



 называется кинематическая цепь, образованная только подвижными")
























 Механика
МеханикаПохожие презентации:










Теория механизмов и машин. Тема 4
1. Теория механизмов и машин
ТММТеория механизмов и машин
19.10.2025
лекция 3
1
2. Тема 4
• Структурные группы звеньев. Структурныйсинтез
понятия структурной группы, её класса и
порядка, избыточных связей, лишних
степеней свободы, принцип синтеза
плоских стержневых механизмов по
Ассуру-Артоболевскому.
3. Структурный анализ механизмов
W = 6n - 5 P1 - 4 P2 - 3 P3 - 2 P4 - 1 P519.10.2025
лекция 2
3
4. Для решения задач синтеза и анализа сложных механизмов профессором Петербургского университета Л.В. Ассуром была предложена
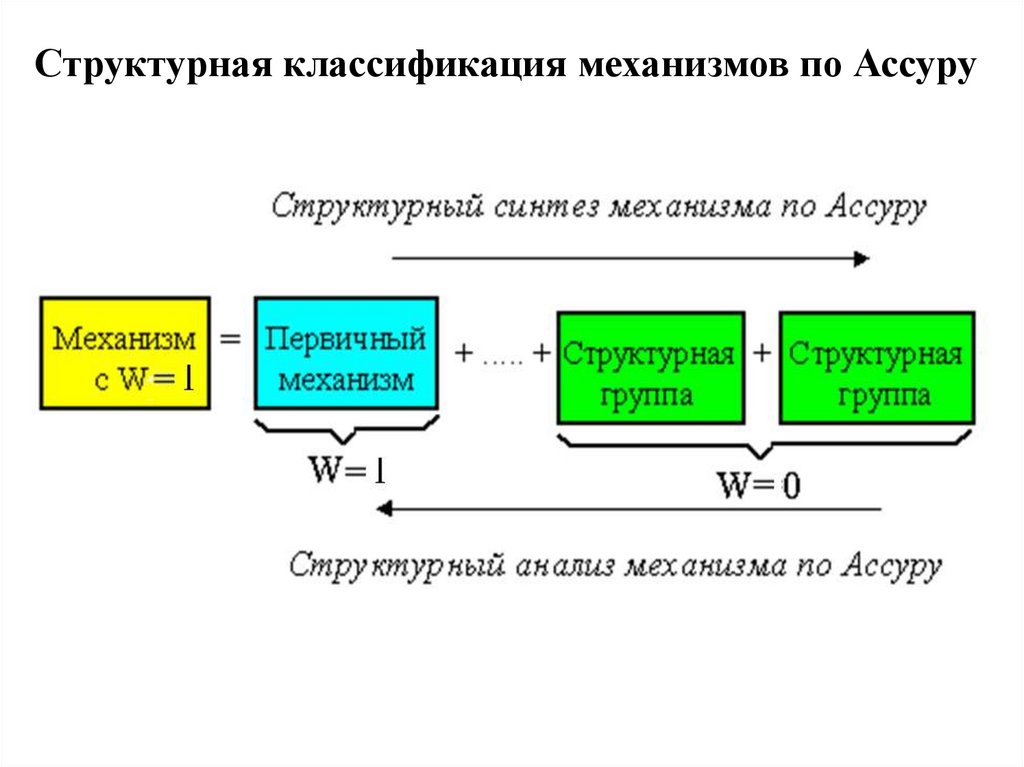
Структурная классификация механизмов по АссуруДля решения задач синтеза и
анализа сложных механизмов
профессором Петербургского
университета
Л.В. Ассуром была предложена
оригинальная структурная
классификация.
По этой классификации механизмы состоят из
первичных механизмов и структурных групп Ассура.
19.10.2025
лекция 3
4
5.
Структурная классификация механизмов по Ассуру6.
