

 Информатика
ИнформатикаПохожие презентации:










Система обнаружения и автоматического сопровождения воздушных объектов
1.
МИРЭА - РОССИЙСКИЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТИНСТИТУТ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
КАФЕДРА АВТОМАТИЧЕСКИХ СИСТЕМ
///
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ
РАБОТА
на тему: «Система обнаружения и автоматического сопровождения воздушных объектов»
Выполнил: студент 4 курса группы
КВБО-06-21 Манаширов Максим Иосифович
Руководитель: доктор технических наук, профессор
Филимонов Александр Борисович
Москва 2025
1
2.
Цель и задачиЦелью является разработка алгоритмов видеонаблюдения, обеспечивающих
обнаружение, классификацию и автоматическое сопровождение воздушных
объектов с использованием YOLOv7.
Задачи:
1.Подготовка набора данных, содержащий изображения различных
воздушных объектов, для обучения модели YOLOv7.
2.Обучить модель YOLOv7 для классификации воздушных объектов.
3.Разработать алгоритм автоматического сопровождения(отслеживания)
обнаруженных воздушных объектов в видеопотоке, используя результаты
работы YOLOv7.
2
3.
ВведениеРабота посвящена разработке и исследованию
алгоритмов обнаружения и автоматического
сопровождения
воздушных
объектов
–
комплексному решению, предназначенному для
мониторинга
воздушного
пространства,
обеспечения безопасности полетов и защиты
объектов от несанкционированного использования
воздушных судов.
Разрабатываемые алгоритмы объединяют в себе
передовые методы компьютерного зрения и
машинного обучения, позволяя в автоматическом
режиме обнаруживать различные типы воздушных
объектов, классифицировать их и отслеживать их
перемещение в пространстве
3
4.
АктуальностьСовременное воздушное пространство
становится все более насыщенным и
сложным.
Активно
развиваются
беспилотные летательные аппараты
(БПЛА), аэротакси, и другие новые типы
воздушных судов. Это приводит к
увеличению
рисков
столкновений,
несанкционированных полетов и других
инцидентов, что требует разработки
эффективных средств контроля и
мониторинга воздушной обстановки.
4
5.
Обнаружение воздушных объектов сиспользованием YOLOv7
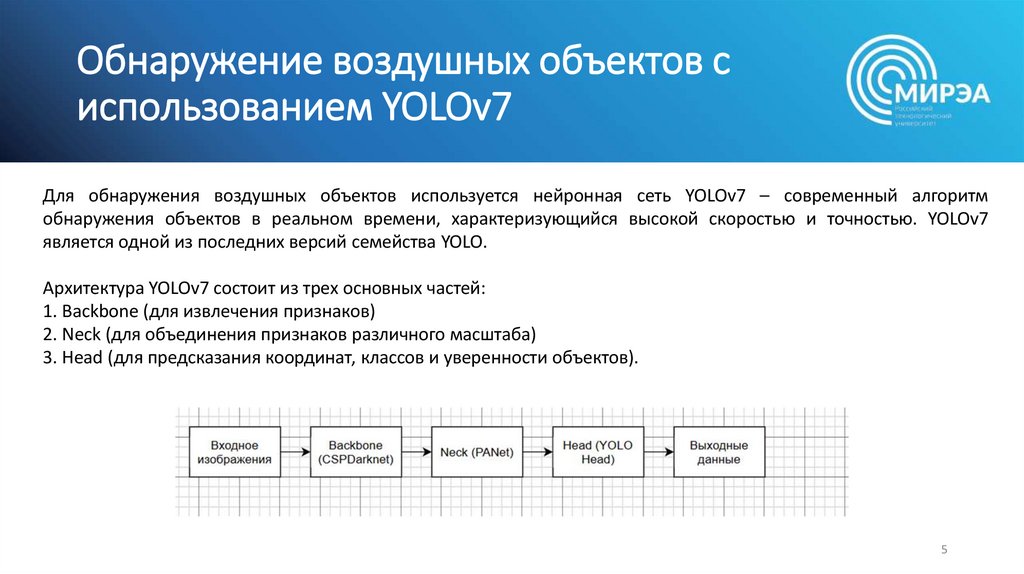
Для обнаружения воздушных объектов используется нейронная сеть YOLOv7 – современный алгоритм
обнаружения объектов в реальном времени, характеризующийся высокой скоростью и точностью. YOLOv7
является одной из последних версий семейства YOLO.
Архитектура YOLOv7 состоит из трех основных частей:
1. Backbone (для извлечения признаков)
2. Neck (для объединения признаков различного масштаба)
3. Head (для предсказания координат, классов и уверенности объектов).
5
6.
