






















 Механика
МеханикаПохожие презентации:



")






Теория механизмов и машин. Лекция 4
1. Теория механизмов и машин
ТММТеория механизмов и машин
06.04.2022
лекция 4
1
2. Тема 5
• Основные понятия кинематики механизмовпонятия: кинематический анализ, задачи и
методы кинематического анализа и синтеза.
Кинематическое исследование механизмов
(методом планов) планов положений,
скоростей, ускорений, масштабных
коэффициентов, свойства планов скоростей
и ускорений
3. Кинематический анализ механизмов
Графический метод планов скоростейИспользуется для нахождения скоростей
точек и звеньев механизма, для определения
кинетической энергии и для определения
ускорений
06.04.2022
лекция 4
3
4. Алгоритм построения плана скоростей
• Предполагается, что у нас есть структурнаясхема, выполнен структурный анализ и для
выбранного положения мы строим планы
скоростей.
• Задано произвольное положение механизма
и для него нужно построить план
скоростей.
06.04.2022
лекция 4
4
5.
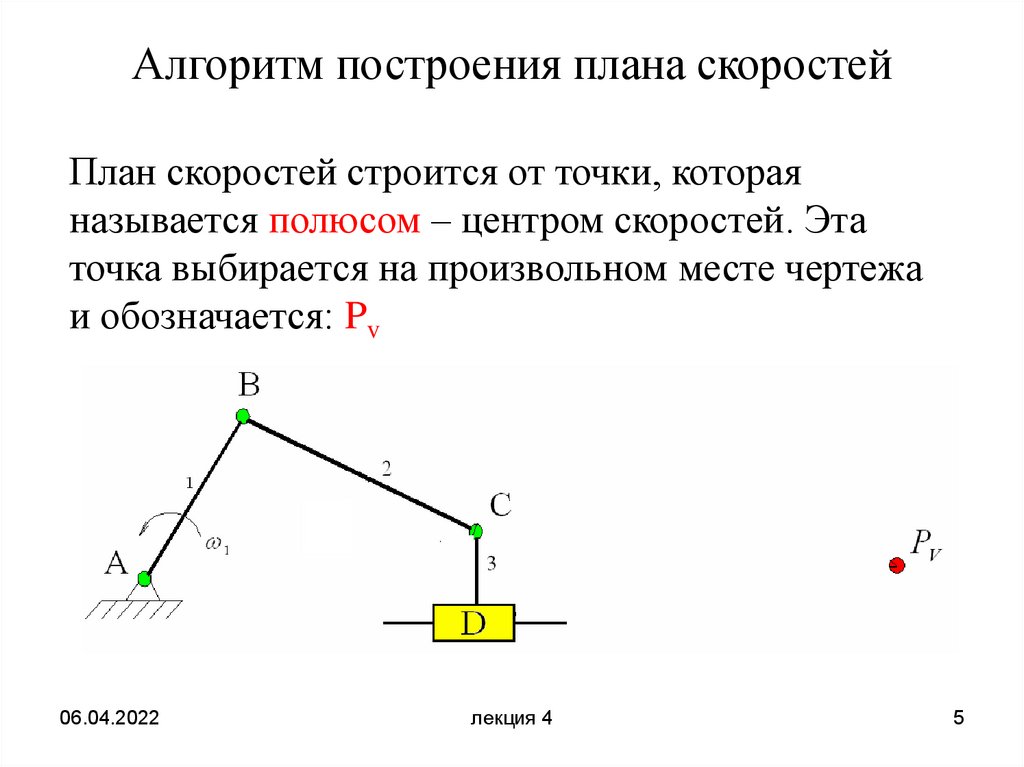
Алгоритм построения плана скоростейПлан скоростей строится от точки, которая
называется полюсом – центром скоростей. Эта
точка выбирается на произвольном месте чертежа
и обозначается: Pv
06.04.2022
лекция 4
5
6. Алгоритм построения плана скоростей
Если задана угловая скорость первого звена ω1, тоскорость точки В определяется:
– вектор направлен перпендикулярно АВ.
06.04.2022
лекция 4
6
7. Алгоритм построения плана скоростей
Из полюса РV проводим линию, перпендикулярную кАВ, которая изображает скорость в точке В.
Введём масштабный коэффициент скоростей μV:
06.04.2022
лекция 4
7
8. Алгоритм построения плана скоростей
Определим скорость в точке С. Для этого запишемвекторное уравнение:
Проанализируем это уравнение.
известно полностью,
– известно направление,
модуль
скорости
неизвестен так как ω2
неизвестна.
06.04.2022
лекция 4
8
9. Алгоритм построения плана скоростей
Из полюса PV проводим линию || OX вдолькоторой движется ползун и направлена скорость
точек ползуна С и D, а из точки b – линию, ┴ ВС,
получаем точку с на плане скоростей.
06.04.2022
лекция 4
9
10.