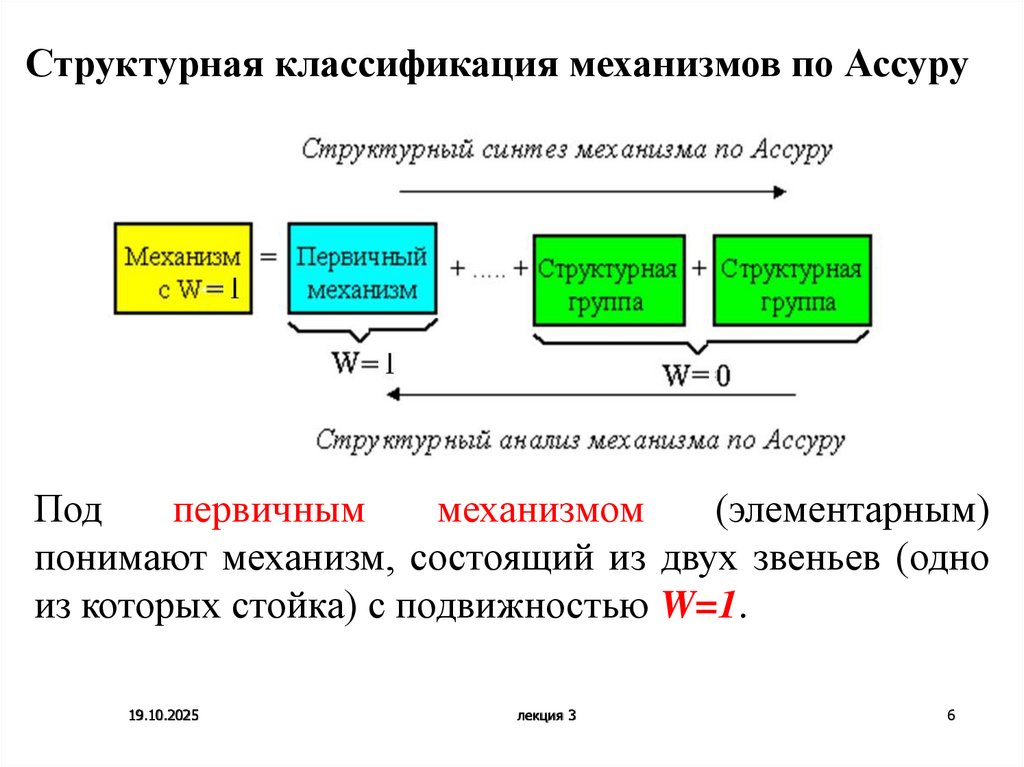
Структурная классификация механизмов по АссуруПод
первичным
механизмом
(элементарным)
понимают механизм, состоящий из двух звеньев (одно
из которых стойка) с подвижностью W=1.
19.10.2025
лекция 3
6
7.
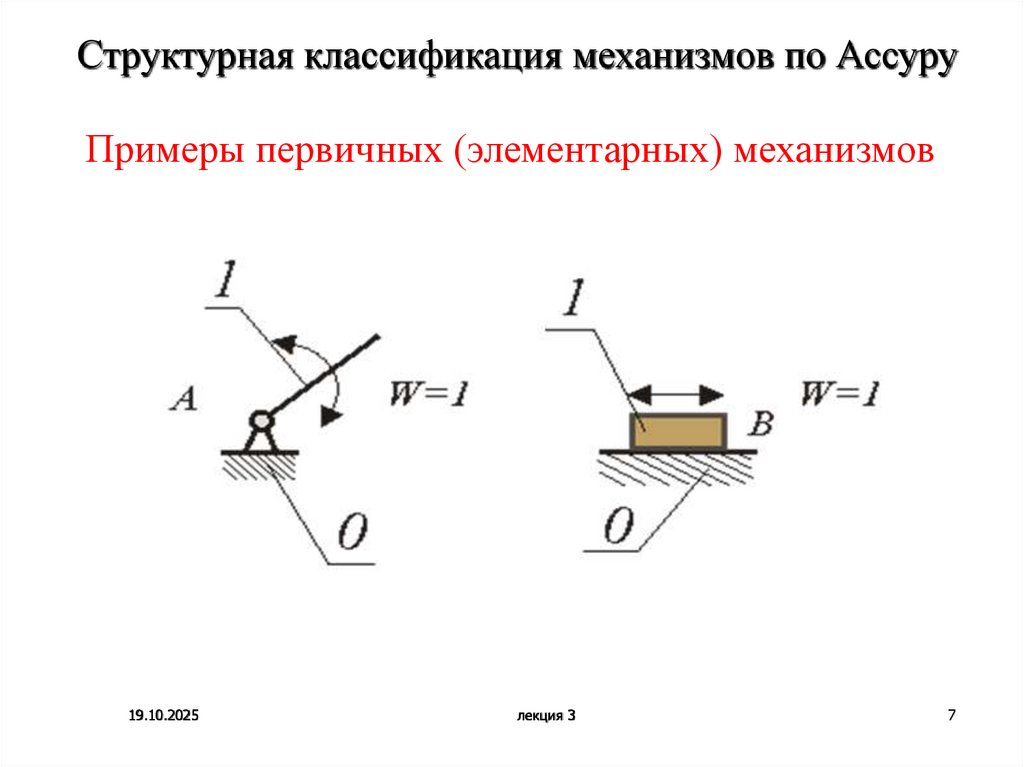
Структурная классификация механизмов по АссуруПримеры первичных (элементарных) механизмов
19.10.2025
лекция 3
7
8. Структурной группой Ассура (или группой нулевой подвижности) называется кинематическая цепь, образованная только подвижными
Структурная классификация механизмов по АссуруСтруктурной группой Ассура (или группой нулевой
подвижности) называется кинематическая цепь,
образованная только подвижными звеньями
механизма, подвижность которой (на плоскости и в