Процесс и результаты обучения YOLOv7Обучение нейронной сети YOLOv7 проводилось с использованием весов yolov7.pt. Датасет был описан в
конфигурационном файле data.yaml. Размер входных изображений был установлен в 640 пикселей, размер
батча - 16. Обучение продолжалось в течение 100 эпох на GPU. Для загрузки данных использовалось 2 рабочих
процесса. Результаты обучения сохранялись в директорию /content/drive/MyDrive/yolov7_results под именем
aerial_model. Использовался файл конфигурации гиперпараметров data/hyp.scratch.p5.yaml. Для ускорения
обучения было включено кэширование изображений в оперативной памяти (--cache-images). Разрешена
перезапись существующих результатов обучения (--exist-ok). Чекпоинты модели сохранялись каждые 5 эпох (-save_period 5).
Для оценки качества работы обученной модели YOLOv7 использовались следующие метрики:
1. Precision (точность).
2. Recall (полнота).
3. F1-score (F1-мера).
4. mAP (средняя точность для всех классов).
6
7.
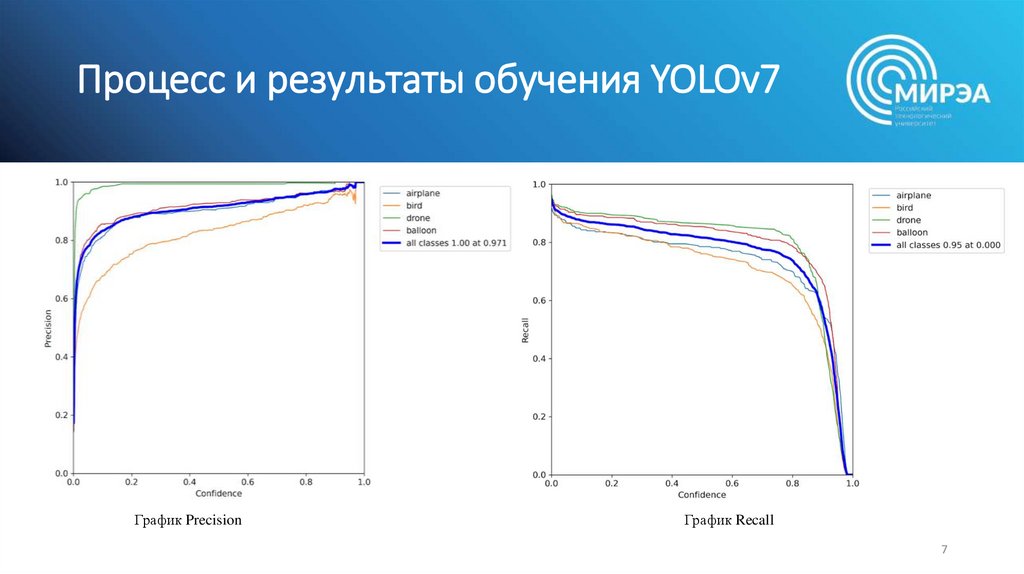
Процесс и результаты обучения YOLOv7График Precision
График Recall
7
8.
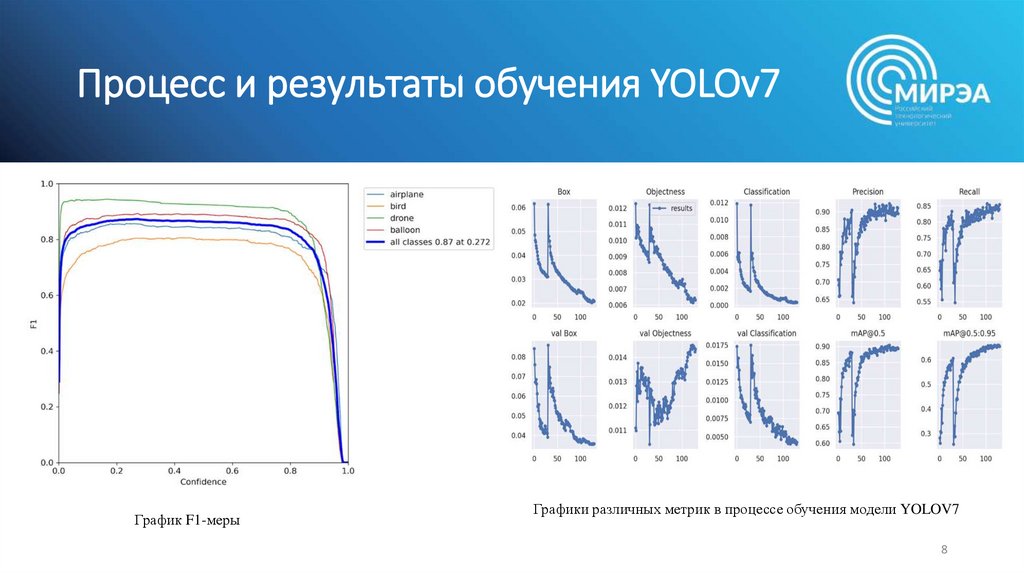
Процесс и результаты обучения YOLOv7График F1-меры
Графики различных метрик в процессе обучения модели YOLOV7
8
9.