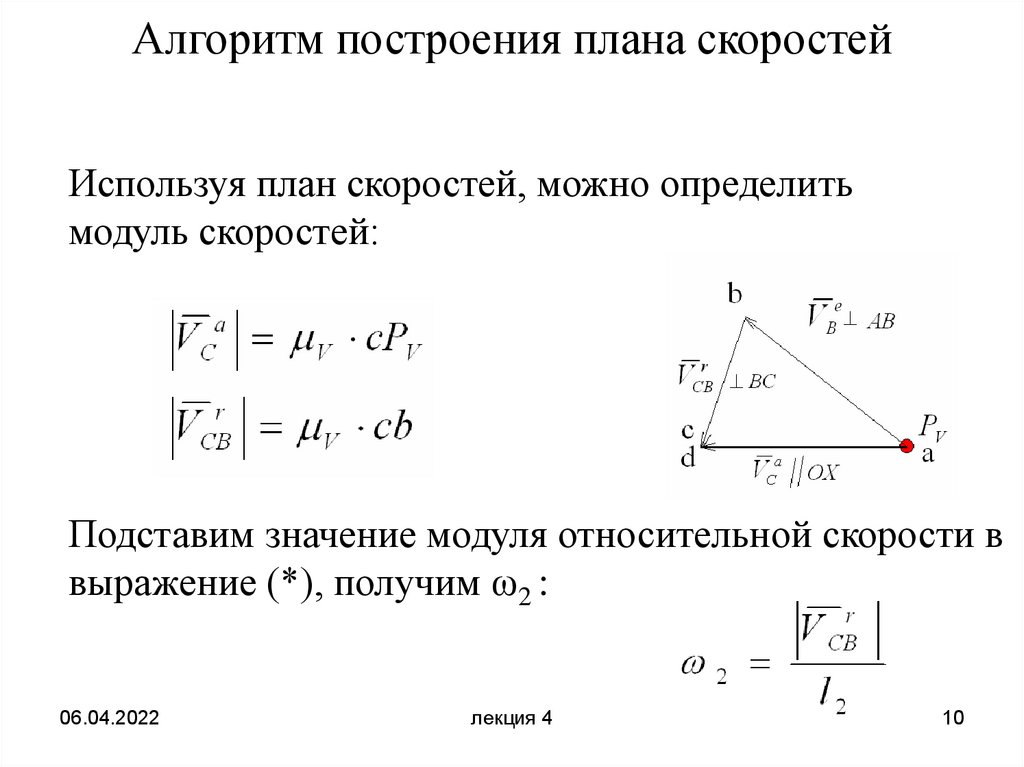
Алгоритм построения плана скоростейИспользуя план скоростей, можно определить
модуль скоростей:
Подставим значение модуля относительной скорости в
выражение (*), получим ω2 :
06.04.2022
лекция 4
10
11. Алгоритм построения плана скоростей
Усложним задачу, определив скорость точки F.06.04.2022
лекция 4
11
12. Алгоритм построения плана скоростей
06.04.2022лекция 4
12
13.
Свойства плана скоростей:1. Векторы, выходящие из полюса PV (см. план скоростей),
представляют собой абсолютные скорости точек.
2. Векторы, соединяющие между собой концы векторов
абсолютных скоростей, изображают относительные
скорости.
3. Все точки, скорость которых равна нулю, находятся в
полюсе.
4. Относительные скорости образуют на плане скоростей
фигуру, подобную одноимённой фигуре на звене механизма
и повёрнутую в сторону мгновенного вращения этого звена
на 900.
06.04.2022
лекция 4
13
14.
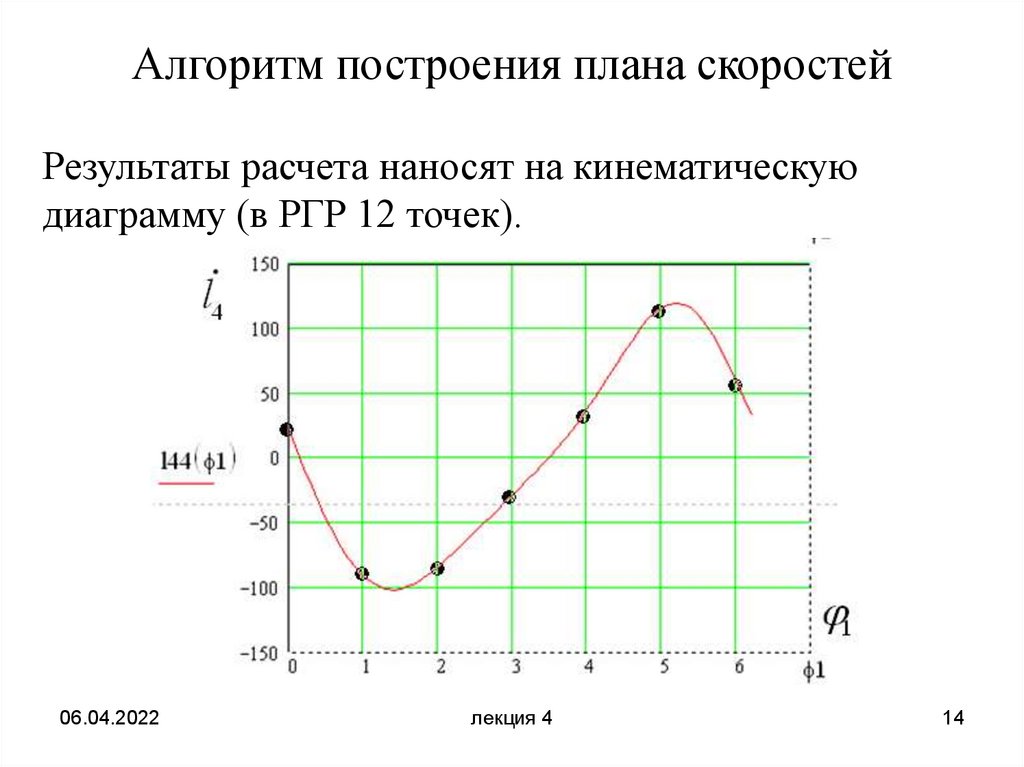
Алгоритм построения плана скоростейРезультаты расчета наносят на кинематическую
диаграмму (в РГР 12 точек).
06.04.2022
лекция 4
14
15.
?06.04.2022
лекция 4
15
16. Кинематический анализ механизмов
Графический метод планов ускорений• Используется для нахождения ускорений
точек и звеньев механизма, для определения
сил и моментов инерции
• План ускорений строится для выбранного
положения механизма после построения
плана скоростей
06.04.2022
лекция 4
16
17.