пространстве)
равна
нулю
(Wгр=0).
Конечные звенья групп Ассура, входящие в две
кинематические пары, из которых одна имеет
свободный элемент звена, называются поводками.
Группы могут быть различной степени сложности.
19.10.2025
лекция 3
8
9. Структурная классификация механизмов по Ассуру
19.10.2025лекция 3
9
10. Структурная классификация механизмов по Ассуру
19.10.2025лекция 3
10
11. Структурная классификация механизмов по Ассуру
19.10.2025лекция 3
11
12. Структурная классификация механизмов по Ассуру
19.10.2025лекция 3
12
13. Структурная классификация механизмов по Ассуру
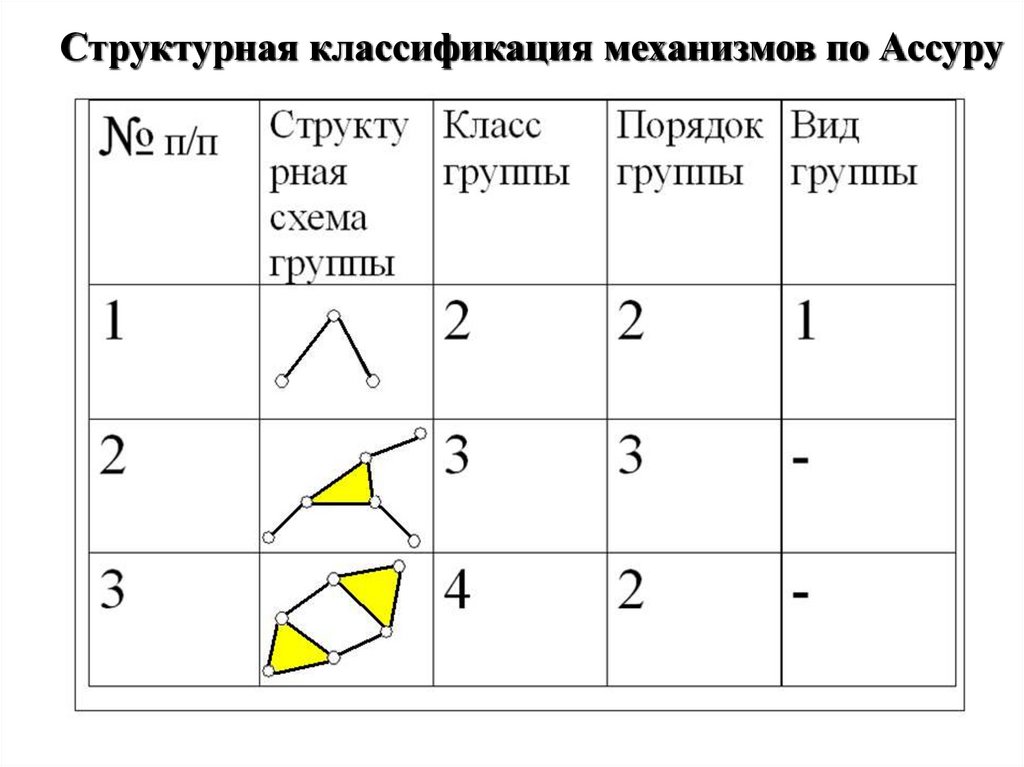
Структурные группы Ассура делятся на классы взависимости от числа замкнутых контуров внутри
группы.
