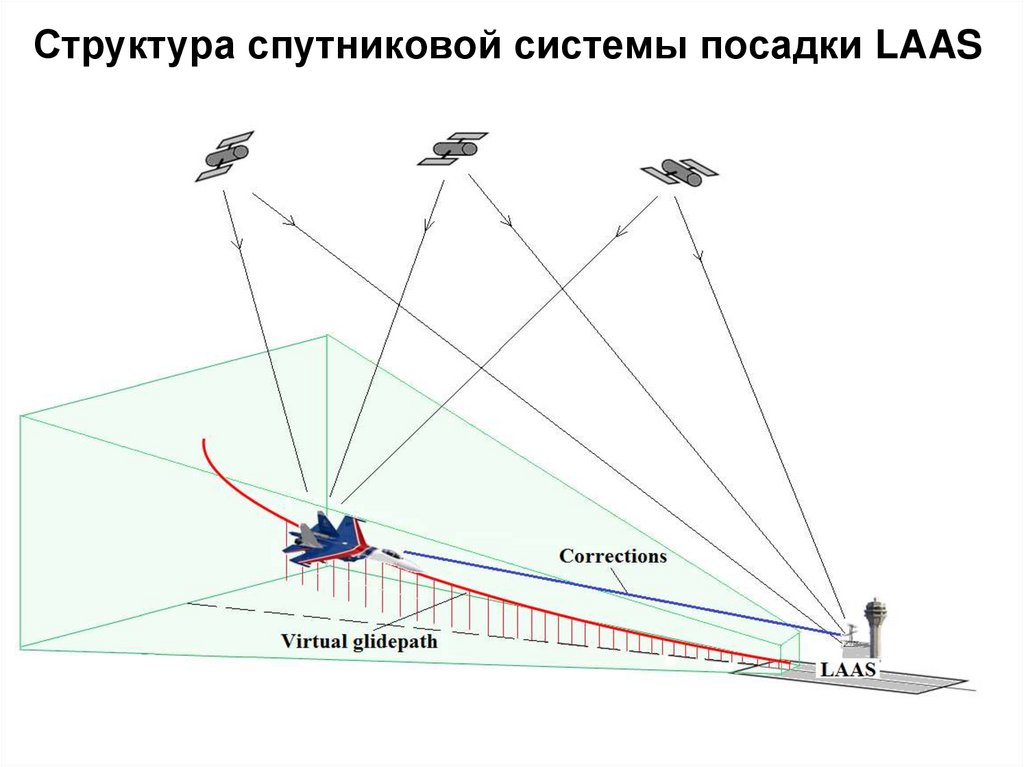
Структура спутниковой системы посадки LAAS120.
121.
Структура спутниковой системы посадки LAASБортовое
оборудование
Навигационные спутники
GLONASS и GPS
Сигналы
спутников
ГЛОНАСС и
GPS
VDB канал
передачи
данных
Конечный
участок
траектории
захода
Наземная станция
GBAS ЛККС-А-2000
122. Структура спутниковой системы посадки LAAS
Внешний вид и технические характеристики ЛККС-А-2000№
п/п
Наименование характеристики
Класс точности формирования
дифпоправок (GAD)
2. Используемые системы GNSS
3. Формат выдаваемых данных
- SARPs ICAO
- RTCA DO 217 (опция)
4. Период обновления и выдачи
данных
- дифференциальные данные
- данные опорной станции
- идентификатор ЛККС
- блок FAS
- прогноз готовности спутников
5. Рабочая частота передачи данных
по радиоканалу
6 Мощность ПРД VDB
8. Время готовности к работе
9. Зона действия для посадки
- в горизонтальной плоскости
- в вертикальной плоскости
Зона действия для навигации
10. Целостность с функцией SQM
Время предупреждения
11. Непрерывность
12. Готовность
13. Электропитание
Единица
1.
Норматив
B2
ГЛОНАСС, GPS
да
да
сек
сек
сек
сек
сек
МГц
0,5
1,0
15,0
15,0
15,0
108,00 – 117,995
вт
сек
50
< 160
км
град
≥ 37
≥7,0
радиовидимость
1-2×10-7
<6
1-8×10-6 любые 15 с
0,99 – 0,9999
380/220 ±10%, 50 ±0,1
сек
В, Гц
123.