Полагаем известным направление угловой скоростиω2, направления ω1 и ε1. Запишем векторные
уравнения движения точки В:
06.04.2022
лекция 4
17
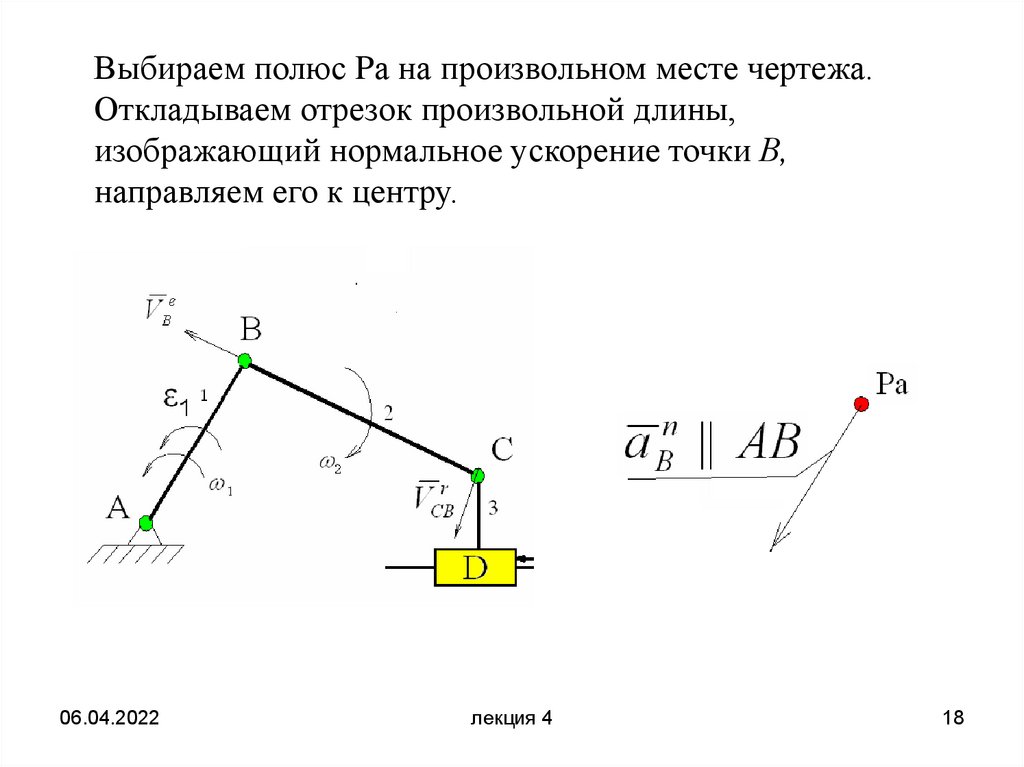
18.
Выбираем полюс Pа на произвольном месте чертежа.Откладываем отрезок произвольной длины,
изображающий нормальное ускорение точки В,
направляем его к центру.
06.04.2022
лекция 4
18
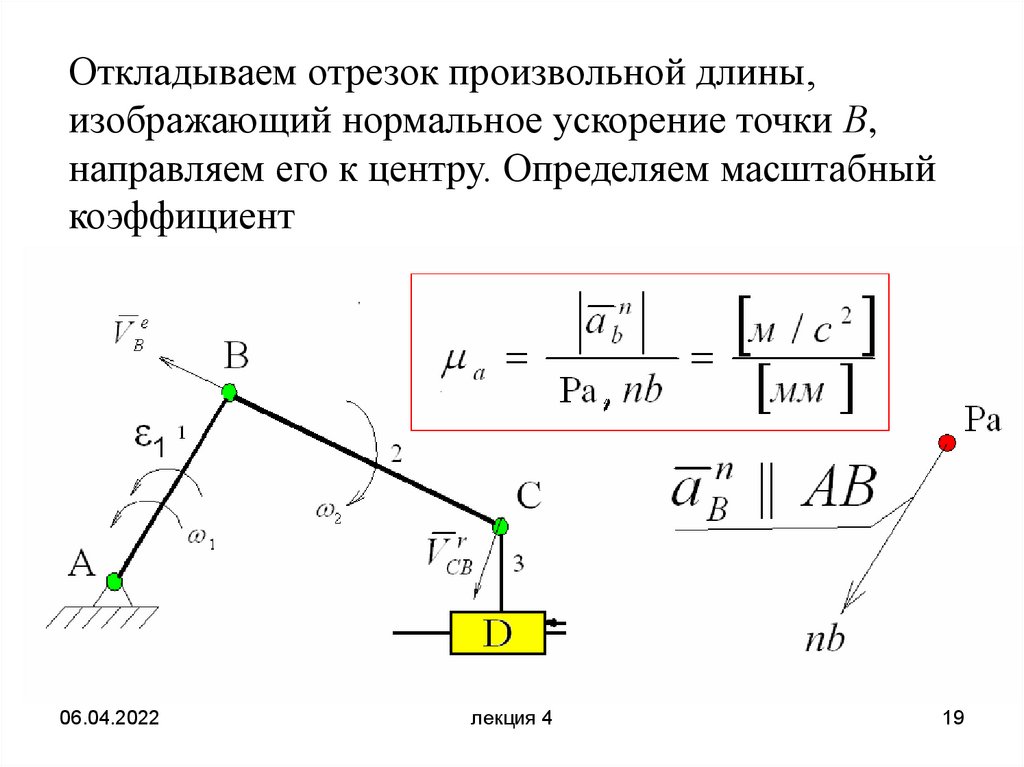
19.
Откладываем отрезок произвольной длины,изображающий нормальное ускорение точки В,
направляем его к центру. Определяем масштабный
коэффициент
06.04.2022
лекция 4
19
20.
Отрезком nb-b на плане ускорений изображаетсякасательное ускорение
– длина отрезка nb-b
06.04.2022
лекция 4
20
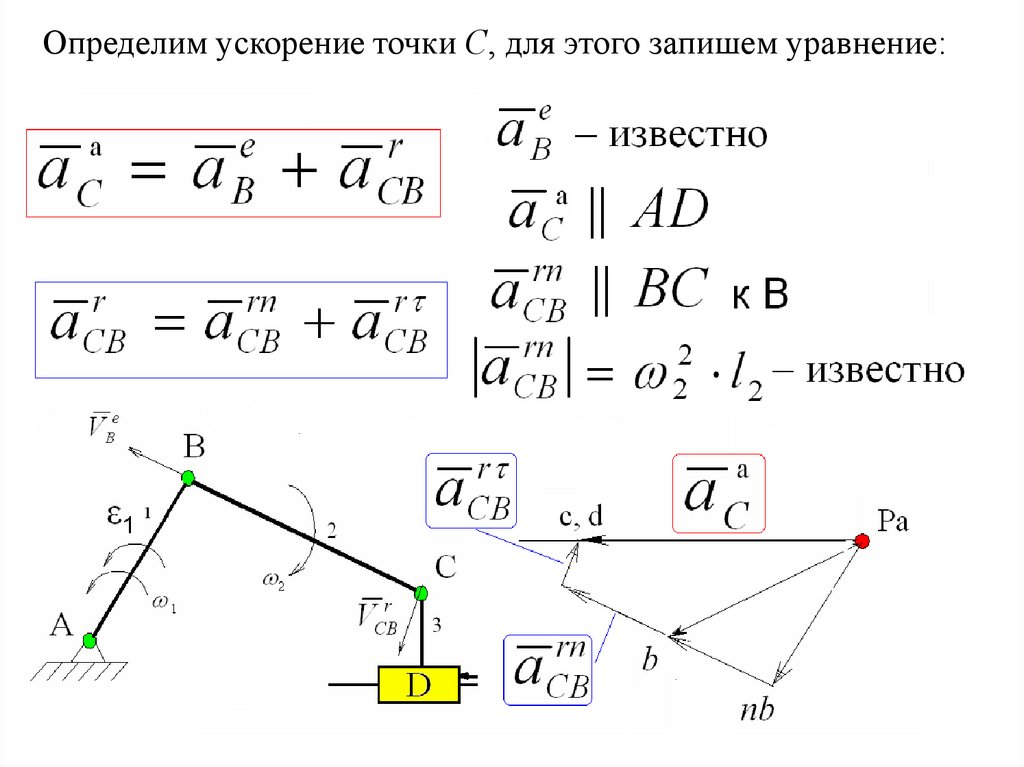
21.