Класс структурной группы определяется числом
кинематических пар , которые образуют самый
сложный замкнутый контур структурной группы.
Порядок структурной группы определяется числом
звеньев, которыми она присоединяется к механизму.
Примеры:
19.10.2025
лекция 3
13
14.
Структурная классификация механизмов по Ассуру19.10.2025
лекция 3
14
15. Структурная классификация механизмов по Ассуру
Замечание №1. В структурные схемы и структурныеформулы механизмов размеры не входят.
Замечание №2. При конструировании механизмов Wчисло степеней свободы - задано и требуется
проверить фактическую подвижность.
Если подвижность механизма равна нулю или
отрицательна, значит, сборка механизма без
напряжения и деформации звеньев не возможна.
19.10.2025
лекция 3
15
16.
?19.10.2025
лекция 3
16
17. Тема 5
• Основные понятия кинематики механизмов• Кинематическое исследование механизмов
(методом планов)
понятия: кинематический анализ,
кинематический синтез, задачи и методы
кинематического анализа и синтеза.
понятия планов положений, скоростей,
ускорений, масштабных коэффициентов,
свойства планов скоростей и ускорений.
18. Кинематический анализ механизмов
Целью кинематического анализа являетсяопределение: координат, скоростей и ускорений
всех точек механизма.
Выделяют два основных метода:
- Аналитический
- Графический
19.10.2025
лекция 3
18
19. Кинематический анализ механизмов
Существует большое количество аналитическихметодов исследования кинематики машин и
механизмов.
Сущность всех этих методов заключается в том,
что линейные и угловые координаты, скорости и
ускорения точек звеньев механизма
определяются в виде аналитических выражений.
Аналитические выражения могут определять
функцию явно, неявно или параметрически.
19.10.2025
лекция 3
19
20. Кинематический анализ механизмов
Аналитический методДостоинства:
- Высокая точность
- Использование ЭВМ позволяет
проводить
подробный анализ механизма
Недостатки:
- Бывает излишне громоздким
19.10.2025
лекция 3
20
21. Кинематический анализ механизмов
Графический методДостоинства :