Требования ИКАО к характеристикам сигнала GNSS в пространствеТочность
в
плоскости
(95%)
Точность по
вертикали
(95%)
Время
Целостно
предупре Непрерывность
сть
ждения
Готовность
На маршруте
3,7 км
Не
назначена
1 1 10-7/
час
5 мин
1 1 10-4/ час –
1 1 10-8/ час
0,99 – 0,99999
На маршруте, в зоне
аэродрома
0,74 км
Не
назначена
1 1 10-7/
час
15 с
1 1 10-4/ час –
1 1 10-8/ час
0,99 – 0,99999
Начальный,
промежуточный,
неточный заход (NPA),
вылет
220м
Не
назначена
1 1 10-7/
час
10 с
1 1 10-4/ час –
1 1 10-8/ час
0,99 – 0,99999
Заход с
наведением по вертикали
(APV-I)
16,0м
20 ,0м
1 2 10-7
на заход
10 с
1 8 10-6
в любые 15с
0,99 – 0,99999
16,0м
8,0м
1 2 10-7
на заход
6с
1 8 10-6
в любые 15с
0,99 – 0,99999
16м
6,0 – 4,0м
1 2 10-7
на заход
6с
1 8 10-6
в любые 15с
0,99 – 0,99999
6, 9м
2,0 м
1 1 10-9
на заход
2с
1 4 10-6
в любые 15с
0,99 – 0,99999
6, 1 м
2,0 м
1 1 10-9
на заход
2с
1 4 10-6
в любые 15с
0,99 – 0,99999
Типовая операция
Заход с наведением по
вертикали
(APV-II)
Точный заход на посадку
по кат. I
(Н=60 м)
Точный заход на посадку
по кат. II
(Н=30м)
Точный заход на посадку
по кат. IIIА
(Н=15 м)
Без применения функциональных дополнений GNSS не обеспечивают требования
ИКАО на всех этапах полета
124. Структура спутниковой системы посадки LAAS
Принципы функционирования ЛККС (GBAS )GPS satellite
GLONASS satellite
Защитный вертикальный
уровень
Целостность, блок посадочных
данных (FAS),
дифференциальные поправки
Итоговая точность < 1 м,
целостность 10-9
Ground Processor
Ground Data Radio
Data Link Radio
Только применение ЛККС (GBAS) обеспечивает
выполнение всех типов точных заходов
127
125.
Вид самолета-лаборатории Ил-976 при выполнении директорного заходана посадку по GLS
126.
Размещение бортового оборудования GLS в кабине самолета и индикациякурсо-глиссадного отклонения в полете
129
127. Принципы функционирования ЛККС (GBAS )
Отклонения самолета от посадочной траектории при выполнениидиректорного захода на посадку по сигналам ЛККС
128.
ПРИМЕНЕНИЕ ПСЕВДОСПУТНИКОВ129.
130.
