 Механика
МеханикаПохожие презентации:










Lection1. Main tasks of engineering mechanics. Design scheme of structures. Kinematic analysis of structures
1.
Lection1. Main tasks of engineering mechanics. Design scheme ofstructures. Kinematic analysis of structures. Geometrically variable
and immutable systems. Degree of freedom of the system. Signs of
formation of geometrically unchangeable systems. Instantly
changeable systems. Condition for static definability of geometrically
immutable systems.
Engineering mechanics is the science of methods for
calculating structures for strength, rigidity, and stability.
The main task of mechanical engineering is to
develop methods for calculating and obtaining data for
reliable and economical design of buildings and
structures. Reliability refers to the safety of loadbearing structures, i.e. the practical exclusion of the
possibility of their destruction.
2.
Design scheme of structuresA design diagram of a structure is a simplified
representation of a real system that takes into
account only the basic properties that determine
the behavior of the structure under load. When
drawing up the design scheme, it is necessary to
analyze the structure and identify the main loadbearing elements that will be included in the design
scheme and secondary elements that can be
discarded as "non-working" under load when
studying the strength and rigidity of the system.
3.
External influences, internal effortsExternal influences include external active forces acting on
the structure, as well as soil precipitation, temperature
expansion of individual parts of the structure, material
shrinkage, etc.
Internal forces –forces of interaction between individual
particles of the body that appear as a result of external
influences, they characterize internal resistance. This
resistance is the main function of load-bearing structures,
which must form a solid, stationary system that can
withstand all the influences acting on the structure.
4.
Types of structures1.
Structures made up of rods, called rod
structures.
2.
Structures made up of plates are called
folded (prismatic) systems. Plates include bodies
that have one dimension (thickness) less than the
other two dimensions.
3.
Structures made up of bodies that are
approximately equally extended in 3 directions are
called massive systems.
5.
Kinematic analysisOnly a geometrically immutable system can be
used as a calculation scheme. Consider 3 types of
systems:
1.
geometrically immutable and immobile
systems have only the necessary number of
kinematic connections to ensure immutability and
immobility
2.
geometrically immutable and immobile
systems have a certain number of extra
connections in addition to the necessary
connections
3.
geometrically variable values
6.
A geometrically unchangeable system is a systemin which the change in shape is caused only by the
deformation of the material, i.e., being made of an
absolutely rigid material, it could not change its
shape.
A geometrically variable system is a system in
which displacements occur without deformations,
i.e., shape changes occur in the absence of
deformations in its elements.
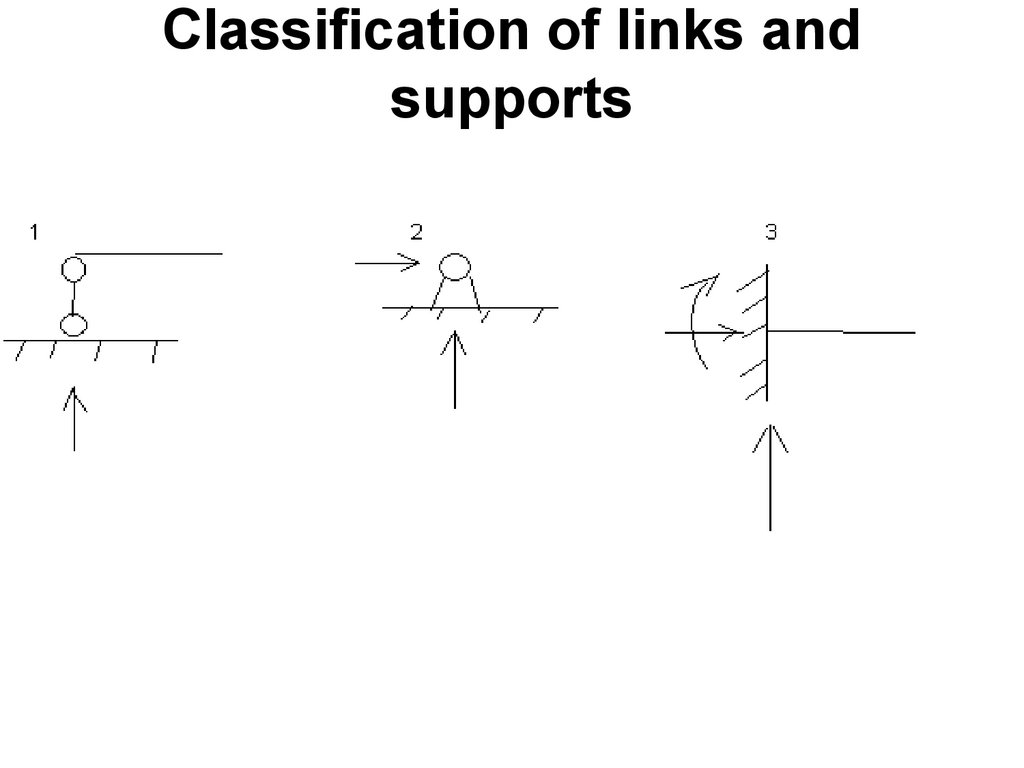
7.