Определим ускорение точки С, для этого запишем уравнение:06.04.2022
лекция 4
21
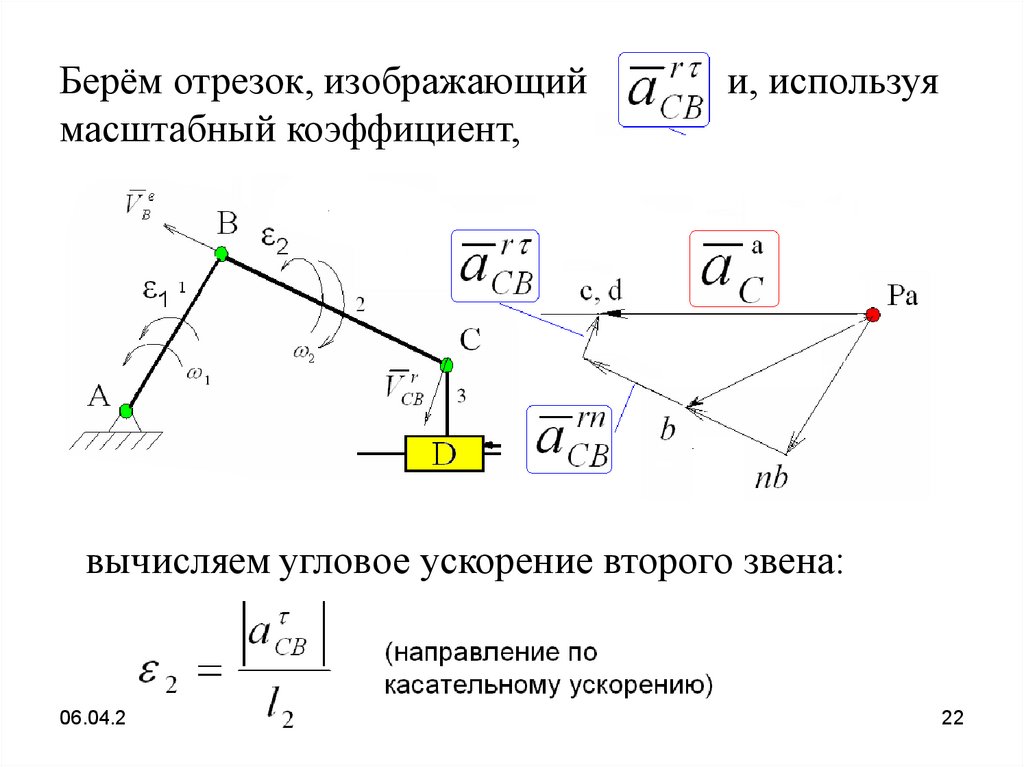
22.
Берём отрезок, изображающиймасштабный коэффициент,
и, используя
вычисляем угловое ускорение второго звена:
06.04.2022
лекция 4
22
23.
Результаты расчета наносят на кинематическуюдиаграмму (в РГР 2 точки).
06.04.2022
лекция 4
23
24.
?06.04.2022
лекция 4
24
25. Кинематика кулисных механизмов
06.04.2022лекция 4
25
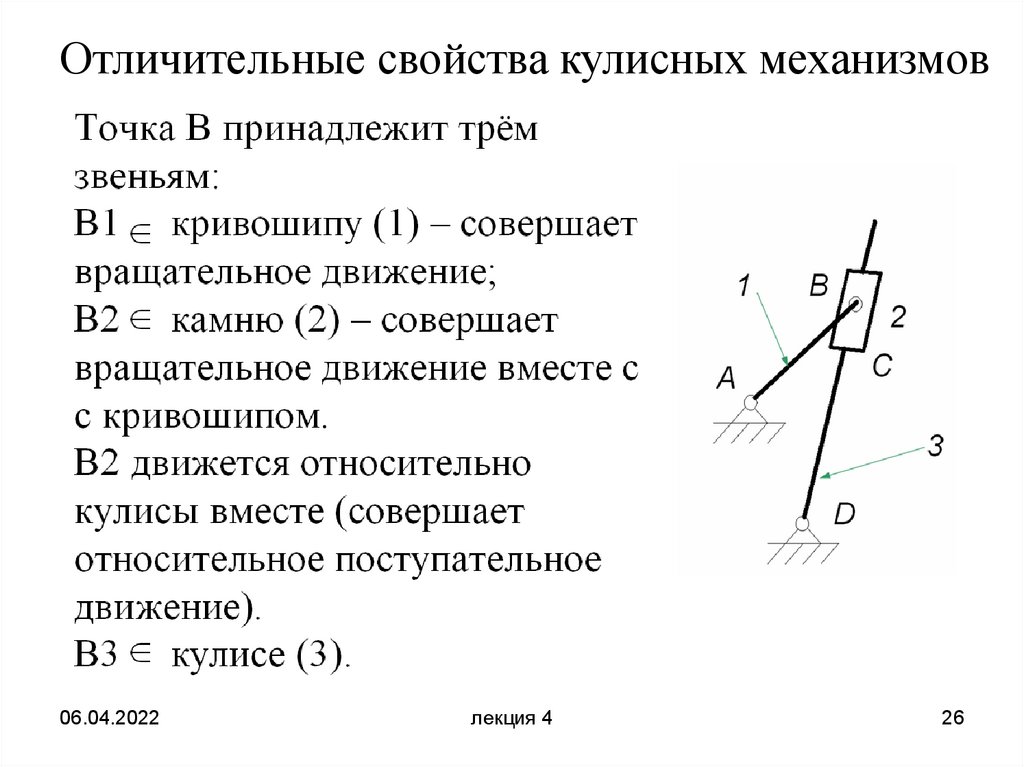
26.