Сопровождение воздушных объектов сиспользованием DeepSort
После обнаружения воздушных объектов на каждом
кадре видеопотока возникает задача их устойчивого
сопровождения, то есть отслеживания перемещения
каждого объекта во времени. Это необходимо для
анализа траекторий, предотвращения потери объектов и
обеспечения надежной работы системы мониторинга
воздушного пространства.
Для решения задачи сопровождения в данной работе
используется алгоритм DeepSORT (Deep Simple Online and
Realtime Tracking).
9
10.
Сопровождение воздушных объектов сиспользованием DeepSort
DeepSORT
использует
результаты
обнаружения
YOLOv7
(ограничивающие рамки и классы объектов) для инициализации и
обновления траекторий объектов.
При реализации алгоритма DeepSORT были использованы следующие
параметры:
1. Максимальный возраст траектории (max_age) установлен равным 30
кадрам
2. Минимальное количество обнаружений для подтверждения
траектории (n_init) - 3.
3. Порог уверенности (0.3): Объекты, обнаруженные YOLOv7 с
уверенностью ниже 30%, отбрасываются. Это влияет на количество
ложных срабатываний.
10
11.
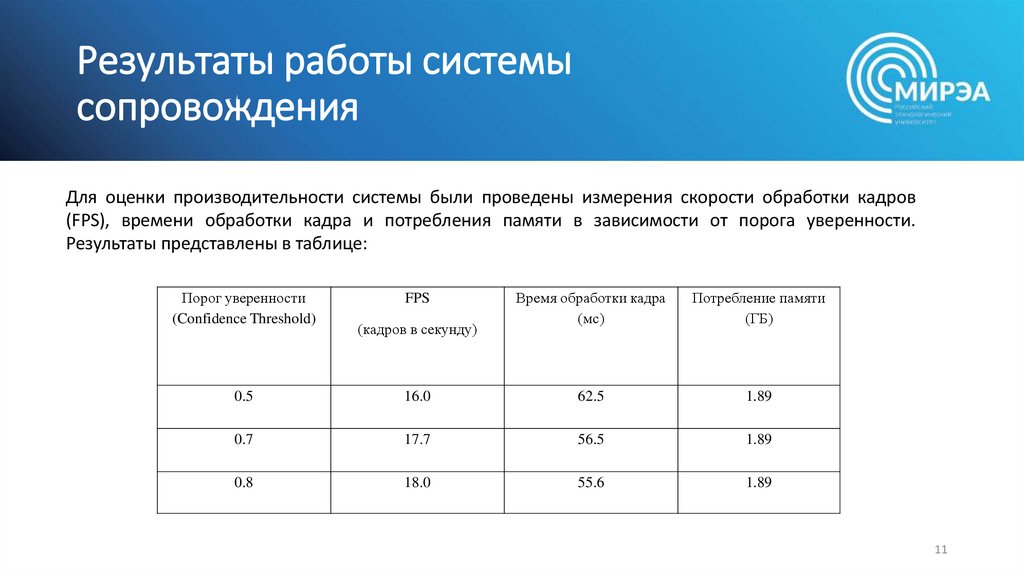
Результаты работы системысопровождения
Для оценки производительности системы были проведены измерения скорости обработки кадров
(FPS), времени обработки кадра и потребления памяти в зависимости от порога уверенности.
Результаты представлены в таблице:
Порог уверенности
(Confidence Threshold)
FPS
(кадров в секунду)
Время обработки кадра
(мс)
Потребление памяти
(ГБ)
0.5
16.0
62.5
1.89
0.7
17.7
56.5
1.89
0.8
18.0
55.6
1.89
11
12.
Результаты работы системысопровождения
12
13.
Результаты моделирования13
14.
Компьютерная модель цифровой системы14
15.
Результаты моделирования15
16.
ЗаключениеВ ходе работы
разработаны алгоритмы видеонаблюдения для обнаружения,
классификации и автоматического сопровождения воздушных объектов с
использованием модели YOLOv7. Решение задач, включающих подготовку набора
данных, обучение модели и разработку алгоритма отслеживания, позволило создать
эффективную систему, способную работать в реальном времени.
Результаты работы демонстрируют, что YOLOv7 является мощным инструментом для
задач компьютерного зрения, обеспечивая высокую точность обнаружения и
классификации объектов. Разработанный алгоритм сопровождения расширяет
функциональность системы, делая её применимой в таких областях, как мониторинг
воздушного пространства, безопасности и автономные системы наблюдения.
16
17.
Спасибо за внимание!17