- Простота
- Наглядность
Недостатки :
- Недостаточная точность
19.10.2025
лекция 3
21
22. Кинематический анализ механизмов
Аналитический методМетод Зиновьева или метод замкнутых векторных
контуров
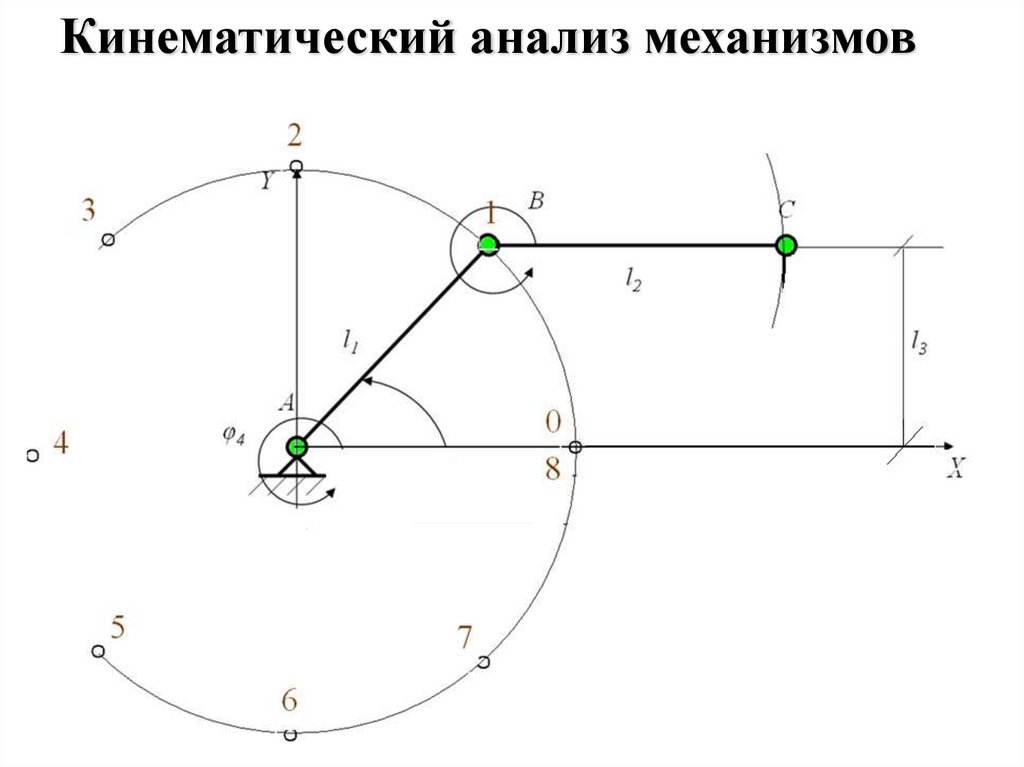
1. Рисуем структурную схему механизма:
19.10.2025
лекция 3
22
23. Кинематический анализ механизмов
2. Проводим структурный анализ механизма иубеждаемся, что это механизм:
W=3n-2P1-P2=1
W=3*3-2*4-1*0=1
n=3; P1=4; P2=0
Число двухподвижных
кинематических пар
Число подвижных звеньев
19.10.2025
Число одноподвижных
кинематических пар
лекция 3
23
24. Кинематический анализ механизмов
3. Выполняем кинематическую схему механизма в масштабе:Дано: l1, l2, l3, φ1, φ3=90°, φ4=360°
Найти: l4, l4’(скорость), l4’’(ускорение), φ2, φ2’, φ2’’
19.10.2025
лекция 3
24
25. Кинематический анализ механизмов
4. Выделяем ведущее звено:В нашем случае это звено №1
5. Выбираем систему координат:
Начало координат размещаем в стойке начального звена
6. Все звенья механизма заменяем векторами произвольного
направления:
Каждый вектор будет характеризовать его длина и угол.
19.10.2025
лекция 3
25
26. Кинематический анализ механизмов
6. Все звенья механизма заменяем векторами произвольногонаправления:
Каждый вектор будет характеризовать его длина и угол ( - углы
отсчитываются против часовой стрелки).
7. Все векторы объединяются между собой в замкнутые векторные
контуры, так чтобы в контур входило не более 2 неизвестных
19.10.2025
лекция 3
26
27. Кинематический анализ механизмов
19.10.2025лекция 3
27
28. Кинематический анализ механизмов
8. Составим векторные уравнения замкнутости контура:19.10.2025
лекция 3
28
29. Кинематический анализ механизмов
9. Составим уравнения проекций на оси координат:19.10.2025
лекция 3
29
30. Кинематический анализ механизмов
10. Дифференцируем систему по времени и получаем решениядля скоростей:
19.10.2025
лекция 3
30
31. Кинематический анализ механизмов
11. Ещё раз дифференцируем систему по времени и получаемрешения для ускорений:
19.10.2025
лекция 3
31
32.