Отличительные свойства кулисных механизмов06.04.2022
лекция 4
26
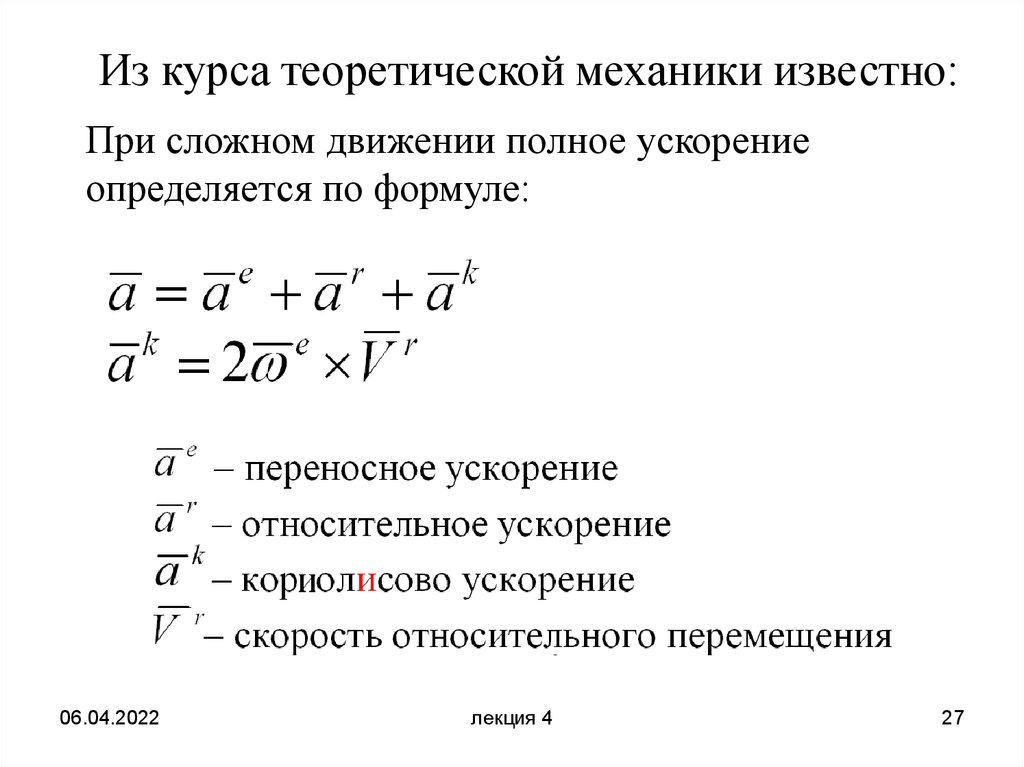
27.
Из курса теоретической механики известно:При сложном движении полное ускорение
определяется по формуле:
06.04.2022
лекция 4
27
28.
Из курса теоретической механики известно:06.04.2022
лекция 4
28
29. Построение планов скоростей кулисных механизмов
06.04.2022лекция 4
29
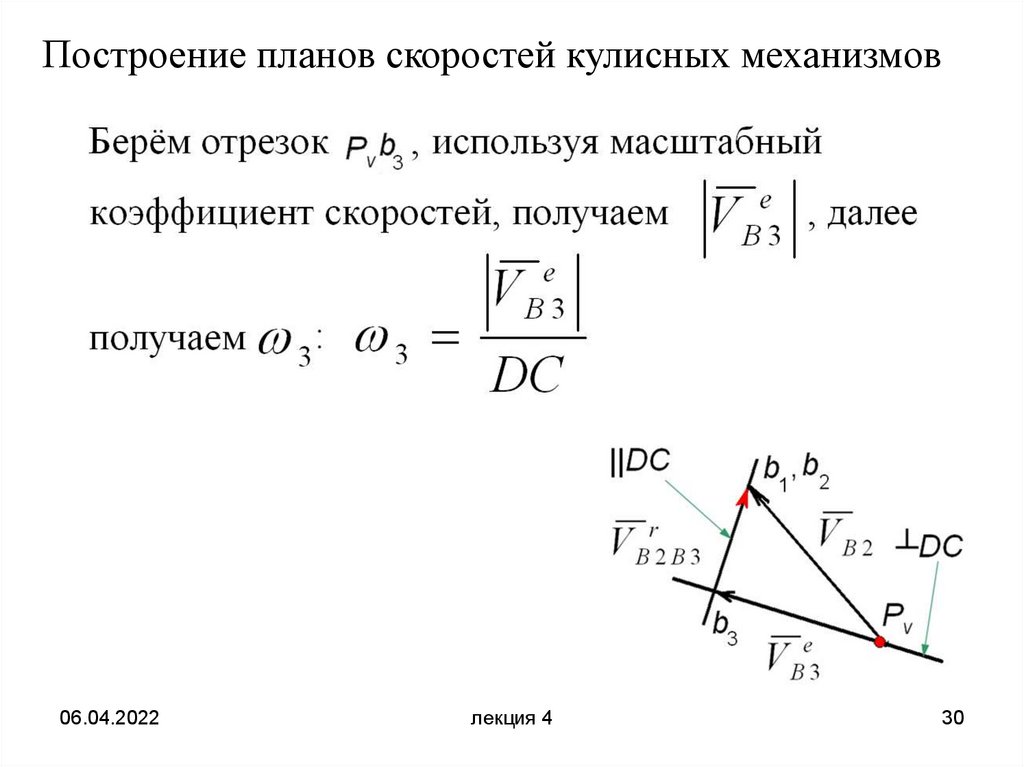
30.
Построение планов скоростей кулисных механизмов06.04.2022
лекция 4
30
31.