Classification of links andsupports
8.
Degree of freedomThe degree of freedom or degree of variability of a body or system of bodies
is the number of independent geometric parameters that determine the
position of all points of the body or system.
W = 3D -2SH-S0
where D - the number of disks included in the system (the disk is a
geometrically unchangeable element of the system, a separate rod can be
considered as a disk); W - the number of simple hinges; C0 – the number of
support rods.
If W>0, then the system is geometrically variable and, by definition,
cannot be accepted as a design scheme for a structure
If W=0, the system formally contains a sufficient number to be considered
geometrically immutable and statically definable
If W<0, then the system has an excessive number of connections for
equilibrium. The system is statically indeterminate
9.
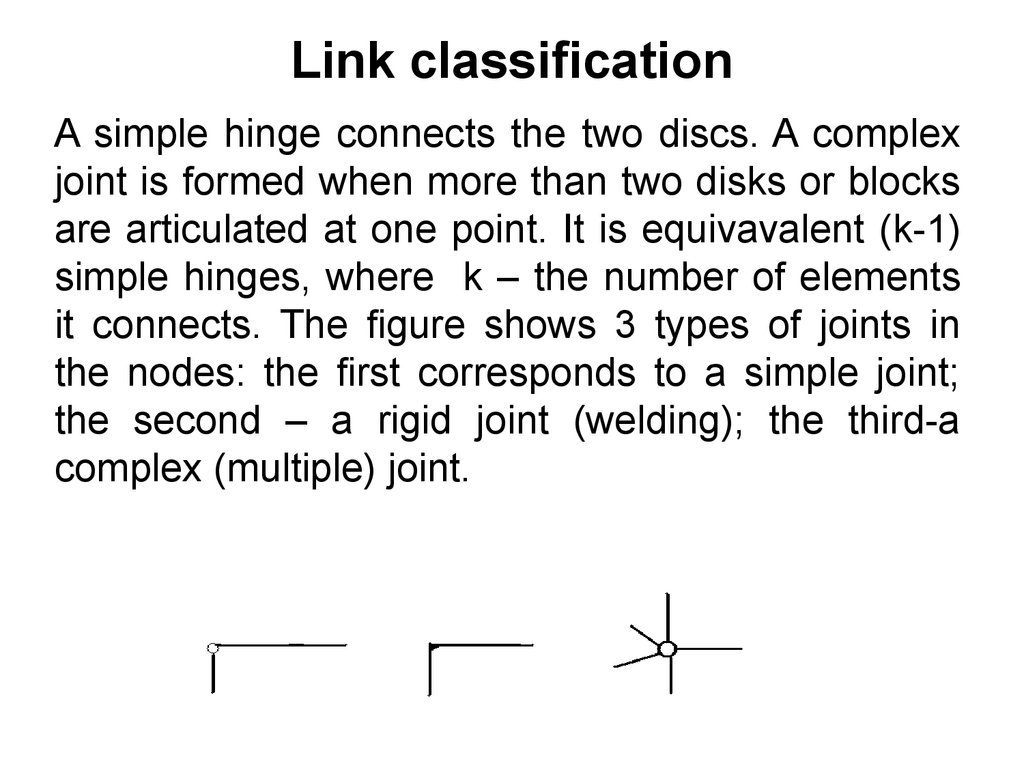
Link classificationA simple hinge connects the two discs. A complex
joint is formed when more than two disks or blocks
are articulated at one point. It is equivavalent (k-1)
simple hinges, where k – the number of elements
it connects. The figure shows 3 types of joints in
the nodes: the first corresponds to a simple joint;
the second – a rigid joint (welding); the third-a
complex (multiple) joint.
10.