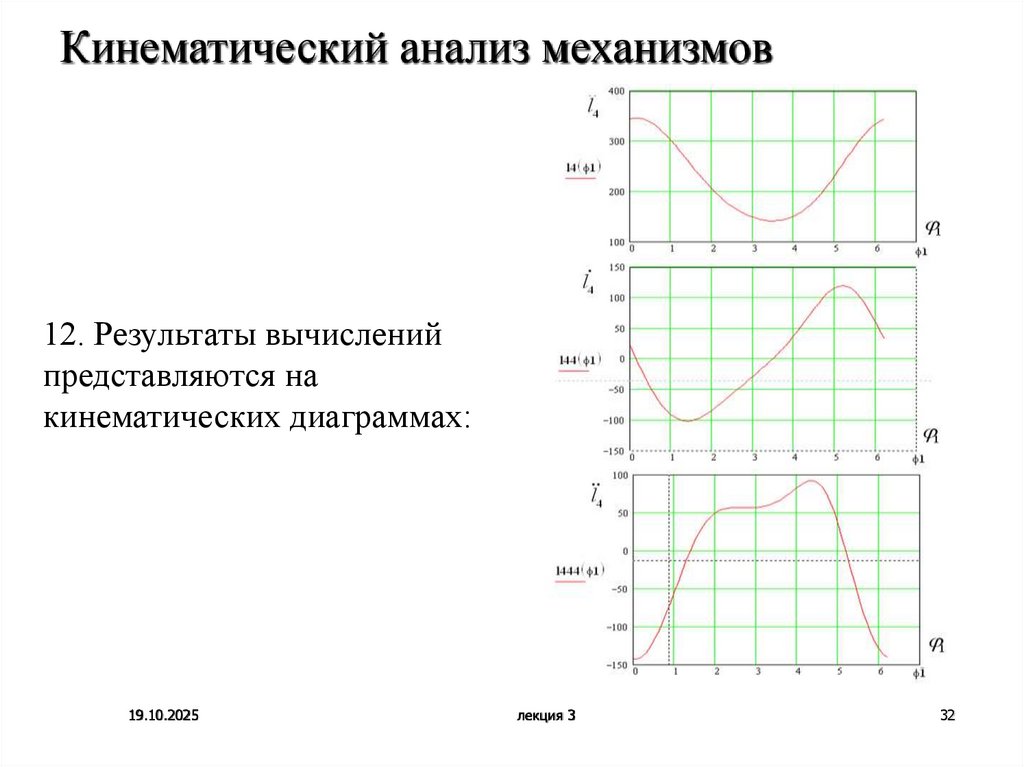
Кинематический анализ механизмов12. Результаты вычислений
представляются на
кинематических диаграммах:
19.10.2025
лекция 3
32
33.
?19.10.2025
лекция 3
33
34. Кинематический анализ механизмов
Графический метод (метод планов положений)1. Вводится вычислительный масштаб:
2. Находим длины всех звеньев на чертеже из соотношений:
35. Кинематический анализ механизмов
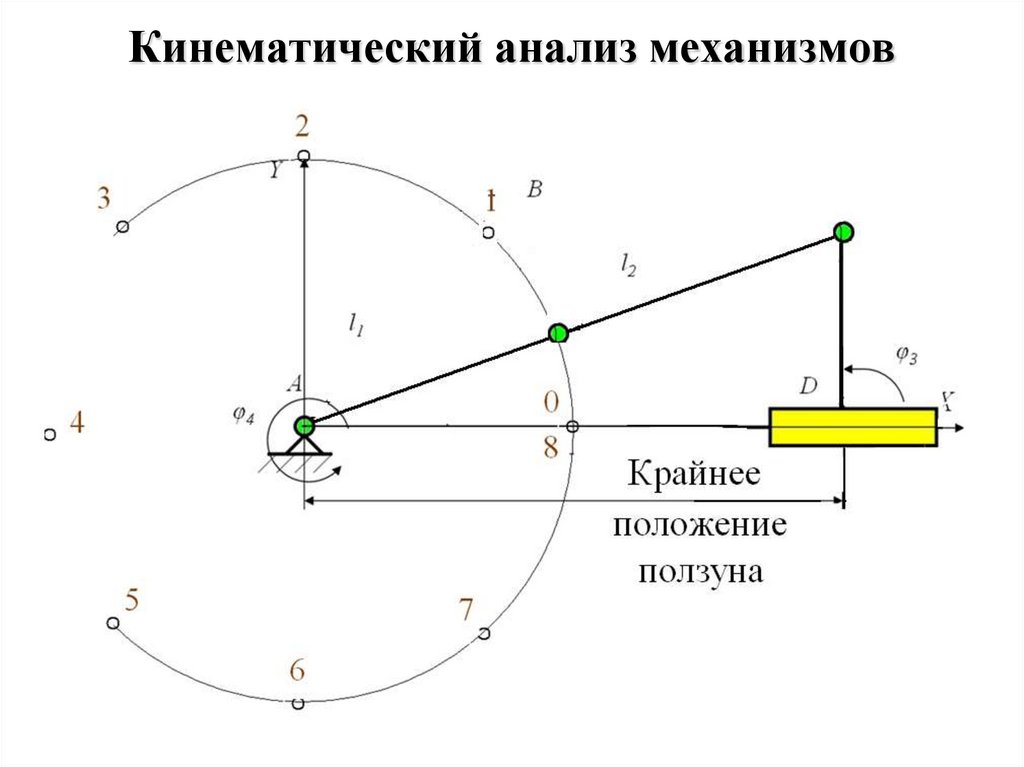
3. Циркулем проводим окружность по которой движется точкаВ (на чертеже r=АВ) и делим её на 8 частей; И строим так для
каждого положения кривошипа и строим диаграмму:
36.