?06.04.2022
лекция 4
31
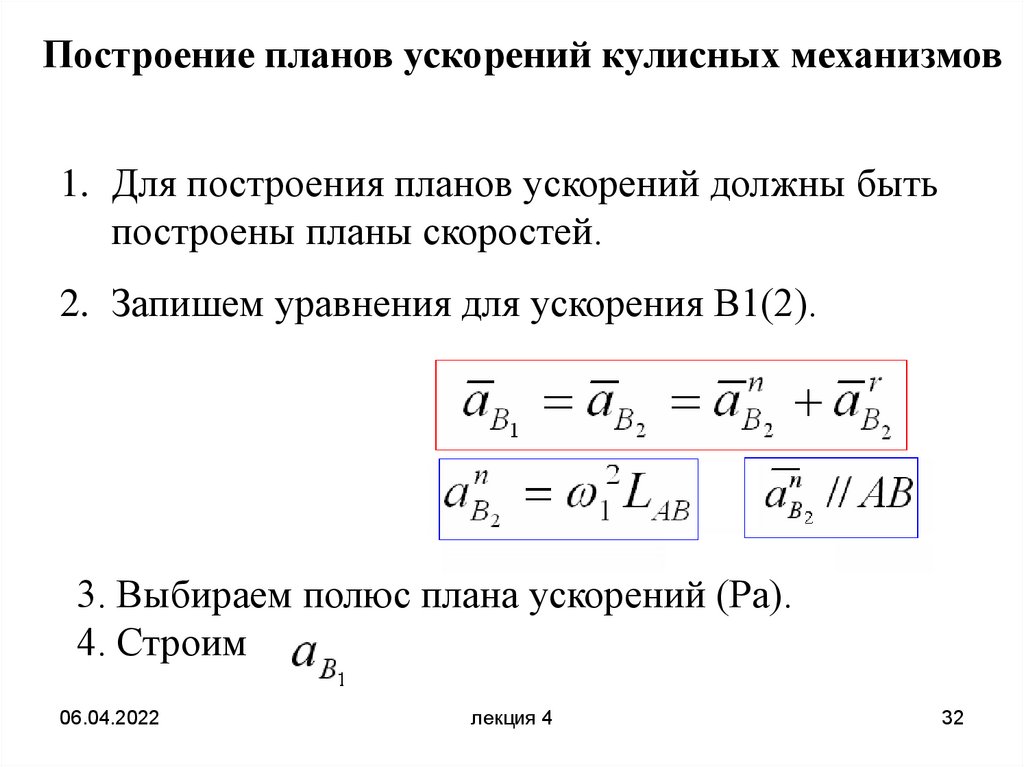
32.
Построение планов ускорений кулисных механизмов1. Для построения планов ускорений должны быть
построены планы скоростей.
2. Запишем уравнения для ускорения В1(2).
3. Выбираем полюс плана ускорений (Ра).
4. Строим
06.04.2022
лекция 4
32
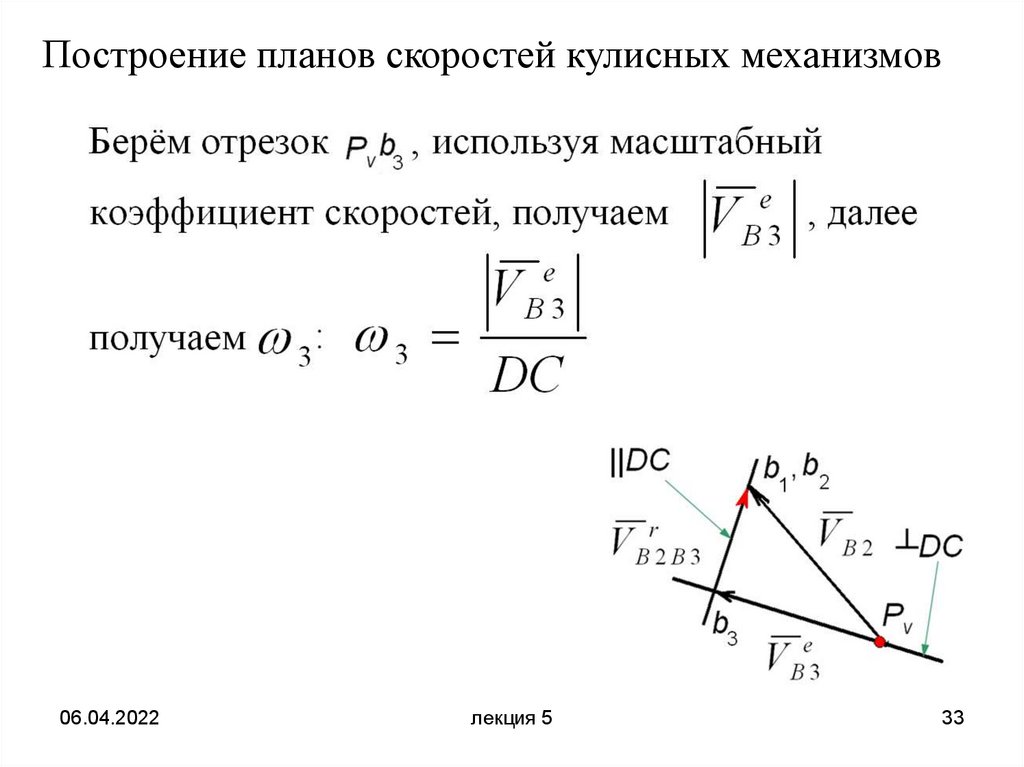
33.
Построение планов скоростей кулисных механизмов06.04.2022
лекция 5
33
34.
Построение планов ускорений кулисных механизмов1. Для построения планов ускорений должны быть
построены планы скоростей.
2. Запишем уравнения для ускорения В1(2).
3. Выбираем полюс плана ускорений (Ра).