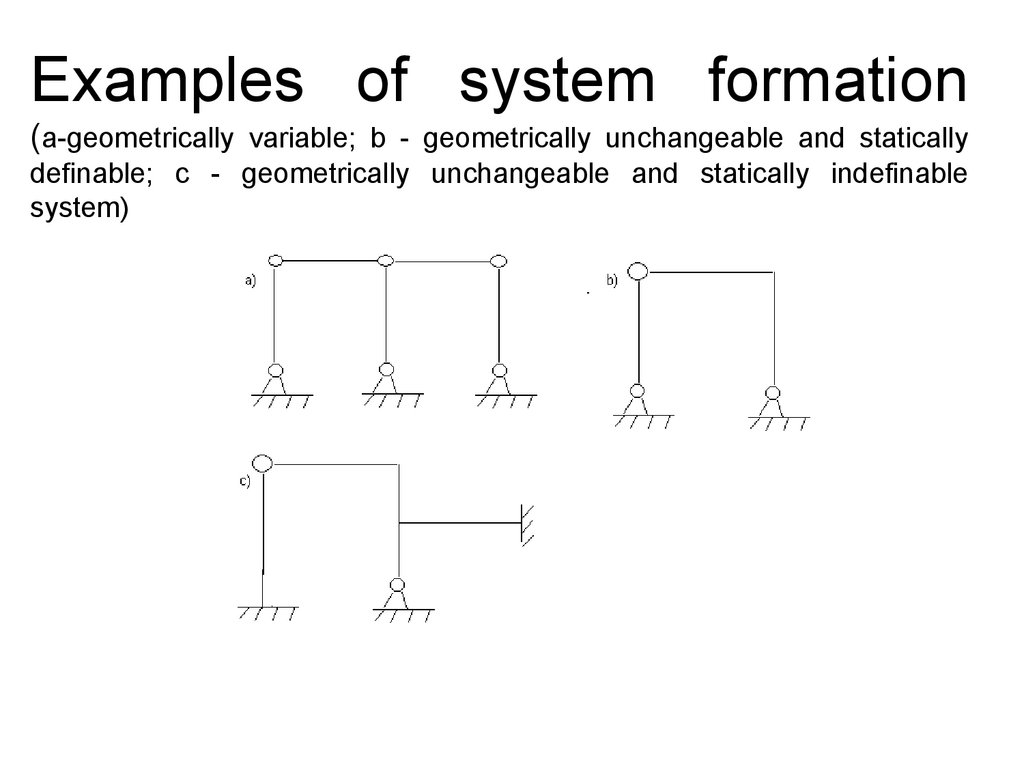
Examples of system formation(a-geometrically variable; b - geometrically unchangeable and statically
definable; c - geometrically unchangeable and statically indefinable
system)
11.
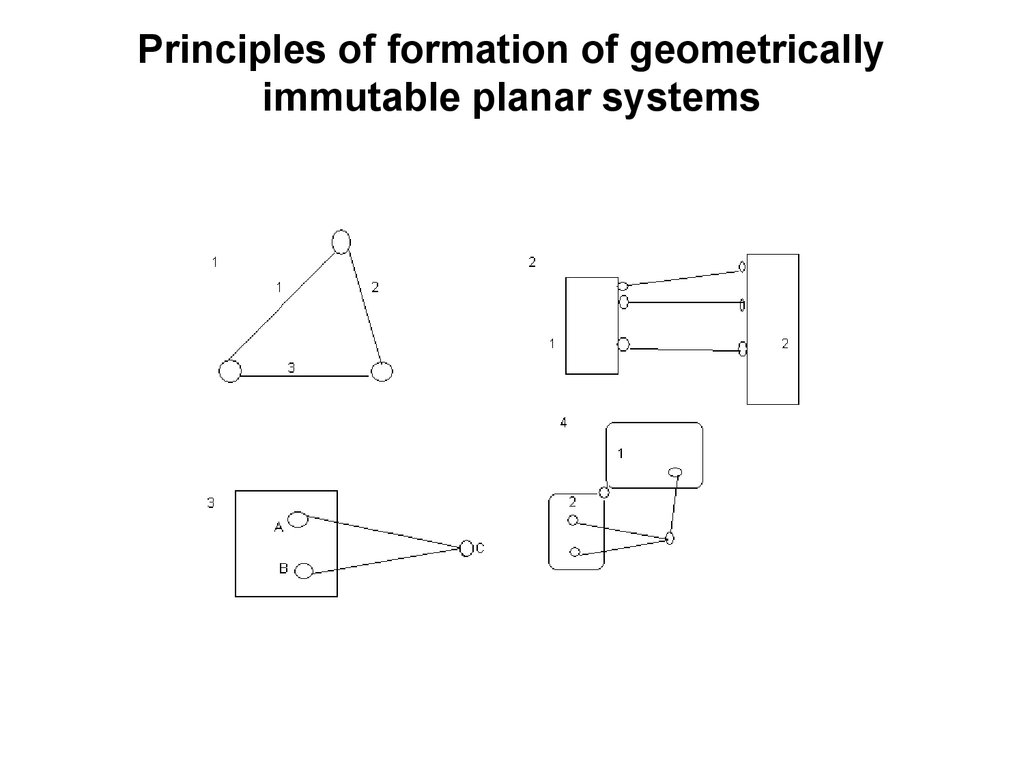
Principles of formation of geometricallyimmutable planar systems
12.
Let us consider the simplest cases of formation ofgeometrically immutable systems:
1.
A third disk is attached to two disks connected by a
common hinge by means of two hinges, and the three hinges do
not lie on the same straight line.
2.
Two disks form a geometrically unchangeable system if
they are connected by three rods whose axes do not intersect at
a single point and are not parallel to each other.
3.
A new node is pivotally attached to the disk by means of
two rods, and the three hinges do not lie on the same straight
line.
4.
To two disks that are pivotally connected to each other, a
new node is pivotally added using three rods, and the three
hinges do not belong to the same disk.