Кинематический анализ механизмов37. Кинематический анализ механизмов
19.10.2025лекция 3
37
38.
Кинематический анализ механизмов39.
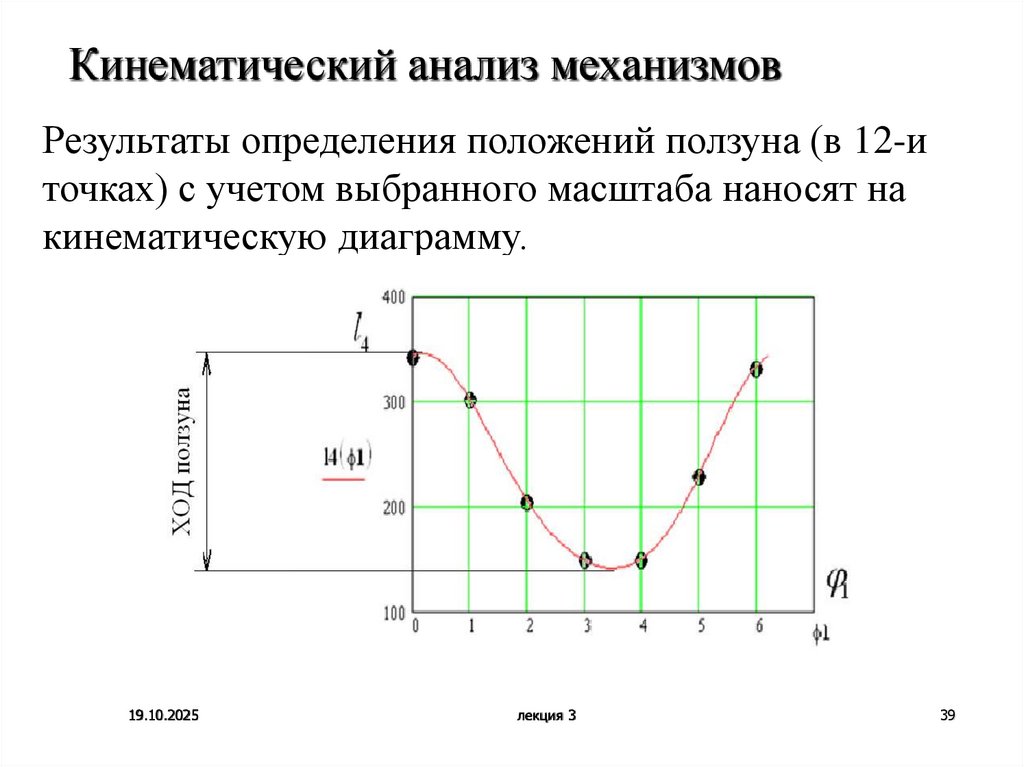
Кинематический анализ механизмовРезультаты определения положений ползуна (в 12-и
точках) с учетом выбранного масштаба наносят на
кинематическую диаграмму.
19.10.2025
лекция 3
39
40.
?19.10.2025
лекция 3
40