4. Строим
06.04.2022
лекция 5
34
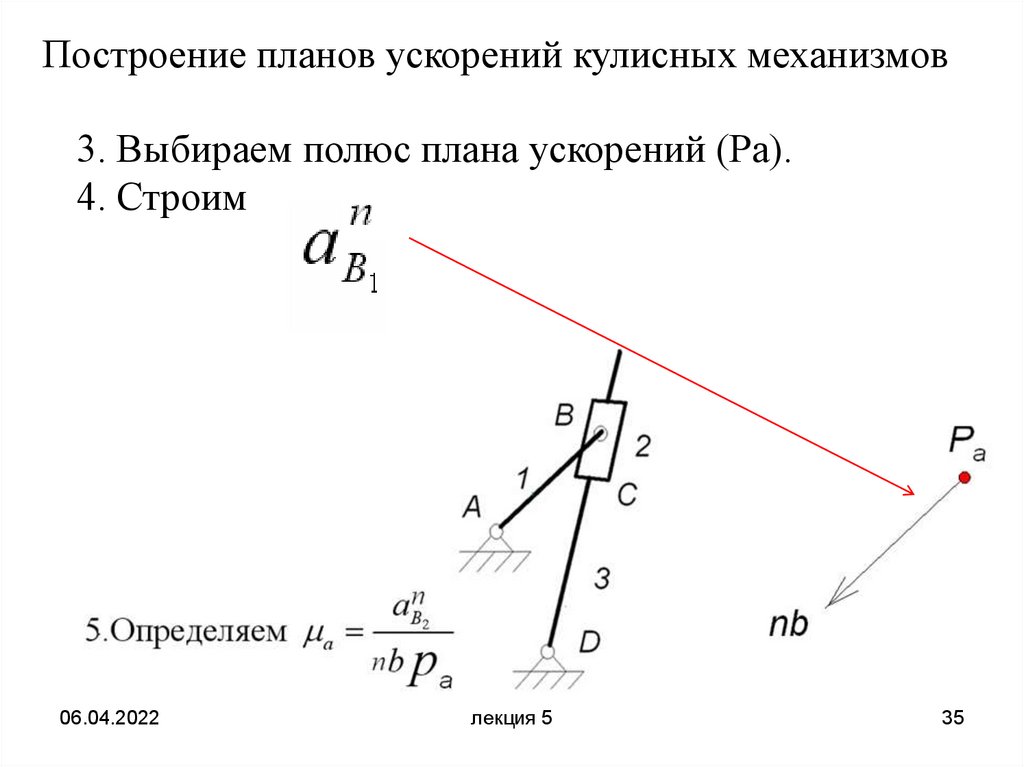
35.
Построение планов ускорений кулисных механизмов3. Выбираем полюс плана ускорений (Ра).
4. Строим
Определяем
06.04.2022
лекция 5
35
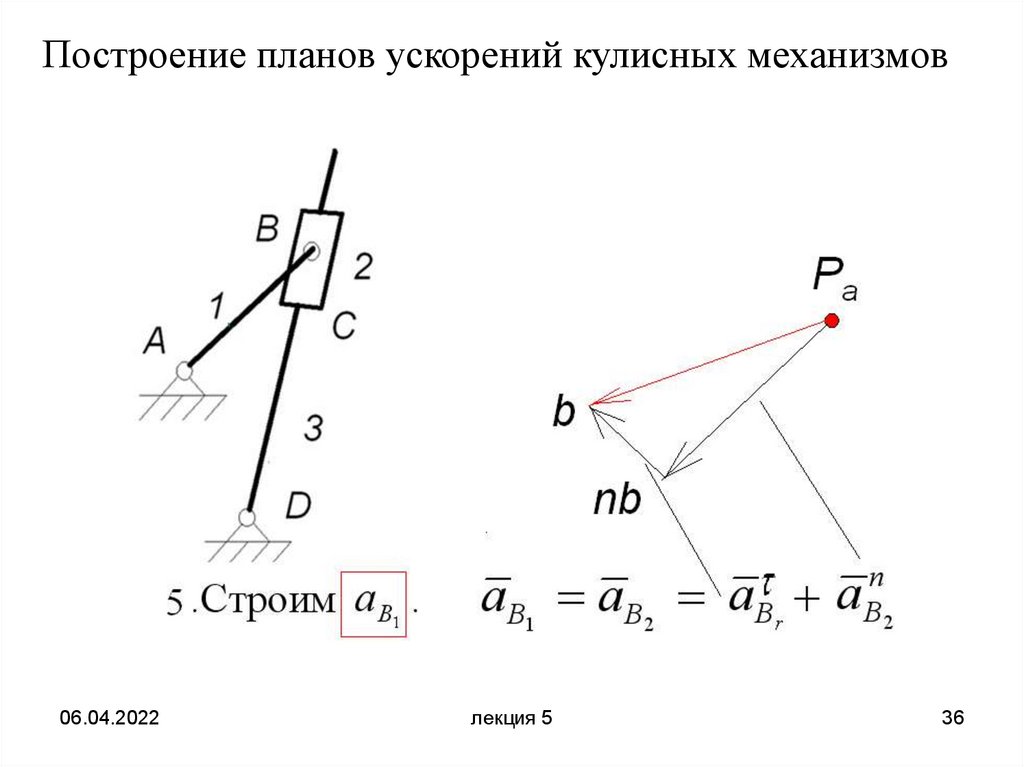
36.
