







 Программирование
ПрограммированиеПохожие презентации:

")








Swarm navigation with formation control
1. Swarm navigation with formation control
SWARMNAVIGATION
WITH
FORMATION
CONTROL
Second milestone : PROGRESS
Presented by
- Florian MUANDA
- Shakirova ELZA
- Jorge MEDINA
2. Recap – First milestone
RECAP – FIRSTMILESTONE
Last time, we covered the following:
-
Topic (definition and areas of application)
Problem Statement
Methodology
Hardware requirements
Software requirements
2
3. METHODOLOGY
System SetupSimulation Environment
Configure multiple TurtleBot3 robots
with ROS Noetic and establish network
communication using namespaces
Use Gazebo to test robot behaviors
Inter-Robot
Exchange
positions or goals using
Communication
ROS topics or shared transform
frames for coordination
Obstacle avoidance
Use LIDAR data and move_base to
detect and avoid obstacles
dynamically while preserving form
Map building and Localization
Generate a map using gmapping or
slam_toolbox and deploy AMCL for
localization
Formation Control Design
Implement a custom ROS node to
maintain a specific formation and
calculate relative positions
Testing and Evaluation
Validate in simulation and then
deploy to real TurtleBots
3
4. TIMELINE
First Milestone: 08.05.2025Second Milestone: 12.06.2025
Obstacle avoidance: 19.06.2025
Inter-communication: 19.06.2025
Testing: 19.06.2025
Robot integration: 26.06.2025
4
5. Second milestone
SECONDMILESTONE
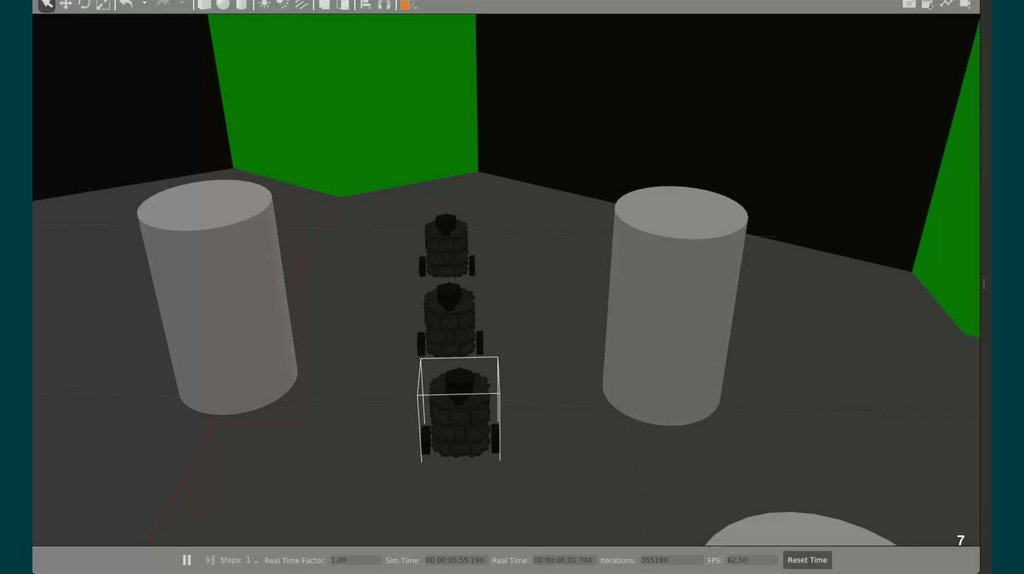
Today, for our second milestone, we will cover the work done
since our last presentation, primarily focusing on the
simulation in Gazebo. What we were able to do was
simulate a Triangle formation and a line shape.
5
6. Quote
Short simulation6
7.
Using Docker, we were ab7
8. NExT STeps
NEXT STEPSAdd a detection algorithm for person following
Check on the robot
Add obstacle
avoidance
Improve control
Clarify in different cases who is the leader
and the followers
8
9. THANK YOU questions?
THANK YOUQUESTIONS?
9