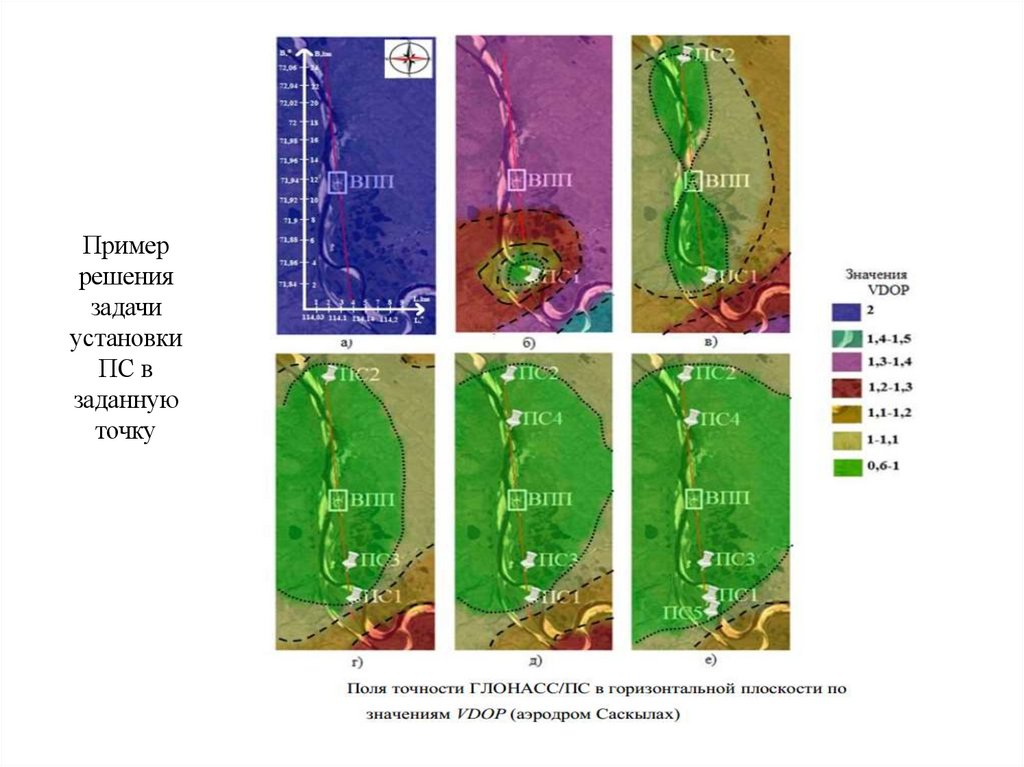
Примеррешения
задачи
установки
ПС в
заданную
точку
131.
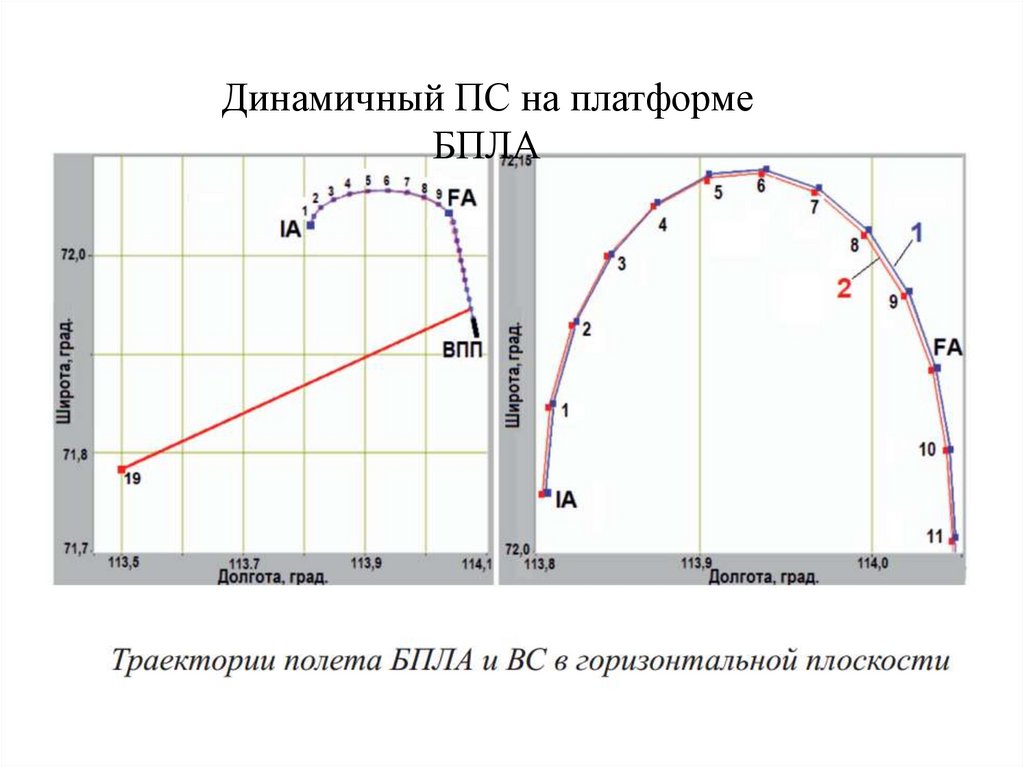
Динамичный ПС на платформеБПЛА