Построение планов ускорений кулисных механизмов06.04.2022
лекция 5
36
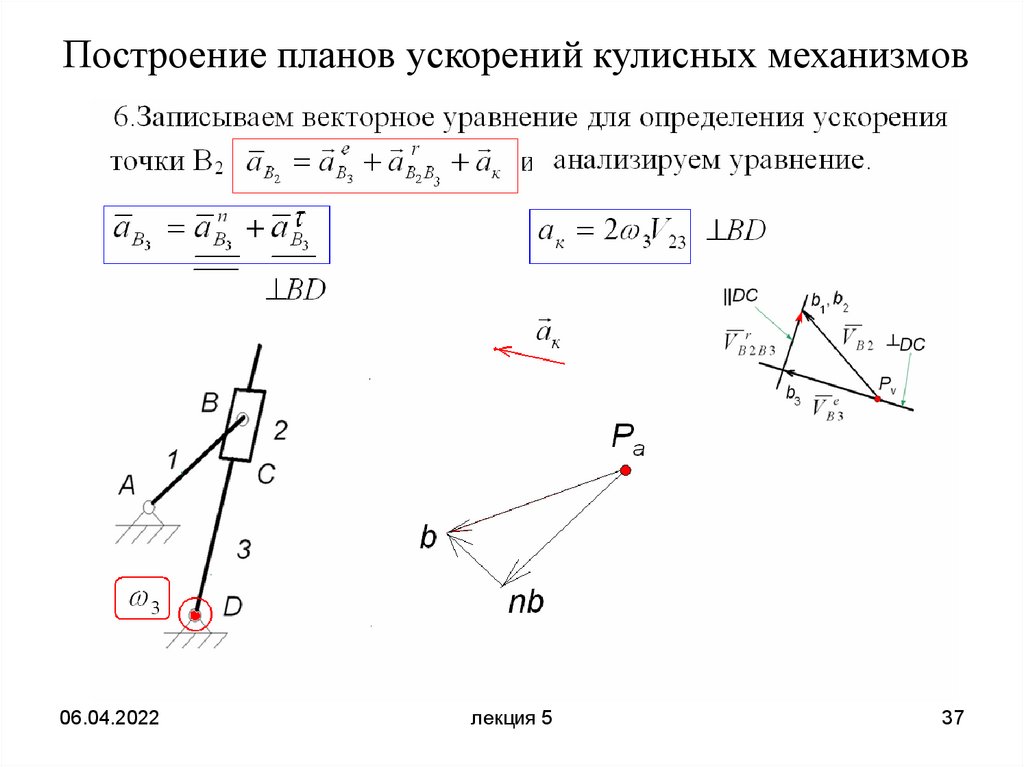
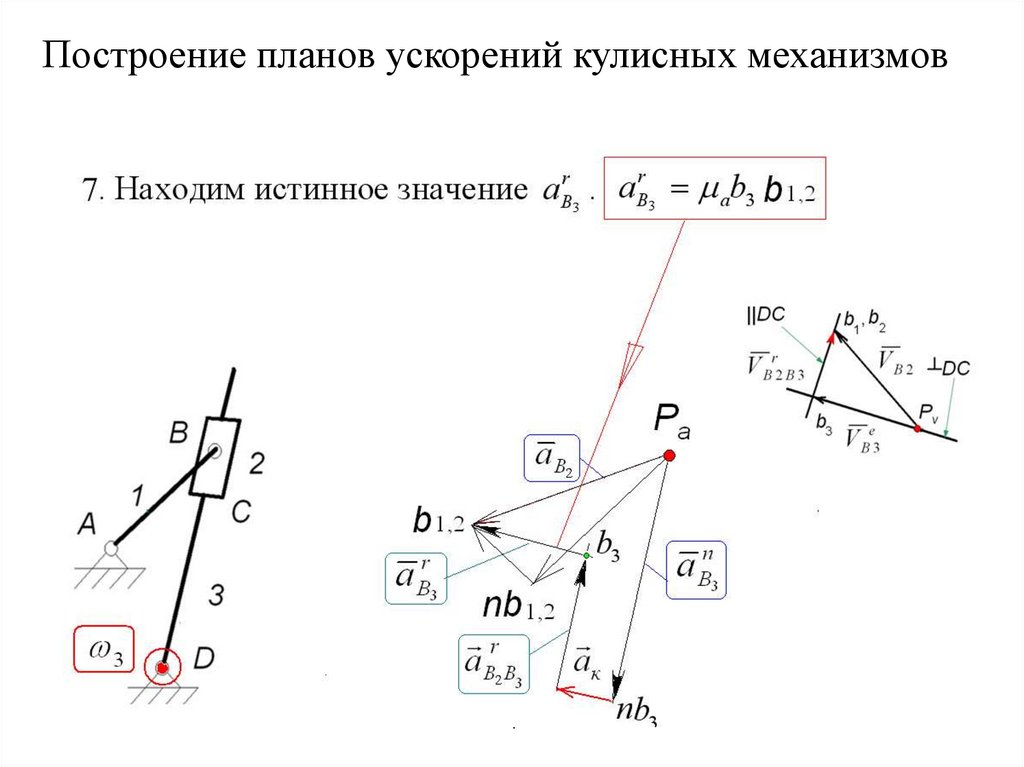
37.
Построение планов ускорений кулисных механизмов06.04.2022
лекция 5
37
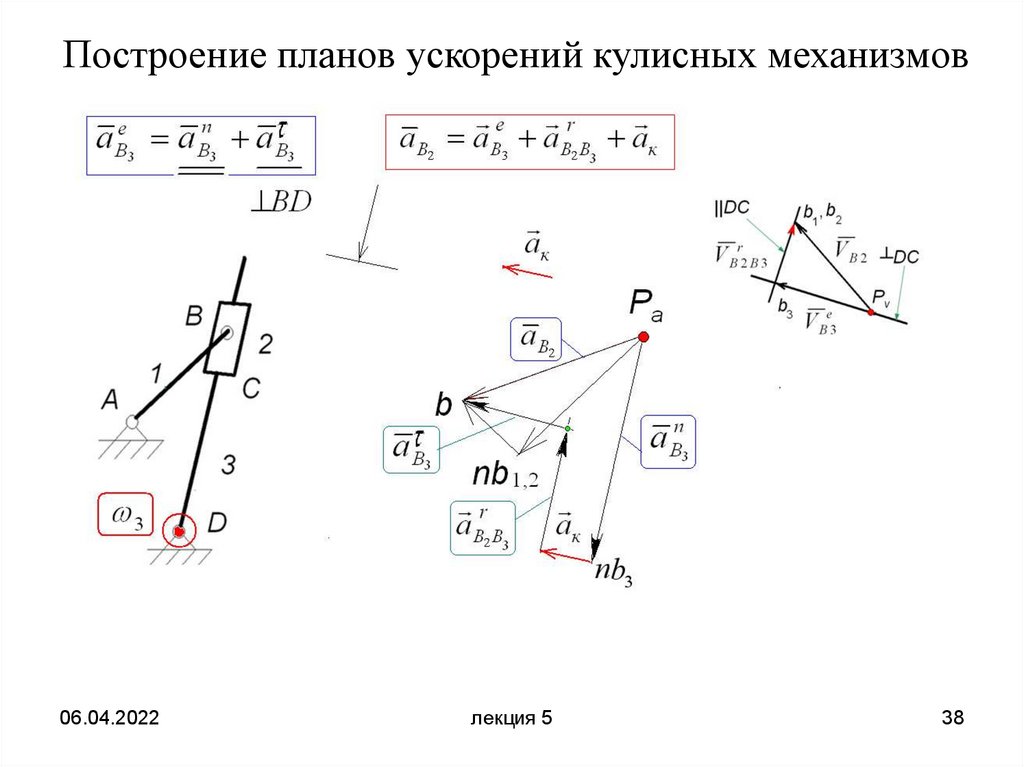
38.
Построение планов ускорений кулисных механизмов06.04.2022
лекция 5
38
39.
Построение планов ускорений кулисных механизмов06.04.2022
лекция 4
39
40.
Построение планов ускорений кулисных механизмов06.04.2022
лекция 5
40
41.
?06.04.2022
лекция 4
41